
基于Kalman滤波的MEMS陀螺仪滤波算法
2010-09-03 11:56:56钱华明夏全喜阙兴涛
哈尔滨工程大学学报 2010年9期
钱华明,夏全喜,阙兴涛,张 强
(1.哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001;2.解放军信息工程大学 测绘学院,河南 郑州 450002)
微机电系统(micro-electro-mechanical system,MEMS)惯性器件在低成本惯性系统中获得越来越广泛的应用,但目前MEMS陀螺仪的精度仍然较低,限制了其进一步应用.通过有效的降噪方法改善陀螺仪性能,以满足较高精度的应用需求,是目前研究的重要问题.研究表明,随机噪声是影响MEMS陀螺仪精度的主要因素.对其进行模型辨识并滤波是提高陀螺仪性能的主要途径[1].采用神经网络、小波分析等方法对陀螺仪的随机误差进行建模可以达到这个目的,但这些方法得到的模型通常具有较高的阶数,并不十分适合于低成本系统的实时在线估计[2-3].通过时序分析方法,采用AR模型同样可以对陀螺随机误差进行建模,其使用条件要简单得多.在正确地建立了陀螺的随机误差模型之后需要选择恰当的方法进行滤波,从工程实用角度来看Kalman滤波是不错的选择.这种首先使用AR模型对陀螺仪随机误差进行建模,然后设计Kalman滤波器来滤除噪声的方法,文献[4-6]也曾使用,这些文献都对随机误差进行了正确建模,然而在Kalman滤波器的设计中,建立系统模型时,他们都没有区分实际角速度和噪声,在静态情况下,其滤波器可以有效消除随机噪声,但是在动态时,滤波器会出现问题.本文考虑了有色噪声的因素,采用状态扩增法设计了Kalman滤波器,为了验证其正确性,进行了仿真和试验.针对摇摆运动时滤波效果下降的问题提出提高采样频率和使用自适应Kalman滤波2种解决办法.
1 Kalman滤波器的设计
对陀螺仪随机漂移信号进行时间序列分析即对陀螺信号进行预处理后,使其满足平稳随机序列,对其建立时间序列模型,并对模型适用性进行检验,以实现对时间序列的预报和控制.具体的建模步骤以及方法可以参考文献[4,7].本文综合考虑AIC准则(Akaike information criterion)、模型适用性和系统实时性要求,选用AR(1)模型对陀螺仪随机噪声进行了建模.
Kalman滤波是工程应用中较为成熟的方法.它是一种递推线性最小方差估计,只通过前一个时刻的估计值和现在的量测值来计算现在状态的估计值,方法简单,易于工程实现.它可以实现最小均方估计误差意义下的随机信号的最优线性滤波.建立了陀螺仪的随机漂移模型以后,可以采用Kalman滤波方法滤除陀螺仪随机漂移.此处系统噪声为有色噪声,量测噪声为白噪声.在Kalman滤波方程中,系统驱动噪声和量测噪声都必须是白噪声,为了使用Kalman滤波器对数据进行处理,必须对滤波器模型进行改进[8].
系统噪声为有色噪声而量测噪声为白色时的Kalman滤波,一般可以采用状态扩增法.以离散系统为例来说明.
设系统方程和量测方程分别为

式中,观测噪声Vk是零均值白噪声序列,系统噪声wk-1为有色噪声,满足方程:

式中:ξk为零均值白噪声序列.
采用状态扩增法进行Kalman滤波方程的推导.将wk也列为状态,则扩增后的状态为
扩增状态后的系统方程和观测方程为
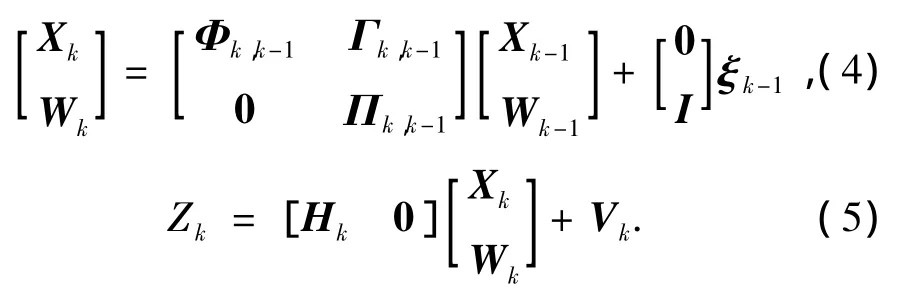
式中:Vk是零均值白噪声序列,符合Kalman基本滤波方程的要求,可以按照相关推导方法推导相应的滤波方程.
