低轨道运动目标傅里叶望远镜发射器设计
2011-05-12 07:56罗秀娟马彩文司庆丹
深圳大学学报(理工版) 2011年4期
罗秀娟,马彩文,张 羽,司庆丹
中国科学院西安光学精密机械研究所,西安 710119
低轨道运动目标傅里叶望远镜发射器设计
罗秀娟,马彩文,张 羽,司庆丹
中国科学院西安光学精密机械研究所,西安 710119
为高分辨率探测与识别空间低轨道运动目标,提出一套傅里叶望远镜发射器阵列配置方案及单个发射器设计方案.该发射器系统整合了大气畸变测量系统、反馈控制校正系统及目标跟踪系统;利用大气湍流波前矫正跟踪技术实现对快速运动目标的准确跟踪;通过同时发射多束干涉激光扫描目标的方法提高成像速度;对激光束干涉及其在湍流大气中斜程传播等情况进行计算机仿真.理论分析和仿真结果表明,该方案可满足低轨道运动目标快速成像对傅里叶望远镜发射器的设计要求.
傅里叶望远镜;主动成像;激光;长基线干涉;低轨道;运动目标跟踪;空间高分辨率;空间探测
傅里叶望远镜成像技术是一种主动光学综合孔径高分辨率成像技术.它突破了望远镜口径的限制,使望远镜的分辨率与接收器孔径大小无关,并能透过大气湍流高分辨率成像[1].傅里叶望远镜利用经不同频率调制后的多束干涉激光主动扫描目标,用一个大接收器上的光电探测器测量目标反射强度信息,解调这些信号、得到不同空间频率点的傅里叶频谱,再通过逆傅里叶变换重建目标的图像.同时,利用相位闭合与频率调制技术抑制大气湍流对成像的影响、消除激光束间的随机大气相位误差.傅里叶望远镜成像技术,克服了自适应光学或子口径拼接使设备复杂化、无法从根本上解决分辨率与口径常规关系的问题.可解决困扰人类几个世纪的大气扰动影响光学成像的难题,具有探测与识别远距离暗弱目标的突出优势.理论上,傅里叶望远镜的角分辨率可达到纳弧度量级[2],能获取同步轨道目标的高分辨率图像.
与单光源照射、多孔径接收的长基线干涉测量法相逆,傅里叶望远镜采用多孔径照射、单接收器接收.选定激光的波长后,分辨率只取决于发射器阵列的基线长度.合理设计、配置发射阵列,可得到所需图像分辨率的所有傅里叶分量.发射器系统是傅里叶望远镜关键组成部分,直接影响整个系统的成像能力.人们对相对于地球位置不变的深空目标成像的傅里叶望远术 (Fourier telescopy,FT)进行了广泛研究[3-8],而对探测空间快速运动目标的傅里叶望远镜系统的研究仍处于系统概念设计与实验室演示阶段[9-11].虽有文献介绍傅里叶望远镜接收器的设计及其性能[6,12],但尚无详细介绍发射器设计的文章.本文针对低轨道 (low earth orbit,LEO)卫星等运动目标,设计了傅里叶望远镜发射器系统并进行了相应的理论分析与计算机仿真.
1 发射器阵列配置方案
发射器阵列设计为T型基线配置阵列 (图1).要实现对LEO目标的快速成像,发射器阵列须同时发射多束干涉激光扫描目标.这些从同一激光源经分束而成的每一束激光都是相干光,照射到目标后,形成相干条纹.
为降低信号激光源的功率并实现不同基线配置,将阵列中的发射器分成不同的组.每组分配一束激光,由转发器将其分时转发到几个发射器.在同一时刻,每组仅一个发射器发射激光束;但在不同时刻,每组中的各发射器轮换发射激光束.用作相位闭合参考的发射器布置在T型阵列交叉处,它不属于任何分组且始终激活.若发射器阵列的分组数目或转发器总数为Ng,每组中的孔径数目是Na,发射器的总数则为Na×Ng+1.

图1 发射器阵列与激光分束示意图Fig.1 Transmitter array and beam splitter
转发器是一个可旋转的光学装置.入射光经过转发器后,被反射偏转不同的角度,使出射光照射相应的发射孔径.可旋转式转发器不但增强了系统的灵活性,还降低了系统对激光器功率的要求.
