
一种应用磁强计提高导航系统航向精度的方法*
2010-12-07 06:04吴美平王荔斌
传感器与微系统 2010年8期
管 斌,李 涛,吴美平,王荔斌
(1.国防科技大学机电工程与自动化学院,湖南长沙410073;2.中国人民解放军63999部队,北京100094)
0 引言
低成本SINS/GPS组合导航系统具有体积小、成本低等优点,可以应用于智能炮弹、制导炸弹、无人飞机、机器人等多种场合[1]。文献[2]通过理论分析与仿真实验说明了SINS/GPS组合导航系统中航向角误差的可观测性较差,当载体处于静止或匀速运动状态时,系统航向角误差无法有效收敛。文献[3]通过分段线性定常系统可观测性分析理论对15维状态的SINS/GPS组合导航滤波模型进行了可观测分析,结果表明:静止状态下航向角误差不可观测。
文献[4]提出了一种通过磁强计计算航向角并将之加入至系统的观测量中,与三维位置观测量构成系统四维观测量,从而构成MIMU/GPS/磁强计组合系统的方法,并通过可观测性分析说明了将磁强计加入至系统后系统的所有状态完全可观测。
本文采用磁强计与低成本SINS/GPS构成新的组合导航系统,利用SINS/GPS组合提供的水平姿态角与磁强计观测量,采用磁罗盘原理计算得到航向角,并作为组合导航系统新的观测量,以此改善航向角的可观测性,从而提高组合导航系统的航向精度。首先建立了系统完整的滤波模型,通过多组仿真实验对2种组合系统进行了对比,最后通过静态实验验证了本方法的有效性。
1 组合导航系统模型
1.1 捷联导航系统误差模型
在低成本系统的前提条件下,对文献[5]中所述捷联导航系统误差模型进行简化,得到姿态误差角方程

速度误差方程

位置误差方程
1.2 磁航向角的计算
通过SINS/GPS组合得到载体的横滚角φ和俯仰角θ,利用磁强计的测量信息[X Y Z]可以得到地球的磁场水平分量Xh与,如式(4)所示

航向角可根据式(5)得到
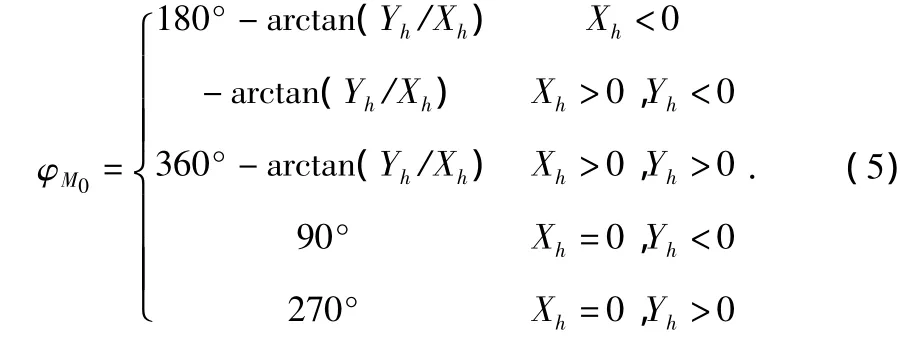
其中,φM0为磁航向角,经过磁偏角的修正后可以得到载体的航向角φM。
1.3 SINS/GPS组合滤波模型

选取量测向量为
由式(1)~式(3)与式(6)可以得到SINS/GPS组合滤波模型[7]

