
通讯网络中二维群体运动的一致性
2011-04-20 07:27许真铮王隔霞
上海电力大学学报 2011年4期
许真铮,王隔霞
(上海电力学院数理学院,上海 201300)
近年来,群体运动的研究受到广泛关注.文献[1]研究了在切换通讯网络连接方式下一维动力学个体的一致性;文献[2]和文献[3]研究了在固定通讯网络连接方式下一维动力学个体运动的稳定性.由于这些研究中个体的位置变量和速度变量均为一维情形,其结论不能推广到二维,因此笔者对通讯网络中二维群体运动的一致性问题进行了进一步的研究.
笔者将个体运动虚拟为二维的动力学行为,并考虑其在固定通讯网络连接下群体运动的一致性,同时考虑到外部环境对速度的反馈控制和相邻个体间的相互影响,发现二维群体运动的最终位置和速度的一致性与一维并不相同.在二维系统中,个体运动速度最终趋于零,且位置集中于某一点.
对动力学个体的群体运动研究有利于理解自然与社会中的复杂运动:一方面能更好地揭示自然秘密,理解社会经济活动的规律;另一方面,可促进其他领域科学的进步和发展,督促人们不断完善和发展新技术[4-6].因此,对其进行透彻详细的研究十分必要.
1 数学模型的建立
由M个二维动力学个体组成一类动态群体,个体与个体交流的通讯网络由一个无向图G= (V,A)表示[7-10],图中的顶点Pi代表群体的第i个个体,由于无向图中的边eij∈ε,说明个体Pi与个体Pj之间有信息交换.设这类群体中的个体Pi具有相同的动力学特征,用xi=(xi1,xi2)T∈R2表示个体Pi的位置状态,vi=(vi1,vi2)∈R2表示个体Pi的速度状态,则其动力学方程表示为:

文献[1]中,每个个体的位置和速度都是一维的,但在本文中将其看成二维,并作平面运动,也符合实际情况.虽然从式(1)来看与一维的形式一样,但由于反馈K中有了耦合项,其结果将与一维不同.
引理1具有M个顶点的无向图G连通时,有如下性质[3]:

定义如果常向量x0=(x01,x02)T∈R2,控制反馈K满足

多个个体形成的动力学系统的整体表示如下.
引理2 M个二维动力学个体按照式(1)的运动规律在图G=(V,A)连接下的动力学行为可表示为:

式中,φ=IM⊗(A+BK)-LG⊗BF,而LG是图G= (V,A)的Lapalicain矩阵.
证明由式(1)可知:

2 一致性的证明
针对式(2)中的矩阵φ我们有如下引理.
证明根据直积运算性质可得:

引理4当图G=(V,A)连通时,存在正交矩阵WG∈RM×M,使得(W-1G⊗I4)φ(WG⊗I4)为对角块矩阵.
证明因为该图是无向图,即aij=aji,从而矩阵LG为对称矩阵.
由引理1可知,rank(LG)=M-1,并且LG有特征值0=λ1<λ2≤λ3≤…≤λM.
由对称矩阵必可正交对角化知,存在这样的正交阵WG∈RM×M,使得:

证毕.
下面要说明对于上述连通图,存在公共的反馈K,使得(W-1G⊗I4)φ(WG⊗I4)为Hurwitz稳定.
引理5当反馈K同时满足k11+k22<0和k11k22-k21k12>0时,对于任意的连通图G=(V,A),矩阵(W-1G⊗I4)φ(WG⊗I4)的特征值除去两个一阶的零特征值之外全小于零.
证明由式(6)可知,当i=1时,


由引理5及相似矩阵特征值相同可知,φ的特征值也具备除去两个一阶的零特征值之外全小于零的性质.

证明根据上述性质,对于此反馈K有:设J是φ的Jordan块,则存在矩阵S∈R4M×4M,使



同理可计算出φ(WG⊗I4)S的前两列为04M×2,故(WG⊗I4)S的前两列可选为wrd,其中d为待定矩阵.

定理1表明,当个体的位置变量选为二维时,其最终位置不但与初始位置有关,而且与反馈有关.这与一维不同,在一维情形下,最终位置只与其初始位置有关,与反馈无关.
3 数值仿真
现在考虑由6个个体形成的二维切换网络拓扑结构,其个体相互间的关系如图1所示.


图1 二维网络下个体通讯交流的连接关系
群体运动的二维位置轨迹与速度轨迹如图2所示.

图2 群体运动的二维位置轨迹和二维速度轨迹
群体运动的二维位置分量1和位置分量2关于时间的变化轨迹见图3和图4.