从图2中的激光矢量关系得到空间频率与发射孔径的间距及方向的关系为

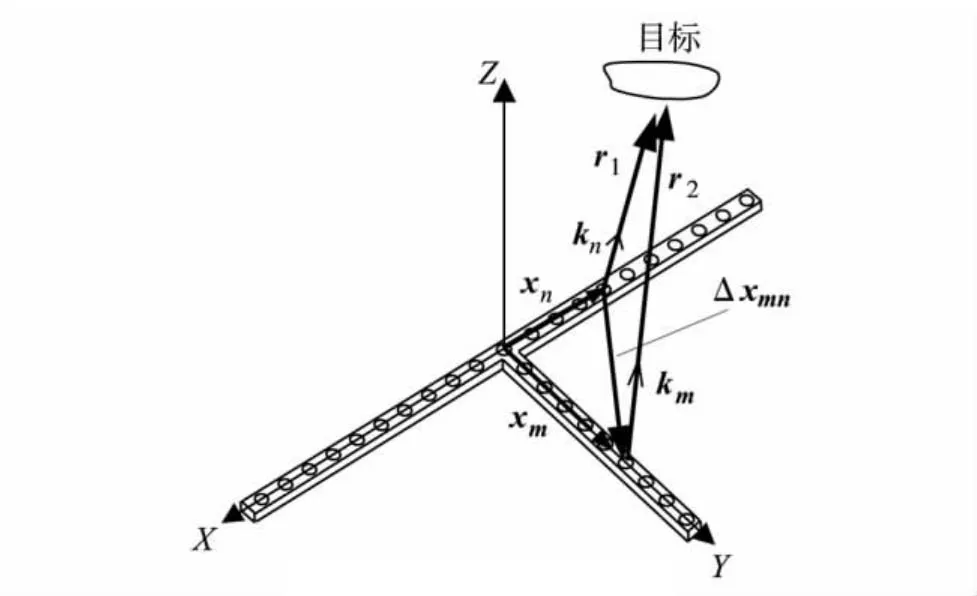
图2 激光信号矢量图Fig.2 Vectors of laser signals
其中,Δxmn=xm-xn;K为空间频率分量;xm和xn分别为位于发射阵列不同组中的第m和第n个发射器在空间域中的位置矢量,km和kn分别为它们发射光束的波矢量;R为发射器到目标的距离;λ为激光波长.式 (1)表明,每一点空间频率K对应于空间域中某一对激光束发射孔径的取向距离Δxmn.换言之,空间频率取决于发射孔径的间距与方向.K或Δx称为基线(baseline).阵列中相距最远的两个发射器的间距就是望远镜的等效孔径值.
为实现大量傅里叶分量采样,需利用发射器不同的组合方式来发射激光,使空间频率采样充满傅里叶空间,进而形成一幅较好的目标图像.根据上述发射器阵列配置方案,我们进行理论推导,得出从目标反射回的信号为

其中,Δωmn=ωm-ωn-Kmnv;φmn=φm-φn;S为目标返回信号;c为比例常数;T为采样时间;I0为激光束在目标上的电场;O为目标反射强度分布;c.c.是前一项的共轭复数.ωm和ωn分别为第m和第n个发射孔径的调制频率,φm和φn分别为它们发射的激光到达目标的相位(包括初始相位、自由空间传播相位和湍流扰动相位);v是目标运行的速度.
由式 (2)可见,从目标返回的信号由各种频率分量叠加而成.每个频率分量的幅值O(K=Kmn)是目标反射强度分布的空间傅里叶变换,其逆变换正是目标图像 (反射强度分布).因此,可运用傅里叶解调方法从目标返回的信号中提取各种频率分量的复数幅值O(K=Kmn),得到目标返回信号频率分量的强度和相位信息;再经相位闭合处理掉随机相位φmn即可重建出目标图像.
从同一激光源经分束而成的激光束的光强相对较弱,因此信号激光源要用高强度光源.对LEO目标,发射的每束光功率约为100~300 W.可选用连续波Nd∶YAG固体激光器作为信号激光源,其波长 λ0为1.06 ~1.08 μm.该波长的激光器性能比较稳定,激光束在大气中的传输状况较好,透射率达到0.6,目标材料对该波长的激光束反射率较高,近0.5.图3是当Ng=9,Na=5时的发射孔径布局和相应的基线图计算机仿真结果.显然,该T型配置的发射器系统易于扩展,可通过增加发射器阵列的大小来增加基线长度,从而提高成像分辨率.
