
基于HLA和Vega Prime导弹作战虚拟仿真系统研究
2011-06-01 08:01黄心汉
中南大学学报(自然科学版) 2011年4期
彭 亮,黄心汉
(华中科技大学 控制科学与工程系,湖北 武汉,430074)
导弹作为远程精确制导武器装备,在现代战争中起着越来越重要的作用。但由于导弹系统本身体积庞大,系统复杂,造价昂贵,在进行训练操作时会造成装备不断损耗;此外,环境条件、天气状况、协同单位和装备等,极大地限制了部队操作训练的开展。HLA(高层体系结构)和虚拟现实技术应用于导弹武器仿真系统,可以为操作人员构建逼真地貌、自然景象和威胁等组成的战场环境,在计算机上模拟操作训练过程,进行导弹操作流程和具体动作的模拟训练。虚拟现实仿真技术是20世纪80年代末发展起来的一项仿真技术,它以良好的沉浸感、逼真度和人机交互性能已应用于军事、航空航天、建筑、娱乐和医疗等领域[1-2]。Vega Prime是Multigen公司开发的跨平台实时三维视景仿真系统开发工具,是从Vega基础上发展起来的新一代仿真软件,与Vega相比,它支持跨平台,具有更简捷的配置工具,扩展性更强[3]。在此,本文作者利用HLA技术框架,采用Vega Prime虚拟现实技术建立的导弹作战虚拟仿真系统,不仅可以解除各不利因素的制约,提高训练质量,降低训练成本,而且对改善战术战法和提高技术指挥水平具有重要 意义。
1 仿真系统组成及功能
1.1 HLA/RTI
HLA (High level architecture)是1995年由美国国防部(DOD)在其建模与仿真技术框架中提出的,它的核心思想是互操作和重用[4]。其显著的特点是通过运行支撑环境(RTI,即Run time infrastructure)提供通用的、相对独立的支撑服务程序,将仿真应用层与底层支撑环境功能分离开,即将具体的仿真功能实现、仿真运行管理和底层传输三者分离,隐蔽了各自的实现细节,从而使各个部分可以相对独立地开发,并能充分利用各自领域的先进技术[5-7]。在导弹作战虚拟仿真系统中应用 HLA技术框架,可使仿真设计工作集中于仿真类、交互类之间的交互设计,而不必关心底层网络通信、时钟管理等细节,对于导弹作战虚拟仿真系统开发非常方便。
1.2 仿真想定
本文所设计的导弹作战虚拟仿真系统采用HLA/RTI规范为核心的技术框架,以仿真资源为核心,从系统的角度对导弹作战虚拟仿真系统的对抗过程进行仿真,为导弹武器系统的设计和作战攻防对抗提供依据。所设计的导弹作战虚拟仿真系统的背景想定为如下情形:将红、蓝设定为仿真对抗的双方,红方巡洋舰在海域执行任务,通过战斗指挥自动化成员的雷达和卫星等搜索作战区域,一旦有扫描到有蓝方目标进入作战区域,战斗指挥自动化成员就会对目标威胁进行判断,按照威胁由大到小的顺序进行攻击。导弹的发射、目标分配和制导均由战斗指挥自动化成员完成。一旦发射,导弹控制系统依靠各种传感器所感知到的数据信息(包括飞行参数和战场环境的信息)作出实时分析处理,不断更新控制命令,控制导弹依据环境采取相应的策略进行攻击,直到摧毁目标为止。如果目标在导弹飞行过程中不存在,就通过战斗指挥自动化成员指挥导弹对另外的目标进行攻击;如果导弹飞行超过了设计时间,导弹就会自毁。蓝方依靠雷达以及预警机探测到红方发射的导弹后,根据蓝方控制中心发出命令进行机动规避并对红方导弹予以拦截。导演方成员是整个作战仿真的管理者和见证人,负责记录各种事件,同时也呈现过程场景。
1.3 仿真平台的联邦结构
根据实际导弹武器系统的组成和功能特点以及HLA技术框架,建构导弹武器系统虚拟仿真平台,其结构如图1所示[8-9]。本仿真系统联邦主要由以下联邦成员组成:导演方成员、仿真管理平台成员、导弹武器系统成员、导弹控制系统成员、战斗指挥自动化成员、战场环境成员、仿真模型库成员等,该系统可以完成设定剧情的作战仿真,实现导弹作战过程。

图1 仿真系统逻辑结构Fig.1 Logical structure of simulation system