2 滤波器性能的检验
为了验证误差模型的准确性和滤波器的有效性,针对ADIS16350惯性测量组件进行了试验,该组件是一个包含有三轴陀螺仪和三轴加速度计惯性传感器,其零偏不稳定性分别是陀螺仪为0.015(°)/s,加速度计为0.7mg,测量噪声是 0.60(°)/s 和 35 mg.此处只对其中一个轴向上的陀螺仪进行分析研究.
2.1 静态试验
把惯导组件平放在地面上,保持静止,以100 Hz采样频率采集并保存1 min数据,然后进行离线分析.
由于陀螺仪的分辨率较低,不能敏感到地球自转角速度,此处可以把陀螺仪所采集的数据看作是误差,对其进行预处理然后进行建模.利用滑动平均法剔除陀螺仪的野值,采用逆序法进行平稳性检验,选取显著性水平为0.05,则|u|表明数据平稳,由采样数据算得u为0.110 4,表明数据无趋势项,满足平稳性要求;根据AIC准则对模型阶数进行选择,综合考虑硬件实现的方便,此处选择AR(1)模型;利用Matlab中“aryule”函数计算模型参数得 φ=0.107;最后,进行模型适用性检验,此处通过计算残差εn的自相关函数和xn与εn的互相关函数来完成.经计算,结果分别为0.052和 -0.085,满足为小量的要求,说明残差信号为白噪声,即证明所构建的AR(1)模型符合系统要求.
如图1所示,滤波后误差的均值和标准差分别由滤波前的 0.635 0(°)/s 和 -0.313 1(°)/s降低到0.086 9(°)/s和 -0.196 5(°)/s.结果显示,在静态条件下,Kalman滤波器可以大幅降低陀螺仪的随机噪声,对提高陀螺仪性能有显著作用.
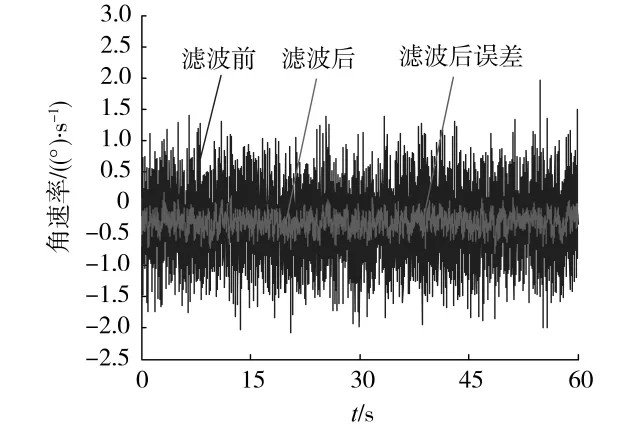
图1 静态试验结果Fig.1 Result of static test
2.2 速率试验
由于缺少转台等试验设备,此处进行速率试验的仿真.在所采集的静态数据的基础上叠加一个恒定的角速率来模拟速率试验.角速率值设定为2、5、10、100(°)/s.和静态数据一样,首先进行AR建模,然后使用Kalman滤波器滤波.如图2所示,滤波前后误差的均值和标准差数值与静止状态相同,说明在恒定角速率下,该滤波方法仍然适用.
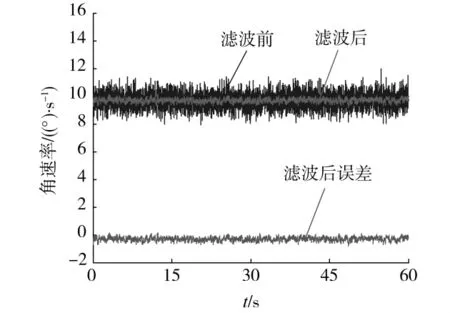
图2 速率试验结果(输入角速率为10(°)/s)Fig.2 Result of rate test(input angular rate is 10(°)/s)
2.3 摇摆试验
在所采集的静态数据基础上叠加一个正弦信号来模拟摇摆试验,分别以 5°、15°、50°、150°为振幅,10 s为周期进行仿真,所得结果见表1和表2.图3为振幅为50°时滤波前后的曲线图.

