大孔径反射镜组件随机振动响应分析与试验
2011-02-12 11:39董得义辛宏伟杨利伟李志来关英俊
振动与冲击 2011年11期
董得义,辛宏伟,杨利伟,李志来,关英俊
(1.中国科学院 长春光学精密机械与物理研究所,长春 130033;2.中国科学院 研究生院,北京 100039;3.长春工业大学 机电工程学院,长春 130012)
为了满足空间光学感遥器高分辨、宽覆盖、大视场[1,2]的要求,反射镜孔径越做越大,质量越做越重,这给反射镜支撑结构的设计带来的极大的困难。
当前,各国空间光学遥感器的研制过程中,大孔径反射镜的支撑技术都是空间光学遥感器的关键技术之一[3,4]。
由于光学遥感器在运载、发射以及在轨运行过程中,需要承受各种动力学环境以及热环境的交互作用[5],这些环境约束的存在使得光学遥感器反射镜支撑结构的设计处于一个矛盾的境地:一方面,为了避免在运载、发射过程中反射镜组件出现结构变形、微屈服、疲劳破坏等现象,需要反射镜的支撑结构具有足够的刚度、强度特性;而另一方面,由于反射镜组件中各种材料的线胀系数的不匹配[6],为了避免热变形导致镜面面形产生相对位置以及光学元件的波前畸变,影响光学系统的成像质量,又需要反射镜的支撑结构具有一定的柔性,通过支撑结构在热载荷中产生较大的变形达到卸载和吸收由热变形引起的应变能,从而达到保护镜面不会产生较大的畸变的目的。由此可见,如何保证反射镜组件具有足够的动态特性、较高的热尺寸稳定性,反射镜支撑结构的设计成为解决问题的关键[7]。
如何保证大孔径反射镜的支撑结构在具有一定柔性的基础上,顺利通过鉴定级的随机振动试验成为了结构设计人员亟需解决的问题。据国外统计,卫星发射上天后,第一天所出现的故障,有30% ~60%是由动力学环境所引起的[8],动力学环境对星上载荷结构造成的损坏已经成为星上载荷结构失效的主要因素之一,因此对星上载荷的支撑结构进行动力学响应分析,根据分析结果对结构进行优化设计已经成为提高产品可靠性的关键技术手段[9]。
本文对某光学遥感器的大孔径反射镜组件进行了随机振动响应分析,预示了反射镜柔性支撑结构上的应力响应,并在反射镜组件的随机振动试验中对反射镜柔性支撑结构上的应力响应进行了测量,通过分析结果与试验结果的对比,验证了分析方法的有效性。
1 随机振动响应分析的基本原理
在随机振动试验中,任一瞬时各种频率成分的激励同时作用在反射镜组件上,因此无法预测其瞬时的振动变化规律,一般用整个加载周期内的均值、均方根、累计均方根和功率谱密度等统计量研究反射镜在随机振动试验中的响应[10]。
本文采用MSC.NASTRAN进行反射镜组件的随机振动响应分析,在MSC.NASTRAN中把随机响应分析当作频率响应的后处理来进行[11]。其输入文件不但包括频率响应分析的输出结果,而且包括用户以功率和相关谱密度形式提供的载荷情况。输出结果为响应的功率谱密度、自相关函数、每单位时间的正斜率方向的零交点个数、以及响应的均方根值(RMS值)等等。
在直接频率响应分析中,通过用复数代数算法求解一系列耦合的矩阵方程,计算离散激励频率结构响应。对简谐激励下有阻尼强迫振动,运动方程为:

对简谐运动(频率响应分析的基础),假定一个简谐形式的解:

其中,{u(ω)}为复位移向量。
对式(2)求一阶及二阶导数得:

将上述表达式代入式(1)得:

除以 eiωt简化为:

利用复数算法,对于每一个输入激励频率的运动方程,可以像静力学问题类似地求解。
2 大孔径反射镜组件的有限元模型
2.1 大孔径反射镜组件的结构
大孔径反射镜组件结构的剖面图如图1所示,主要由反射镜、柔性支撑以及三角板等构件组成。
柔性支撑结构如图2所示。
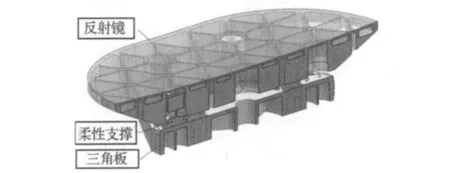
图1 反射镜组件结构剖面图Fig.1 Cross-section view of large mirror component
2.2 大孔径反射镜组件的有限元模型
根据零件结构的特点,采用 8节点六面体单元对各零件进行有限元网格划分,个别拐角的地方采用五面体楔形单元过渡,整个组件的有限元模型如图3所示。
在反射镜组件的有限元模型中共划分了124 150个单元,180 020个节点。在大孔径反射镜组件的建模过程中主要考虑了以下几点:
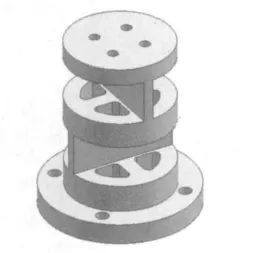
图2 反射镜柔性支撑结构模型Fig.2 The structure model of the flexible support