图1 中,导演方成员、导弹武器系统成员、导弹控制系统成员等各自作为联邦成员加入到联邦中,通过运行支撑环境RTI进行交互通信。随着仿真要求的提高,还可以加入其他成员来扩充系统功能。
2 基于HLA的仿真系统设计
2.1 任务空间任务模型
根据想定,在本战场,环境仿真系统的主要任务模型有巡洋舰、导弹武器系统、导弹控制系统、雷达、卫星、火炮阵地、蓝方控制中心等,其主要功能为:
(1) 巡洋舰模拟舰艇机动特性和行为,完成在海上巡弋的任务;
(2) 导弹武器系统模拟各种导弹的外形和构造特征以及其在弹道上的飞行动作;
(3) 导弹控制系统根据雷达等传感器探测的各种战场信息,完成导弹的飞行弹道计算,计算导弹的位姿并控制导弹飞行;
(4) 雷达和卫星获取实时战场环境信息;
(5) 火炮阵地模拟阵地目标的机动行为;
(6) 蓝方控制中心根据雷达、卫星和预警机获取的战场信息控制己方火力武器的规避以及拦截。
2.2 FOM/SOM开发设计
FOM 表描述联邦执行中各个联邦成员之间进行交互的全部共享信息,是各联邦成员发布的对象类和交互类信息的集合。SOM 是单一联邦成员的对象模型,它描述了单个联邦成员对联邦其他成员的需求及向其他联邦成员提供信息的能力。在 HLA仿真系统中,对象模型模板(OMT,即 Object model template)是联邦执行交互数据的基础,各个联邦成员通过发布其联邦成员感兴趣的对象类和交互类,订购自己所需要的对象类和交互类,来实现联邦成员之间的信息交换和互操作。对象类和交互类的设计实际上是确定各个联邦成员之间的数据流和控制流[10-11]。
2.2.1 对象类设计
根据任务空间概念模型,本系统包含以下对象类:巡洋舰、导弹武器系统、导弹控制系统、雷达、火炮阵地、蓝方控制中心、仿真管理平台等。
根据以上对象类的确定,设计出对象类信息表,如表1所示。

表1 对象类信息表Table1 Table of object class information
2.2.2 交互类设计
联邦成员之间交换信息是作战建模仿真的基础。HLA交互类用交互名和一系列参数来定义。本系统的交互类包括管理交互、运动参数改变交互以及导弹武器攻击交互等。根据对象类信息表,设计出交互类信息表,如表2所示。表2中:Fire 表示是否已经发射导弹;Damage表示是否导弹击中敌方目标;Kill Probability表示导弹命中目标后对目标的损毁程度。

表2 交互类信息表Table2 Table of interactive class information
2.2.3 联邦成员对对象类以及交互类的发布与订购关系
根据以上对象类信息表以及交互类信息表,设计出联邦成员对对象类以及交互类的发布与订购关系,如表3所示。

表3 联邦成员对象类以及交互类的发布与订购关系Table3 Relationship between release and order of federates object class and federates interactive class
2.3 程序流程和联邦线程
虚拟现实环境下的联邦成员既要不断刷新虚拟场景的显示,又要进行联邦成员之间的通信,在虚拟现实环境下联邦成员的实现中,采用多线程技术,增强了系统的实时性。联邦成员的程序流程和联邦线程分别如图2和图3所示。联邦运行时,巡洋舰联邦成员和预警机联邦成员根据初始值开始运行,创建联邦,并实时显示场景、巡洋舰和预警机的三维立体效果;联邦创建之后,联邦成员加入联邦,联邦成员之间开始实时互操作,不断更新自己发布的巡洋舰、预警机和导弹对象实例的位置和状态。用户可选择退出联邦、终止操作和发射导弹。当仿真完成后,所有成员退出联邦,由最后退出的成员销毁联邦[12-13]。

图2 联邦成员的程序流程图Fig.2 Program flow chart of federates

图3 联邦线程图Fig.3 Thread flow of federation
3 仿真系统的实现
