
变电站巡检机器人GPS导航研究*
2010-12-07 06:04张彩友栾贻青
传感器与微系统 2010年8期
肖 鹏,张彩友,冯 华,栾贻青
(1.山东电力研究院国家电网电力机器人技术实验室,山东济南250002;2.浙江省电力公司嘉兴电力局,浙江 嘉兴314033)
0 引言
变电站巡检机器人是轮式移动机器人的一种,其能够以自主或遥控的方式,在无人值守或少人值守变电站对室外高压设备进行巡检,采集电力设备运行状态信息,及时发现电力设备的热缺陷、异物悬挂等设备异常现象,保证电力生产安全[1]。在导航方式上,变电站巡检机器人普遍采用磁轨迹导航,由安装于机器人前部的磁传感器阵列检测机器人相对于磁轨迹的偏移,通过两轮差速的方式控制其沿磁轨迹运行。在实际使用中发现,虽然该导航方式具有厘米级的导航定位精度,并且重复性好,抗干扰能力强,但其缺点是磁轨迹铺设工作量大,路线一旦确定就不能随意更改,并且,磁轨迹长期暴露于室外,室外环境会导致磁轨迹磁性减弱和开裂损坏;磁传感器检测距离较近造成机器人底盘较低,越障能力不强;另外,磁轨迹导航方式不能实时反馈当前机器人在变电站内所处的精确位置,不利于操作人员对机器人运行的远程监控。
目前,用于移动机器人较为成熟的导航方式除了磁轨迹导航外,还有惯性导航,激光导航,GPS导航和视觉[2],针对磁轨迹导航方式的不足,考虑到惯性导航定位数据是通过积分累加得到,导航精度会随时间推移而降低,不适合长时间精确定位,同时,室外环境对激光和视觉导航存在不利影响,而GPS导航则可直接从GPS接收机得知当前测点的绝对位置坐标,其动态定位精度最高可达厘米级,且不存在误差累积,理论上可以精确地得到变电站内任意位置的坐标,本文选择GPS导航作为磁轨迹导航的替代导航方式,论述了GPS导航在变电站巡检机器人应用中涉及的原理方法,并在变电站现场进行了测试。
1 巡检机器人GPS导航系统组成
随着GPS定位技术的发展,GPS定位在实时性和准确性方面都有很大提高,差分GPS定位以及实时动态测量(real time kinematics,RTK)技术的应用,使GPS具备厘米级动态定位精度,在定位精度上完全满足巡检机器人导航的要求。图1为巡检机器人GPS导航系统组成结构,系统中GPS基准站静止安放于空旷位置,GPS 移动站则安装于巡检机器人本体,数据链路负责将GPS基准站生成的差分数据传输至移动站,移动站采集GPS观测数据并结合接收到的差分数据,计算得到移动站天线中心处厘米级定位数据,然后,通过串口输出至导航控制系统控制巡检机器人运行。导航系统中移动站天线固定于机器人轮轴线中心,这样整个机器人的位置就可由移动站天线中心确定[3]。
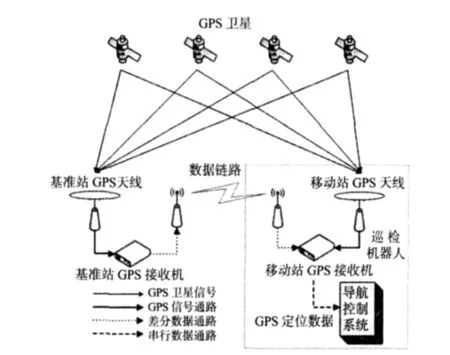
图1 巡检机器人GPS导航系统示意图Fig 1 Schematic diagram of GPS navigation system
2 巡检机器人GPS导航控制原理
为使巡检机器人在变电站内按照要求运行,首先必须知道其所要行走的路径信息,由于变电站内巡检路线中的路径绝大多数为直线,因此,本文将机器人运行路径均简化为直线路径,对于巡检路线中长距离转弯则可用几段直线路径代替,机器人导航控制就可归结为对机器人相对于当前运行路径的位置偏差Δs和航向偏差Δθ的控制。路径的起点和终点可利用GPS移动站的静态测量功能得到,各条路径相互连接就可以确定机器人的运行路线,路径点的顺序不同所定义的机器人的运行路线也就不同,这样,机器人的运行路线就可以灵活确定。实际导航时,利用GPS移动站实时输出的高精度定位数据,由导航控制系统处理后闭环控制机器人左右两轮速度,使其始终沿着预先设定的巡检路线运行。巡检机器人导航控制原理如图2所示。
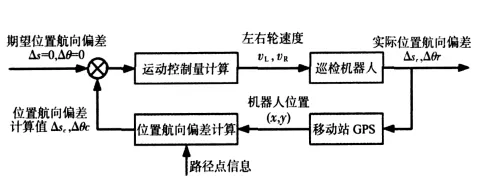
图2 巡检机器人导航控制原理图Fig 2 Navigation control principle of inspection robot
由于GPS定位数据均为WGS—84大地坐标系下的经纬度和高程数据,为方便GPS定位数据的处理,本文以基准站GPS天线中心为坐标原点,以经过坐标原点的WGS—84椭球法线为Z轴,X轴和Y轴分别指向东向和北向建立站心直角坐标系[4],GPS移动站输出的经纬度数据均转换至该坐标系下处理。另外,变电站地势均比较平坦,巡检机器人运行路线几乎都在同一平面内,因此,导航控制计算中舍弃了所得位置坐标在站心坐标系中Z轴数据,从而降低了导航控制算法的复杂性。巡检机器人导航过程中位置和航向偏差如图3所示。

