
平台式主惯导半实物模拟系统的研制
2010-06-05 09:14徐剑芸李群生庞秀枝
电光与控制 2010年1期
徐剑芸,鲁 浩,李群生,庞秀枝
(1.上海交通大学航空航天学院,上海 200240;2.中国空空导弹研究院,河南 洛阳 471009)
0 引言
空空导弹捷联惯导系统需要利用机载主惯导系统的输出信息进行空中传递对准,然后进行惯性导航,因此机载平台主惯导精度直接影响空空导弹惯导系统的对准和导航精度。捷联惯导系统是远程制导控制系统重要的组成部分,因此在飞行器的设计阶段必须进行充分的半实物仿真试验[1]。所以研制平台式主惯导半实物模拟系统,在实验室条件下完成导弹惯导系统对准和导航性能的评估。
本文从工程应用的角度出发,探讨了平台式主惯导系统模拟试验的原理,提出了一种实用的设计方法,搭建了平台式主惯导系统模拟系统,并在此基础上给出了半实物仿真试验的结果。
1 功能及组成
惯导系统是飞机的重要导航设备,主要提供飞机航向角、姿态角、速度、位置等信号[2]。平台式主惯导半实物模拟系统的功能是在实验室进行导弹飞控舱联试时,模拟真实的机载平台式惯导系统,实现主惯导有关的导航计算、参数装订和信息传递等[3]。
1)进行导弹飞控舱联试时,模拟平台式惯导系统的工作流程及工作精度,通过ARINC429或1533B数据总线传递各种导航参数及其他控制、状态信息,具有与真实惯导1#H/2#A相同的功能、性能和电气接口输入/输出特性。通过总线输出的导航参数有:
①即时经度、纬度,东向、北向速度,东向、北向加速度,时间,状态字;
②真航向、偏流角、航迹角、预定航迹角;
③横滚角、俯仰角,航向、横滚、俯仰角速率,进动角速率;
④偏航距,待飞时间、待飞距离。
2)根据主惯导的几种对准方式,系统按蒙特卡罗方法自动产生导航误差,并实时仿真模拟主惯导的导航计算。
3)模拟系统工作后,可通过显示器上的人机界面及控制键盘的操作,完成下列功能:
①控制导航进程(即纯惯、惯性/GPS组合选择及导航计算起始时间的控制),并根据导航进程配以相应的导航误差;
②实时显示模拟系统的工作状态信息、导航参数及相应的导航参数误差;
③可通过航路点的设入,以改航的方式改变飞行轨迹;
④可仿真飞行操作,改变飞行速度及飞行航向与姿态。
4)可通过RS232接口或其他总线接口接收外部飞行轨迹发生器的飞行轨迹参数。在无外部输入的情况下模拟系统自动产生飞行轨迹数据。
5)可通过模拟系统面板上的“导弹准备”按钮,实现记录器的“0”秒计时。
6)可通过模拟系统控制面板上的电压表、电流表监测外部供电电源的工作情况。
2 硬件设计
