
基于LOFAR谱图的水下目标识别方法
2011-03-24 13:42宋振宇丁勇鹏赵秀丽
海军航空大学学报 2011年3期
宋振宇,丁勇鹏,赵秀丽,翁 璐
(1.海军航空工程学院 a.科研部,b.兵器科学与技术系,山东 烟台 264001;2.92074部队,浙江 宁波 315021;3.海军装备部军械保障部,北京 100841)
0 引言
LOFAR(Low Frequency Analysis Recording),即低频分析与记录。LOFAR谱图,就是根据噪声的局部平稳特性对噪声信号作连续时域采样,并进行短时傅里叶变换获得的时变功率谱在时间、频率平面上投影形成三维立体图[1]。基于LOFAR谱图的水下目标识别方法步骤:首先,需要获得目标噪声信号的LOFAR谱图;然后,在此基础上进行特征量提取和特征主成分分析,得出一组精简的并最能反映原始噪声特性的特征向量;最后,通过分类器对这组特征向量进行分类以达到目标识别的目的。
1 目标噪声信号LOFAR谱图的获取
基于LOFAR谱图的水下目标识别方法的第一步是获取辐射噪声信号的LOFAR谱图。由于水中目标辐射噪声信号具有非平稳性,其信号特征随时间发生比较明显的变化,因而LOFAR谱图的获取不能运用基本傅里叶变换,而应当用短时傅里叶变换(STFT)。
傅里叶变换是频域分析的基本工具,它是一种全局变化,无法得到信号的频域局部性质。为了得到信号的频域局部特性,一个简单而又直观的方法就是在基本傅里叶变换函数之前乘上一个时间宽度很短的窗函数w(t),再将这个窗函数沿着时间轴移动,得到噪声信号 s (t)的短时傅里叶变换。其中,w(t)起时限作用,而 e−jωt起频限作用,二者一起实现时频双限制,其基本变换式为

式中:w(t)为时间窗函数;s (t)为当前被分析的信号。随着τ的变化,w(t)所确定的“时间窗”在时间轴上移动,使得s (t)依次进入被分析状态。
获得LOFAR谱图的具体步骤如下[2]。
1)将原始信号的采样序列分成连续的若干帧(假设为M 帧),每帧N个采样点。根据具体情况,帧间可有部分重叠,例如重叠40%。
2)对每帧信号样本 Lk(n)(1≤k≤M)作归一化和中心化处理,归一化处理的目的是使接收信号的幅度(或方差)保持在0和1之间;中心化处理是为了使样本的均值为零。
3)对信号 xk(n)作基本傅里叶变换得到信号 s (t)在第k 帧的LOFAR谱图Xk(ω)=FFT [xk(n)]。
2 基于LOFAR谱图的特征向量提取
得到LOFAR谱图后,从谱图中提取有效的分类信息,构成特征向量。
1)归一化LOFAR谱图,选取4个观察平面:S1(1/8)、S2(1/4)、S3(1/2)、S4(2/3),取每个平面与LOFAR谱图的交点集 P (ω),