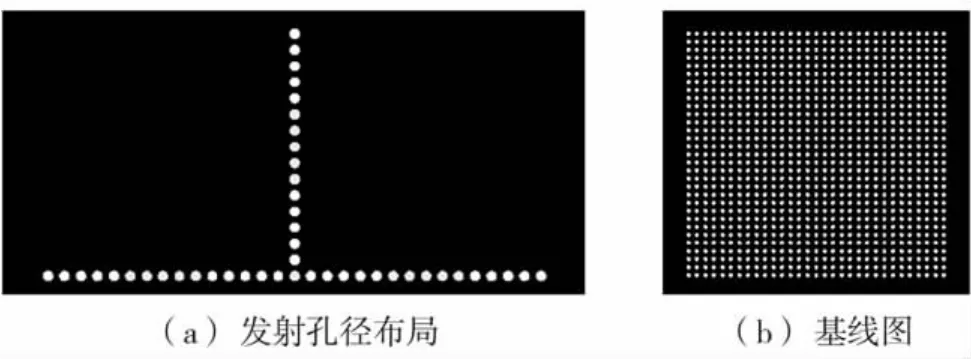
图3 发射孔径布局及相应的基线图Fig.3 Transmitter aperture layout and corresponding baselines
图4是在未考虑大气湍流影响时,两个发射器m和n的波前及其在1 000 km远的目标上产生干涉条纹的仿真结果,进一步证明了从同一激光源经分束而成的两束激光在目标上可形成相干条纹,符合傅里叶望远镜的设计要求.理论分析与仿真结果表明该发射器阵列配置方案合理可行.
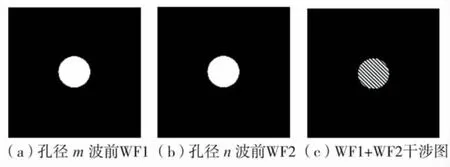
图4 发射孔径波前及其干涉图Fig.4 Wavefront of two transmitter apertures and their fringe pattern
2 单个发射器设计方案
典型的 LEO 卫星的运行速度为 7.5 mrad/s[11].若卫星运行轨道高度为1 000 km,则卫星相对于地面的速度为7.5 km/s.要实现对这样快速运动目标的成像,需准确跟踪目标.因此,我们对每个发射器设计有大气湍流波前畸形测量系统、反馈控制校正系统及目标跟踪系统 (如图5).信号激光、波前测量光和跟踪照明光的波长分别为λ0、λ1和λ2.这些系统可设计成一个整合系统.另一种节省的做法是将这种整合系统安装在每个转发器,而非每一个发射器上.采用镀膜等技术,使光学镜可透射某一波长的光,却全反射另一波长的光.
光束通过大气传输过程中,大气湍流引起的波前畸变主要是整体倾斜,占全部波前畸变的87%左右.与一般望远镜系统不同,我们在傅里叶望远镜发射器系统中设计大气湍流波前畸形测量装置的主要目的不是用于直接成像,而是用于获取较为理想的干涉条纹并准确跟踪空间运动目标.因此,发射器中用一面动态范围较大的高速倾斜反射镜 (slant mirror,SM)来校正波前畸变的整体倾斜.必要时,可增加变形镜 (deformable mirror,DM)来校正其他高阶像差.波前传感器可安装在每个发射器上或只安装在每一转发器上.选用横向剪切干涉仪(lateral sheer interferometer,LSI)作为波前畸变传感器WFS.WFS通过接收从目标反射回来的波前测量激光来进行大气波前畸变的测量,再将测量的倾角送到控制校正器.每一发射器波前测量光可用不同的光源,不要求各转发器都相互相干.
图5中的控制校正系统是用来控制校正发射器中反射镜SM的2D倾角,控制信号来自跟踪器及WFS.跟踪器将目标反射回来的跟踪光λ2成像到CCD上,用跟踪算法得到目标的移动方向及角距离并将这两种信息提供给控制校正器,从而实现对目标的跟踪.目标跟踪器可安装到每个发射器或转发器上,具体安装位置还需要从系统的复杂度及工程化角度出发,做进一步深入研究.整个系统使用同一跟踪光源.跟踪光源的功率要求不小于100 W.