本着设计系统化、功能化以及易于扩展和提高系统的可靠性、可维护性的原则,选用成熟的设计。模拟系统中主要设计一些电路,用来完成对输入信号的调理、输出信号的放大。在其面板上有各种开关和工作状态的指示灯等。图1为平台式主惯导半实物模拟系统原理框图。
平台式主惯导半实物模拟系统分为1#H惯导系统和2#A惯导系统,二者相互兼容,但不同时工作。其工作状态在模拟系统上电后由控制面板上的开关所置位置来决定,即开关拨到“1#H”档,1#H惯导模拟系统工作;如开关拨到“2#A”档,则2#A惯导模拟系统工作。
平台式主惯导半实物模拟系统的仿真精度由菜单上的对准方式控制。若对准方式选择“正常对准”,则对应的仿真精度为惯导系统在正常陀螺罗经对准方式下的导航精度;选择“快速对准”或“存贮航向”,则对应的仿真精度为惯导系统在快速陀螺罗经对准方式或存贮航向对准方式下的导航精度。
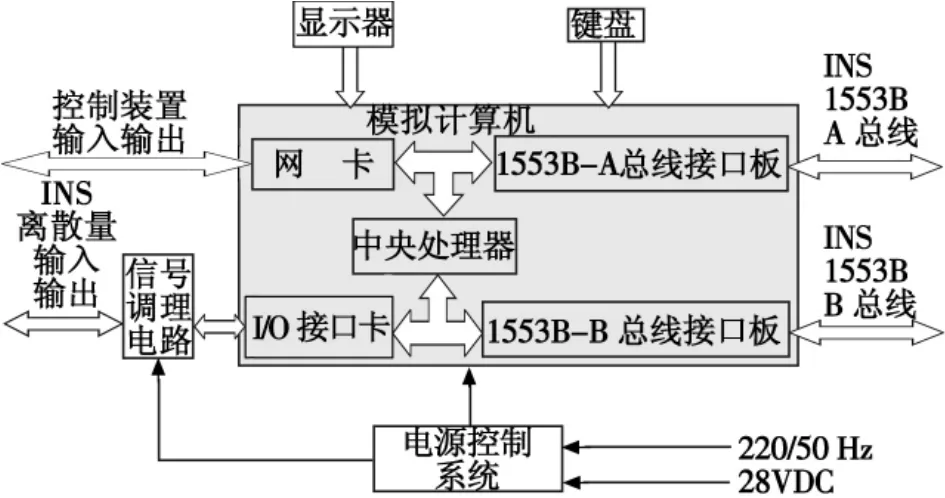
图1 平台式主惯导半实物模拟系统原理框图Fig.1 Schematic diagram of semi-physical simulation system for INS
1)主控机一台,包含多种板卡,主要有 ARINC 429总线接口板(一个接收通道,一个发送通道);1553B双通道总线接口板。
2)主惯导模拟系统一套,包含模拟系统用工控机一台(主要包括ARINC 429总线接口,一个接收通道,一个发送通道;1553B总线接口,双通道;I/O接口,8路离散量输入,8路离散量输出);机柜及控制面板,通过控制面板实现对模拟系统的断/开控制及状态控制等。
3 软件设计
3.1 平台式主惯导半实物模拟系统工作流程
平台式主惯导半实物模拟系统控制与工作流程如图2所示。
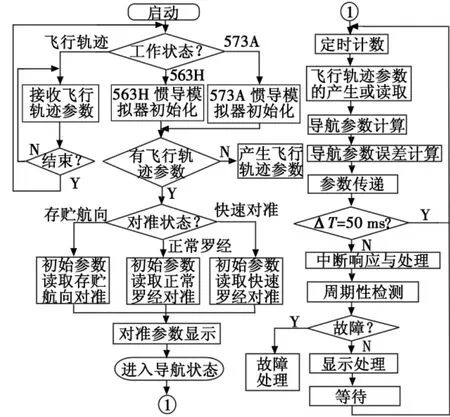
图2 平台式主惯导半实物模拟系统控制与工作流程图Fig.2 Controlling and working flow chart of semi-physical simulation system for INS
3.2 软件模块的划分
模拟系统软件按照软件工程化思想,采用自顶向下、按功能划分模块的方法,以模块化形式设计模拟系统软件。整个模拟系统软件分为8个模块,各模块的功能如下:
1)初始化及底层驱动模块,完成模拟系统硬件(如ARINC 429总线、1553B总线、I/O离散量口等)、软件的初始化设置与控制;
2)管理模块,管理软件的功能是根据控制命令管理整个火控软件的流程;
