
基于GPRS的远程控制技术开发
2011-03-24 13:42关成斌邢福成孙盛坤
海军航空大学学报 2011年3期
关成斌,王 捷,邢福成,孙盛坤
(1.海军航空工程学院电子信息工程系,山东 烟台 264001;2.海军装备部驻天津地区军事代表局,北京 100073)
随着科技的发展,人类进入了信息时代,人类对信息的获取越来越多,但信息时代的另外一个重要的特点是在人们的生产生活中越来越依赖信息技术,从而达到节省时间、提高效率、节约经费的目的[1]。目前,信息技术的一个重要应用方向是远程控制技术,比如对油井的远程检测和控制[2];对森林防火的监测与灭火装置的控制;对民用水、电、暖、气的远程自动查表系统[3-4];对农作物长势和病虫害的远程监测;对水质的远程自动监控[5-6]等。
由于远程控制的广泛应用,目前对远程控制技术的研究很多,如蓝牙遥控技术、红外遥控技术、专用无线电遥控技术、基于GSM的短信控制技术、基于有线网络的控制技术、基于GPIB 总线的控制技术等。但蓝牙、红外、GPIB 控制技术存在传输距离近的缺点,专用无线电遥控技术存在开发成本高、传输距离受限制的问题,基于有线网络的控制技术存在布线复杂、覆盖范围有限的问题,基于GSM 短信的控制技术存在延迟时间长,实时性差的问题。为了解决上述技术方法的缺陷,实现超远程、实时、经济的远程控制,本文研究开发了基于GPRS的远程控制技术。
1 GPRS 简介
GPRS(General Packet Radio Service)是基于GSM网络的通用分组无线服务,它以传输速率高、成本低廉、信号覆盖广、无线传输等特点在远程数据传输方面有广泛的应用。
GPRS与另外一种基于GSM网络的数据传输业务——CSD 业务不同,GPRS 业务以数据流量计费,而GSM CSD 业务则以时间计费,GPRS 这一计费方式更适合于长期在线的、低数据率的远程控制使用。此外,GPRS的数据传输速度较GSM CSD 也有很大提高,可提供高达115 kb/s的传输速率,而其升级版本EDGE的速率已经达到384 kb/s,可满足未来大数据率远程控制的需求。GPRS的主要特点有:
1)可充分利用现有资源——覆盖全国的GSM网络,方便、快速、低建设成本地将用户数据终端接入网络;
2)传输速率高,GPRS的升级版本EDGE数据传输速率最高可达384 kb/s,而3G网络的传输速率则更高;
3)接入时间短,GPRS 接入等待时间短,平均2 s 即可建立连接;
4)提供实时在线功能,用户将始终处于在线状态,使数据传输变得非常简单、快速;
5)按流量计费,按照用户接收和发送数据包的数量来收取费用,没有数据流量的传递时,用户即使在线也是不收费的。
综合考虑,GPRS是目前进行无线远程控制的一种较完美的数据传输业务。随着3G 无线通信的推广,将其应用于远程无线控制系统上,稳定性会更高,数据传输速率会更快,可为语音、视频监控技术的发展提供条件[7-9]。
2 系统设计
2.1 整体设计方案
本文开发了对一个自制小车的遥控系统,从功能上可将系统分为两部分:车载终端和监控中心。车载终端主要由主控单片机C8051F020、SIM508模块(集成有GPRS模块)、电机及驱动电路组成;监控中心是一台安装有监控软件的计算机,该计算机需连接互联网。在主控单片机C8051F020的控制下,车载终端利用GPRS模块在车载终端与监控中心之间建立一条UDP协议数据传输通道,通过监控中心的监控软件向终端发送控制指令,该指令通过UDP协议传输给GPRS模块,GPRS模块将该信息送给主控单片机,单片机根据该信息控制电机执行指定的运动模式,系统结构如图1所示。
