纯电动汽车异步电动机驱动系统的Saber建模与仿真
2011-06-19 03:00刘和平
微特电机 2011年3期
刘 平,刘和平,郭 军
(重庆大学,重庆400044)
0 引 言
发展电动汽车是人类解决能源短缺危机与大气污染的主要途径之一[1]。电机驱动系统是电动汽车的关键部件,其性能直接决定着电动汽车运行性能的优劣。采用矢量控制策略的低电压异步电动机是纯电动汽车驱动系统极具竞争力的选择之一,其动力特性接近理想车辆驱动场,且能满足电动汽车驱动系统动静态特性好、调速范围宽等性能指标[2-3]。
采用Saber进行前向仿真,其模型间的联系更加接近于车辆的实际情况。这种算法比后向仿真方法在计算整车性能方面的结果更准确,但是计算量过大,所以速度通常要比采用后向仿真方法的软件要慢很多[4]。此外Saber还提供开放的数据接口,可实现与基于Matlab开发的电动汽车仿真软件ADVISOR和PSAT等其它软件的协同仿真。
Saber库中没有本文所需要的全部模型,因此本文采用给Saber中提供的通用模型的参数赋值和根据数学模型准确编写出MAST语言模板建立行为模型这两种方法搭建起各子系统的动态模型,并按照驱动系统的基本框架和功能结构对相应的模块进行封装,建立了纯电动汽车驱动系统模型。
1 驱动系统结构与建模
本文建立的纯电动汽车驱动系统仿真模型直接按照实际驱动系统的布局搭建,主要包括异步电动机本体模块、矢量控制策略模块、循环工况模块、电池模块、减速器和车辆负载模块等。
1.1 异步电动机本体模块
异步电动机本体模块是整个系统中最重要的部分,本系统采用两相静止坐标系下的数学模型[5],其基本方程式如下:
电压方程:
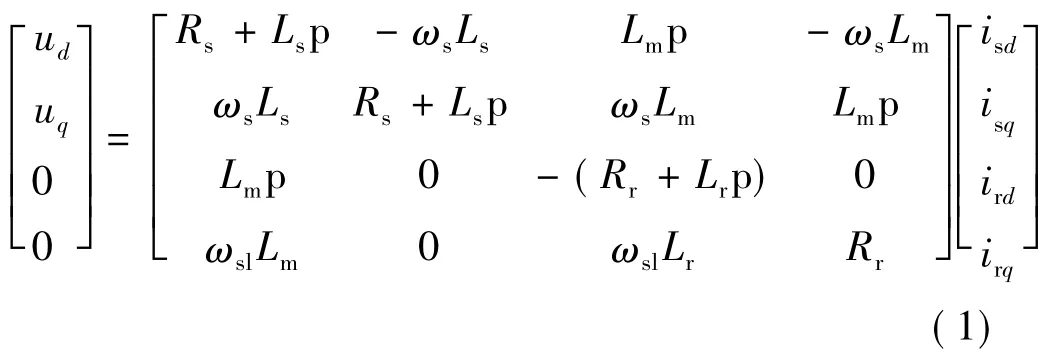
式中:usd、isd分别为定子d轴的电压和电流;usq、isq分别为定子q轴的电压和电流;ird、irq分别为转子d轴和q轴的电流;Rs、Ls分别为d-q坐标系上定子绕组的电阻和自感;Rr、Lr分别为d-q坐标系上转子绕组的电阻和自感;Lm为d-q坐标系上定转子绕组间的互感;p为算子为转差角速度,ωsl=ωs-ωr;ωs为同步角速度;ωr为转子角速度。
转子磁链方程:
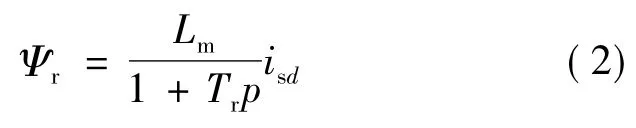