表1 摇摆试验角速率误差均值(100 Hz)Table 1 mean value of angular rate in the oscillating test(100 Hz)

表2 摇摆试验角速率误差标准差(100 Hz)Table 2 Standard deviation of angular rate in the oscillating test(100 Hz)
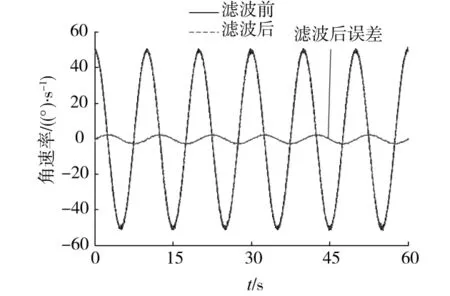
图3 摇摆试验结果(振幅为50°,采样频率为100 Hz)Fig.3 Result of oscillating test(amplitude is 50 °,sampling frequency is 100 Hz)
由表1、2中数据和图3可见,随着振幅的增大,误差均值和标准差逐渐增大,滤波器不再适用.其原因在于:在设计Kalman滤波器时,系统状态方程中Φk,k-1选为单位阵,这就隐含着默认角速率值在一个采样周期内没有明显变化,而摇摆环境下,这个假设不再成立.Kalman滤波虽然只通过前一个时刻的估计值和现在的量测值来计算现在状态的估计值,而因为上一个时刻的估计是利用上一时刻和以前的量测得到的,所以,实际上是利用前一时刻和以前的量测得到的.若系统做摇摆运动,各个时刻的真实角速率值不同,仍然用此模型会产生较大的误差,这也可以解释在恒定角速率转动和静态时滤波效果相同.
为了解决此问题,首先想到的办法是提高采样频率,此处仿真1 000 Hz采样频率下的滤波效果.所得结果见表3、4.图4所示为振幅为50°,摇摆周期为10 s,采样频率为1 000 Hz条件下仿真所得滤波效果曲线.
对比表1~4,可见提高采样频率后,误差的均值和标准差都有了显著下降,尤其是标准差下降最为明显,在任何振幅下都稳定在一个较低的水平.说明前面分析正确而且此方法有效.
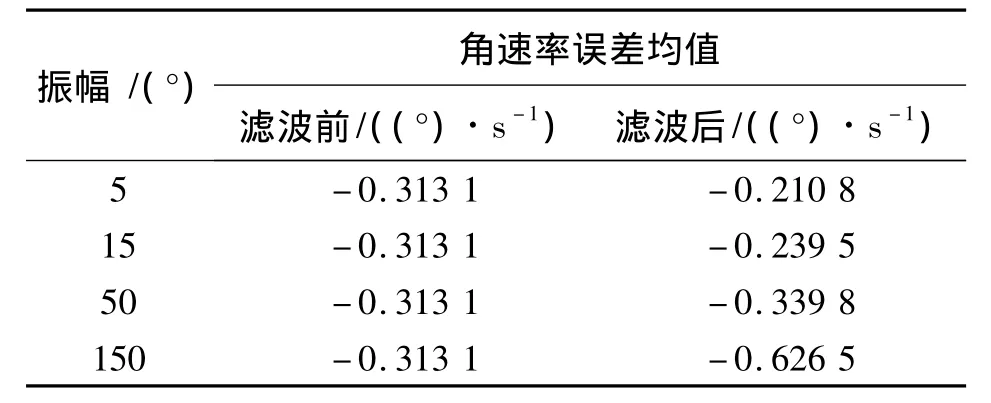
表3 摇摆试验角速率误差均值(1 000 Hz)Table 3 mean value of angular rate in the oscillating test(1 000 Hz)

表4 摇摆试验角速率误差标准差(1 000 Hz)Table 4 Standard deviation of angular rate in the oscillating test(1 000 Hz)
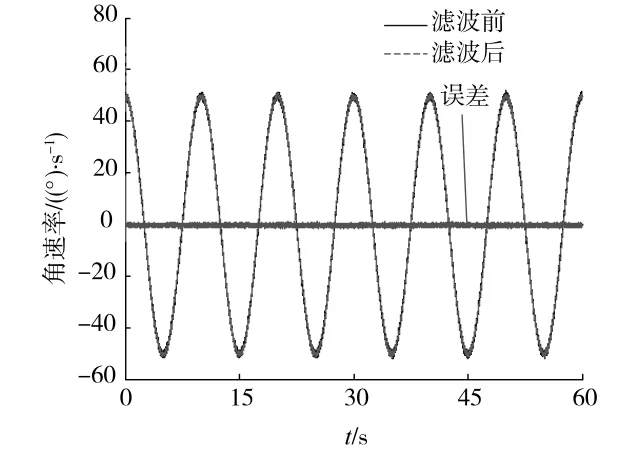
图4 摇摆试验结果(振幅为50°,采样频率为1 000 Hz)Fig.4 Result of oscillating test(amplitude is 50 °,sampling frequency is 1 000 Hz)
3 自适应Kalman滤波
2.3节证明通过提高采样频率可以有效改善滤波器效果,然而采样频率的提高对系统硬件及处理器计算能力提出了较高的要求,在现有条件下并不完全适用.