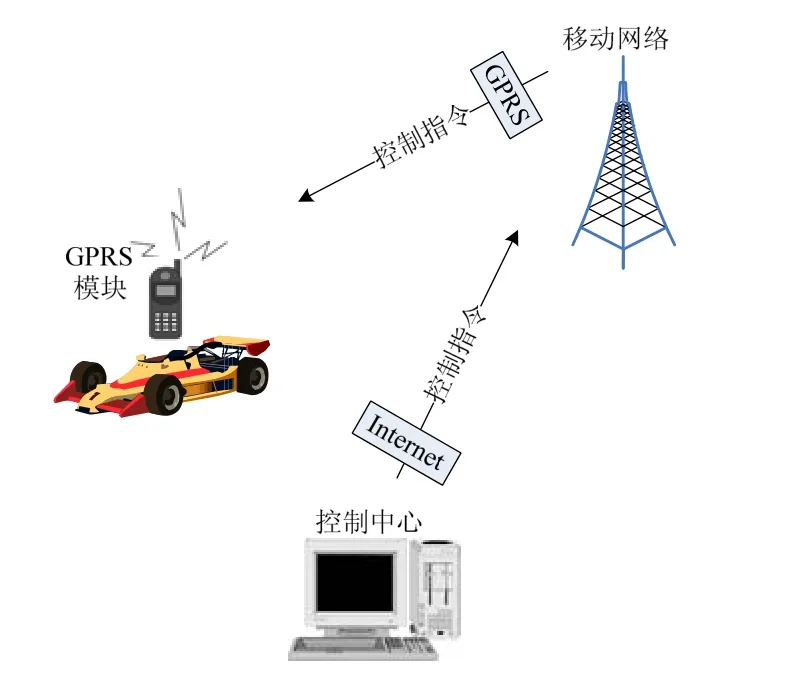
图1 系统结构图
2.2 车载终端硬件设计
本系统的控制中心主要实现产生控制指令并通过互联网将其发送出去的功能。硬件部分是一台连接互联网的计算机,因此本文在控制中心的主要工作是设计监控软件。车载终端的开发需要进行硬件设计。车载终端的硬件结构如图2所示,SIM508模块的GSM_MAIN 串口与单片机C8051F020的串口相连,单片机的P3.0-P3.3的4个I/O 端口连接到光耦合器TLP521−4的4个输入引脚上。2个电机驱动板与TLP521−4的输出引脚相连。各硬件组成部分介绍如下。
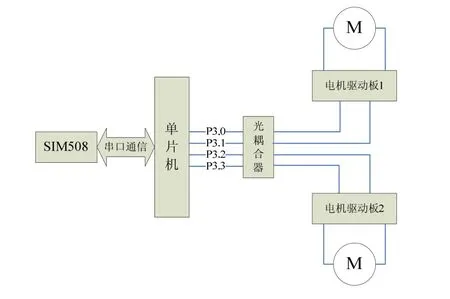
图2 车载终端的结构图
1)主控制器。
主控制器是车载终端的控制部件,它根据遥控指令控制车载终端的运动,对主控制器的要求是执行代码效率高,稳定性好。单片机是一个集成在一块芯片上完整的计算机系统,其具有体积小、重量轻、价格便宜的特点,而且具有丰富的数据传输和控制接口。因此本系统采用单片机作为主控制器。
选用的主控制器为C8051F020 单片机,它是按工业测控环境要求设计的,抗干扰能力强,具有与8051 单片机兼容的高速CIP-51 内核,与MCS-51指令集完全兼容,片内集成了数据采集和控制系统中常用的模拟、数字外设及其他功能部件;内置FLASH 程序存储器、内部RAM,大部分器件内部存在XRAM。C8051F020 单片机具有片内调试电路,通过4 脚的JTAG接口可以进行非侵入式、全速的在线调试。
2)GPRS模块。
SIM508模块是一款集成了三频GSM/GPRS 功能和GPS 功能的模块,整合了附加元器件的SIM508模块,可以节省很多时间和成本。
SIM508模块的GSM/GPRS模块主要参数:①三频900/1800/1900 MHz;② GPRS(class 10)标准;③ 满足 GSM(2/2+)标准;④通过 AT 命令控制(GSM07.07,07.05和增强AT 命令)。
3)光耦合器。
TLP521−4 光耦合器用于隔离单片机和电机驱动板之间的电器连接,防止电机刚启动或正负极电压发生变化时,其内部线圈产生的很大的感应电流对单片机的冲击。
4)电机驱动电路设计。
电机驱动电路如图3所示,当1D、D2为低电平时,三极管 Q1、Q2、Q3、Q4、Q5和Q8都截止,Q6、Q7导通,电机正负极电压都为0,电机不转;当D1为高电平、D2为低电平时,Q3、Q4、Q6和Q8截止,Q1、Q2、Q5和Q7导通,电机一端电压为12 V 一端为0,电机正转;当D1为低电平、D2为高电平时,Q1、Q2、Q5和Q7截止,Q3、Q4、Q6和Q8导通,电机一端电压为0,一端为12 V,电机反转;当D1和D2都为高电平时,Q6、Q7截止,Q1、Q2、Q3、Q4、Q5和Q8都导通,电机正负极电压都为12 V,电机不转。不同的电平条件下电机运动状态如表1所示。
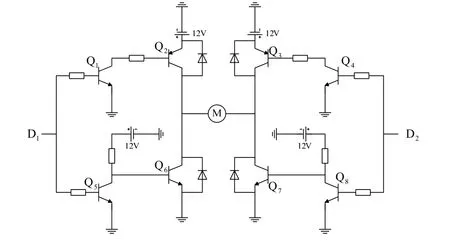
图3 电机驱动电路图
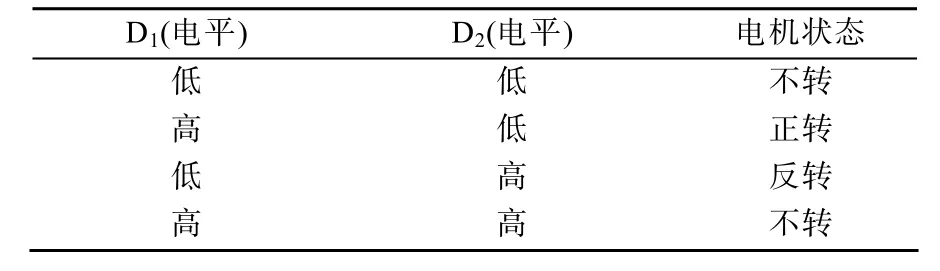
表1 电机驱动电路状态表
5)车辆设计。
本文自制的三轮小车,采用了2个独立的直流电机作为主动轮的驱动器,另外1个万向轮作为支撑轮,通过控制2个主动轮运动状态实现车辆运动状态的改变,如左右轮同时顺时针转则前进;左轮顺时针转,右轮不转则右转,其他状态类推。