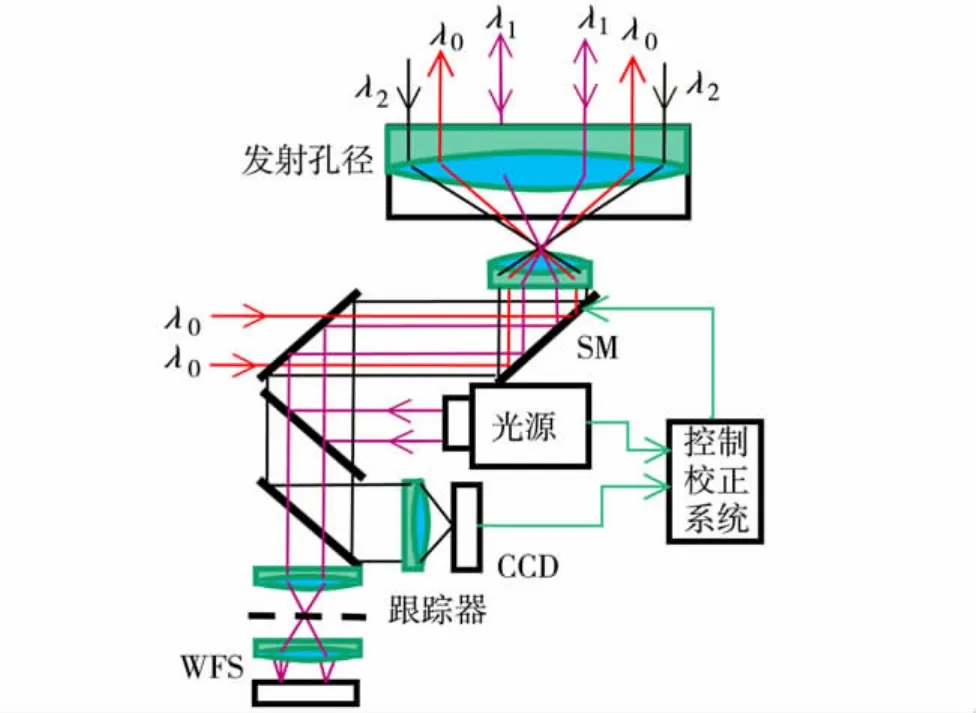
图5 发射器设计Fig.5 Transmitter design
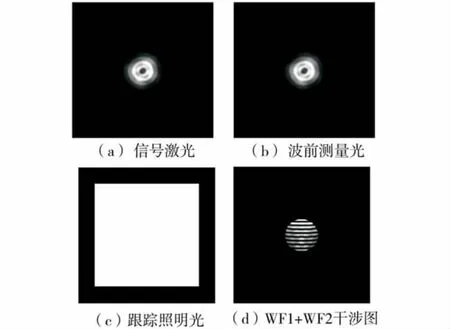
图6 湍流大气中斜程传输至目标的各激光Fig.6 Laser beams on target propagatingobliquely through turbulent atmosphere
我们对图5中的信号激光λ0、波前测量光λ1和跟踪照明光λ2在湍流大气中斜程传输情况进行了仿真,结果如图6.仿真中,设发射孔直径为20 cm,信号激光波长为1.06 μm,目标距离为10 km;采用4层相位屏处理方法,用Kolmogorov-Von Karman大气扰动功率谱描述折射率起伏,用Hufnagel-Valley 5/7湍流参数模型计算大气折射率结构常数.仿真涉及多参数设置,如目标俯仰角、各激光波长与出射孔径大小、相位屏分布方法 (线性分布或对数分布)、传感器噪声、背景噪声、光束控制参数及图像显示等.选择合适的过滤参数,可消除图6信号激光和波前测量光的biasing圆环现象.由图6可见,信号激光、波前测量光在目标上形成了亮点;跟踪照明光在目标上形成了亮区;两束信号激光在目标上产生了干涉条纹.仿真结果达到设计要求,表明该发射器设计方案可取.计算机仿真还可优化系统设计,为真实系统的参数选取提供依据.
