数控短电弧机床运动控制器硬件设计与实现
2011-04-23 03:39周建平宋祥龙梁楚华
河南农业大学学报 2011年2期
周建平,宋祥龙,许 燕,梁楚华
(新疆大学机械工程学院,新疆乌鲁木齐830008)
短电弧加工技术采用非接触式极间放电方式进行加工,加工效率高、工作噪音小,是一种专门用于硬面材料的高效加工技术[1].不同于电火花加工,在粗加工方式下加工轧辊外圆疲劳破坏层时(工件表面硬度HRC45)的最大单边切削深度可达28 mm,金属去除量可达900~1 200 g· min-1,被加工件表面影响层(马氏体组织)0.05~1 mm,其母材化学成分不变,加工噪音低于80 dB.短电弧加工技术可以有效地解决新型特种材料如钛合金、钼合金、不锈钢、高锰合金等特硬、超强、高韧性、高耐磨、冷作硬化等材料的加工难题.目前,短电弧机床的加工电源工艺参数设定和加工过程中的运动控制仍然采用人工进行实现,在加工过程中,工人操作强度较大,自动化程度低,并且工具电极在放电加工过程中自身也在损耗,工具损耗后如不进行补偿,则将造成被加工工件的尺寸精度降低[2~7].为进一步分析短电弧加工过程中的工具电极和工件电极之间放电电流与工具电极损耗的变化规律,找出合理的工作方式和刀具电极损耗的动态补偿方法,更好的控制被加工工件的加工精度和提高加工效率,本研究针对短电弧加工机床进行了专用运动控制器设计,进行了数控短电弧机床的运动控制器功能设计、硬件电路设计以及抗干扰设计等,以便为数控短电弧机床的研究提供依据.
1 运动控制器的功能要求
本研究中短电弧机床数控系统结构选用“NC嵌入PC”式的开放体系结构,即工业PC(IPC)+运动控制适配器卡的结构[2,3].控制器核心采用DSP控制专用芯片TMS320F2812(TI公司)完成数控加工中的伺服进给控制和实时数据采集操作;而上位主机(IPC)主要完成图形图像显示、G代码编辑及预处理、加工参数设定等实时要求不高的操作,并且实现对运动控制器运行参数获取与机床加工状态显示等功能.
运动控制器功能主要包括:(1)实现直线、圆弧等运动轨迹插补功能和运行状态的加减速控制;(2)实现工具电极的阴极上电装置的进给控制(轴交流伺服联动控制)和砂带磨工作台(UW轴交流伺服联动控制)进给控制,以及气液工作介质注入方向控制(B轴步进电机),均采用脉冲控制方式;(3)5轴(X轴,Z轴,U轴,W轴,B轴)位置状态检测功能,每轴检测位置包括2个极限位置点、2个减速位置点、1个回零位置点;(4)利用CAN总线实现主轴电机(阴极上电装置的工具刀盘旋转)、圆周进给电机(工件阳极的圆周进给)运动控制;(5)加工过程中的加工电流设定、工作电流检测、漏电流检测等功能;(6)利用16路输入、16路输出实现操作面板站的控制操作和状态指示;(7)运动控制器自身检测与状态指示;(8)与上位主机USB接口的通讯功能;(9)采用专用的电源管理芯片实时监测运动控制器的电压状态,实现了对数据掉电保护.
2 硬件结构的设计
为了进行短电弧机床的加工机理研究,除了实现数控机床的控制功能外,还需对加工过程中的工艺状态参数进行检测,所以在采集机床的信号时要满足系统实时处理的要求.运动控制器硬件结构核心采用DSP芯片(TMS320F2812)作为其主控芯片,DSP芯片通过USB芯片与主机通讯,CPLD芯片则实现DSP芯片与USB芯片通讯过程的逻辑粘合和部分I/O数字信号量控制(图1).
2.1 DSP控制芯片功能描述

图1 运动控制器结构框图Fig.1 Block diagram of motion controller
TMS320F2812是TI公司的一款专为用于控制的高性能、多功能、高性价比的32位定点DSP芯片[4~6].该芯片兼容 TMS320F2407 指令系统,最高可在150 MHz主频下工作,并带有18 k×16位0等待周期片上SARM和128 k×16位片上Flash,存取时间3 ns.其片上外设主要包括2×8路12位ADC(最快 80 ns转换时间),2 路 SCI,1 路 SPI,1路McBSP,1路eCAN等,并带有2个事件管理模块(EVA,EVB),分别包括 6路 PWM/CMP,2路QEP,3路CAP,2路16位定时器(或TxPWM/TxCMP).另外,该器件还有3个独立的32位CPU定时器,以及56个独立编程的GPIO引脚,可外扩到1 M×16位程序和数据存储器.TMS320F2812采用哈佛总线结构,具有密码保护机制,可进行双16×16乘加和32×32乘加操作,因而可兼顾控制和快速运算的双重功能.选用DSP芯片作为控制器的执行者,可以高速度实现数控系统的插补运算,并对加工过程中的参数进行实时检测,然后经过16位的D/A将数据送给短电弧机床加工电源.
