
基于Matlab的平面正弦连杆机构动力学分析
2011-03-26 07:32:36王锡霖许文艺严日明
长春工业大学学报 2011年1期
王锡霖, 李 举, 许文艺, 严日明
(中国地质大学(武汉)机械与电子信息学院,湖北武汉 430074)
0 引 言
在机械运动过程中,作用在机械上的力有驱动力、生产阻力、重力、摩擦力、惯性力以及运动副中的反力等。作用在机械上的力不仅是影响机械运动和动力性能的重要参数,而且也是决定强度设计、结构设计的重要因素,所以在设计新机械的过程中,或者为了更合理使用现有机械,都必须对机械进行受力情况的分析。受力分析的目的是确定运动副中的反力以及为使机械按照规定规律运动所需的平衡力或平衡力偶。文中以平面正弦连杆机构为例,对用解析法进行受力的数学分析过程进行了介绍,并且阐述了使用Matlab编程求解方法[1]。
1 平面正弦连杆机构的数学模型
正弦机构如图1所示。
正弦机构中(常数)

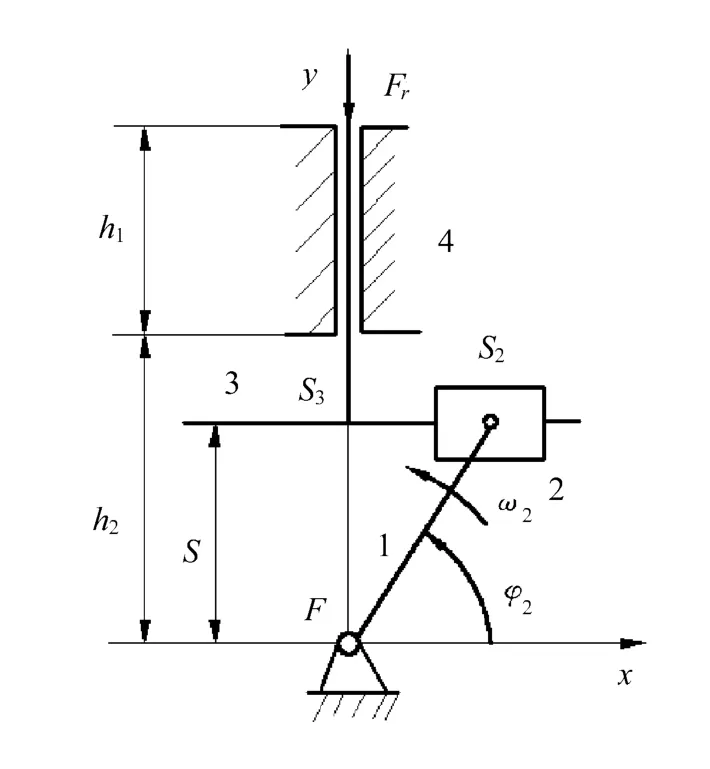
图1 正弦机构
滑块2和构件3的重量分别为
质心S2和S3的位置见图1,加于构件3上的生产阻力为
构件1的重力和惯性力略去不计。需要加在曲柄1上的平衡力偶Mb未知。
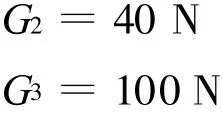
分别对3个构件进行受力分析,如图2~图4所示[2-4]。
图2 构件3受力图

图3 构件2受力图

图4 构件1受力图
1.1 滑块2

构件3:
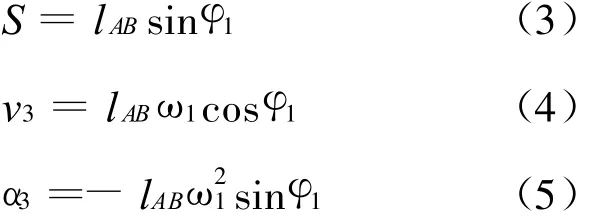
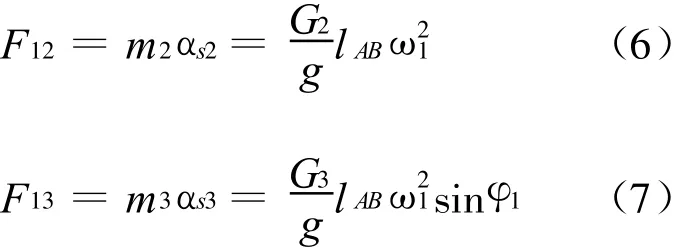
1.2 确定惯性力
1.3 各构件的平衡方程
构件3:

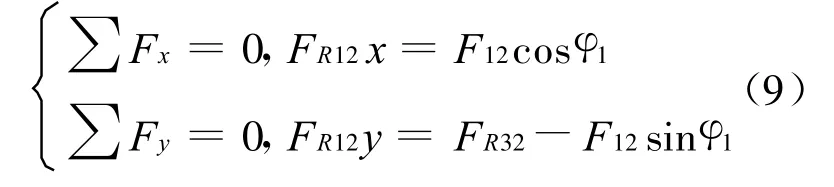
构件2:
构件1:
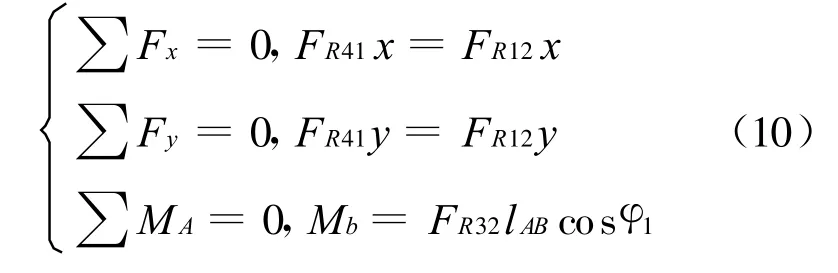
式(8)~式(10)中总共有8个方程,8个未知数。归纳出一元八次方程矩阵:

AX=B进而可得:

接下来运用Matlab软件工具进行分析。
2 M atlab编程
编写如下名为F的M函数[5-7]:
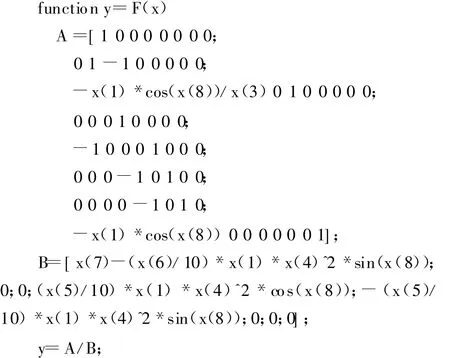
接下来取 φ1=0°~360°范围,分析其受力的变化规律,在M atlab命令中运行如下命令:
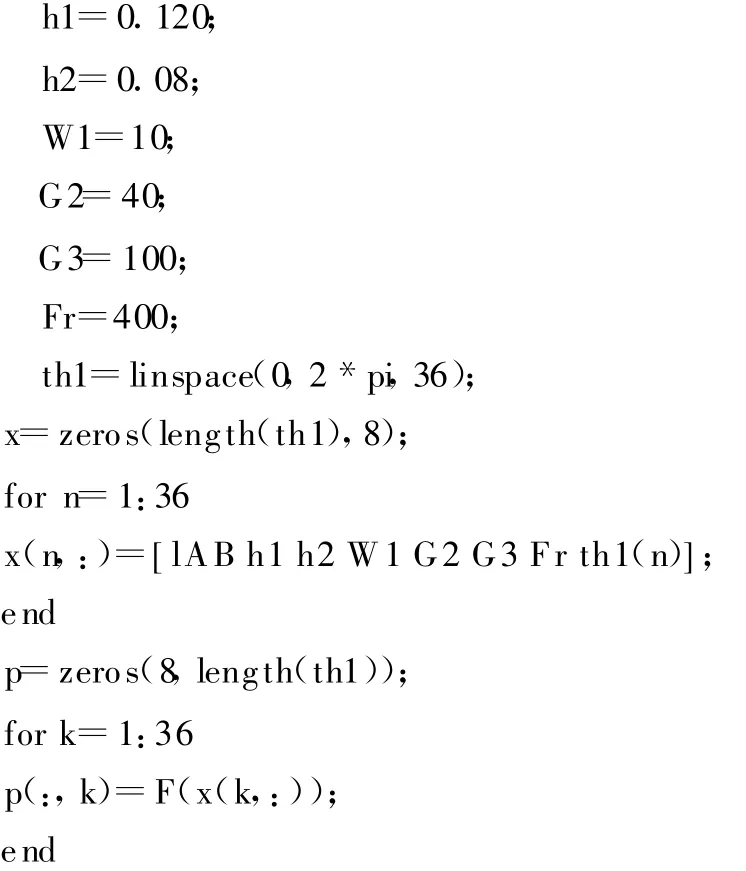
得到的P矩阵的每一行分别是8个未知量在φ1等于36个分量下的值。
3 输出图像
按照上述分析结果输出图像[8],输出力FR23和FR32的变化规律图像,程序如下:
结果如图5所示。
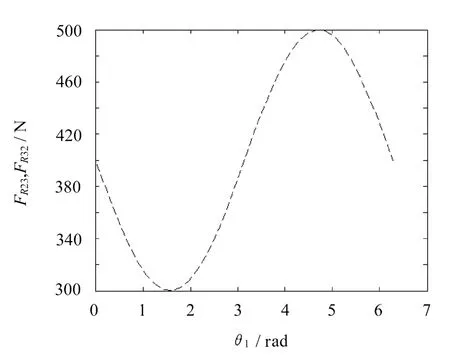
图5 输出结果
同样利用相同的方法可以得到力FR4和的变化规律图像,如图6所示。

