
8/6极开关磁阻电机的双极性励磁策略研究
2011-02-27 13:29刘晓庆张代润
电源学报 2011年2期
刘晓庆,张代润
(四川大学电气信息学院,成都 610065)
引言
开关磁阻电机调速系统 (Switched Reluctance Drive System——SRD),作为一种新型的调速系统,具有高效节能、调速范围广、简单可靠等优点,并且开关磁阻电机 (Switched Reluctance Machine——SRM)结构简单,成本比传统电机要低,因此在家用电器、工业应用等方面得到了广泛的应用。文献[1-2]阐述了SRM的一种新型的励磁方式——双极性励磁,并且描述了实现SRM双极性励磁的功率变换器:双极性不对称桥式功率变换器(Asymmetric Bridge Bipolar Converter,ABBC)。 本文以 4 相 8/6 极开关磁阻电机为例,通过仿真简要对比了双极性励磁策略和传统励磁策略下SRM的磁场分布,并且搭建了硬件电路实现了开关磁阻电机的双极性励磁。
1 双极性励磁策略[3-4]
功率变换器是SRD的重要组成部分,是SRM的能量提供者。功率变换器在SRD的成本中占有很大的比重,并且其设计的好坏直接影响到SRD系统的性能。常见的功率变换器电路有不对称半桥电路、双绕组电路和裂相式电路,上述的三种功率变换器只能向SRM提供单方向的电流。从SRM的运行条件上讲,功率变换器只需要为SRM提供单方向的电流就能维持其运行,所以SRD比异步电动机PWM变频器简单可靠[6-7]。但是,这些功率变换器的单向励磁电流限制了双极性励磁的实现。文献[1-2]中描述了一种新的功率变换器的拓扑:双极性不对称桥式功率变换器(ABBC),ABBC的拓扑如图1所示。
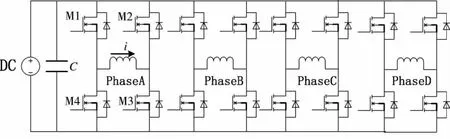
图1 ABBC拓扑图
在SRM的双极性励磁过程中,电机的磁路比传统励磁方式下的磁路要短,这也就意味着在磁路中的能量消耗更小、效率更高,另外其还具有比较小的转矩脉动。这也就是双极性励磁策略相对于传统励磁方式的优势[3](详见1.2)。
1.1 双极性励磁策略与传统励磁策略的比较
