
某中口径舰炮自动机设计思想与特点分析
2010-06-27 00:58:14冯德朝
火炮发射与控制学报 2010年2期
康 郦,冯德朝
(1.海军驻大连426厂军事代表室,辽宁大连 116005;2.海军驻郑州地区军事代表室,河南郑州 450052)
该舰炮自动机在设计上大胆地采用了常见于小口径火炮的炮身短后坐式自动机循环规律[1]。利用发条簧式动态平衡机和气液一体式驻退复进机实现了后坐复进运动的快速稳定。该自动机在机构循环运动的设计、后坐动能的利用、机构联锁的控制方式等方面都有许多先进、独到之处。较好地满足了现代舰炮高精度、高射速、轻型化、高可靠性的要求。
1 自动机运动循环规律的选择与实现
由于中大口径舰炮后坐能量大,后坐复进位移相对于小口径舰炮要大得多,自动机循环时间长,从而影响自动机发射率的提高。该型舰炮为了缩短自动机循环周期,提高理论发射率,采用了常见于小口径火炮的炮身短后坐式自动机循环规律和机构联锁武器逻辑控制方式,各个运动特征点控制简单可靠,且后坐长非常稳定[2]。对于中大口径舰炮来说,由于后坐动能较大,这种炮身短后坐式自动机循环规律难于实现。
1.1 从设计上尽量减小后坐部分的质量
该型舰炮采用了自紧炮身技术,不但提高了身管寿命,还有效地减小了后坐部分的质量。其身管水套采用纤维增强玻璃钢结构,不但提高了抗腐蚀性,还减轻了水套的质量。炮尾等后坐部分在结构上也十分紧凑,质量较小。该型舰炮后坐部分质量只有2 200 kg,这对于中大口径舰炮来说是非常小的。后坐部分质量的大小影响着最大自由后坐速度。最大自由后坐速度公式为[3]:

式中:W g为弹丸出炮口瞬间后坐部分自由后坐速度;Wmax为火药气体后效期结束时后坐部分最大自由后坐速度;F g为弹丸出炮口时的炮膛合力;ω为装药质量;t为火药气体后效期延续时间;b为火药气体后效期时间常数;v0为弹丸初速;m为弹丸质量;m h为后坐部分质量。
从最大自由后坐速度公式可以看出,在火药气体后效期能量一定的情况下,后坐部分质量减小可以使后坐部分获得较大的自由后坐速度,从而缩短后坐时间。在反后坐装置中,后坐阻尼力是后坐速度和漏口面积的函数。由于后坐速度较大,使反后坐装置从后坐初期就产生一个较大的阻力,以吸收较大的后坐动能。另一方面,后坐部分质量的减小也有利于快速完成复进运动。特别是在高射角射击时,较小的后坐质量不但可以减小后坐力的波动,还可有效减小舰炮复进时的阻力,有利于连发射击的稳定性。
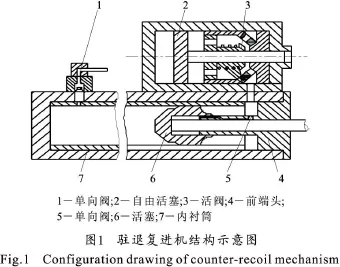
1.2 驻退复进机一体气液式反后坐装置
该型舰炮采用了驻退复进机一体、气液结合式反后坐装置,其结构见图1。
随着炮身后坐,复进机气体室内的气体被不断压缩,其压力逐渐增高,通过游动活塞反作用于制退液,使后坐阻力有逐渐增大的趋势,以抵消由于后坐速度逐渐减小对后坐阻力的影响,使后坐阻力的波动很小,其作用相当于1个蓄能器,在炮身后坐期间复进机气体室吸收并储存后坐动能,在后坐到位后用于后坐部分快速复进。另一方面,驻退机活塞衬筒变截面沟槽的横截面积在后坐的前期和中期变化比较平稳,有利于缩短后坐时间,变截面沟槽横截面积在炮身后坐后期迅速变小,有利于火炮快速制动。
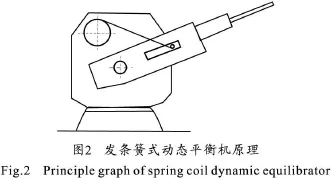
1.3 发条簧式动态平衡机的应用
该型舰炮创造性地使用了发条簧式动态平衡机,其结构及原理见图2和图3。

通过模型分析和计算可知[4]:
1)在舰炮射角从-15°到80°逐渐增大的过程中,重力矩和平衡机力矩的合力波动较小,舰炮俯仰部分的不平衡力矩随射角变化波动较小,实现了全射角平衡,有利于提高舰炮的瞄准精度和跟踪稳定性。
2)低射角时,重力沿后坐方向的分力G H较小;而平衡机沿后坐方向的分力F H较大,帮助炮身后坐;中射角时(30°<φ<60°)重力分力 GH及平衡机沿后坐方向的分力F H均处于中间值,F H在后坐初期帮助炮身后坐,后坐到一定长度FH改变方向,开始阻碍炮身后坐;高射角时FH和炮身后坐运动方向相反,始终阻碍炮身后坐。计算表明,炮身后坐过程中沿后坐方向的合力波动较小,后坐部分最大后坐长随射角的变化波动较小,只有2~3 mm。火炮发射率基本上不受射角变化的影响。保证和供弹速度的匹配,有利于实现高射速和自动化控制。
3)该型舰炮俯仰部分重心在耳轴前侧,炮身在后坐过程中重力对耳轴的力矩逐渐减小,随着炮身后坐,平衡机对火炮后坐部分的力矩也相应减小。射击过程中不平衡力矩波动较小,而且可以保证炮身后坐过程中不平衡力矩不改变方向,保持炮身后坐过程中的平衡。解决了传统火炮平衡机后坐复进不平衡问题。从而大大提高了火炮的跟踪精度和连发射击的稳定性,实现了全后坐长的平衡。
4)该发条簧式平衡机还具有结构简单紧凑,工作可靠,弹簧寿命长,易于实现等优点。在舰炮上应用后可有效减小舰炮后部尺寸,大大减小配重,大幅度降低火线高,有利于提高舰炮的射击精度并实现舰炮的轻型化。
2 自动机设计思想及特点分析
该型舰炮在快速射击时自动机循环时间较短,只有0.67 s,炮身极限后坐长只有530mm[5]。在这样短的后坐位移和后坐时间内要完成自动机一系列机构动作,在技术上有较大的难度和风险。该型舰炮利用先进的设计思想成功地解决了这些难题。下面对该型舰炮自动机设计思想及特点进行分析和总结。
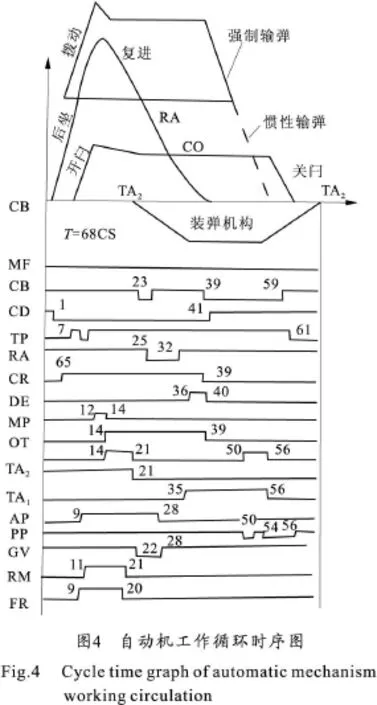
2.1 充分利用后坐能量,加大各机构动作的重叠时间
该自动机在设计上充分利用舰炮后坐部分的后坐能量,炮身后坐过程中完成了较多的机构动作,在0.1 s左右的后坐时间内快速完成了闩体开锁、收回机针、开闩、抽筒、拨动输弹机等一系列机构动作。复进过程只带动喷水气凸轮完成喷水和喷气动作,不再完成其他任何机构动作。几乎将全部储存的能量用于克服复进过程中的阻力,加速复进,大大缩短了复进时间。
在后坐过程中,许多机构动作重叠进行(如图4所示)。在后坐过程中,关闩发条簧吸收一部分后坐能量,用于输弹入膛后加速关闩,使关闩末速达5.6m◦s-1[6]。在后坐过程中,通过输弹机拨动臂拨动输弹机弹簧,储存了足够的能量,使输弹末速高达9.5m◦s-1。由于机构运动时间缩短,因而大大提高了自动机的理论发射率,该舰炮最大发射率达90发/分。
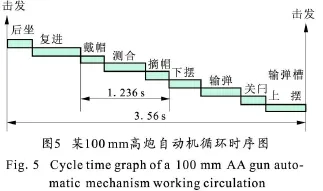
相比之下,某100 mm高炮自动机机构动作几乎没有重叠,见图5。后坐复进结束后才开始自动机其他机构动作,自动机循环时间为3.56 s,最大发射率只有16发/分。另一型130 mm舰炮自动机在后坐中不完成任何机构动作,其机构动作主要在复进过程中和复进到位后进行,而且其机构动作大都属于串联环节,几乎没有重叠时间。这种设计方式势必会延长自动机循环时间,其循环时间为4.8 s,最大发射率只有12发/分。
2.2 利用逻辑方程来控制和协调自动机各机构动作
利用逻辑方程来控制和协调自动机各机构动作,通过机电液一体式机构实现自动机各机构动作,这是该型舰炮自动机控制的最大特点之一。它不但代替了单一的机械联锁与保险机构,减小了自动机的结构尺寸与质量,还具有以下优点:
1)动作反应快,完成时间短。