图6 FR4和的变化规律
力FR12 x的变化规律图像如图7所示。
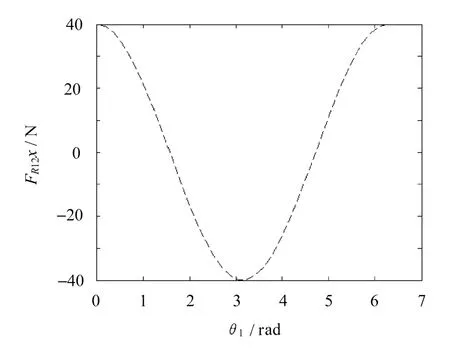
图7 FR12 x的变化规律
力FR12 y的变化规律如图8所示。
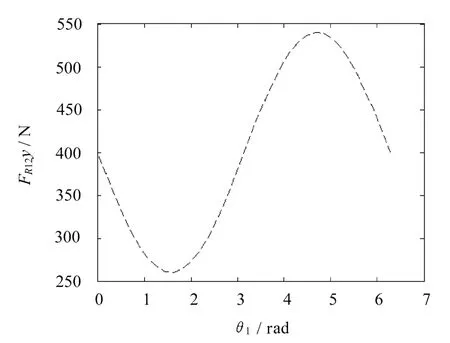
图8 FR12 y的变化规律
力FR41y的变化规律如图9所示。

图9 FR41 y的变化规律
所需平衡力偶Mb的变化规律如图10所示。
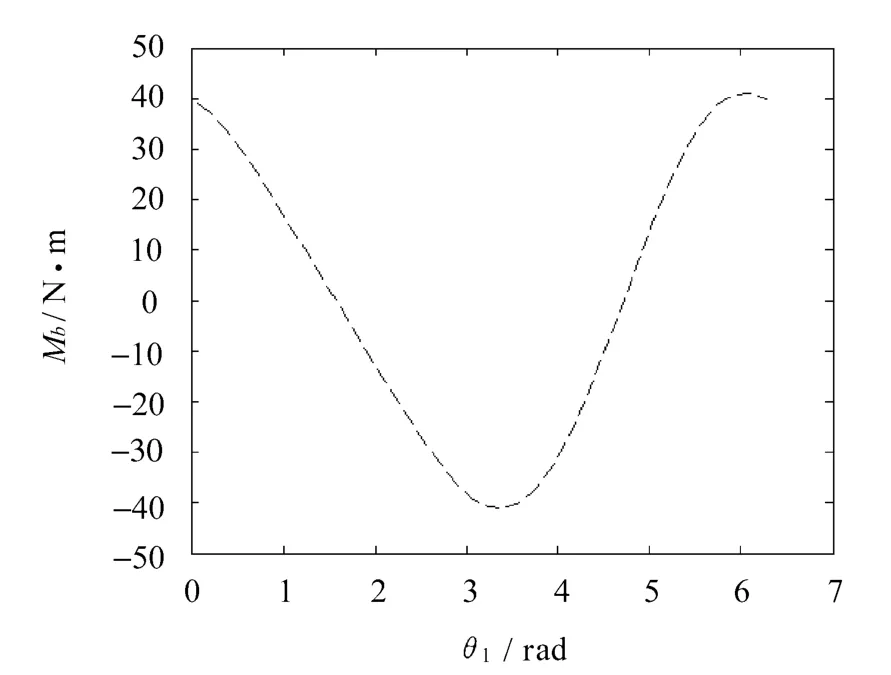
图10 平衡力偶Mb的变化规律
4 结 语
对平面正弦连杆机构进行动力分析,并且依据其数学模型运用M atlab编程绘制出了曲柄在连续360°的运动过程中各个运动副变化规律及平衡力偶的变化规律曲线图,使得设计过程中力与位置的关系直观易懂,对实际设计有一定指导意义。
[1] 孙恒,陈作模.机械原理[M].7版.北京:高等教育出版社,2006.
[2] 雷培,刘云霞.基于M ATLAB的四连杆机构运动分析[J].机械工程与自动化,2009(4):74-76.
[3] 李团结,贾建援,胡雪梅.机械工程中两类非线性方程组的完全解[J].西安电子科技大学学报:自然科学版,2005,32(1):78-82.
[4] 郭仁生.机械工程设计分析和MATLAB应用[M].北京:机械工业出版社,2008.
[5] 高会生,李新叶,胡志奇.MATLAB原理与工程应用[M].2版.北京:电子工业出版社,2006.
[6] 曲秀全.基于MATLAB/Simulink平面连杆机构的动态仿真[M].哈尔滨:哈尔滨工业大学出版社,2007.
[7] 同济大学数学系.线性代数[M].北京:高等教育出版社,2009.
[8] 周品,何正风.MATLAB数值分析[M].北京:机械工业出版社,2009.
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
锻压装备与制造技术(2021年2期)2021-07-19 08:50:46
中学物理·高中(2019年8期)2019-09-20 07:08:06
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
中学生数理化·八年级物理人教版(2018年5期)2018-06-21 08:01:38
中学生数理化·高一版(2016年10期)2016-03-01 03:45:54
电测与仪表(2015年16期)2015-04-12 00:44:26
火炸药学报(2014年3期)2014-03-20 13:17:44
物理与工程(2014年5期)2014-02-27 11:23:19