所谓的双极性励磁是指SRM绕组的励磁电流为双向的。与传统的励磁方式比较,双极性励磁策略要相对复杂些。下面以4相8/6极SRM的励磁为例比较这两种励磁策略。
在SRM的应用过程中,为了有效地利用功率变换器,使用大量的两相重叠是一种比较常用的方法。在8/6极SRM中两相重叠的角度最大为15°[5]。因此,两相重叠的传统励磁策略如图2(a)所示,开关磁阻电机的各相绕组电流方向一致,相邻两相的最大重叠角小于15°;双极性励磁策略是指相邻各相的电流重叠角最大不超过15°,并且相邻两相的电流方向相反,具体情况如图2(b)所示。
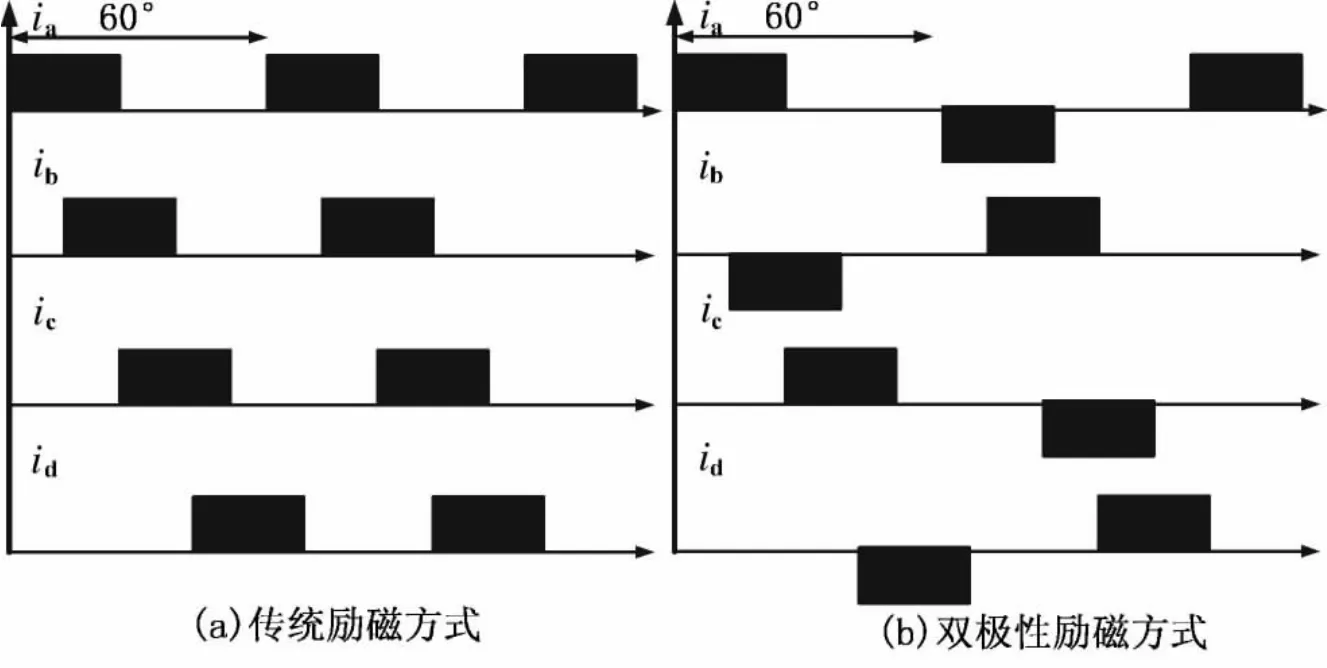
图2 传统励磁与双极性励磁策略励磁电流的比较
1.2 双极性励磁与传统励磁下磁场的分析
开关磁阻电机定子绕组联接方式一般采用正向串联联接,如图3(a)所示。根据图中所示的A相电流的方向及绕组情况,可知定子内圆上的极性分布如图3(a)所示。同理可得在励磁电流方向一致的情况下B,C,D相对应的定子内圆磁极分布如图3所示。从图3(a)中可以看出定子内圆上磁极的分布为:SSSSNNNN。
传统励磁方式下各相励磁电流方向一致,定子内圆磁极分布如图3所示。当两相绕组同时励磁时可以分为两种情况分析:(1)相邻两相定子磁极极性相同,如 AB,BC,CD;(2)相邻两相定子磁极极性不同,如DA。在相邻定子磁极极性相同时,如图3(b)所示,大部分磁力线沿闭合曲线L1,L2闭合;在相邻两相定子磁极不同时,如图3(c)所示,大部分磁力线沿闭合曲线L3,L4闭合。对比图3(b)和(c)可知,在相邻定子磁极极性不同的情况下两相绕组同时励磁才会形成最短的磁路。
通过上面的分析可知,在传统励磁方式下,一个开关磁阻电机的电周期中,只有在D相、A相同时励磁时才会出现最短磁路。一个电周期中SRM的磁场分布如图4(a)所示。
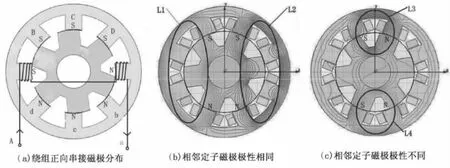
图3 开关磁阻电机的磁场情况分析图