傅里叶望远镜突破了传统成像概念,极大地提升了望远镜的分辨率,可能成为新一代光学望远镜的发展方向.本文设计的傅里叶望远镜发射器系统可满足对空间LEO目标的跟踪与干涉成像要求,有益于推动傅里叶望远镜的深入研究及工程化进程.
[1]Holmes R B,Ma S,Bhowmik A,等.透过扰动媒介成像的合成孔径技术分析与仿真[J].美国光学学会杂志A辑:光学、图像科学与视觉,1996,13(2):351-364.(英文版)
[2]Holmes R B,Brinkley T.傅里叶望远镜深空目标图像重建 [C]//数字图像恢复与合成Ⅳ会议论文集.贝灵厄姆 (美国):国际光学工程学会,1999,3815:11-22.(英文版)
[3]Gamiz V L,Holmes R B,Czyzak S R,等.GLINT项目纵览及其潜在的科学任务 [C]//图像技术与望远镜会议论文集.贝灵厄姆 (美国):国际光学工程学会,2000,4091:304-315.(英文版)
[4]Mandrosov V I,Camiz V I.附加高阶噪声的强不均匀大气中的高分辨傅里叶望远镜成像 [C]//学大气传播和自适应系统VII论文集.贝灵厄姆 (美国):国际光学工程学会,2004,5572:49-56.(英文版)
[5]Cuellar E L,Stapp J,Cooper J.傅里叶望远镜成像系统的实验室和外场试验验证 [C]//非传统成像会议论文集.圣地亚哥 (美国):国际光学工程学会,2005,5896:58960D-1-58960D-15.(英文版)
[6]Mathis J,Stapp J,Cuellar E L.傅里叶望远镜成像系统接收单元外场试验性能 [C]//非传统成像会议论文集.圣地亚哥 (美国):国际光学工程学会,2005,5896:58960F-1-58960F-12.(英文版)
[7]康美玲,杨春平,吴 健.基于傅里叶望远镜的不完全频谱图像的重建[C]//MIPPR 2009:自动目标识别与图像分析会议论文集.宜昌:国际光学工程学会,2009,7495:74954G-1-74954G-7.(英文版)
[8]刘欣悦,董 磊,王建立.稀疏采样傅里叶望远镜成像 [J].光学精密工程,2010,18(3):521-527
[9]Stapp J,Spivey B,Chen L,等.低地球轨道目标傅里叶望远镜成像仿真 [C]//非传统成像Ⅱ论文集.圣地亚哥 (美国):国际光学工程学,2006,6307:630701-1-630701-11.(英文版)
[10]Spivey B,Stapp J,Sandler D.用于快速运动目标的傅里叶望远镜相位闭合及目标重建算法 [C]//非传统成像Ⅱ论文集.圣地亚哥 (美国):国际光学工程学会,2006,6307:630702-1-630702-16.(英文版)
[11]Cuellar E L,Cooper J,Mathis J,等.多光束傅里叶望远镜成像系统的实验室验证 [C]//非传统成像Ⅳ论文集.圣地亚哥 (美国):国际光学工程学,2008,7094:70940G-1-70940-12.(英文版)
[12]陈宝刚,张景旭,杨 飞,等.傅里叶望远镜外场实验聚光镜子镜支撑模块的设计 [J].中国光学与应用光学,2009,2(4):329-333.
[1]Holmes R B,Ma S,Bhowmik A,Greninger C,et al.Analysis and simulation of a synthetic-aperture technique for imaging through a turbulent medium [J].Journal of the Optical Society of America A:Optics,Image Science,and Vision,1996,13(2):351-364.
[2]Holmes R B,Brinkley T.Reconstruction of images of deep space objects using Fourier telescopy[C]//Digital Image Recovery and Synthesis IV.Bellingham(USA):SPIE,1999,3815:11-22.
[3]Gamiz V L,Holmes R B,Czyzak S R,et al.GLINT program overview and potential science objectives[C]//Imaging Technology and Telescopes.Bellingham(USA):SPIE,2000,4091:304-315.
[4]Mandrosov V I,Camiz V I.High-resolution Fourier-telescopy imaging in strongly inhomogeneous atmosphere under high level of additive noises[C]//Optics in Atmospheric Propagation and Adaptive Systems VII.Bellingham(USA):SPIE,2004,5572:49-56.