式中:Tr为转子时间常数
转矩方程:
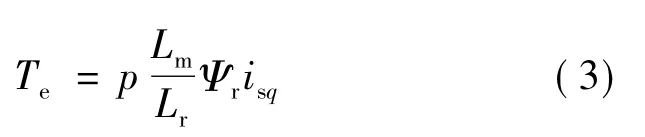
式中:Te为电磁转矩;p为电机极对数。由式(3)可得,在转子磁链Ψr恒定时,通过控制电流isq就能控制电机的电磁转矩Te。
1.2 矢量控制策略模块
矢量控制实现的基本思想是将定子电流分解为相互垂直的两个分量isq和isd[6-7],其中isd用于控制磁链,isq用于调节电磁转矩。
1.2.1 速度控制器

图1 速度控制器框图
速度控制器的作用是将给定转速和实际转速的偏差ωdiff作为速度PI调节器的输入信号,再经过限幅环节后作为参考电磁转矩Teref。限幅环节可以将参考电磁转矩的幅值Tqmax限定在要求的范围内。速度控制器框图如图1所示。
1.2.2 弱磁控制器
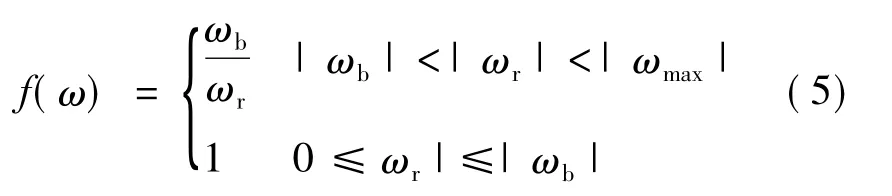
由于构造合适的弱磁曲线较为困难,转子磁链太大或太小都会导致转矩输出性能降低,从而影响系统的动态特性。采用弱磁控制方法[8],使转子磁链参考在ωb以上与转子的实际转速成反比。

1.2.3 转矩控制器
异步电动机的转矩方程式(3)又可以表示:


式中:Tqcmd为给定转矩。转矩控制器如图2所示。

图2 转矩控制器框图
1.2.4 电流控制器与转子磁链角观测器
电流控制器的输入信号是三相实际电流,由3s/2s变换得到d轴电流分量的反馈值和q轴电流分量的反馈值,然后各分量的差值分别作为其调节器的输入信号,再经过限幅环节后作为参考d、q轴电流分量,再由定子电流的2s/3s变换得到三相电流给定值。其中进行坐标变换所需的角度信号由转子磁链角观测器得到:
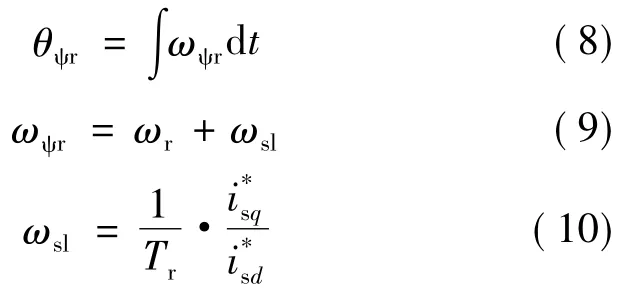
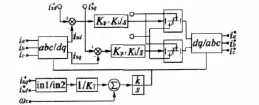
图3 电流控制器框图
1.3 车辆负载模块
参照车辆动力学原理,车辆在直线行驶中所受的阻力有四类[9]:空气阻力Fw、滚动阻力Ff、坡度阻力Fi以及加速阻力Fj。车辆行驶的总阻力:
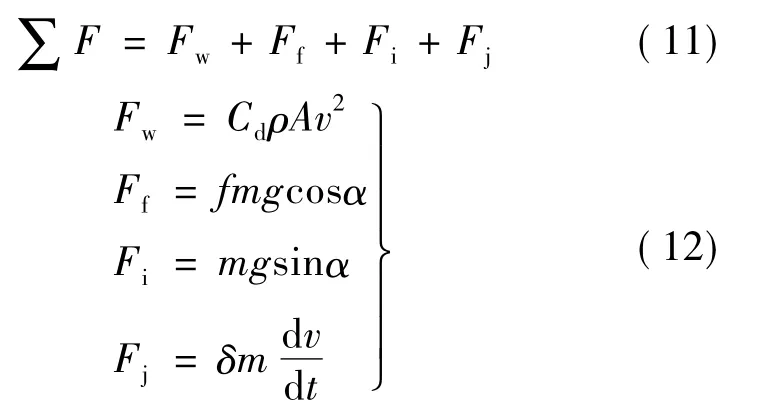