2.2 USB 接口设计
计算机总线结构的发展过程中直接影响着数控系统的体系结构,目前新出现的1394总线(火线)、USB等串行总线的出现将极大地改变现有的计算机总线结构.USB通讯接口芯片选用Cypress公司的CY7C68013型芯片.USB总线的设备端点是数据不断取空和填满的FIFO,从USB角度看,端点就是充满了总线上接受和保持数据的缓冲区,USB从OUT端点缓冲区读主机发出的数据,向IN端点缓冲区写数据给主机.FX2 C68013-56芯片有SlaveFIFO和可编程接口GPIF 2种接口方式[7],在本系统中FX2工作在SlaveFIFO模式,这种方式下外部控制器可像普通FIFO一样对FX2的多层缓冲FIFO进行读写,FX2可以和CPLD直接通信而无需片内51内核的参与,FX2引脚与CPLD的信号连接如图2所示.
在由CPLD接入的控制信号中,SLOE表示输出使能,SLRD表示Slave读,SLWR表示Slave写,PKTEND表示数据包结束,CPLD可通过PKTEND管脚向USB发送1个IN数据包而不用考虑包的长度,FIFOADR[1∶0]用于选择与 FD[0..7],FD[8..15]相连的端点缓冲区,其值为00时选择端点EP2,为01时选择端点EP4,为10时选择端点EP6,为 11 时选择端点 EP8,FLAGA,FLAGB,FLAGC是FIFO标志管脚,用于映射FIFO的当前状态,FLAGA表示 EP2 FIFO PFULL(512 full),FLAGB表示 EP6 FIFO EMPTY,IFCLK是24 MHz的外部时钟,CLKOUT为CPLD内部时钟信号输入;这些标志及时钟信号在固件部分初始化函数中设置.FD[0..7],FD[8..15]是 16 位双向数据总线,用于在FX2和CPLD之间传输数据,PA0,PA1,PA7为8051核与CPLD通用I/O信号,WU2是在8051核处于挂起状态时USB唤醒信号.
2.3 CPLD逻辑通道粘合
运动控制器需要对5轴(X轴,Z轴,U轴,W轴,B轴)位置状态检测、上位主机通讯以及存储器译码等数字逻辑控制,其中位置状态检测中每根轴包括2个极限位置点,2个减速位置点,1个回零位置点.此时逻辑电路需要完成的功能比较多,如果采用分立的集成芯片来实现这些功能,势必会使得整个电路卡的布局结构变得复杂,可靠性降低,设计过程烦琐,设计的灵活性不高.而复杂可编程逻辑器件CPLD可以很好的克服这些缺点.CPLD不仅能满足片上系统设计的要求,而且具有系统内可再编程的独特特点,速度高、密度大、性能好,其应用广泛.
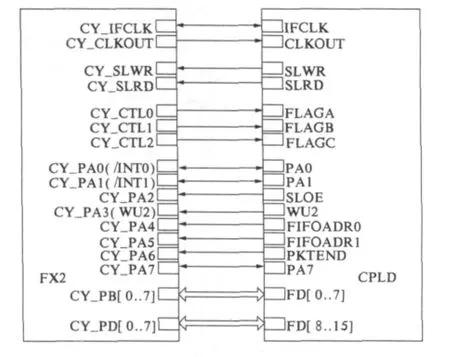
图2 FX2引脚与CPLD引脚的信号连接Fig.2 Signal connection between CPLD and FX2
可编成逻辑器件EPM7128SQC100芯片(ALTERA公司),采用100脚QFP封装则最大可以扩展84个I/O.该芯片在结构上包含逻辑阵列块(LAB)、宏单元、扩展乘积项、可编程连线阵列(PIA)和I/O控制块.在I/O控制块中有2个全局输出使能信号,允许把每个I/O管脚单独地配置为输入、输出和双向工作方式.所有I/O管脚都有1个三态缓冲器,缓冲器的控制端可以由全局输出使能信号控制,也可以把控制端直接连到地(GND)或电源(VCC)上.当控制端接地(GND)时,缓冲器输出为高阻状态,这时I/O管脚可作为专用输入管脚使用;当控制端接电源(VCC)时,可作为输出管脚使用.MAX 7128管脚到管脚最短延迟为5.0 ns.
CPLD芯片作为运动控制器的桥接芯片,实现与DSP TMS320F2812芯片、USB芯片、程序和数据存储器芯片的逻辑粘合.这里,CPLD完成USB主/从传输时序的逻辑构成与变换,并实现上位主机直接对主控芯片DSP操作以及数字I/O信号量得控制.