图3 位置分量1关于时间的变化轨迹

图4 位置分量2关于时间的变化轨迹
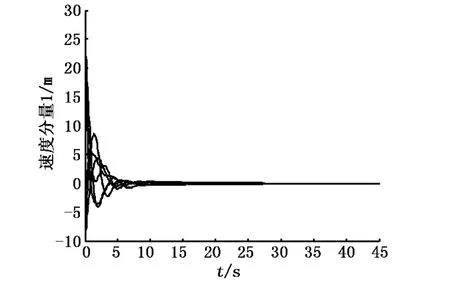
图5 速度分量1关于时间的变化轨迹
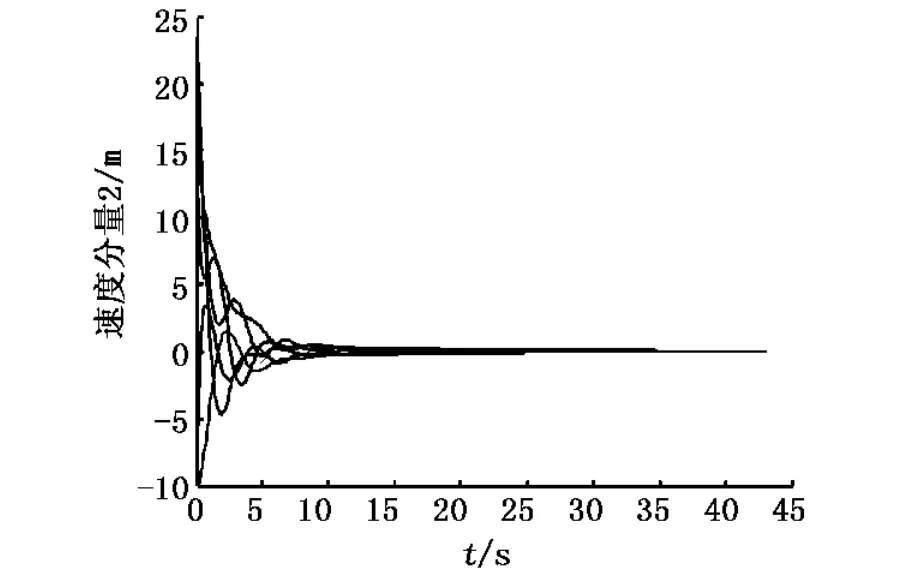
图6 速度分量2关于时间的变化轨迹
由推导后的公式可得:
比较后发现,计算数值与模拟所得的结果相一致.
4 结论
(1)群体行为在固定网络下具有一致性;
(2)大多数的二维动力学个体都符合动力学方程,其运动的速度为位移的导数,所受力的大小和方向由自身速度和邻居个体的速度对自身的反馈决定;
(3)二维动力学个体最终会达到速度趋于零,位置集中于某一点的状态.
[1]XIE G,WANG L.Consensus control for a classof networksof dynamic agents:Switching Topology[C]//Proceedings of the 2006 American Control Conference Minneapolis,2006: 1 382-1 387.
[2]XIE G,WANG L.Consensus control for a classof networksof dynamic agents:fixed Topology[C]//Proceedings of the44ThIEEE Conference on Decision and Control,2005:96-101.
[3]余宏旺.通讯网络下群体的动力学行为[M].上海:上海大学出版社,2008:12-23.
[4]BOABEAU E,DORIGOM,THERAULAZG.Swarm intelligence:from natural to artificial systems[M].Oxford:Oxford University Press,1999:53-94.
[5]KENNEDY J,EBERHARTR C,SHIY.Swarm intelligence[M].San Francisco:Morgan Kaufmann Publishers,2001: 24-75.
[6]楚天广,杨正东,邓魁英,等.群体动力学与协调控制研究中的若干问题[J].控制理论与应用,2010,27(1):86-93.
[7]REYNOLDSC.Flocks,birds and schools:a distributed behavioralmodel[J].Computer Graphics,1987(1):25-34.
[8]WANG L,XIE G.Consensus control for a class of networks of dynamic agents[J].Int.J.Robust Nonlinear Control,2007,17(10-11):941-959.
[9]MU S,CHU T,WANG L.Coordinated collectivemotion in a motile particle group with a leader[J].Physica A,2005(2-4):211-226.
[10]HONG Y,GAO L,CHENG D,et al.Lyapunov-based approach to multiagent systems with switching jointly connected interconnection[J].IEEE Trans.Autom.Control,2007,52 (5):943-948.
[11]HU J,HONG Y.Leader-following coordination ofmultiagent systemswith coupling time delays[J].Physica A,2007(2): 853-863.
[12]SABER RO,MURRAY R M.Consensus problems in networks of agents with switching topology and time-delays[J].IEEE Trans.Automat.Contr.,2004,49(9):1 520-1 533.
[13]GODSIL G,ROYLE G.Algebraic graph theory[M].New York:Springer-Verlag,2001:45-101.
(编辑苏娟)
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
公民与法治(2022年5期)2022-07-29
数学物理学报(2021年5期)2021-11-19
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中国科技信息(2016年19期)2016-10-25
燕山大学学报(2015年4期)2015-12-25