式中 W为6维状态噪声,由陀螺和加速度计噪声构成;V为6维观测噪声,由GPS观测噪声构成

1.4 SINS/GPS/磁强计组合滤波模型
将SINS解算得到的航向角φI与磁罗盘所得航向角φM之差增加为滤波器的一维观测量,即令量测向量为
由式(1)~式(3)与式(9)可以得到SINS/GPS/磁强计组合滤波模型

式中 状态方程与模型(7)中状态方程一致,且

2 仿真实验分析
为了分析SINS/GPS组合系统的航向角误差观测时存在的相关问题,并验证SINS/GPS/磁强计组合系统的有效性,在Simulink中对静止与匀速运动状态、正弦机动状态和正弦机动转匀速运动状态下的2种组合系统进行了系统仿真和比较分析,仿真参数如表1所示。
2.1 静止与匀速运动状态系统仿真
对静止与匀速运动状态下的SINS/GPS组合系统与SINS/GPS/磁强计组合系统进行仿真比较,系统姿态角误差曲线如图1所示(2种条件下结果一致,图中虚线代表SINS/GPS组合系统,实线代表SINS/GPS/磁强计组合系统,下同)。
由图可得,静止与匀速运动状态下2种组合系统的水平姿态角误差收敛效果一致,而SINS/GPS组合系统航向角误差不可收敛,与文献[2,3]中相关结论一致,SINS/GPS/磁强计组合系统的航向角误差可收敛至较小范围。仿真结果表明:在上述运动状态下,将磁强计加入SINS/GPS组合系统后,系统的航向角误差由不可收敛转为可有效收敛,说明了该方法的可行性。
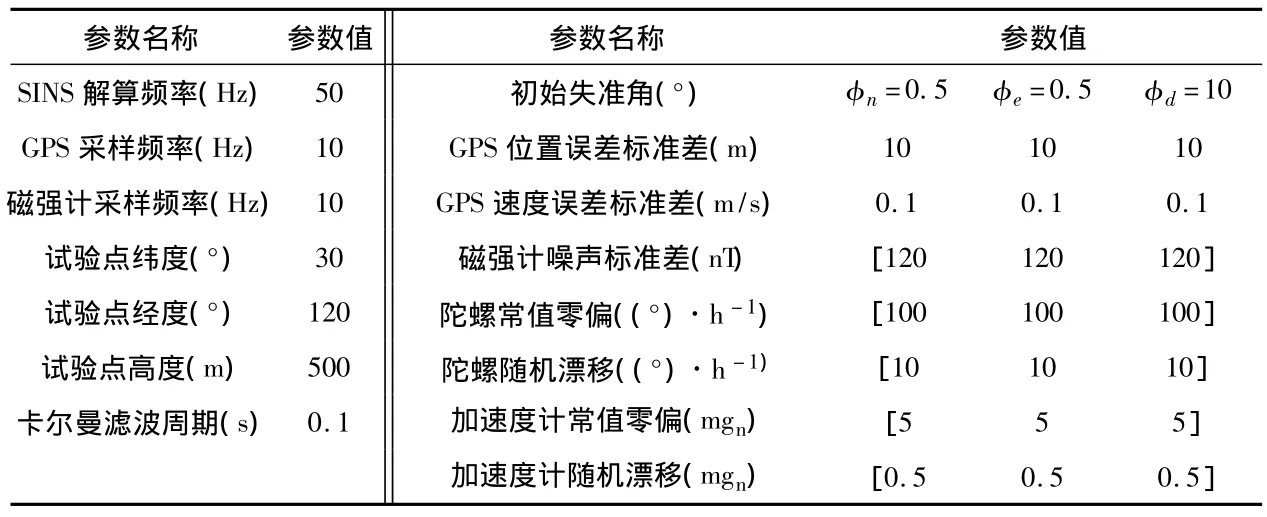
表1 仿真实验参数设定表Tab 1 Experiment parameters sheet of simulation

图1 静止状态姿态角误差曲线Fig 1 Attitude angle error curve under stationary state
2.2 正弦机动状态系统仿真
在正弦机动状态下,对2种组合系统进行仿真比较,系统姿态角误差曲线如图2所示。由图可得,在正弦机动状态下SINS/GPS组合系统的航向角误差可收敛,与文献[8,9]相关结论一致,其收敛效果与机动的效果相关,本组实验中航向角误差在270s时收敛至1°以内;SINS/GPS/磁强计组合系统的航向角误差收敛效果在正弦机动状态下与静止状态下一致。仿真结果进一步说明了SINS/GPS组合系统在机动条件下姿态角误差可观测,而在静止状态与匀速运动状态下不可观测的问题,说明了SINS/GPS/磁强计组合系统的有效性。

图2 正弦机动状态姿态角误差曲线Fig 2 Attitude angle error curve under sinusoidal movement
2.3 正弦机动转匀速运动系统仿真
为了分析真实运动条件下SINS/GPS/磁强计组合系统的有效性,本文设计了600 s时长的仿真实验,载体首先做正弦机动300s,然后匀速运动300s,此运动状态下的姿态角误差曲线如图3所示。