为了使SRM电周期中的每个状态下磁路都为最短磁路,修改励磁策略为:AB,BC,CD两相绕组同时励磁时,两相的励磁电流方向相反;DA两相绕组同时励磁时,两相励磁电流方向相同(即双极性励磁策略,如图2(b)所示)。这样,一个电周期中的磁场分布如图4(b)所示。
对比图4(a)和(b),可以看出在传统励磁方式下,四相8/6极的SRM在每个电周期结束时,会形成最短的磁路,且该闭合磁路比另外三个状态下的磁路短,这样就造成电机旋转过程中磁场的不对称,在每个电周期结束时会有很大的转矩脉动[1];在双极性励磁的情况下,整个电周期中SRM都是运行在最短磁路状态,这样旋转过程中转矩脉动较传统励磁方式要小,两种励磁方式下的转矩比较如图5所示[1]。另外,较短的磁路也有利于损耗的降低。总之,双极性励磁方式相对于传统励磁方式具有效率高、转矩脉动小的优点[1-3]。
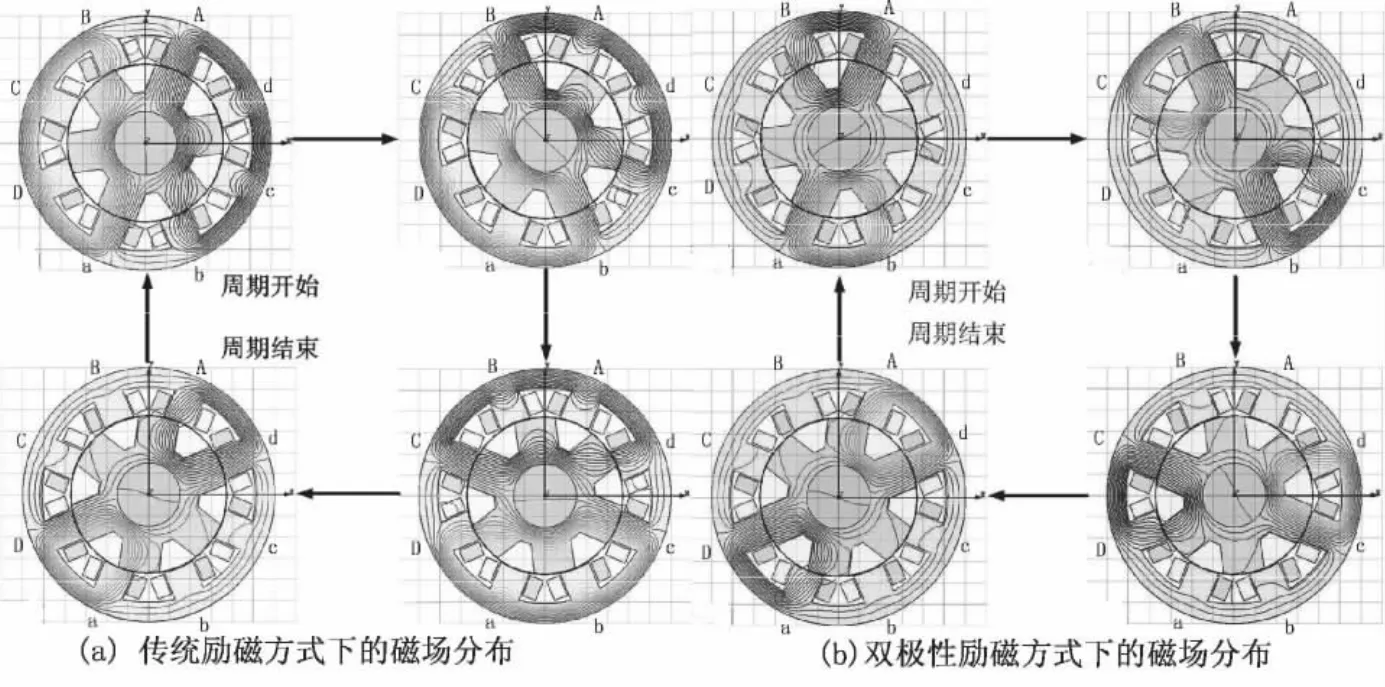
图4 传统励磁方式和双极性励磁方式下的磁路情况
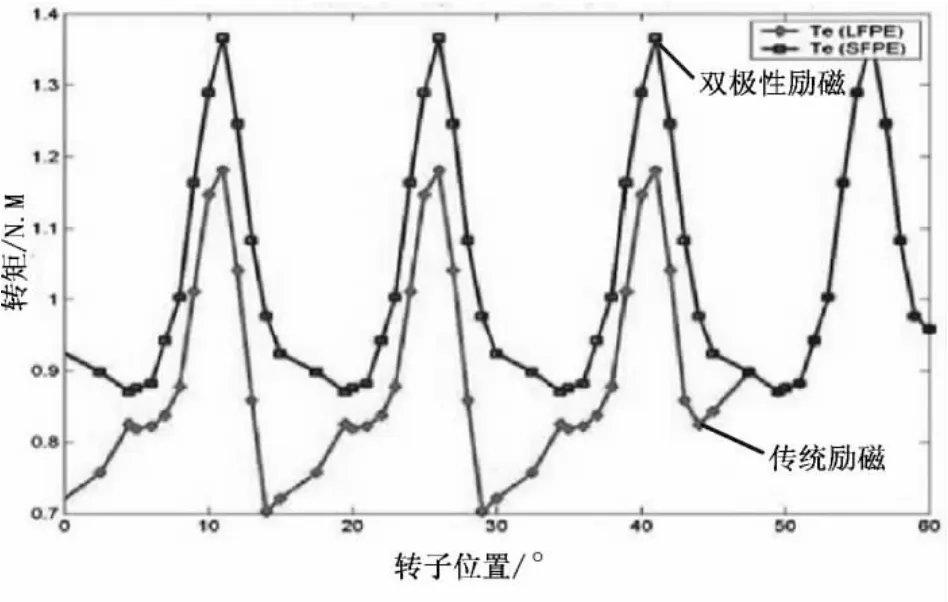
图5 传统励磁方式与双极性励磁的转矩比较[1]
2 系统设计
本文实验中的SRM的额定转速为1 500 r/min,额定功率为550 W,结构为8/6极。SRD系统的结构框图如图6所示,主要由控制器、SRM、位置检测装置、电流采样装置、功率变换器、驱动电路和电源等部分组成。
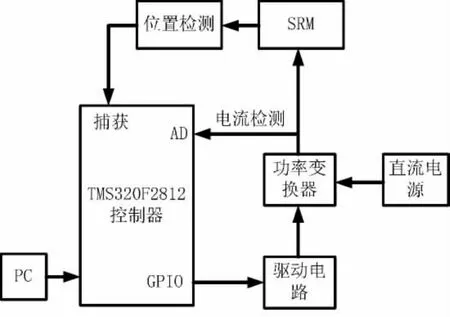
图6 SRD系统的结构图
2.1 硬件设计
本文中SRD的控制器采用了TI公司的DSP TMS320F2812。实验中采用的功率变换器是ABBC,其拓扑如图1所示,分别控制A相开关管M1和M3,M2和 M4就能实现电流的双向控制,B,C,D 相的控制与A相相同。可以看出ABBC共需要8路可控的PWM控制信号,而DSP F2812具有12路PWM输出,满足控制要求;内置的16路12位AD转换器,为电流采样提供了方便;具有6路捕获通道,可以实现电机的位置检测。
2.1.1 位置检测[8]