式中:A为迎风面积(m2);Cd为空气阻力系数 (无量纲);ρ为空气密度(kg/m3);v为车速(km/h);f为滚动阻力系数(无量纲);α为坡道的坡度角(rad);δ为车辆旋转质量换算系数(无量纲),δ>1;m为车辆质量(kg);为车辆加速度(m/s2)。
以纯电动汽车行驶速度v乘以式(11)两端,考虑机械损耗经过换算之后可得电机输出功率:
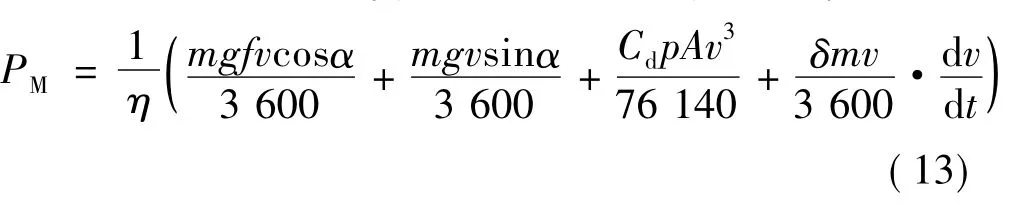
式中:PM为电机驱动系统输出功率(kW)。
1.4 系统模型
将循环工况、蓄电池组、矢量控制策略、电压型逆变器、异步电动机和减速器及车辆负载等模块进行有机结合,在Saber环境下构建了纯电动汽车异步电动机矢量控制驱动系统仿真模型,如图4所示。
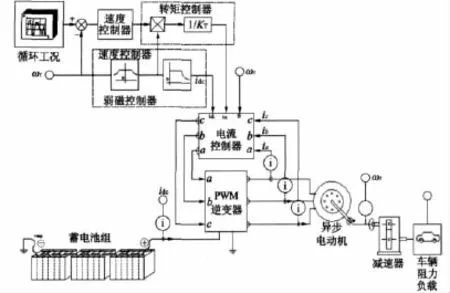
图4 纯电动汽车驱动系统仿真框图
2 仿真分析
系统模型的驱动系相关部件参数如表1所示。
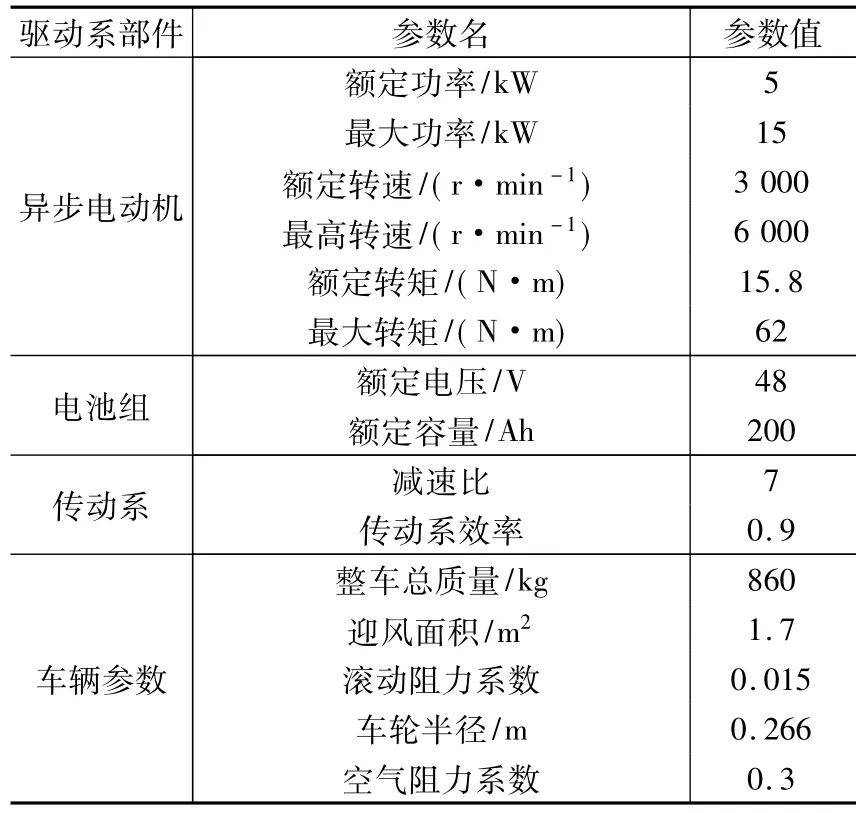
表1 系统模型的驱动系相关部件参数
图5为纯电动汽车无坡行驶时电机输出功率、电机输出转矩、给定与反馈、给定与反馈、电机给定转速和实际转速的动态响应结果。
(1)实际转速能迅速跟随给定转速,且反映出异步电动机基速以内恒转矩,基速以上恒功率特性。
(2)在减速时,输出功率和输出转矩都有较大的回落甚至变成负值,说明电机由电动机运行变为发电机运行,车辆的部分动能转化为电能,并给蓄电池充电,这是电动汽车的再生制动过程。
纯电动汽车的爬坡性是衡量驱动电机参数的重要指标,是决定纯电动汽车额定性能指标的主要因素。在车辆参数不变的情况下,纯电动汽车行驶于无坡与15%坡度时的转矩与功率的比较结果如图6所示。它由静止起动加速到电机3 000 r/min、无坡匀速行驶以及15%坡度行驶等过程组成。
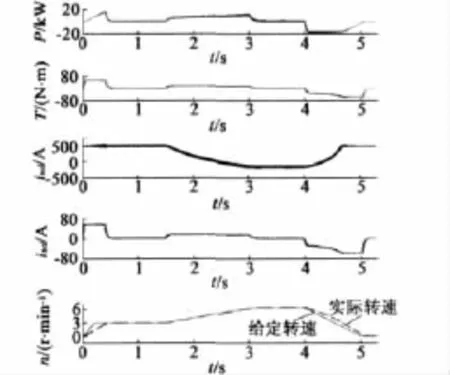
图5 电动汽车无坡行驶时电机的动态响应结果
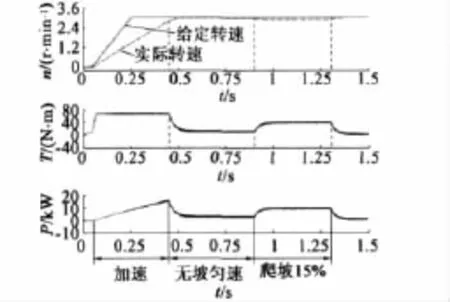
图6 纯电动汽车15%坡度行驶时的转矩与功率比较结果
从图5和图6可知:
(1)驱动电机的最大转矩发生在车辆的加速过程中,功率峰值发生在加速结束进入匀速运行时;
(2)在车辆匀速行驶时,电机的输出转矩和输出功率只需克服恒定的车辆行驶阻力,则电机输出功率和转矩皆为较小的恒定值;