3)总线对外交联通讯模块,采用ARINC 429总线或1553B总线及RS 232对外发送和接收导航参数、飞行轨迹参数,接收主控机的控制命令,完成惯导模拟系统数据的输入与输出;
4)控制模块,接收离散量输入、导航进程控制等各种导航控制命令,执行模拟系统对准/导航任务进程的调度及参数的更新,完成中断控制、显示控制和状态控制;
5)对准/导航参数计算模块,仿真真实惯导系统的计算步骤,执行导航参数计算;
6)导航参数误差计算模块,根据真实惯导系统的误差模型、飞行轨迹参数及导航进程,实时计算产生导航参数误差;
7)飞行轨迹参数产生模块,在无外部飞行轨迹参数输入的情况下,模拟系统自动产生飞行轨迹参数;
8)参数显示模块,根据控制模块指令或人机界面操作指令,执行导航参数、导航参数误差及各种状态、提示信息的显示。
4 飞行轨迹的设计
标准轨迹是根据某型飞机的典型机动动作设计的飞行轨迹。飞行轨迹中包含每一飞行阶段的起始时间和终止时间、飞机加速度、角度变化率、陀螺漂移、加速度计零位漂移,按飞行轨迹及时间顺序进行每一飞行阶段参数定义,用户不能更改。
用户自定义飞行轨迹存储于专用数据文件中,用户可在运行仿真程序前用编辑软件打开数据文件进行轨迹参数的修改,当仿真试验时,运行至相应进程进行标准轨迹和自定义飞行轨迹选择。
4.1 飞行过程用到的坐标系
飞行过程中用到的主要有导航坐标系(n系)、轨迹坐标系(t系)、轨迹水平坐标系(h系)、机体坐标系(b系)。导航坐标系原点位于载机惯性导航系统的几何中心,OX轴指北;OY轴的方向向上;XYZ构成右手坐标系。
坐标系间的转换关系为:n系绕Zn轴转(90°-θ),然后绕Xn轴转-90°得h系;h系绕Zh轴转-θ角得t系;t系绕Xt轴转γ角得b系。
4.2 飞行轨迹设计
飞行轨迹设计应尽可能接近实际情况,包括各种典型的机动动作,以充分反映主惯导系统在各种机动情况下的性能。典型飞行轨迹分为飞机爬升过程、转弯过程、俯冲过程。
4.2.1 飞机的爬升过程
飞机爬升过程分为3个阶段:改变俯仰角的拉起阶段、等角爬升阶段和结束爬升的改平阶段。
1)拉起阶段。
在该阶段,飞机轨迹俯仰角以等角速度逐渐增加到等角爬升的角度。设角速度为15(°)/s,该阶段的初始时刻为t01,则有:

2)等角爬升阶段。
设飞机以恒定俯仰角30°爬升到需要的高度,则有:

3)改平阶段。
此阶段飞机以等角速度15(°)/s减小俯仰角,该阶段的初始时刻为t02,则有:

4.2.2 转弯过程
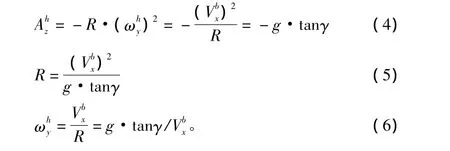