虚拟仿真是仿真系统中的关键组成部分,影响着仿真系统的整体真实性和训练任务逼真度。逼真的视景环境可以使训练人员仿佛进入了真实世界,使其能完成许多战术项目。为了使训练人员沉浸于虚拟战场环境中,需要建立逼真的虚拟战场环境,包括地表状况、文化特征(如房屋、道路、树木,动态实体)、自然现象、特殊效果等。这里将结合联邦成员的开发,介绍虚拟环境的建立和视景驱动的开发方法,对视景仿真开发过程中相关技术的实现进行研究。系统采用Visual C++.net开发平台进行程序设计与开发[10],采用Creator可视化建模工具建立实体模型。采用的三维图形引擎Vega Prime是MultiGen-Paradigm公司开发的跨平台实时三维视景仿真系统开发工具[11-12]。
3.1 虚拟场景的构造
3.1.1 地形建模
地形模型是一个数据量很大的复杂模型,在仿真中如不加以简化将很难实现实时显示,所以,必须采用LOD (Level of detail)技术,根据特定条件,适当选择某个细节层次进行相应显示。
本仿真采用的地形数据库是以1个海洋中的小岛为背景,在岛屿中加入城市、高山、植被以及敌方军事基地、雷达等要素,较逼真地显示出一个合理的战场环境。图4所示为海洋中小岛的宏观成像。由图4可见:由于地形数据库中的数据量太大,因此,将整个地形数据分割成为很多个小的块状图,整个地形图同文件名的文件组织成块状文件,通过Creator提供的外部引用技术(引用其他数据库中的文件到当前数据库),使不同区域使用相同物体的大型复杂数据库得以简化[14]。
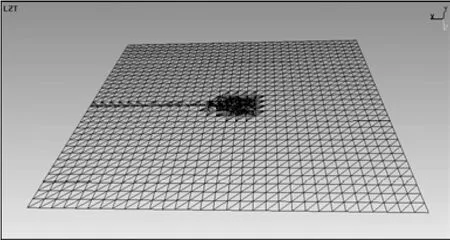
图4 海洋及小岛的宏观景象Fig.4 Macroscopic image of ocean and isle
3.1.2 建模中的关键技术
由于仿真环境的仿真是一个极其复杂的过程,其中涉及的视景模型包括大规模的地形数据库以及在这个大的地形背景下运动的战场要素模型如坦克、战斗机等;因此,作为战场仿真,对系统的实时性和逼真性2方面都达到很高的要求。在实时交互场景中,三维场景和各种物体的绘制是由一个个面组成的,面越多,划分越细,则最终的物体效果将越逼真,但过多的面使得三维动画场景的计算量较大,减慢了物体的渲染速度。为达到画面平滑,扫描速度必须在60帧/s内,最低不能低于10帧/s,为保持较好的实时性,最好为 30~60帧/s。即使目前计算机的运算速度及图形处理设备的速度已极大提高,也仍不能完全满足现实中仿真可视化的要求。为了解决实时性和逼真性的问题,系统利用Creator软件提供了几个关键的技术以解决在实时性和逼真性之间的矛盾[15]。
(1) Instance实例技术。在创建大型场景时,会用到许多相同或类似的几何体,如一些建筑、树木、路灯等自然景象,或者是虚拟仿真场景中的各种重复出现的军用仓库、营房等建筑物模型、各种武器模型、虚拟的士兵模型等。一个个场景创建然后存储无疑会占用大量的计算机内存、硬盘空间,增大处理时间,从而影响实时显示速度。解决的方法就是使用Instance(实例) 技术。相同的几何体可以共享同一个模型数据,通过矩阵变化安置在不同的地方,这时只需要一个几何体数据的存储空间。Instance就好像一个物体的副本,但又不同于副本。因为它仅仅是指向1个已存在的物体,并不实际占用内存。它通过几何变换方法实现。数据库中每个实例可按所需进行比例缩放后应用。使用时内存仅调用1次,大大加快了显示速度。
(2) External Reference外部引用技术。External Reference 即外部引用,指引用其他数据库中的文件到当前数据库,通过它可以减少硬盘空间,简化数据库。它与Instance 不同点在于它是只读的,只能被平移、缩放、转向,而不能在该数据库中编辑,需要修改时,只能到它原来所在的数据库中修改。在该仿真平台中,充分利用以上技术,取得了较好的仿真效果。
(3) 纹理映射技术。虚拟环境中仅仅有体和面的结构是不能产生仿真环境的真实感觉的,还需要对表面进行处理即加表面反射和纹理。对纹理的处理,Multigen提供多种纹理贴图方式,同时还提供了一种动态纹理贴图,可以根据不同的要求,选择不同的贴图方式。
3.2 仿真实现