(3)由于爬坡角是恒值15%,即驱动力增加恒定的爬坡阻力值,因此电机转矩和功率曲线只比无坡时略有增加,进而表明在电机的最大功率与转矩参数匹配时应由坡度行驶时的最大阻力来确定。
2.2 循环工况仿真
图7为整车在ECE-15循环工况下的仿真结果。可以看出,车辆的实际车速与转矩都能迅速跟随给定值,且波形符合纯电动汽车动力性要求。
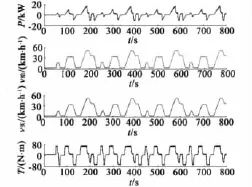
图7 ECE-15循环工况仿真结果
3 结 论
电驱动系统是纯电动汽车的动力核心,其性能的优劣直接影响着车辆的整体性能。稳态建模仿真方法用于电动汽车的设计与分析在近几年已经作了大量的研究,本文通过Saber建立系统各部件的动态模型构造纯电动汽车驱动系统模型,仿真分析后得到如下结论:
(1)Saber软件是面向混合信号的系统仿真软件,但使用中各种控制器的行为模型的建立较难,因此其在电动汽车控制系统仿真中应用并不广泛。本文所建的纯电动汽车异步电动机驱动控制系统模型可为其它各类电动汽车混合系统的Saber建模提供借鉴。
(2)在此驱动控制系统模型基础上,可进一步实现纯电动汽车的再生制动、效率最大化、车辆牵引控制以及其它智能控制策略的研究,设计讨论适用于纯电动汽车的异步电动机控制方法。
(3)仿真验证了电机矢量控制策略以及纯电动汽车驱动系统具有较好的动、静态性能。为纯电动汽车驱动系统选型、零部件参数选择及控制策略的制定提供理论基础和仿真实验依据。通过仿真分析可灵活地调整设计方案,合理优化参数,预测不同条件下纯电动汽车及其子系统的性能,从而节约大量的试验设备和试验时间,有助于样车的制造和试验,为电动汽车的开发提供一个很好的研究仿真平台。
[1]Chan C C.The State of the Art of Electric,Hybrid and Fuel Cell Vehicles[J].Proceedings of the IEEE,2007,95(4):704-718.
[2]Zeraoulia M,Benbouzid M E H,Diallo D.Electric motor drive selection issues for HEV propulsion systems:A Comparative Study[J].IEEE Transactions on Vehicular Technology,2006,55(6):1756-1764.