图3 正弦机动转匀速运动时的姿态角误差曲线Fig 3 Attitude angle error curve under sinusoidal mobile state turned to uniform motion
由图可得,对SINS/GPS组合系统,机动300 s结束时的航向角误差收敛至较小值,而当载体开始做匀速运动时,航向角误差开始增大,匀速运动300 s的过程中,系统航向角误差由1°变为8°;而对SINS/GPS/磁强计组合系统,系统的航向角误差始终收敛在0°附近。
仿真结果表明:对于SINS/GPS组合系统,大机动条件下系统的航向角误差可以收敛至小角度,当系统重新开始做匀速运动后,航向角误差开始发散;而SINS/GPS/磁强计组合系统姿态角误差一直收敛在较小角度;本实验说明了,将磁强计应用于低成本SINS/GPS组合系统能够提高系统航向角精度。
3 静态实验分析
为了进一步验证本文所提方法在实际应用中的有效性,在仿真试验的基础上,利用某型系统进行静态实验,该系统所用器件的性能指标如表2所示。

表2 系统性能指标Tab 2 System property index
实验方案:在有GPS信号的空旷环境下,将系统固定在稳定的平台上,系统上电并进行相关测试,确保 MIMU/GPS/磁强计输出数据有效,待系统捕获到足够的GPS信号后开始记录数据,采集数据10 min后系统下电。
利用所记录数据进行离线处理,通过模型式(10)解算得到的姿态角误差曲线如图4所示。由图可得,2种组合系统的水平姿态角误差收敛效果一致,而SINS/GPS组合系统的航向角误差发散,SINS/GPS/磁强计组合系统的航向角误差有效收敛。该静态实验验证了2.1节所做仿真实验的正确性,说明了本文所提出应用磁强计提高低成本SINS/GPS组合导航系统航向精度方法的有效性。实验结果表明:各状态均收敛时姿态角误差标准差为[0.064 6°0.0577°0.1955°]。

图4 静止状态姿态角误差曲线Fig 4 Attitude error under static state
4 结论
本文提出了一种应用磁强计提高低成本SINS/GPS组合导航系统航向精度的方法。给出了详细的系统滤波模型的同时,对低成本设备参数条件下的SINS/GPS组合导航系统与SINS/GPS/磁强计组合导航系统进行了数字仿真实验,仿真实验表明:由于惯性器件精度较低,在静止与匀速运动状态下,SINS/GPS组合导航系统航向角误差发散,而SINS/GPS/磁强计组合导航系统的航向角有效收敛。利用某型系统对本文方法在实际应用中有效性进行了验证,静态实验表明:在传感器精度较差的条件下,系统航向角误差仍可以有效收敛;长时间实验表明:系统收敛时的姿态角误差和误差的标准差均较小,说明了应用磁强计能够提高低成本SINS/GPS组合导航系统航向精度。
[1]祝燕华,蔡体菁,杨卓鹏.MEMS-IMU/GPS组合导航系统的实现[J].中国惯性技术学报,2009,17(5):552-561.
[2]李渊涛,陈 哲,刘 剑.SINS/GPS组合系统姿态角误差可观测性研究[J].北京航空航天大学学报,1999,25(3):367-370.
[3]孔星炜,郭美凤,董景新.MINS/GPS组合导航系统车载试验误差特性分析[J].中国惯性技术学报,2009,17(3):297-301.
[4]Laurent Wenger,Demoz Gebre Egziabher.System concepts and performance analysis of multi-sensor navigation systems for UAV applications[C]∥Proceedings of 2nd AIAA Unmanned Unlimited Systems,Technologies,and Operations.AIAA:San Diego,California,2003.
[5]Titterton D H,Weston JL.Strapdown inertial navigantion technology[M].Second Edition.Lexington,Massachusetts,USA:American Institute of Aeronautics and Astronautics,Inc,2004.
[6]Caruso M J.Applications of magnetic sensors for low cost compass systems[C]∥Proceedings of 2000 IEEE Position Location and Navigation Symposium.San Diego,California,2000.
[7]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[8]刘 准,陈 哲.局部可观测理论在INS/GPS机动对准中的应用[J].北京航空航天大学学报,2001,27(6):702-705.
[9]耿延睿,郭 伟,崔中兴,等.GPS/SINS系统空中对准姿态角误差可观测性研究[J].中国惯性技术学报,2004,12(1):37-42.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
西北工业大学学报(2022年2期)2022-05-11
新世纪智能(高一语文)(2021年3期)2021-07-16
装备制造技术(2020年3期)2020-12-25
空间科学学报(2020年4期)2020-04-22
燕山大学学报(2020年1期)2020-03-12
当代陕西(2019年12期)2019-07-12
民用飞机设计与研究(2019年4期)2019-05-21
汉语世界(The World of Chinese)(2019年1期)2019-03-18
传感器与微系统(2018年7期)2018-08-29