设飞机为协调转弯,转弯过程无侧滑,飞行轨迹在水平面内。以右转弯为例分析协调转弯过程中的转弯半径和转弯角速度。设转弯过程中倾斜角为γ,飞机速度为,转弯半径为R,转弯角速率为,转弯所需向心力,由升力因倾斜产生的水平分量来提供,则有:
飞机转弯分3个阶段:由平飞改变倾斜角的进入转弯阶段、保持倾斜角以等角速度转弯阶段和转弯后的改平阶段。
1)进入转弯阶段。
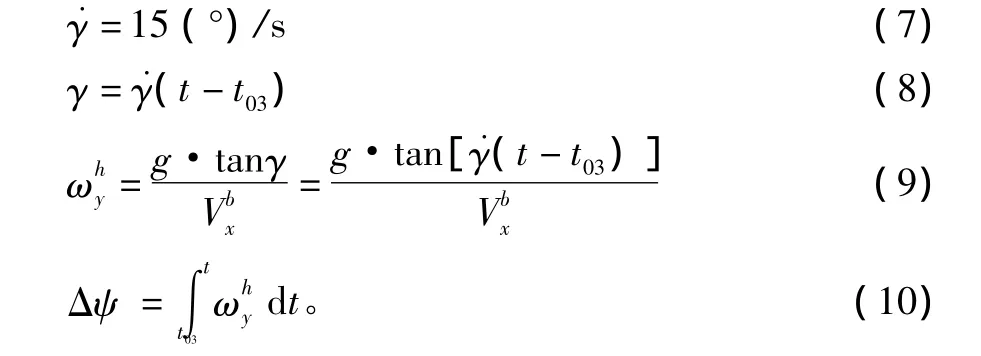
设飞机以等角速度15(°)/s将倾斜角调整到所需要的值,该阶段的初始时刻为t03,则有:
2)等角速度转弯阶段。
飞机保持倾斜角,以等角速度转弯,有:γ=γc=常数=常数。
3)改平阶段。
该阶段的初始时刻为t04,则有:

4.2.3 俯冲过程
俯冲过程的飞行轨迹在地垂面内,俯仰角的改变方向与爬升过程相反,分为改变姿态进入俯冲、持续俯冲、俯冲后的改平3个阶段。
1)进入俯冲阶段。
设飞机俯仰角以等角速度15(°)/s逐渐增加到所需的俯冲角。该阶段的初始时刻为t05,则有:

2)持续俯冲阶段。
设飞机以恒定俯仰角(-30°)持续俯冲到需要的高度,则有:

3)改平阶段。
此阶段飞机俯仰角以等角速度15(°)/s减小俯仰角,该阶段的初始时刻为t06,则有:

4.3 导航参数及其误差计算
根据飞机轨迹求取所需各种导航参数,如飞机机动飞行时在轨迹坐标系下的加速度、速度等,根据前述坐标转换关系分别求取在导航系、平台系、机体系下的加速度、速度,机体的角速率(相对惯性空间)等参数。
设计的陀螺漂移模型为均方差α(°)/h的一阶马尔可夫(相关时间1 h),加速度计的零位偏差简化为均方差为 β 的白噪声,α 为 0.03(°)/h,β 为 1 ×10-4g。根据飞行轨迹参数及导航进程计算飞机纬度、经度误差,速度、姿态等误差参数,在这里其详细求解过程就不赘述。系统实时计算产生导航参数误差,并进行实时显示。导航进程控制的目的是快速模拟机载主惯导在导弹发射准备前的工作过程,为发射前时刻准备好主惯导的初始误差。图3所示为仿真试验中实时显示的导航参数图。
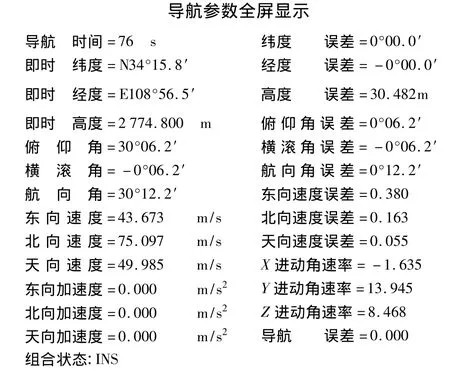
图3 仿真试验中实时显示的导航参数Fig.3 Navigation parameters of simulation test displayed in real time
5 应用结果
机动飞行的轨迹与传递对准精度有着十分密切的关系,因为飞行轨迹对状态变量的可观性有直接影响。仿真过程中需要结合多种机动方式进行传递对准解算,并对滤波精度进行分析比较,从中选出最优的轨迹,供实际飞行时参考[4]。应用本文设计方案的平台式惯导模拟系统进行对准导航半实物仿真试验,为试验室条件下对准算法、导航算法等的研究提供了极大的方便。表1是某次仿真试验模拟在正常罗经对准时平台式1#H惯导系统的误差。