3 抗干扰设计
短电弧放电加工过程中,瞬时电流密度高,对电网中的负荷也较大,尤其在刀具切入加工时常常会引起电网的剧烈波动.这些扰动通过电路的阻抗、互感、分布电容耦合作用以及电磁波的辐射作用串入运动控制器单片机系统,破坏控制器的正常运行.这些干扰主要产生原因有:运动控制器电源回路的脉冲干扰主要是由于电弧放电负载投入和变压器负载切除时,交流电源上将引起较大的波动.由于电弧电流开关的通断、交流伺服电机的起停、工件主轴与刀具主轴变频器等原因,电网上常常会有数甚至数千伏的尖峰脉冲干扰,使得运动控制器的供电不正常,这种干扰对微机系统最为严重,据统计微机系统出现错误80%的可能来自电源;另一个主要干扰源就是来自于电弧放电时的电磁干扰,与周围的高压气泵、中频炉、可控硅逆变电源等发出的电磁干扰使微处理器不能正常工作[6~8].
为了尽可能地降低外界干扰对控制器的影响,控制器硬件设计时采取了以下的措施:(1)对数控系统的输入电源采用低通滤波器和共模电感,以隔离电网中的谐波成分;(2)将整个控制器采用屏蔽浮地方式,以减少共模干扰;(3)对控制器供电电源进行滤波处理,在带有负载的情况下,控制电源的纹波尽可能小;(4)每块电路板的电源输入端与地端都跨接100μF及0.1μF的电容以减少电源与数字地之间的高频耦合,每块芯片电源与地之间均跨接0.1μF的独石电容;(5)在TMS320F2812DSP芯片的PDPINT脚加上500 pF的小电容,避免辐射及传导干扰导致的DSP芯片误动作;(6)正确地处理“模拟地”与“数字地”.数字电路是非线性的,逻辑门的开关都会产生电流冲击,所以在数字地上高频扰动很强烈,因此数字地与模拟地不能有共同路径或者环路,只采用单点接地;(7)整个系统封闭在金属外壳内,金属外壳可靠接地,以防止电磁辐射的干扰.
在控制器固件设计时,可以采取以下的措施进行软件抗干扰设计:(1)使用“看门狗”(Watchdog)监视运行状态,能有效地防止系统在不可预测的干扰作用下产生的程序执行紊乱,即“程序跑飞”.TMS320F2812自带了1个内部看门狗,当DSP不能在规定的时间内将Watchdog复位,Watchdog将从内部触发RESET中断,将整个系统复位,从而使整个系统重新运行,避免了程序锁死.(2)设置软件陷阱与指令冗余.由于DSP芯片运行的步骤是由程序计数器(PC)值被改变,当CPU受到干扰后,PC值常被改变,从而将操作数作为指令码来执行,从而引起混乱甚至使系统陷入死循环.为了减小这种可能性,采取了设置软件陷阱及冗余指令的方法.在程序正确执行不能运行到的地址,如程序各模块间、未用的中断向量地址、EEPROM中未用的地址等地方,填入NOP指令,或者是复位指令.特别是在中断过程中、设置大量冗余指令和标志,以减少由外界输入信号干扰所引起的错误中断.
4 结语
本研究所设计数控短电弧机床运动控制器与通用数控机床运动控制卡相比,不仅需要满足数控加工过程中所需的直线、圆弧插补运动控制和加减速控制要求,还需要满足实验用短电弧加工机床所需要的加工电流设定、工作电流检测、漏电流检测等功能,控制器利用USB接口实现上位计算机与短电弧加工机床通讯,可通过联机调试实现加工过程中的运动控制与放电参数监测.目前试验用上位主机硬件平台采用带有USB2.0接口的IPC机,控制器还可以方便的移植到带有USB接口的ARM嵌入式计算机中,为控制器的实用化打下基础.
[1] ZHOU JP,LIANGCH,TENG WJ.Study on rules in material removal rate and surface quality of short electric arc machining process[J].Advanced Materials Research.2008,33(4):1313-1318.
[2] 周祖德,魏仁选,陈幼平.开放式控制系统现状、趋势及对策[J].中国机械工程,1999,10(10):1090-1093.
[3] 张 宏,李富平.基于PC+运动控制卡的开放式数控系统的研究[J].机械设计与制造,2008(6):171-173.
[4] 苏奎峰,吕 强.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[5] 潘建峰,范 剑,白建华.基于DSP核心控制器的开放式数控系统的研制[J].机械制造,2006,44(11):36-38.
[6] 刘庆刚,周传运.变频控制系统的干扰源分析及抗干扰措施[J].机床与液压,2009,37(6):251-253.
[7] 王守艳,姚河清,范兴辉,等.数字化TIG逆变焊机两种典型抗干扰设计[J].焊接学报,2007,28(12):73-76.
[8] 钟和清,邹云平,徐志新.DSP数字控制系统的电磁兼容设计[J].通信电源技术,2004,21(4):13-15.
猜你喜欢
数学物理学报(2022年2期)2022-04-26
智能建筑电气技术(2022年2期)2022-02-06
中学生数理化·教与学(2019年8期)2019-09-18
制造技术与机床(2019年9期)2019-09-10
电子制作(2017年22期)2017-02-02
制造业自动化(2016年8期)2016-09-12
电子产品可靠性与环境试验(2016年6期)2016-05-17
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
铁路通信信号工程技术(2014年6期)2014-02-28
电子测试(2013年22期)2013-09-26