图3 反射镜组件有限元模型Fig.3 The finite element model of the mirror component
(1)有限元模型按照设计人员提供的三维模型构造,以保证有限元模型与设计结构一致;
(2)在关键的力的传递路径上(比如:柔性支撑结构):网格划分较密;非关键部位网格划分可适当稀疏一些,反射镜柔性支撑的有限元模型如图4所示。
(3)反射镜组件中的螺钉连接采用杆单元与RBE2多点约束进行模拟。

图4 柔性支撑的有限元模型Fig.4 The finite element model of flexible support
有限元模型中所用到的主要材料参数见表1。

表1 材料主要参数Tab.1 Main parameters for materials
3 反射镜组件结构阻尼的测定
采用直接法进行频响分析过程中,需要输入结构阻尼。阻尼代表结构中能量耗散的一种数学近似。阻尼由多种机制引起,例如:粘性效应;外摩擦(结构结合部之间的滑动);内摩擦(材料类型的特点);结构的非线性(塑性、间隙)。因为这些影响很难定量,所以阻尼很难准确模拟,阻尼经常基于动力试验的结果进行分析计算。
阻尼是许多复杂机制引起的结果,在计算响应中,阻尼的影响有赖于动力分析的类型及载荷持续的时间。在短时间载荷作用下,阻尼经常可以忽略,例如冲击载荷的作用,因为能量还没有来得及明显耗散结构就已经达到了它的峰值响应。但对长时间载荷,阻尼非常重要,因为这些载荷连续不断的向结构加入能量。
在MSC.NASTRAN中,采用直接法进行频响分析时,其阻尼用阻尼矩阵代表,合并在刚度矩阵中。其阻尼矩阵由两部分组成,一部分为阻尼单元(粘性阻尼),一部分结构阻尼。因为求解域为复数域,允许刚度矩阵为复数,所以不必将结构阻尼转换为等效的粘性阻尼形式。对没有引入阻尼单元的结构,主要的阻尼输入就是结构阻尼。而对于结构阻尼的输入,一方面在材料属性输入时,会指定用这种材料的所有单元的结构阻尼;另一方面有一个直接输入的结构阻尼系数,这个结构阻尼系数G与结构的动力放大因子Q、结构的阻尼比ζ有如下关系:

对于结构的阻尼比ζ的计算一般是通过模态测试试验获取(固有频率、主振型、阻尼比等),此外还能通过幅频特性曲线,采用半功率法计算获取,半功率法计算阻尼的原理[12]如图5所示。
幅频特性曲线的共振峰两侧,可各找到一幅值为0.707Hm的点P1和P2,称为半功率点。这是因为在这两点时,系统的振动能量是共振时能量的一半。在小阻尼时,P1和P2对应的频率为:

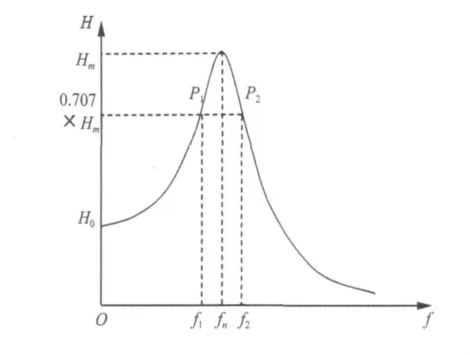
图5 半功率法计算阻尼原理图Fig.5 Acceleration response curve of 0.2 g input
令半功率带宽为:

故得:

本文中,先对反射镜组件进行了0.2 g特征扫频试验,通过反射镜组件的幅频特性曲线,采用半功率法获取了大孔径反射镜组件的结构阻尼。
本文只对水平沿镜头长边方向的分析结果与试验结果进行对比研究(其他两个方向的情况与之类似),因此,在下面的分析中只对这一个方向进行讨论(下同)。
反射镜组件0.2 g,10 Hz~2 000 Hz频段的特征扫频曲线如图6所示。

图6 0.2 g扫频加速度响应曲线Fig.6 Acceleration response curve of 0.2 g input
通过半功率法计算得到,反射镜组件在0.2 g载荷条件下,沿镜头长边方向的结构阻尼为0.015。
4 随机振动响应分析
4.1 基础随机激励载荷谱
空间光学遥感器随机振动环境以基础随机激励的加速度功率谱密度形式给出,对于反射镜组件随机振动载荷作用于反射镜三角板的底部。根据反射镜三角板与遥感器平台对接面上载荷谱的包络线和实际的电磁振动台激励频率限制的条件,施加的载荷谱如图7所示,频率范围为10 Hz~2 000 Hz,输入条件的均方根加速度为6.0 Grms。

图7 随机振动试验条件Fig.7 The test condition of random vibration
4.2 随机振动加速度响应分析结果
图8、图9分别为沿镜头长边方向,反射镜镜头上的加速度功率谱密度响应与累积均方根值。加速度功率谱密度均方根响应为16.0 Grms,放大倍数为2.7倍。