图3 巡检机器人位置和航向偏差Fig 3 Position and course deviation of inspection robot
通过GPS移动站可得到机器人当前位置(x,y),而机器人航向θ则可由GPS输出位置数据推算得到。已知路径中心线起点P1(x1,y1)和终点P2(x2,y2),由以下两式可以求得机器人与行驶路径的位置偏差Δs和机器人航向与路径方向的偏差Δθ。
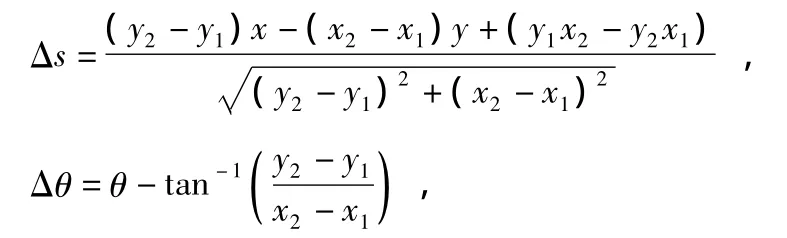
式中 θ=tan-1[(y-y-1)/(x-x-1)],(x-1,y-1)为前一个航向推算结束时得到的机器人位置坐标,参与Δθ计算的角度数据取值范围为[0°,360°),而Δs和Δθ的正负则反映了巡检机器人相对于运行路径是偏右还是偏左。
假定机器人运行速度为v,为了调整机器人运行姿态,可根据计算得到的Δs和Δθ,分别乘以系数Ks和Kθ(均为非负值,具体数值可由现场调试确定),就可得到机器人两轮的速度控制量增量

最终输出给左右两轮的运行速度vL和vR分别为

尽管GPS移动站也能输出机器人的航向,但本文中巡检机器人的航向却是由定位数据推算得到,这是因为在同等定位精度的情况下,航向推算中所用两定位点距离间隔越远,则推算得到的航向数据的波动越小,虽然这样会使航向数据的实时性降低,但采用这种方式,可以根据当前机器人运行状态(直线路径运行或转向),由导航控制程序灵活选择航向推算中两定位点之间的距离,在保证导航控制精度的前提下,提高机器人运行的稳定性。
3 巡检机器人GPS导航测试
为测试巡检机器人GPS导航效果和现场环境对GPS导航系统产生的影响,在变电站现场对导航系统进行了测试,测试均选择在天空卫星几何分布图形较好的时间段进行。测试使用了徕卡GPS1200系统,基准站和移动站均包含24通道准扼流圈天线和接收机,可同时处理GPS卫星播发的L1和L2波段数据,GPS移动站定位数据输出频率最高为20 Hz,RTK工作模式下其动态定位精度:平面为(10+1×10-6)mm,垂直为(20+1×10-6)mm[5]。
测试过程中的路径点分别定义为A,B,C,D,其定义的路径AB(BA)和BC(CB)段位于设备区外,CD(DC)段位于设备区内。机器人控制计算机通过解析GPS移动站输出的符合NMEA—0183格式的定位数据,得到机器人当前位置的经纬度坐标,再转换为站心坐标后控制机器人运行。为保证机器人运行安全,导航控制过程中同时检测移动站输出的GPS定位误差和跟踪卫星数,当定位精度超出厘米级或跟踪卫星数小于4颗(RTK初始化时需要跟踪至少5颗卫星,之后,则只需跟踪4颗卫星就可连续工作[6])时就立即控制机器人停止运动,等到定位精度恢复后再重新按照原路线继续运行。测试中机器人运行速度均为0.5 m/s,直线运行时大约每隔0.05 m推算一次航向,GPS移动站定位数据输出频率为10 Hz。
巡检机器人沿路径点ABCD运行记录得到的数据曲线如图4所示,其中,图中(c),(d),(e),(f)为机器人直线运行时记录得到的数据。