由前文可知,摇摆状态下滤波效果下降的原因是上一时刻状态的预测在状态估计中占有的比重太大.本文进一步提出利用渐消因子自适应Kalman滤波来进行改进,通过减小以往估计值在估计值中的比重来提高滤波效果.
自适应Kalman滤波方程描述如下[9]:

渐消因子α由先验知识来确定,此处通过改变α的大小进行仿真观察滤波效果来选择α的值.选择 α 为0.9、0.8、0.7 和0.6 来对比滤波前后误差的均值和标准差,仿真结果见表5和6.
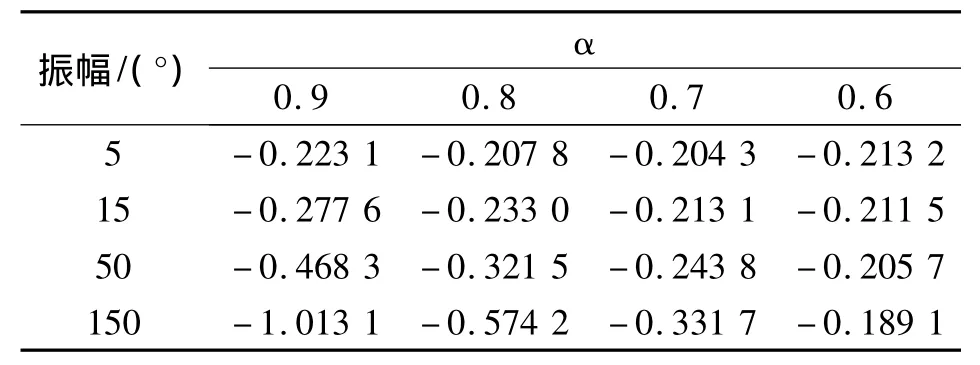
表5 摇摆试验角速率误差均值(自适应Kalman滤波100 Hz)Table 5 Mean value of angular rate in the oscillating test(adaptive Kalman filter 100 Hz)ALPHA

表6 摇摆试验角速率误差标准差(自适应Kalman滤波100 Hz)Table 6 Standard deviation of angular rate in the oscillating test(adaptive Kalman filter 100 Hz)ALPHA
由表中数据可见随着α值的减小,误差标准差逐渐趋于稳定,而其值逐渐增大,在均值方面,小振幅时α=0.7处有极小值,随后增大,大振幅时误差均值随着α的减小而减小.综合在小振幅和大振幅情况下误差均值和标准差的滤波效果,此处选择α=0.7作为固定的渐消因子.图5所示为α=0.7时滤波前后数据和滤波后误差曲线.

图5 摇摆试验结果(振幅为50°,采样频率为100 Hz,α =0.7)Fig.5 Oscillating test(amplitude is50°,sampling freqnency is 100 Hz,α =0.7)
4 结束语
本文对MEMS陀螺仪的随机误差特性进行研究,设计Kalman滤波器进行滤波,通过对ADIS16350的试验和仿真,以误差均值和标准差为衡量指标,验证了在静态和恒定角速率状态下,该方法可以有效提高陀螺仪精度.然而在摇摆情况下,滤波效果会随着振幅的增大而逐渐降低.通过分析原因,进一步提出了2种改进方案:提高采样频率和使用自适应Kalman滤波.仿真结果表明,2种方法都可以有效提高滤波效果,但是考虑到系统硬件实现中处理器计算速度和采样频率的限制,提高采样频率法并不十分可取,而自适应Kalman滤波有更高的实用价值.