2)将待分析样本信号的整个频率范围分段(如分为1 000段),通常的做法是平均划分每一段,但是考虑到潜艇的噪声信号频率一般都集中在5 kHz以下的低频范围内,为了更好地反映有用信号的特征,可以采用有区别的分段划分方法,即在有用信号的频段内多划分,对其他频段少划分。为此,可在5 kHz以下的频段内划分700段,其他频段划分300段。
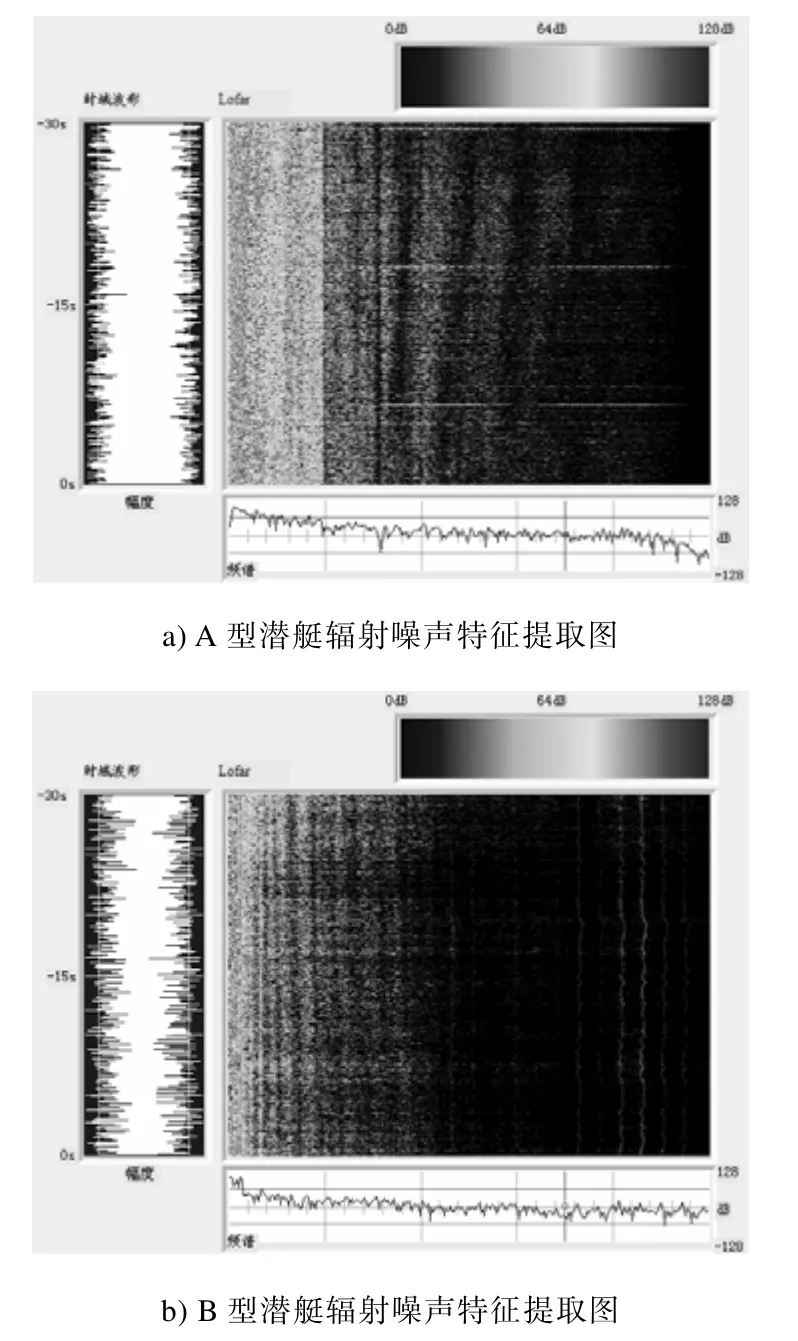
图1 某A、B两型潜艇辐射噪声特征提取图
3 特征向量主成分分析
经过特征提取后的噪声信号维数仍很高(本例中为1 000 维),虽然它能较准确地反映原始噪声信号的特征,但由于维数过高,给后续的处理带来困难。因此,需对这种高维的特征向量做某种特定分析,使其既能降低维数,又能较完整地保持原有特性,即引入主成分分析的方法(Principal components analysis,PCA),该方法是统计学中分析数据的一种有效方法,它通过线性变换把数据变换到一个新的坐标系统中,使得任何数据投影的第一大方差在第一个坐标(称为第一主成分)上,第二大方差在第二个坐标(第二主成分)上,依次类推。主成分分析经常用来减少数据集的维数,同时又保持数据集中对方差贡献最大的特征。[3]
用主成分分析方法提取特征向量主成分的具体算法如下。
设x是p 维随机变量,n为变量个数,得到原始矩阵X为:
1)对矩阵X 作标准化处理。
即对每一个分量作标准化变换,变换公式为

标准化后的数据矩阵Y为

2)计算相关矩阵R。
相关矩阵中的每一个元素由相应的相关系数表示:

3)求特征值和特征向量。
将特征值按降序排列为:λ1≥ λ2≥ … ≥ λm≥0。
4)求主成分。
根据求得的m个特征向量 βi(i=1,2,…,m),可得m个主成分为

式中:iB为由前i个特征向量iβ 构成的特征向量矩阵;Y为原始矩阵经过标准化处理后得到的标准化矩阵。
图2为按照上述算法利用Matlab仿真工具对LOFAR谱图特征向量进行仿真,将1 000 维的特征向量经过主成分分析后降低至50 维。
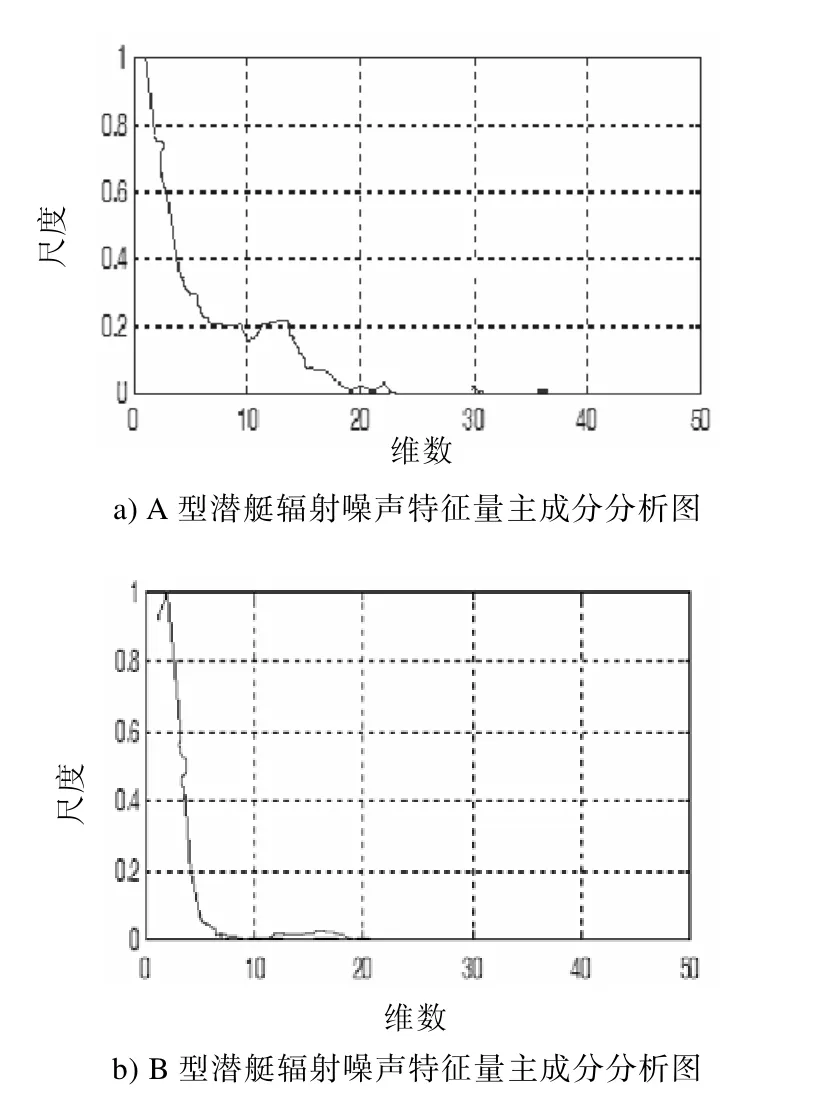
图2 某A、B两型潜艇辐射噪声特征量主成分分析图
4 水中目标的分类识别
4.1 分类器的选择
目标识别过程是一个模式分类的过程,由分类器来实现。目前使用较多的分类器主要有基于统计模式的分类器、基于模糊判断的分类器和基于人工神经网络的分类器,考虑到各种分类器的利弊,基于神经网络的分类方法非常适合于处理掺杂了大量非平稳背景噪声的信号分类问题,本文选用神经网络分类器对提取的潜艇辐射噪声LOFAR谱图的特征量进行分类。[4-5]
4.2 水中目标辐射噪声的分类仿真
神经网络分类器对目标的识别是按照对知识的存储和回忆来实现的。通过对样本的学习,建立起目标特征与实现对目标类别的某种对应关系,并记下不同层神经元之间的连接权值,实现对知识的存储;当识别目标时,通过回忆,寻找与其最为接近的类别,实现目标分类。
BP神经网络(Back-Propagation)是一种采用误差反向传播进行有监督学习的前馈多层神经元网络,BP网络应用非常广泛,但它具有两个明显的缺点:收敛速度慢,易陷入局部极值点[6]。通过在权系数调整公式中作一些改进,如变步长因子计算和附加动量法,以加快网络的收敛速度;在网络学习过程中,给权系数加入噪声干扰或采用遗传算法等,以避免网络陷入局部极值点(详见文献[7-10])。
本仿真实验采用改进的BP神经网络分类器对水中目标辐射噪声进行分类识别。根据作战需求、类型和工况等因素的不同,将水中目标划分为Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ5个大类,每个大类中包含数千个样本。为了验证基于LOFAR谱图的主成分分析的效果,首先,需要训练神经网络分类器,因此分别从每个大类中选取100个样本(共500个)作为训练样本,利用训练样本的LOFAR谱图特征向量对分类器进行训练;然后,再从5 大类中分别选取120个样本(共600个)作为测试样本,分别对未经主成分分析的LOFAR谱图特征向量和经过主成分分析的特征向量进行分类识别验证,得到的分类识别结果如表1、2所示。

