
基于差异性测度的遥感自适应分类器选择
2017-09-08 06:54:08李光丽王玮哲姚乐乐李霖马天舒
电子技术与软件工程 2017年14期
文/李光丽 王玮哲 姚乐乐 李霖 马天舒
基于差异性测度的遥感自适应分类器选择
文/李光丽 王玮哲 姚乐乐 李霖 马天舒
遥感影像分类在遥感专题信息提取、动态变化监测等应用中都发挥着重要作用。现阶段遥感分类器与分类方法很多,造成了遥感分类结果的差异性或多样性,多分类器组合已成为提高遥感分类精度有效的途径。但并非所有的分类器组合都能提高分类精度,如何选择合适的分类器组合非常重要。通过构建基于差异性测度的启发式搜索算法,实现分类器成员的自适应选择,选用AVIRIS数据进行试验,结果表明,基于差异性测度的启发式搜索有助于选择分类器组合,从而提高遥感分类精度。
差异性测度 遥感分类器 精度
1 引言
遥感影像分类就是对地球表面及其环境在遥感图像上的信息进行识别和分类,从而达到识别图像信息所对应的实际地物,提取所需地物信息的目的。对于特定的遥感影像土地覆盖分类,常用的遥感分类器包括最大似然分类器,最小距离分类器,马氏距离分类器,平行六面体分类器,支持向量机分类器和神经网络分类器等。但是,每一种遥感分类器都有其自身的优势和局限性,其精度和适用范围也有一定限度。多分类器系统指的是利用多个分类器进行分类,然后通过一定的组合机制把多个分类器的结果进行融合,达到对目标进行识别的目的。一个好的多分类器系统不仅取决于组合规则,而且取决于分类器成员选择的好坏。因而希望找到一种方法来度量多分类器系统中成员分类器之间的关系,用于预测它们之间相互结合的能力,并且通过这种预测能力对多分类器系统的设计进行指导,从而提高组合分类器用于遥感影像分类的精度。本文应用基于启发式搜索的分类器选择方法,通过自适应的自动搜索选择合适的分类器组合,试验表明,该方法对于提高遥感分类精度具有一定指导意义。
2 多分类器组合原理
多分类器组合方式最突出的优点是模型可以综合不同分类器所得到的分类信息,避免单一分类器可能存在的片面性,以达到更好的分类效果。一般化的组合多分类器模型如图1所示。

图1:组合多分类器模型
如果把组合多分类器看作一个完整系统,则它由系统输入、分类器设计、融合机制和输出四部分组成。其中分类器的选择非常重要,并不是所有的分类器进行组合就一定能够提高分类精度,通常情况我们选择那些差异性较大的分类器构成分类器集合,从而使各分类器之间达到互补的效果,最终提高组合分类精度。其次,我们还要考虑用于组合的分类器的数量,过多和过少都不一定能符合实际需求。
3 基于启发式搜索算法的分类器集成
启发式搜索方法在诊断、智能规划、自动推理等人工智能领域应用广泛。启发式算法是指在可接受的运算时间、占用空间等开销的前提下,给出待解决的组合优化问题的一个可行解。
启发式搜索是在状态空间的搜索对每一个搜索位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。启发式搜索能够避免盲目搜索的效率低、运算时间和空间耗费过多的缺点。在启发式搜索中,对位置的评估函数很重要。采用不同的评估函数可以有不同的效果。评估函数的一般表达式为:
f(n)=g(n)+h(n) (1)
其中f(n)是节点n的评估函数,g(n)是状态空间中初始节点到n节点的最短路径长度估计,h(n) 是从n到目标节点最佳路径的估计代价,体现了搜索的启发信息,当选择合适的h(n) 作为启发因子时,可以很好的提高搜索效率。
基于差异性测度的启发式搜索算法构建多分类器系统,步骤如下:
(1)利用划分不同特征,不同的样本集输入各分类器;
(2)选用合适的差异性测度方法作为启发式搜索的结点;