图4 沿路径点ABCD运行测试GPS导航数据图Fig 4 GPS navigation data map of movement test along ABCD
图4中,变电站设备区外GPS定位良好,BC段直线运行时 Δs均小于0.04m,经计算得到 Δθ方差为3.35 °;而设备区内CD段GPS定位受到干扰,在机器人运行轨迹上的干扰分布范围约为10 m,另外还存在一些零星的干扰点,由图4(b)可以看出:在采样点400~800和10000~12500的范围内,定位精度一直受较大影响,定位误差较大,机器人停止运动等待GPS定位数据恢复所需精度,由于此时定位误差导致航向推算仍在进行,航向角跳动剧烈,图4(e),(f)所示。
完成上述测试后,巡检机器人沿路径点DCBA返回至A点,此过程中得到的数据如图5所示,其中,图5(c),(d),(e),(f)同样为机器人直线运行时记录得到的数据。

图5 沿路径点DCBA运行测试GPS导航数据图Fig 5 GPS navigation data map of movement test along DCBA
而由图5则可以看出:机器人沿DCBA路径点运行过程中,GPS受干扰的区域明显较第1次测试多,且受干扰的位置也与第1次测试不同,从(a),(b),(c),(d)中可以看出:在整个DC段运行过程中GPS均受到较大的干扰,但在设备区外BC段直线运行时GPS定位精度与第1次测试所得结果基本一致(图5(b)采样点20 000之后),Δs小于0.025 m,Δθ方差为4.5°。
综合图4和图5,可以得出如下结论:
1)变电站设备区内GPS定位受干扰影响,受干扰时定位精度达到米级,由于2次测试受干扰的位置和范围不同,可知变电站设备区内GPS定位所受干扰具有随机性。
2)图4和图5(b)显示整个导航过程中GPS移动站跟踪卫星个数均不少于4颗;在GPS定位受严重干扰致使机器人停止运动之前跟踪卫星数存在减少的趋势,而在机器人静止等待定位精度恢复的过程中跟踪卫星数增加,但跟踪卫星数波动较大,RTK重新初始化时间较长。
3)图4(c),(d)和图5(e),(f)设备区外直线段运行时,机器人导航控制效果良好,位置偏差均小于0.05m,同时,机器人运行接近变电站设备区时,Δs和Δθ数据曲线波动出现增大的趋势。
4)遮挡、屏蔽、电磁干扰以及数据链路故障均可造成GPS移动站无法得到巡检机器人当前准确位置[7],通过现场测试发现设备区内数据链路工作正常,并且,由结论(2)知,两次测试中跟踪卫星数均满足RTK连续工作要求,甚至在机器人停止运行后有时仍能跟踪10颗卫星,综合上面的分析结果可以推断设备区内GPS无法准确定位的主要原因并非遮挡、屏蔽和数据链路故障,而是由设备区内电磁场干扰所引起。
4 结束语
本文论述了GPS导航在变电站巡检机器人应用中所涉及的原理和方法,并在变电站现场对导航系统进行了测试,为GPS在该领域内应用研究积累了经验。通过现场测试,虽然RTK可使GPS动态定位精度达到厘米级,但在变电站设备区内GPS导航容易受到随机性干扰,使其不能可靠连续地完成巡检机器人的导航任务。单一GPS导航不能满足巡检机器人变电站内精确、可靠连续运行的要求,因此,应考虑引入其他导航方式与GPS一起组成组合导航系统,在发挥GPS导航优势的同时,弥补单一GPS导航所存在的问题,另外,对于变电站内GPS受干扰的机理及相关应对措施,还有待今后做进一步研究。
[1]鲁守银,钱庆林,张 斌,等.变电站巡检机器人的研制[J].电力系统自动化,2006,30(13):94-98.
[2]王志文,郭 戈.移动机器人导航技术现状及展望[J].机器人,2003,25(5):470-474.
[3]Bouvet D,Garcia G.Improving the accuracy of dynamic localization systems using RTK GPSby identifying the GPSlatency[C]∥Proceedings of the 2000 IEEE International Conference on Robotics and Automation.2000:2525-2530.
[4]王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[5]Leica Geosystems AG.GPS1200 Technical Data[DB/OL].[2005—10—25].http:∥www.leica-geosystems.com.
[6]He Bo.Precise navigation for a 4WSmobile robot[J].Journal of Zhejiang University Science A,2006,7(2):185-193.
[7]罗永权.RTK在市政工程测量中的应用[J].测绘通报,2006(7):40-42.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
民用飞机设计与研究(2019年4期)2019-05-21
测控技术(2018年4期)2018-11-25
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