[1]REN Yafei,KE Xizheng,LIU Yijie.MEMSgyroscope performance estimate based on Allan[C]//The Eighth International Conference on Electronic Measurement and Instruments(ICEMI2008).Xi'an,China,2008:1326-1330.
[2]CHEN Xiyuan.Modeling randomgyro driftby time series neural Networks and by traditionalmethod[C]//IEEE Int Conf Neural Networks & Signal Processing.Nanjing,China,2003:810-813.
[3]袁广民,李晓莹,常洪龙,等.MEMS陀螺随机误差补偿在提高姿态参照系统精度中的应用[J].西北工业大学学报,2008,26(6):777-781.YUAN Guangmin,LI Xiaoying,CHANG Honglong,et al.Compensating for randomnoises in a low-precision MEMS gyroscope for improving accuracy of attitude reference system[J].Journal of Northwestern Polytechnical University,2008,26(6):777-781.
[4]吉训生,王寿荣.MEMS陀螺仪随机漂移误差研究[J].宇航学报,2006,27(4):640-642.JI Xunsheng,WANG Shourong.The Research on randomdrift of MEMS gyroscope[J].Journal of Astronautics,2006,27(4):640-642.
[5]ZHANG Hua,KE Xizheng,JIAO Rong.Experimental research on feedback Kalman model of MEMS gyroscope[C]//The Eighth Int Conf on Electronic Measurement and Instruments.Xi'an,China,2007:253-256.
[6]ZHANG Yunong,LEITHEADwE,LEITH D J.Time-series Gaussian process regression based on computation of O(N2)operations and O(N)-level storage[C]//Proceedings of the 44th IEEE Conference on Decision and Control.Seville,Spain,2005:987-991.
[7]杨叔子,吴雅.时间序列分析的工程应用[M].武汉:华中理工大学出版社,2007:87-93.YANG Shuzi,WU Ya.Time series analysis in engineering application[M].Wuhan:Huazhong University Press,2007:87-93.
[8]付梦印,邓志红,张继伟.Kalman滤波理论及其在惯性导航系统中的应用[M].北京:科学出版社,2003:65-127.FU Mengyin,DENG Zhihong,ZHANG Jiwei.The theory of Kalman filter and the application of inertial navigation[M].Beijing:Science Press,2003:65-127.
[9]JIXunsheng,WANG Shourong,XU Yishen,et al.Application of the digital signal procession in the MEMS gyroscope de-drift[C]//Proceedings of the 1st IEEE International Conference on Nano/Micro Engineered and Molecular Systems.Zhuhai,China,2006:218-221.
[10]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998:33-41.QIN Yongyuan,ZHANG Hongyue,Wang Shuhua.Principle of Kalman filtering and integrate navigation [M].Xi'an:Northwestern Polytechnical University Press,1998:33-41.
[11]SEONG Y C,BYUNGD K.Adaptive IIR/FIR fusion filter and its application to the INS/GPS integrated system[J].Automatica,2008,44(8):2040-2047.
[12]耿延睿,崔中兴.组合导航系统卡尔曼滤波衰减因子自适应估计算法研究[J].中国惯性技术学,2001,9(4):8-10.GENG Yanrui,CUI Zhongxing.Adaptive estimation of Kalman filter fading factor in integrated navigation system[J].Journal of Chinese Inertial Technology,2001,9(4):8-10.
[13]熊海林,邓方林.陀螺静态漂移系数的两种估计方法[J].上海航天,2002,1:39-42.XIONG Hailin,DENG Fanglin.Two estimation methods of gyroscope static drift coefficients[J].Aerospace Shanghai,2002,1:39-42.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
当代医药论丛(2021年3期)2021-03-17 07:03:12
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
高中生学习·高三版(2016年1期)2016-05-30 05:45:06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:20
赤峰学院学报·自然科学版(2015年15期)2015-03-21 00:30:56
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:01
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:38