2)逻辑控制用的传感器体积小,寿命长,工作可靠,安装方便。
3)传感器发出的逻辑信号可在一定的范围内作适当的调整。
4)可用逻辑电路或微机对机构动作进行管理,战时便于维修和故障定位。
5)便于对自动机工作状态进行监测,在射击时可用光电记录仪记录射击循环中16种逻辑信号的变化情况,便于根据实际情况进行调整。
2.3 与后坐部分相对独立的装弹排壳机构
该舰炮输弹线与排壳线重合。为此,设计了在运动上与后坐部分相对独立的“二位一体”式装弹排壳机构,如图6所示。
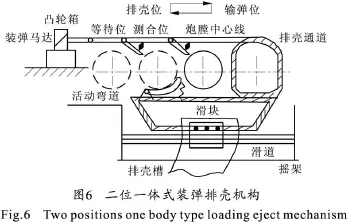
所谓“一体”就是装弹机构和排壳机构是一体的,二者同步运动。所谓“二位”即机构有两个位置,当机构到达输弹位时,输弹线与炮膛中心线重合,这时开始输弹;当机构返回排壳位时,排壳槽对准炮膛中心线,等待排壳。该机构的运动不是利用舰炮后坐能量,而是利用液压马达驱动,在运动关系上与后坐复进运动相对独立。液压马达由旋转电磁阀控制,电磁阀通电1次,液压马达旋转1周,驱动机构运动1个单向行程。电磁阀通电与否由装弹马达逻辑方程来控制。当方程条件满足时,产生1个电信号,使电磁阀通电。

式中逻辑信号的含义如表1所示。

表1 逻辑符号说明Tab.1 Logical symbol illustration
在工作时,OT1与OT2信号交替出现,OT1信号控制机构从排壳位向输弹位运动,OT2信号控制机构从输弹位返回排壳位,使供弹系统、发射系统和装弹排壳系统的机构运动相互协调,形成一个有机的整体。
2.4 先进的引信测合系统
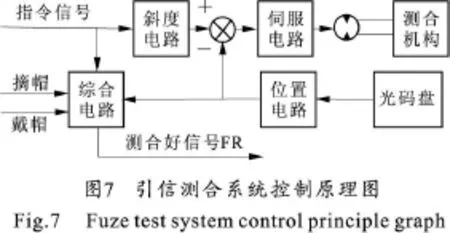
该炮引信测合机安装在供弹与自动机接口部位,供弹系统的炮弹先供到等待位,再由装弹机构从等待位推入测合位,完成测合后由装弹机构推入输弹线。该引信测合系统采用斜度信号控制原理实现了引信测合随动部分的平稳性[7]。由编码器和数字电路组成的位置反馈回路使系统省去了归零过程。不但避免了测合传动系统空回带来的系统误差,还大大缩短了测合时间,实现了引信测合的快速性,其控制原理如图7所示。
斜度电路把指挥仪来的指令信号变成一斜度信号,其斜度决定了马达的转速,特点是整个转动过程是匀速的,超调量十分小。位置电路由与测合马达相连的光电编码盘、计数器等组成,由它输出一个反映马达转角位置的电压信号。伺服电路把斜度信号与位置反馈信号进行比较,产生一个误差电压,控制马达转动。引信的戴帽与摘帽时机由与装弹马达同花键轴的凸轮控制,十分巧妙地解决了引信测合系统、供弹系统及发射系统间的协调问题,使之成为一个有机的整体。其整个测合过程重叠在装弹排壳机构运动过程中,不单独占用自动机循环时间。该测合系统测合速度非常快,测合360°角所用时间仅为0.42 s。
3 结 论
该炮采用机、电、液相结合的逻辑方式来控制发射系统各机构的运动特征点,协调发射系统各机构间的运动。在设计思想上与俄罗斯火炮主要依靠机械卡锁控制发射系统运动的方式有所不同。有效提高了自动机机构动作的重叠时间和反应速度,缩短了自动机循环时间,提高了理论射速。该发射系统还具有结构紧凑、质量小、能自动检测故障、便于监测发射系统工作状态等优点。
综上所述,该舰炮不仅在自动机循环原理的选择上,而且在自动机机构设计上以及在机构间的协调与控制上都有许多先进和独到之处,对于提高火炮设计与制造水平有较高的参考和借鉴价值。