电机的位置检测本文采用的是光电式位置传感器。这种传感器由两部分组成,两个相隔75°的槽形光耦和与转子同结构的齿盘。当转子旋转时,带动齿盘旋转不停地切断光耦的光路,从而使光耦输出与位置相关的两路信号,经整形便可获得与转子位置相关的30°的方波信号。为了滤除位置信号中的干扰,需要将位置信号通过一个门电路后输出。位置检测信号的整形处理电路如图7所示。
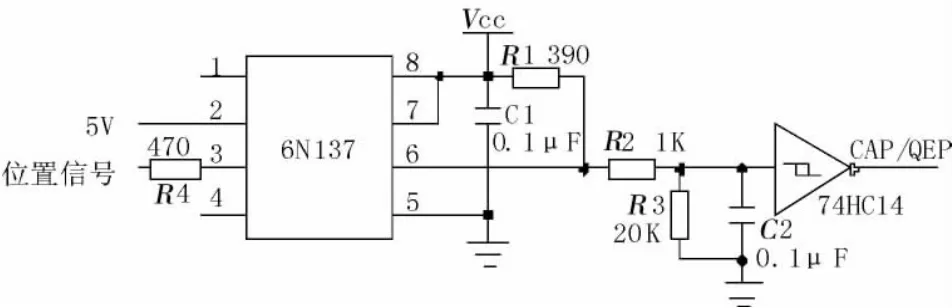
图7 位置检测信号整形处理电路
2.1.2 电流检测
为了实现电流的控制必须对相电流进行检测。本文实验中采用了霍尔电流传感器CS010GT。实验中绕组A与C,B与D不会同时导通,所以A与C,B与D分别共用一个电流传感器,然后通过软件鉴别采样的是那一相的电流。检测的电流信号是双极性的,必须经过信号调理把信号转换为0-3 V的范围内才能输入DSP。实验中采用了仪用放大器AD620,除了增益可调外,AD620参考端加一电压,可使输出电平产生相应的严格平移。利用这个特性,将电流传感器输出的双极性信号变换为单极性信号,以满足后续A/D转换电路的需要。电流信号的处理如图8所示。
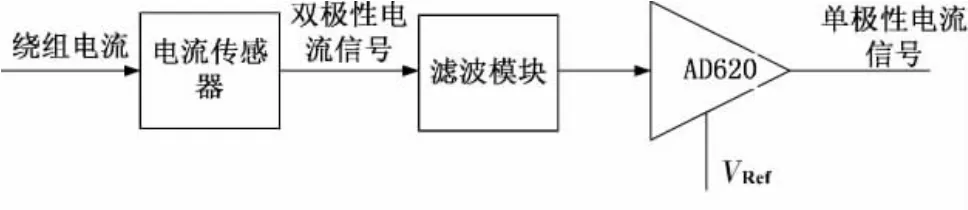
图8 电流信号处理框图
2.2 控制方式[9]
SRD的控制方框图如图9所示。从图中可以看出该系统内环是电流闭环控制,外环是速度闭环控制,同时还要包括电机自身的位置闭环。在速度闭环中采用的是简单的PI控制方式;电流闭环控制是通过改变固定频率的PWM控制信号的占空比来实现电流的控制。另外,在SRM的换相控制上,本实验中固定了导通角,即θoff与θon之差不变,也就是通过控制超前开通角的大小来控制开通角和关断角[9]。
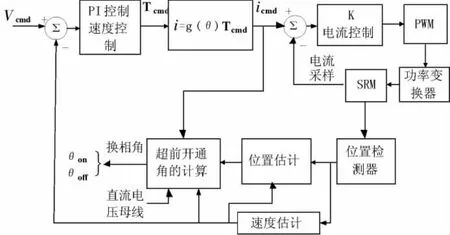
图9 SRD控制方框图
2.3 软件设计
控制器TMS320F2812的内部资源分配如下:定时器1和定时器3为PWM1~8输出提供时间基准;定时器2作为捕获单元的时间基准;定时器4用来作周期中断的时间基准;ADCINB0和ADCINB1为电流采样通道,采用周期中断启动AD转换;事件管理器A的cap1和cap2端口用作捕获位置检测信号,实现位置检测和速度检测。系统软件结构如图10所示。