本系统选用永磁式直流电机,这种电机只有2根引线,控制方法比较简单,只需给电机的2根控制线加上适当的电压即可使电机转动起来。可通过调节供电电压实现调速功能,通过改变两根引线的极性实现电机转向的控制,其驱动电路受单片机控制。
2.3 软件设计
1)控制中心软件设计。
控制中心的软件流程如图4所示。首先获取本地IP 地址,利用互联网的在线短信收发服务将IP地址发送到车载终端的SIM508模块手机卡号上,短信格式为“!***.***.***.***@”。车载终端利用接收到的IP 地址可建立与控制中心的UDP 连接,实现向控制中心传送信息的功能。然后,车载终端通过UDP 连接将终端IP 地址发送到控制中心,控制中心利用该IP 地址建立与终端的UDP 连接,实现控制中心到车载终端的控制指令的传输。键盘上的“W”、“A”、“D”、“S”、“X”这5个键分别对应“前进”、“左转”、“右转”、“后退”、“停止”这5个遥控指令,为了使该软件能在后台运行,且截获所有进程的键盘消息,设计了键盘监控功能。
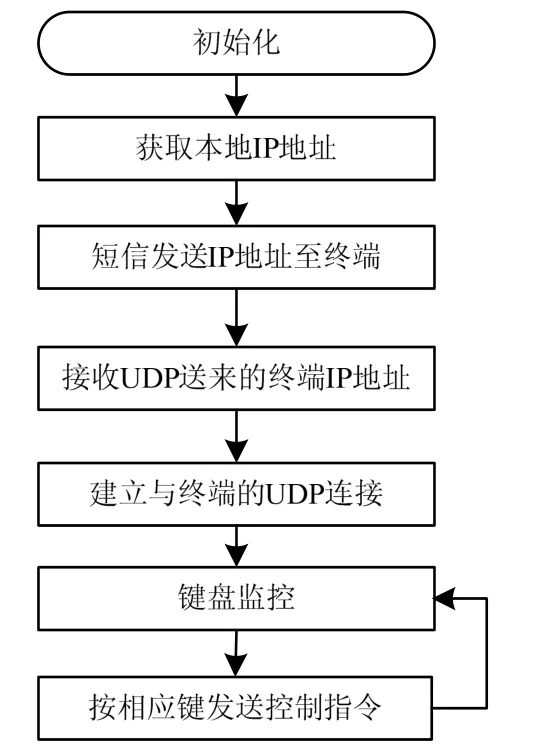
图4 控制中心软件流程图
2)车载终端程序设计。
C8051F020 单片机程序的流程图如图5所示。程序启动,对单片机和SIM508模块进行初始化:配置系统时钟、串口;查询SIM508模块是否处于UDP 连接状态,如果没有连接则等待新短信提示,当SIM508模块接收到短信,单片机进行读取,获取监控中心的IP 地址,建立UDP 连接;主控单片机利用AT指令获取GPRS模块的IP 地址,通过UDP 连接发送给主控制器,用于建立主控制器到车载终端的UDP 连接;然后判断遥控指令,若接收到遥控指令则执行遥控程序,控制车辆的运动;再跳转到判断遥控指令的程序段;若在查询UDP 连接状态时,车载终端已经与监控中心处于连接状态,则直接跳转到判断遥控指令的程序段。
根据设计要求,遥控小车的运动状态有前进、后退、左转、右转和停止5种,那么就需要5种遥控指令。本系统的设计思路是:监控中心发送5种不同的预定字符给GPRS模块,GPRS模块将其通过串口传给C8051F020,C8051F020根据接收到的控制字符来控制P3.0、P3.1、P3.2和P3.3的高低电平及极性,从而实现5种运动状态的控制。

图5 单片机程序流程图
3 试验结果
对设计的远程控制系统进行了试验,对连接成功率、发送成功时间进行了验证[10],并与采用短信的通信方式进行了对比。
进行50次试验,延迟时间超过9 s 认为连接不成功,采用短信方式不成功次数为5次,如表2所示;如果认为超过1 s 认为连接不成功,采用GPRS方式为2次,如表3所示。

表2 采用短信工作方式下延迟时间对应的次数
由表2和表3可以看出,采用GPRS 工作方式的指令发送延迟时间远远小于短信工作方式。
而从通信费用上考虑,发送50条短信,按每条0.1元算,费用为5元。而采用GPRS 方式,在连接时需要发送1条短信,费用为0.1元,GPRS流量费按0.03/kb元计算,每条指令只需要发送一个字符,因此50条指令需要不超过1 kb的流量,为0.03元,一共需要0.13元。可见,采用GPRS 工作方式具有很好的经济性,特别是对应于需要频繁控制的场合这种优势更加明显。
4 总结与展望
本文研究基于GPRS和单片机的经济型远程控制系统,并在车载终端上通过了试验。试验表明,采用GPRS的远程控制系统具有较高的稳定性、实时性和经济性。