表1 LOFAR谱图特征向量分类识别率/%

表2 主成分分析后特征向量分类识别率/%
4.3 结果分析
通过采用改进的BP神经网络分类器对水中目标辐射噪声进行分类识别试验,仿真实验结果表明:
1)基于LOFAR谱图的特征提取方法效果显著。从表1可以看出,目标辐射噪声的LOFAR谱图特征向量分类识别率已经较高,训练样本和测试样本的识别率平均值分别达到84.82%和80.64%。
2)主成分分析法对LOFAR谱图特征向量进一步优化。在经过主成分提取之后,去除了特征向量各成分之间的相关性,有效降低了特征向量的维数,使得分类识别率进一步提高。从表2可以看出,训练样本和测试样本识别率分别提高了 2.77%和5.06%。
[1]嵇绍岭.水下目标辐射噪声的特征提取技术研究[D].上海:上海交通大学,2002.
[2]嵇绍岭,丛丰裕,贾鹏,等.水下目标信号的Lofar谱图特征的主分量分析研究[J].数据采集与处理,2003,18(2):25-26.
[3]焦李成.神经网络的应用与实现[M].西安:西安电子科技大学出版社,1995:37-96.
[4]吕永林.声目标识别技术[J].楚雄师范学院学报,2008,23(3):56-58.
[5]马梅真.水下目标识别技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[6]李海英.水下被动目标识别技术研究[D].西安:西北工业大学,2001.
[7]李孝安,康继昌,蔡小斌,等.进化神经网络研究[J].控制与决策,2008,13(6):471-472.
[8]蔡悦斌,黄采金,史习智.动态神经元模型在水下目标识别中的应用[J].模式识别与人工智能,1998,11(2):199-205.
[9]叶东毅,何萧玲.前馈神经网络的一个改进的BP 学习算法[J].福州大学学报,1998,26(2):369-370.
[10]刘永红.神经网络理论的发展与前沿问题[J].信息与控制,1999,28(1):31-46.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
计算机系统应用(2021年2期)2021-02-23
电子技术与软件工程(2019年18期)2019-11-18
数学大世界(2019年7期)2019-05-28
劳动保护(2019年3期)2019-05-16
电子技术与软件工程(2017年14期)2017-09-08
航天返回与遥感(2014年5期)2014-07-31
客车技术与研究(2014年6期)2014-02-28