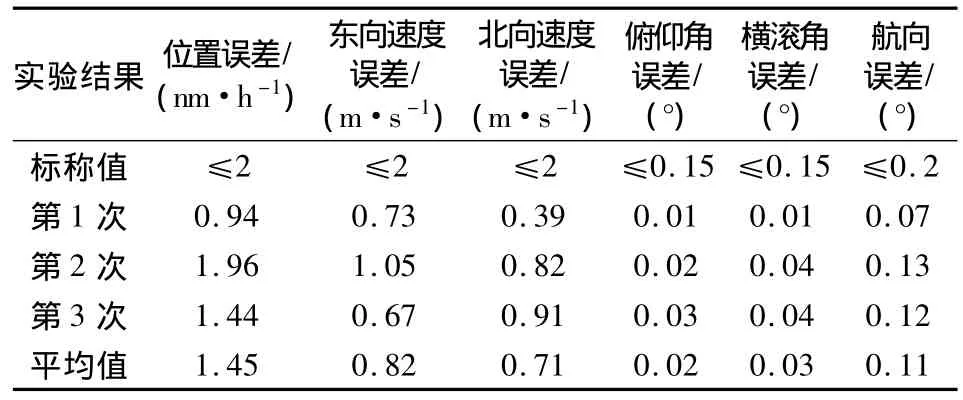
表1 模拟在正常罗经对准时1#H系统时的误差Table 1 Simulating error of 1#H system on compass alignment
当仿真实验完成后用户可以对生成的数据进行查看,运行专用软件,选择相应的菜单,将会显示数据文件列表,然后键入所需要查看的数据文件名称,计算机将以图形方式显示数据,共6个图形(飞行轨迹图、经纬度误差图、速度误差图、俯仰角误差图、横滚角误差图和真航向误差图)。
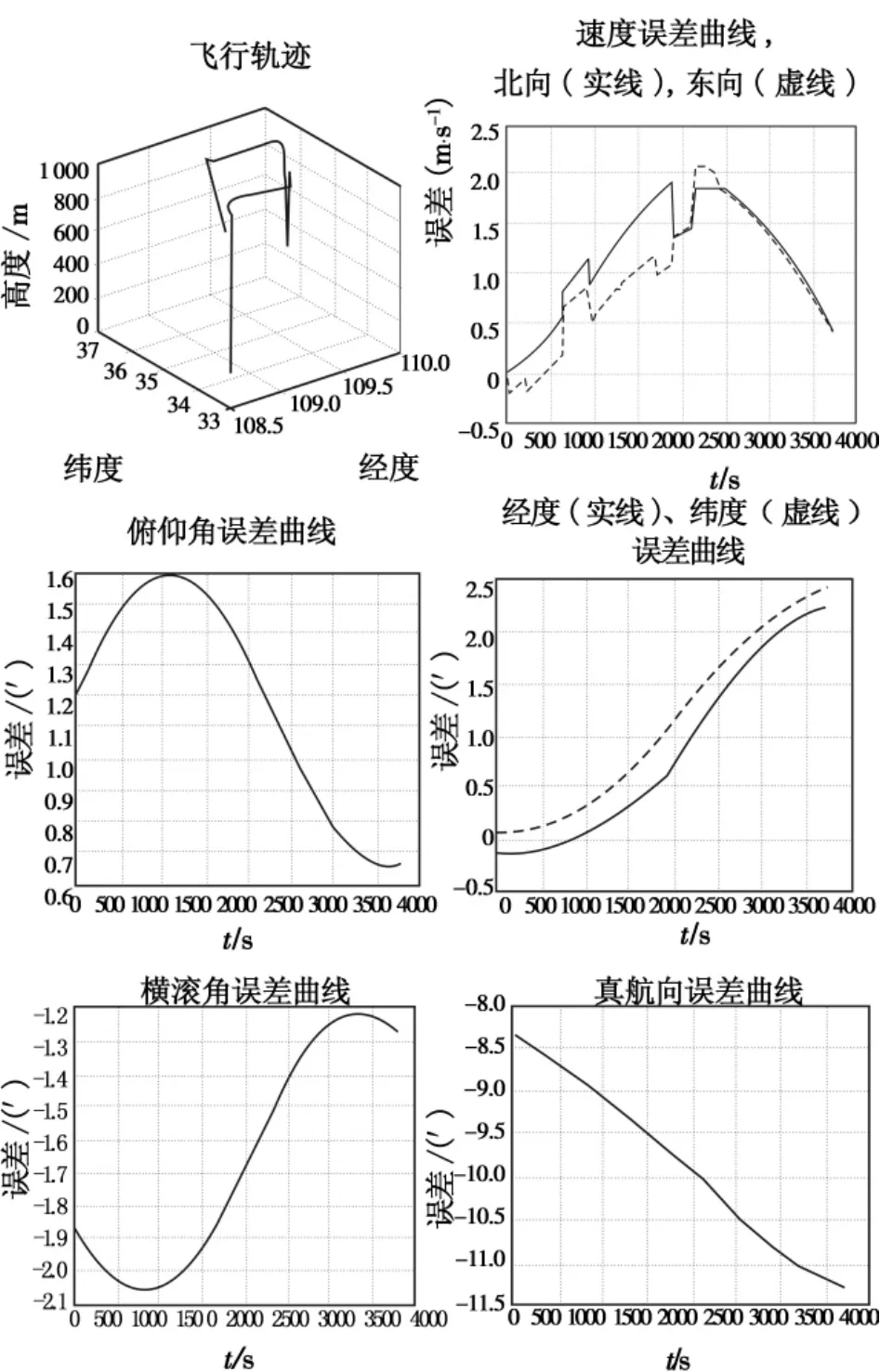
图4 1#H纯惯导导航1 h仿真结果Fig.4 Simulation result of 1#H INS for one hour
图4为平台式主惯导模拟系统仿真图形,使用者可根据需要打印误差曲线。
6 结论
本文从工程应用的角度提出了平台式主惯导半实物模拟系统的设计,目前所研发的模拟系统已得到了应用,性能稳定可靠,表明平台式主惯导半实物模拟系统的设计是可行的和实用的。
通过改变飞行轨迹的数据文件,可实现在实验室中主子惯导系统多种对准导航算法研究,该项技术还需要进一步的工程优化,以推广应用到其他战术导弹惯导系统的仿真试验中。
[1]李涛,李兴玮.一种惯性导航系统半实物仿真方案[J].计算机仿真,2005(1):55-57.
[2]卢建华,张建军,徐庆九.惯导自动检测设备平台模拟器的研制[J].电光与控制,2005,12(3):77-80.
[3]鲁浩,徐世杰,徐剑芸.惯导系统传递对准精度实验的半物理仿真方案[J].测试技术学报,2007(3):225-231.
[4]钱伟行,刘建业,赵伟,等.平台式/捷联式惯导传递对准仿真平台的实现[J].系统工程与电子技术,2007(5):797-799.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
测控技术(2018年2期)2018-12-09
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2018年1期)2018-04-04
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
探测与控制学报(2015年4期)2015-12-15
焊接(2015年1期)2015-07-18