4.3 均值应力响应分析结果
图10、图11分别为沿镜头长边方向激励下,柔性支撑上的应力均方根响应与累积均方根值。反射镜柔性支撑结构上的均值应力响应分析结果为34.9 MPa。
5 试验结果
5.1 试验装置
为了验证反射镜支撑结构设计是否合理,并验证分析结果的正确性,对反射镜组件进行了随机振动试验,试验现场如图12所示。

图12 反射镜组件随机振动试验现场Fig.12 Placement of random vibration test
5.2 试验结果与分析
反射镜组件沿镜头长边方向的均方根加速度响应曲线如图13所示。均方根加速度响应为16.3 Grms。
反射镜柔性支撑结构在随机振动试验中的应变响应曲线如图14所示。

图13 加速响应功率谱密度(PSD)试验结果Fig.13 The test result of power spectrum density(PSD)of the acceleration response

图14 随机振动柔性支撑结构应变响应曲线Fig.14 Strain response curves of flexible support under random vibration
从试验获得的结果曲线可以看出,反射镜组件的均方根加速度响应为16.3 Grms,加速度放大倍数为2.7倍;柔性支撑在随机振动试验中的均值应力响应为31.3 MPa。试验结果与分析结果的对比分析表明:均方根加速度响应分析误差为1.8%,均值应力分析误差为13.2%,满足工程的精度要求。
由于随机振动测试结果存在一定的误差,会影响分析结果精度的计算,若要更加准确的评价分析结果的精度,须提高测试结果的精度。关广丰等人[13]的研究结果表明,可通过功率谱再现的自适应算法控制振动台,提高振动台的控制精度;游伟倩等人[14]提出了采用双振动台双自由度综合控制的算法,能将随机振动的的输出控制谱和参考普的误差控制在±1 dB以内。如何保证测试结果的精度是验证分析结果准确与否一个关键。
6 结论
大孔径反射镜的支撑结构在具有一定柔性的同时,能够抵抗发射段随机振动的干扰,是空间光学遥感器入轨后成像质量的重要保证。通过有限元分析技术,对反射镜组件进行了随机振动响应分析,可以预示反射镜柔性支撑结构经受动力学环境的能力,并验证大孔径反射镜支撑结构设计是否合理,为反射镜支撑结构的优化设计提供了理论支持;同时能有效的指导反射镜组件的随机振动试验的进行,预防在环境试验中出现质量事故。
本文利用有限元结构分析软件对某空间光学遥感器大孔径的反射镜组件进行了鉴定级的随机振动响应分析,得到了反射镜组件的均方根加速度响应与柔性支撑结构在随机振动试验中的均方根应力响应,试验结果表明:分析结果与试验结果基本吻合,分析结果对大孔径反射镜组件的优化设计具有一定的指导意义。
[1]李志来,薛栋林,张学军.长焦距大视场光学系统的光机结构设计[J].光学精密工程,2008,16(12):2485 -2490.
[2]韩昌元.高分辨力空间相机的光学系统研究[J].光学精密工程,2008,16(11):2164 -2172.
[3]鲍 赫,李志来.长条形SiC反射镜轻量化及支撑结构的设计[J].光学技术,2008,34(4):593 -596.
[4]闫 勇,王 栋,金 光.大孔径SiC反射镜组件研制技术[J].光电工程,2010,37(6):108 -112.
[5]郭 疆.大孔径空间遥感相机主反射镜支撑设计[J].光学 精密工程,2008,16(9):1642 -1647.
[6]王忠素,翟 岩,梅 贵,等.空间光学遥感器反射镜柔性支撑的设计[J].光学 精密工程,2010,18(8):1833-1841.
[7]孙宝玉.光学反射镜柔性支撑结构尺寸稳定性分析[J].光电工程,2009,36(9):142 -145.
[8]柯受全.卫星环境工程和模拟试验(下)[M].北京:宇航出版社,1996,23 -73.
[9]韩 旭,吴清文,董得义,等.室温硫化胶层建模在透镜结构分析中的应用[J].光学 精密工程,2010,18(1):118-125.
[10]张 军,谌 勇,张志谊,等.卫星随机试验的振动响应分析[J].机械强度,2006,28(1):16-19.
[11]MSC.Software Corporation.MSC.Nastran动力学培训教程[M].
[12]刘晶波,杜修力.结构动力学[M].北京:机械工业出版社,2005,60 -61.
[13]游伟倩,崔旭利,陈怀海,等.双振动台随机振动H∞双自由度综合控制研究[J].振动与冲击,2011,30(5):179-183,204.
[14]关广丰,王海涛,熊 伟.随机振动功率谱再现自适应控制算法研究[J].振动与冲击,2011,30(3):01 -04.
猜你喜欢
新能源科技(2022年9期)2022-11-20
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
环境技术(2020年1期)2020-03-06
北方工业大学学报(2019年5期)2019-03-30
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
制造技术与机床(2017年11期)2017-12-18
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
雷达学报(2017年1期)2017-05-17