当确定了实体模型和环境特效以后,就需要用实时视景集成软件 Vega Prime来构建整个虚拟场景。Vega Prime包括完整的C++语言应用程序接口API,可以满足软件开发人员要求的最大限度的灵活性和功能定制[16]。虚拟场景仿真流程如图5所示。
在该仿真系统下对某型导弹进行视景仿真试验,运行结果如图6和图7所示。其中:图6所示为导弹的爬升状态截图,图7所示为仿真系统总体框架的界面图。

图5 Vega Prime应用程序流程图Fig.5 Application program flow chart of Vega Prime

图6 导弹飞行图Fig.6 Missile flight drawing
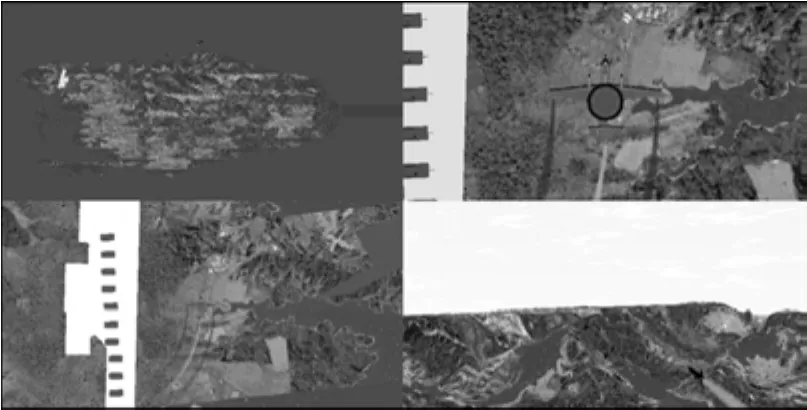
图7 总界面图Fig.7 Total interface drawing
4 结论
(1) 以先进的 HLA仿真体系为基础,对导弹武器系统在多种武器合成的战场环境模式下进行虚拟仿真。从运行结构、开发过程等方面对仿真系统进行整体描述,从实体设计、想定编辑、联邦成员规划和效能评估等方面分析系统功能,明确了系统联邦成员的划分及任务分配,并根据总体设计框架给出了导弹武器系统的作战联邦实例。
(2) 该系统逼真地模仿了导弹作战攻防双方的各项基本功能,利用联邦设计具备扩展敌我双方实施多武器攻防的能力,系统中的任何一个功能模块(联邦成员)都可以方便地替换或升级,使仿真联邦增加新的成员也非常方便。经过适当扩充,此系统可以作为更大规模虚拟作战系统的核心部分。
[1] 古伊, 高井祥, 孙九运. 基于Creator Pro/Vega Prime的三维地形仿真技术[J]. 矿山测量, 2005(1): 27-29.
GU Yi, GAO Jing-xiang, SUN Jiu-yun. Description of Creator Pro/Vega Prime based three-dimensional topographic simulation techniques[J]. Mine Surveying, 2005(1): 27-29.
[2] 王云翔, 赵经成, 付战平, 等. 基于Vega Prime的视景仿真驱动技术研究[J]. 微型计算机信息, 2008, 24(3): 214-216.
WANG Yun-xiang, ZHAO Jing-cheng, FU Zhan-ping, et al.Research of scene simulation drive technique based on Vega Prime[J]. Microcomputer Information, 2008, 24(3): 214-216.
[3] 彭亮, 黄心汉. 基于VC和Vega Prime联合开发的巡航导弹仿真系统研究[J]. 中南大学学报: 自然科学版, 2010, 41(1):219-224.
PENG Liang, HUANG Xin-han. Simulation system of cruise missile using VC and Vega Prime[J]. Journal of Central South University: Science and Technology, 2010, 41(1): 219-224.
[4] 宋英伟, 李楠, 徐肖豪. 基于HLA/Vega Prime的塔台训练仿真系统设计与实现[C]//第十四届全国图像图形学学术会议.福州, 2008: 731-735.
SONG Ying-wei, LI Nan, XU Xiao-hao. Design and realization of tower training simulation system based on HLA/Vega prime[C]//The 14th International Conference on Image and Graphics. Fuzhou, 2008: 731-735.