[1] 马正清.浅析现代中口径舰炮的设计思想及其特点[J].一重技术,1993(3):25-30.M A Zheng-qing.Analysis of design thought and characteristic ofmodern m iddle caliber naval gun[J].CFH I Technology,1993(3):25-30.(in Chinese)
[2] 张志强.浅论单100mm舰炮发射系统[J].一重技术.1993(3):57-60.ZHANG Zhi-qiang.Analysis of 100mm naval gun fire system[J].CFH I Technology,1993(3):57-60.(in Chinese)
[3] 华恭,伊玲益.火炮自动机设计[M].北京.国防工业出版社,1976.HUA Gong,YI Ling-yi.Gun automatic mechanism design[M].Beijing:National Defence Industry Press,1976.(in Chinese)
[4] 康郦,胡月,朱承邦.新型舰炮平衡机的分析与计算[J].中国舰船研究,2009(2):73-77.KANG Li,HU Yue,ZHU Cheng-bang.Analysis and calculation of new type navalgun equilibrator.[J].Chinese Journal of Ship Research,2009(2):73-77.(in Chinese)
[5] 顾维群.现代舰炮的发展方向[J].一重技术.1993(3):22-24.GU Wei-qun.Development trend of modern naval gun[J].CFH I Technology,1993(3):22-24.(in Chinese)
[6] 康郦,马正清,游克全.一种适应高发射率火炮的开关闩机构运动分析[J].火炮发射与控制学报,1995(2):52-57.KANG Li,MA Zheng-qing,YOU Ke-quan.Analysis o f on-o ff bo lt mechanism movement accommodate to high fire rate gun[J].Journal of Gun Launch&Control,1995(2):52-57.(in Chinese)
[7] 赵同言.对现代火炮引信测合系统的研究[J].一重技术.1993(3):65-67.ZHAO Tong-yan.Research of modern gun fuze test system[J].CFH I Technology,1993(3):65-67.(in Chinese)
猜你喜欢
中国水利水电科学研究院学报(2023年1期)2023-03-14 04:57:18
舰船科学技术(2022年10期)2022-06-17 06:28:04
军事文摘(2021年16期)2021-11-05 08:49:08
军事文摘·科学少年(2021年8期)2021-09-10 21:28:31
数学物理学报(2021年3期)2021-07-19 06:02:50
探测与控制学报(2020年4期)2020-09-02 07:52:44
装备制造技术(2019年12期)2019-12-25 03:07:32
智富时代(2019年4期)2019-06-01 07:35:00
测井技术(2018年5期)2018-12-26 12:03:28
西北大学学报(自然科学版)(2018年2期)2018-04-18 06:53:55
