
基于UWB技术的无线定位系统的研究与测试
2011-04-20 07:27孙锦中
上海电力大学学报 2011年4期
孙锦中
(上海电力学院计算机与信息工程学院,上海 200090)
近年来无线定位技术在军事和民用领域已获得了广泛的应用,如雷达和GPS等.超宽带(Ultra W ide Band,UWB)技术因其具有丰富的带宽在定位方面具有很大的优势,在理论上超宽带的定位精度可以达到厘米级,因此UWB技术在精确定位方面具有实际的应用前景.
1 UWB的定位方法
UWB技术是一种高速、低成本和低功耗的无线通信技术.它不用载波,而采用时间间隔极短(纳秒或纳秒级以下)的非正弦波窄脉冲进行通信,也称作脉冲无线电(Impulse Radio)、时域(Time Domain)或无载波(Carrier Free)通信.由于UWB系统的脉冲持续时间极短,具有较强的时间和空间分辨率,因此可以有效地对抗多径衰落,可以在测距、定位和跟踪方面实现很高的精度,在无线定位中具有突出的特点和优势[1].
UWB定位技术属于无线定位技术的一种,其定位原理按其测量参数的不同,可分为基于接收信号强度法、基于接收信号角度法和基于接收信号时间法3种.基于接收信号强度的定位方法是利用接收信号强度与待测目标至接收基站距离成反比的关系,通过测出接收信号的场强值、已知的信道衰落模型和发射信号的场强值估算出收发信号机之间的距离,根据多个距离值即能估计出待测目标的位置.基于接收信号角度的定位方法就是通过信号到达的方向来确定信号的位置.这种定位技术一般利用两个或多个参考结点,通过测量接收信号的到达方向来估计目标结点的位置.基于接收信号时间的定位技术依赖节点间信号传输时间的测量,如果两个节点共用一个时钟,则接收信号的结点可以通过参考节点的时间信息来确定接收信号的到达时间.对于一个单路径的加性高斯白噪声(AWGN)信道来说,基于接收信号时间的技术是非常适合于UWB无线定位系统的,这主要归功于其非常宽的带宽[2].
2 UWB定位系统的构建
一个典型的UWB定位系统主要包含3个部分,即:电池供电的活动标签(Tag),能够发射UWB信号来确定位置;位置固定的传感器(Sensor),能够接收并估算从标签发送过来的信号;综合所有位置信息的软件平台(Software Platform),能够获取、分析并传输信息给用户和其他相关信息系统.
在该系统中,标签发射极短的UWB脉冲信号,传感器接收此信号,并根据脉冲到达的时间差分和脉冲到达的角度计算出标签的精确位置.由于采用了UWB技术,加上传感器内部有一个UWB接收器阵列,从而在定位计算时可以得到高精度的角度坐标,以确保较高的定位精度和室内应用的可靠性.传感器通常按照蜂窝单元的形式进行组织,附加的传感器可以根据其几何覆盖区域进行增加.在每个定位单元中,主传感器配合其他传感器工作,并与单元内所有检测到位置的标签进行通讯.通过类似于移动通讯网络的蜂窝单元组合,能够做到较大面积区域的覆盖.同时,传感器也支持双向的标准射频通讯,允许动态改变标签的更新率,使交互式应用成为可能.通过标准以太网线或无线局域网,可以将标签位置发送到定位引擎软件.定位引擎软件将数据进行综合,并通过API接口传输到外部程序或定位平台软件,实现空间信息的可视化处理[3,4].
3 UWB定位系统实例测试及分析
为了验证UWB定位系统的可靠性与精确度,笔者建立了实际的UWB无线定位系统进行实验与测试.
实验中的UWB无线定位系统采用了英国Ubisense公司提供的标签(Ubisense Tag)和传感器(Ubisense Sensor),在实验室中建立实际的测试环境.该测试房间为14.71 m×8.72 m×4 m,为了便于进行实验数据的分析和处理,我们将房间分隔成长宽各为1 m的方格,并对房间建立坐标系.
定位场景的空间坐标系如图1所示.

图1 定位场景的空间坐标系
位于4个角落的4个Sensor的坐标分别为:主Sensor为0.10,0.12,2.14;Sensor 1为6.21,0,2.14;Sensor 2为0.16,13.28,2.12;Sensor 3为5.93,13.29,2.12.
3.1 静态定位测试
在静态定位测试中,将移动标签依次放在房间内预先划定的各方格的顶点,然后分别对每个点进行数据采集,根据采集的数据测出各点的位置坐标,画出测试点在房间内的分布图,再用测得的各点坐标与真实坐标相比较,计算出误差,以此评估定位系统的精确度和可靠性.
实验中,对每个点采集50个数据,根据测试数据绘出各点的分布图如图2所示.
观察4个Sensor情况下点的分布情况可以发现,最边缘的Y=1区域与Y=13区域的点呈现无规律的发散状态,此时点的精度已经不能保证,因此在分析数据时,取有代表性的Y=6这一区域来进行分析,其静态测试数据如表1所示.