[5] 苏颖, 康凤举, 阎晋屯, 等. 基于 HLA 的水下战仿真系统研究[J].系统仿真学报, 2004, 16(12): 2732-2736.
SU Ying, KANG Feng-ju, YAN Jin-tun, et al. Research on HLA-compliant underwater warfare simulation system[J].Journal of System Simulation, 2004, 16(12): 2732-2736.
[6] 李向阳, 黄先祥, 龙勇, 等. 基于 HLA 的地地导弹操作训练仿真系统设计[J]. 系统仿真学报, 2008, 20(21): 5821-5824.
LI Xiang-yang, HUANG Xian-xiang, LONG Yong, et al.Development of surface-to-surface missile operation training simulation system based on HLA[J]. Journal of System Simulation, 2008, 20(21): 5821-5824.
[7] 郭浩波, 王颖龙, 曾辉. 基于 HLA的地空导弹拦截仿真系统的开发[J]. 情报指挥控制系统与仿真技术, 2005, 27(5): 82-87.
GUO Hao-bo, WANG Ying-long, ZENG Hui. The development of ground-to-air missile intercept simulation system based on HLA[J]. Information Command Control System & Simulation Technology, 2005, 27(5): 82-87.
[8] Vardanega F, Maziero C. A Generic rollback manager for optimistic HLA simulations[C]//Proceedings of the Fourth IEEE International Workshop, Distributed Simulation and Real-Time Applications. USA: IEEE, 2000: 79-85.
[9] ZHAO Hui, Geroganas N D. An approach for stream transmission over HLA-RTI in distributed virtual environments[C]//Proceedings of the 3rd IEEE International Workshop, Distributed Interactive Simulation and Real-Time Applications. USA: IEEE, 1999: 67-74.
[10] 郭义喜, 李海林. HLA中的对象模型浅析[J]. 系统仿真学报,2006, 18(1): 277-279.
GUO Yi-xi, LI Hai-lin. Analysis on object models of HLA-based simulation[J]. Journal of System Simulation, 2006, 18(1):277-279.
[11] 张宇宏, 胡亚海, 彭晓源, 等. 基于 HLA 的防空导弹武器系统仿真平台研究[J]. 北京航空航天大学学报, 2003, 29(1): 1-4.
ZHANG Yu-hong, HU Ya-hai, PENG Xiao-yuan, et al.Simulation platform based on HLA for air defense missile weapon system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2003, 29(1): 1-4.
[12] 王毅增, 张继龙, 刘志勤. 基于 HLA的地空导弹指控模型仿真研究[J]. 计算机仿真, 2004, 21(12): 51-53.
WANG Yi-zeng, ZHANG Ji-long, LIU Zhi-qin. C2model of ground-to-air missile system with HLA-based simulation[J].Computer Simulation, 2004, 21(12): 51-53.
[13] 白梅, 张茂林. 基于HLA的装备战斗损伤仿真平台设计方案[J]. 计算机工程, 2006, 32(13): 231-233.
BAI Mei, ZHANG Mao-lin. HLA-compliant design project for equipment battle damage simulation platform[J]. Computer Engineering, 2006, 32(13): 231-233.
[14] 舒娱琴, 唐丽玉, 彭国均. 采用 Creator生成三维地形[J]. 测绘信息与工程, 2003, 28(5): 9-11.
SHU Yu-qin, TANG Li-yu, PENG Guo-jun. Generating 3D terrain in creator[J]. Journal of Geomatics, 2003, 28(5): 9-11.
[15] YANG Si, LI Xiao-min, XIE Hui. UAV servicing and training system based on VR and HLA[C]//The Eighth International Conference on Electronic Measurement and Instruments. Xi’an,2007: 341-345.
[16] CHEN Gang, GAN Zhi-chun, SHENG Jian-jun, et al. Equipment simulation training system based on virtual reality[C]//International Conference on Computer and Electrical Engineering.Zhengzhou, 2008: 563-567.
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
家庭影院技术(2020年10期)2020-12-14
家庭影院技术(2019年7期)2019-08-27
小哥白尼·军事科学画报(2017年3期)2017-06-12
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
舰船科学技术(2015年8期)2015-02-27
作文与考试·小学低年级版(2014年11期)2014-11-05
振动、测试与诊断(2014年4期)2014-03-01
俄罗斯问题研究(2013年1期)2013-03-11