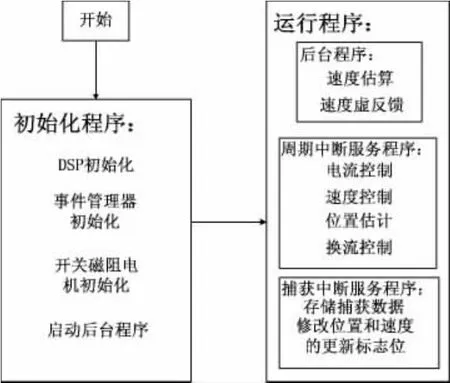
图10 程序结构图
3 实验结果
根据以上的介绍搭建了实验装置,如图11所示。500 r/min速度给定下的位置检测波形如图12(a)所示。双极性励磁控制下的功率变换器的输出电压如图12(b)所示。实验过程中在双极性励磁方式下SRM运行良好,从而证明了双极性励磁方式是可实现的。
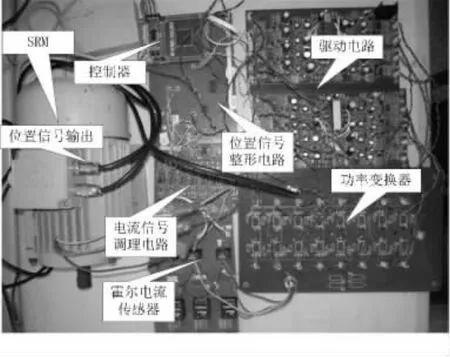
图11 硬件电路
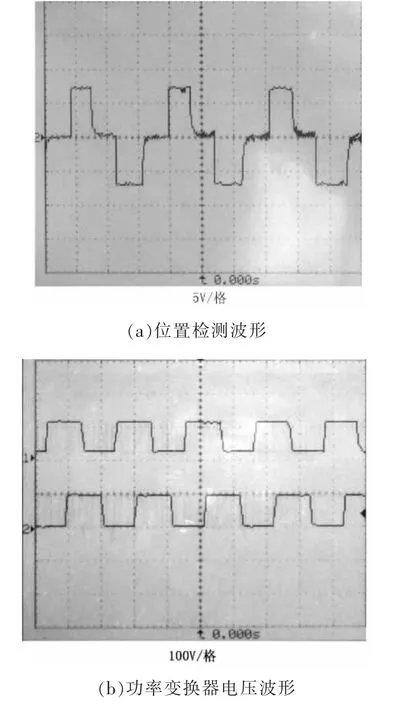
图12 实验波形
4 结束语
本文分析了SRM的传统励磁策略和双极性励磁策略,通过仿真比较两种励磁方式下电机的磁场分布情况,从而论证双极性励磁策略相对于传统励磁策略的优点。并且搭建了实验平台,实验验证了双极性励磁策略的可实现性。为开关磁阻电机降低转矩脉动、提高效率提供了一种控制方案。
[1]Chris S Edrington.Analysis and Operational Characteristics of a Reduced Parts converter for Bipolar Excitation of SR Drives[C].IEEE Vehicle Power and Propulsion Conference,6-8 Sept,2006.
[2]Chris S Edrington,M Krishnamurthy,B Fahimi.Bipolar switched Reluctance Machine:A NovelSolution for Automotive Applications [J]. IEEE transactions on Vehicular Technology,2005,54(3),795-808.
[3]Chris S Edrington.Bipolar Switched Reluctance Machines[C].IEEE PES General Meeting,2004:1351-1358.
[4]Chris S.Investigation of Electromagnetic Force Components in SRM under Single and Multiphase Excitation[J].IEEE transactions on Industry Applications,2005,42(4):978–988.
[5]Mahesh Krishnamurthy,Chris S Edrington.Making the Case forApplicationsofSwitched Reluctance Motor Technology in Automotive Products[J].IEEE transactions on power electronics,2006,21(3):659-675.
[6]王宏华.开关型磁阻电机调速控制技术[M].北京:机械工业出版社,1995.
[7]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,1999.
[8]周春.基于DSP的开关磁阻电机调速系统实验平台设计[D].杭州:浙江大学,2004.
[9]TI.Switched Reluctance Motor Control-Basic Operation and Example Using the TMS320F240 [R].Texas Instruments Incorporated.February 2000.
猜你喜欢
防爆电机(2021年4期)2021-07-28
时代英语·高一(2019年5期)2019-09-03
传感器世界(2018年5期)2018-11-16
微特电机(2016年9期)2016-12-20
电子制作(2016年11期)2016-11-07
电测与仪表(2016年11期)2016-04-11
电源技术(2015年5期)2015-08-22
电机与控制应用(2015年2期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
电子设计工程(2015年3期)2015-02-27