图2:AVIRIS影像假彩色合成图像

(a)集合{2,5,6,11,12}
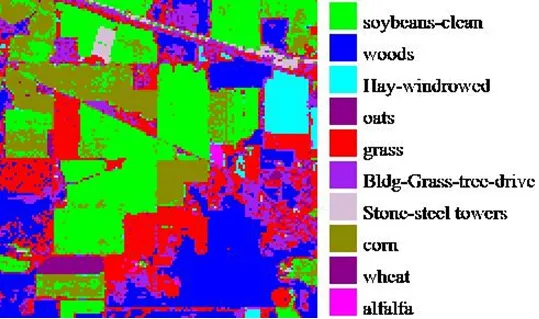
图3:AVIRIS影像多分类器组合分类图
(3)选择合适的分类器组合策略进行多分类器组合;
(4)通过启发式搜索选出最优成员分类器集合,组合后评定精度。
4 试验结果与分析
本文中的启发式搜索是基于DF差异性测度的,分类器组合策略为加权投票法。首先通过ENVI4.5和Weka3.6.1软件进行单分类器分类,然后在IDL中实现基于DF的启发式搜索。
本文使用AVIRIS数据,该数据于1992年6月12日由NASA飞机获得的,该景影像包括拉斐特西部6英里的范围。该数据为经过定标的数据,首先要将数据值转换为辐射值。去掉4个坏波段后为220个波段。图2为波段58,15,6假彩色合成图像。
根据当地的地物特点,将该区域的土地覆盖类型划分为:紫花苜蓿、玉米、草、干草、燕麦、大豆、麦子、树林、建筑物-草-树-车道、石头-钢铁-塔。选择样本共10410个像元,通过选择训练样本进行监督分类,选用的分类器有:SVM(1)、MLC(2)、Mahal-dist(3)、Min-dist(4)、j48 DT(5)、BPNN(6)、naive bayes(7)、RBFNN(8)、SAM(9)、SID(10)、Random tree(11)、BF tree(12),括号内为分类器序号。
通过基于差异性的启发式搜索算法选择最优分类器集合,采用的差异性测度方法为DF,组合方法为加权投票法,最终选择的集合为{2,5,6,11,12},组合后分类精度为96%。本试验中搜索部分耗时10.36。同时,我们将所有其他可能的组合进行一一验证,发现基于差异性的启发式搜索算法提供了一组最优解。如果不进行分类器选择,将12个分类器进行组合,其精度为90.7%。图3为两种组合方法分类结果图比较。
5 结论
本文通过应用启发式搜索算法,基于AVIRIS数据试验,表明启发式搜索算法,对于分类器选择具有一定指导意义;同时研究发现,并非用于组合的分类器数据越多,分类精度越高。但是本文未考虑但分类器本身的缺陷或能力,分类器组合精度是成员分类器精度和差异性的折中,在实际分类器选择过程中需要综合考虑二者,但是差异性与精度的组合方式,以及二者的重要程度如何确定需要后续继续研究。
[1]王鹏.基于多样性度量的多分类器融合研究[D].镇江:江苏大学,2007.
[2]Kang HJ,Doermann D.Selection of classifiers for the construction of multiple classifier Systems[C].// Proceedings of the Eight International Conference on Document Analysis and Recognition. Seoul, Korea:IEEE Computer Society,2005:1194-1198.
[3]邢文训,谢金星.现代优化计算方法[M].北京:清华大学出版社, 2005.
[4]王建树.启发式算法在服务组合中的研究与实现[D].长春:吉林大学计算机科学与技术学院,2009.
[5]Giacinto G,Roli F.Design of effective neural network ensembles for image classification processes[J]. Image Vision and Computing Journal,2001,19,699-707.
作者单位 航天恒星科技有限公司 北京市 100000
李光丽(1984-),女,山西省阳泉市人。硕士学位。现为航天恒星科技有限公司系统设计师。主要研究方向为遥感图像处理及相关应用。
猜你喜欢
数学物理学报(2022年3期)2022-05-25 13:33:12
数学物理学报(2022年2期)2022-04-26 14:07:54
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
数学物理学报(2020年4期)2020-09-07 09:14:00
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:44
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