图2 静态测试点分布
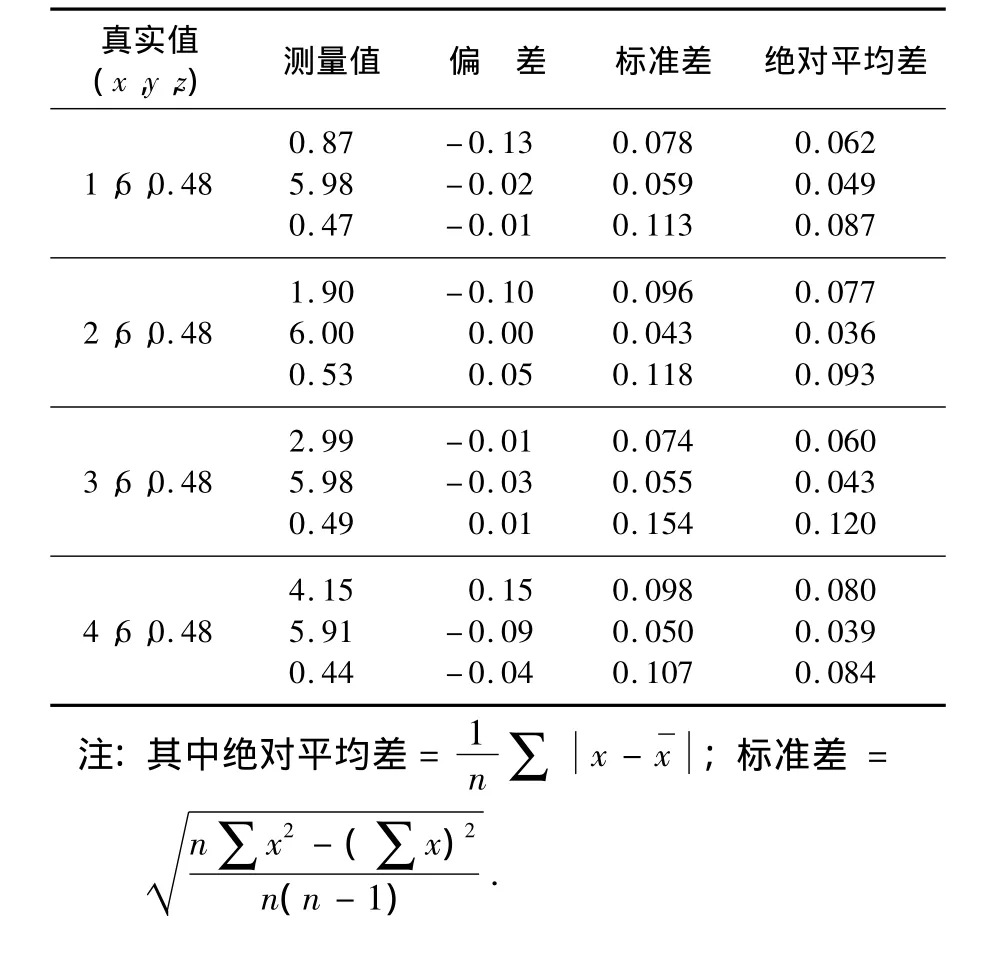
表1 静态测试数据记录(Y=6)/m
由表1可知:
(1)除了边缘区域外,所有的Y坐标的精度都在0.05 m以内;
(2)除了边缘区域外,所有的X坐标的精度都在0.1 m以内;
(3)用4个Sensor并不能提高静止点的X和Y坐标值,但是对于Z的提高有帮助;
(4)在使用4个Sensor的情况下,定位精度是最理想的,同时也能很好地保证信号的覆盖效果,但是从图2也可以看出,在测试区域的边缘仍然会出现采集到的测试数据精度太差以至于无法准确绘出测试点位置的情况,因此需要舍弃边缘区域的测试数据,选用靠近中心区域的测试数据,以获得理想的测试结果.
3.2 动态定位测试
在动态测试中,先设定好移动标签的运动轨迹,如图3所示,让移动标签沿此轨迹运动,然后再根据传感器测得的定位数据画出标签的运动轨迹,将两个轨迹相比较,分析动态定位的可靠性与精确度.

图3 动态测试运动轨迹设定
对移动标签的定位数据进行分析,可得到移动标签的定位轨迹,如图4所示.

图4 动态测试运动点分布
由图4可知,中间折线的交点基本在(3,7)点处,而且很明显的上半三角形比下半三角形要大,同时两条横向直线段的纵坐标基本在4与10处,这与预先设定的运动轨迹吻合.如果应用一些异常规则将异常点去除后,可以得到更精确的运动轨迹图.此外,当物体运行到X=6处转弯时,点的分布呈现集体异常情况.这是因为测试时将标签放在人的外面口袋,转弯时有一个较大的幅度,所以会出现这样的结果.
4 结语
信号的距离分辨力与信号的带宽成正比.由于超宽带信号的超宽频带特性,使得UWB系统的距离分辨精度是其他系统的几百甚至上千倍.UWB信号脉冲宽度为纳秒级,其对应的距离分辨率可达到厘米级,这是其他窄带系统无法比拟的.较高的距离分辨精度也使得超宽带系统在完成通信的同时,还能实现准确的定位和跟踪,定位与通信功能的融合也扩展了超宽带系统的应用范围.通过对UWB定位系统进行室内静态定位和动态定位测试可以看出,采用超宽带无线电很容易实现室内的精确定位,又因为其具有低功耗、抗干扰强的特点,所以在无线定位方面,UWB技术有着广阔的应用前景.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
科学与财富(2018年30期)2018-12-28
雷达学报(2018年3期)2018-07-18
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
计算机应用(2016年9期)2016-11-01