[4]张翔,钱立军,张柄力,等.电动汽车仿真软件进展[J].系统仿真学报,2004,16(8):1621-1623.
[5]王毅,马洪飞,赵凯岐,等.电动汽车用感应电机磁场定向矢量控制研究[J].中国电机工程学报,2005,25(11):113-117.
[6]Liu Y,Shao C,Ding Y.Modeling and simulating of variable parameters induction motors in electric vehicle applications[J].Journal of System Simulation,2006,18(12):3358-3361.
[7]Liu H,Zhang Y,Zheng Q.Design and simulation of an inverterfed induction motor for electric vehicles[C]//2007 Vehicle Power and Propulsion Conference.2007,Arlington,TX,USA,2008:4.
[8]Briz F,Diez A,Degner M W D,et al.Current and Flux Regulation in Field-Weakening Operation[J].IEEE Trans.on Indus.Appl.,2001,37(1):42-51.
[9]余志生.汽车理论[M].北京:机械工业出版社,2009:7-20.
猜你喜欢
防爆电机(2022年2期)2022-04-26
煤气与热力(2021年12期)2022-01-19
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
海外星云(2016年17期)2016-12-01
通信电源技术(2016年1期)2016-04-16
微特电机(2015年1期)2015-07-09
中国塑料(2014年12期)2014-10-17
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年10期)2014-02-28