GPRS网络是覆盖全国的,采用本文所述的技术可以实现对全国范围内的终端进行远程控制,而且随着3G网络的应用以及网络稳定性的进一步提高,采用通用无线网络的远程控制技术必将成为远程控制的一个重要发展方向而广泛应用于民生和工业生产中。如在电力自动化系统[11]、对灾区地质灾害的监测[12]等方面已经做了相应的探索。预计不久的未来将广泛应用于大范围分布行业的监视控制中,如油井现场的数据采集与控制、电力运行状态的实时监控、移动通信基站运行状态监控、自来水设施及水质的监控、地质监测、对车队的管理和定位等等。
这项技术除了在民用和工业领域使用以外,在军事领域也有广阔的应用前景。如采用卫星通信提供的数据传输服务,结合全球卫星定位系统可以实现导弹、无人机的精确制导,实现部队、装备和人员的精确定位和控制,从而可对战场态势进行实时监控,对兵力部署、部队调动、态势评估、紧急救援等战术应用具有重要意义。
[1]邱丽波,夏俊芳,王瑞奇,等.基于嵌入式系统的无线信息共享系统研究[J].现代电子技术,2008,31(5)∶33-36.
[2]李纪扣.基于GPRS和Web模式的油井监控系统设计[J].天津科技大学学报,2010,25(3)∶71-74.
[3]朴兴哲,李英顺,蔡林,等.基于GPRS网络的远程供暖数据监控系统[J].沈阳工业大学学报,2009,31(3)∶323-327.
[4]韩晓萍,邵宏强,李佰国.GPRS技术在电力远程抄表系统中的应用[J].电子测量与仪器学报,2005,19(4)∶81-84.
[5]刘裕伟.GPRS技术在供水测控系统中的应用[J].水利技术监督,2010,18(4)∶49-52.
[6]陈军,盛占石,陈照章,等.基于GPRS的水质自动监测系统的设计[J].传感器与微系统,2009,28(7)∶77-79.
[7]吕文超.GPRS和无线传感器网络技术在过程控制中的应用与研究[D].南京∶南京理工大学,2009.
[8]刘峰,韩春燕,林浒.基于嵌入式 TCP/IP的远程GPRS 控制终端的设计与实现[J].小型微型计算机系统,2006,27(6)∶1069-1071.
[9]傅中君.嵌入式GPRS 无线通信模块的设计与实现[J].计算机工程与应用,2004,40(14)∶162-165.
[10]陈辉,陈虎,奚建清.嵌入式系统TCP/IP协议性能测试与分析[J].计算机工程,2007,33(21)∶99-101.
[11]李惠宇,罗小莉,于盛林.一种基于GPRS的配电自动化系统方案[J].电力系统自动化,2003,27(24)∶63-65.
[12]袁生贵,方东,李小凯.基于GPRS 监测技术在灾区山体滑坡中的应用探讨[J].自动化技术与应用,2010,29(10)∶69-71.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
小学生优秀作文(低年级)(2021年11期)2021-12-06
飞控与探测(2021年4期)2021-11-26
铁道通信信号(2020年8期)2020-02-06
建材发展导向(2019年13期)2019-08-24
汽车维修与保养(2019年3期)2019-06-19
电子制作(2019年7期)2019-04-25
语文世界(小学版)(2019年2期)2019-02-24
山东工业技术(2016年15期)2016-12-01
汽车零部件(2014年5期)2014-11-11