[5]Cuellar E L,Stapp J,Cooper J.Laboratory and field experimental demonstration of a Fourier telescopy imaging system [C]// UnconventionalImaging.San Diego(USA):SPIE,2005,5896:58960D-1-58960D-15.
[6] Mathis J,Stapp J,Cuellar E Louis.Field experiment performance of the receiver elements for a Fourier telescopy imaging system [C]//Unconventional Imaging.San Diego(USA):SPIE,2005,5896:58960F-1-58960F-12.
[7]KANG Mei-ling,YANG Chun-ping,WU Jian.Reconstruction of uncompleted frequency spectrum images based on Fourier telescopy[C]//MIPPR 2009:Automatic Target Recognition and Image Analysis.Yichang:SPIE,2009,7495:74954G-1-74954G-7.
[8]LIU Xin-yue,DONG Lei,WANG Jian-li.Fourier telescopy imaging via sparse sampling[J].Optics and Precision Engineering,2010,18(3):521-527.(in Chinese)[9]Stapp J,Spivey B,Chen L,et al.Simulation of a Fourier telescopy imaging system for objects in low earth orbit[C]//Unconventional ImagingⅡ.San Diego(USA):SPIE,2006,6307:630701-1-630701-11.
[10]Spivey B,Stapp J,Sandler D.Phase closure and object reconstruction algorithm for Fourier Telescopy applied to fast-moving targets[C]//Unconventional ImagingⅡ.SanDiego(USA):SPIE,2006,6307:630702-1-630702-16.
[11]Cuellar E L,Cooper J,Mathis J,et al.Laboratory demonstration of a multiple beam Fourier telescopy imaging system [C]//UnconventionalImaging IV.San Diego(USA):SPIE,2008,7094:70940G-1-70940G-12.
[12] CHEN Bao-gang,ZHANG Jing-xu,YANG Fei,et al.Design of segment support module of collecting light mirror in Fourier telescope for field experiment[J].Chinese Journal of Optics and Applied Optics,2009,2(4):329-333.(in Chinese)
Design proposal of a Fourier telescopy transmitter for moving objects in low earth orbit†
LUO Xiu-juan,MA Cai-wen,ZHANG Yu,and SI Qing-dan
Xi'an Institute of Optics and Precision Mechanics Chinese Academy of Science Xi'an 710119 P.R.China
For the purpose of using high-resolution to detect and identify low earth orbit(LEO)moving space ob- jects,a proposal of the Fourier telescopy transmitter array disposition was presented,and a single transmitter was designed.The proposed transmitter system integrated the atmospheric aberration measurement system,the feedback control system,and the target tracking system.It used atmospheric turbulence wave-front correction and correlative tracking techniques to achieve accurate tracking of fast moving objects,simultaneously emitted multiple interference laser beams sweeping across the target to improve imaging speed,and carried out computer simulation on interference between laser beam pairs and laser propagation along slant paths through turbulence atmosphere.Theoretical analysis and simulation results show that the design from the proposal is reasonably feasible and meets the goal of the rapid LEO objects imaging on Fourier telescopy transmitter design.
Fourier telescopy;active imaging;laser;long-baseline interferometry;low earth orbit satellite;moving target tracking system;high spatial resolution;space exploration
TH 743;TN 249
A
1000-2618(2011)04-0325-05
2010-07-22;
2011-05-24
中国科学院知识创新工程试点项目 (o954961213)
罗秀娟 (1964-),女 (汉族),江西省南康市人,中国科学院研究员.E-mail:xj_luo@opt.ac.cn
Abstract:1000-2618(2011)04-0328-EA
† This work was supported by the Knowledge Inovation Project of Chinese Academy of Science(o954961213).
【中文责编:英 子;英文责编:卫 栋】
猜你喜欢
空气动力学学报(2020年1期)2020-11-29
数学物理学报(2019年2期)2019-05-10
兵器知识(2019年1期)2019-01-23
中国特种设备安全(2018年10期)2018-12-18
测控技术(2018年7期)2018-12-09
汽车维护与修理(2018年3期)2018-12-07
小猕猴智力画刊(2018年7期)2018-08-08
动漫星空(兴趣百科)(2017年9期)2017-10-30
舰船科学技术(2016年1期)2016-02-27
电测与仪表(2015年5期)2015-04-09