
海洋环境对吊放声纳作战使用影响研究
2010-03-24 02:39
海军航空大学学报 2010年1期
(解放军总参谋部水文气象局,北京 100083)
在现代反潜技术中,航空反潜以其具有速度快、搜索范围广、机动灵活、不易受攻击、作战效率高等优势,受到世界各国海军重视,吊放声纳是反潜直升机的主要反潜装备,具有被动和主动两种工作状态,其对潜探测能力与装备的战技性能、作战海域海洋环境因素、潜艇目标特性、反潜战术应用等有关[1]。通过对作战海域海洋环境因素的分析,为合理选择吊放声纳的工作深度、科学评估吊放声纳对潜探测距离提供依据。
1 声纳方程
主动和被动声纳方程可分别表示如下[2]:

式(1)、(2)中:各项均以分贝数(dB)表示。其中,TL表示传播损失;SL表示发射声源级;SL1为潜艇辐射噪声的声源级;NL表示背景噪声级,包括海洋环境、混响和舰艇的自噪声等;DT表示声纳设备的检测阈,即判断有信号时所必须的最小信噪比;DI表示声纳设备的指向性指数;TS表示目标强度,即反映声波照射到潜艇以后反射回去的能力。
由传播损失与探测距离的关系式,可以推导出声纳探测距离r[1],即:
主动声纳探测距离为:

被动声纳探测距离为:


探测距离是指声纳在一定条件下,能有效地发现目标并测量目标的最大距离,是表示吊放声纳对潜探测能力的主要指标。
2 海况对吊放声纳工作深度的影响
在不同海洋环境条件下,吊放声纳探测深度和声纳浮标悬浮深度是决定声纳探测效能的一个重要因素。吊放声纳的缆长一般小于450 m,声纳浮标一般有3个悬浮深度段位(如30 m、50 m、150 m)。可根据声速的垂直分布梯度的拐点来决定吊放声纳和声纳浮标的最佳探测深度;浅海条件下,确定海深中点为最佳探测深度。图1所示为正声速梯度声速分布剖面时,吊放声纳的最佳探测深度取100 m,声纳浮标的最佳探测深度为50 m 或150 m。图2所示为反声道声速分布剖面时,吊放声纳最佳探测深度取136 m,声纳浮标的最佳探测深度为150 m。
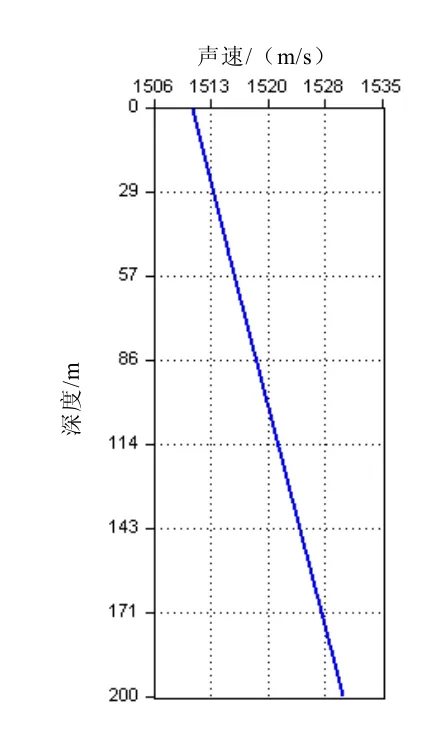
图1 正声速梯度声速分布剖面
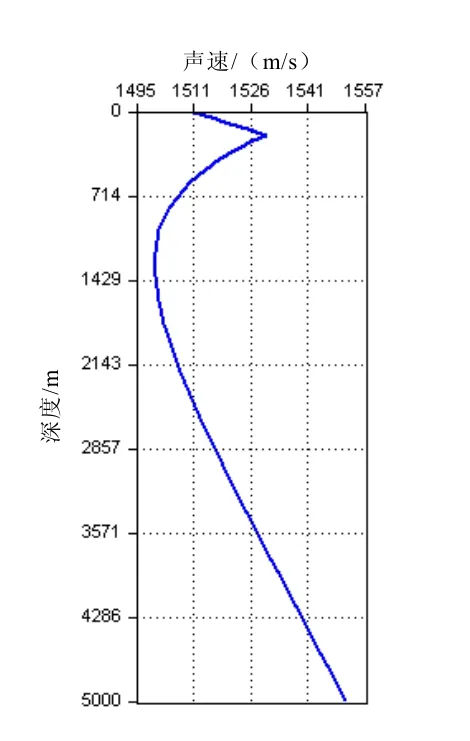
图2 反声道声速分布剖面
3 海洋环境噪声对吊放声纳探测能力的影响
海洋环境噪声是声纳探测的一种干扰背景声场,其产生因素是多种多样的,通常包括潮汐、涌浪所引起的压力波、湍流引起的压力脉动、地震活动、分子热运动、海洋中生物的群体活动,以及近海湾或港口处工业活动引起的人为噪声、进出港口船只的噪声等。海洋环境噪声及其频谱分布特征的准确值通过实际测量得到,是随时域—频域—空域变化的量。在估计吊放声纳探测能力过程中,一般利用一些数值模型(ANDES模型和AMBENT模型等)进行计算,也可通过参考一些实际测量曲线获得,还可借助某些经验模型进行测算。本文由下列经验公式计算浅海中海洋环境噪声级[3-5]。

由上式可知,海洋环境噪声级由声信号发射频率f /kHz 和海况等级S (S=0,1,2,…,9)决定。
将海洋环境噪声级公式代入主/被动声纳作用模型,可仿真分析海洋环境参数(海况等级S)与主/被动声纳作用距离之间的关系。
4 仿真
仿真1:海况对主动声纳探测能力的影响。设主动声纳信号声源级为230 dB,接收机检测阈值为12 dB,接收指向性指数8 dB,目标强度20 dB,水深250 m,混合层深度50 m,换能器发射深度为80 m,接收深度为80 m,Tρ的取值为每反射一次衰减3 dB,声速梯度0.017/s,声速1 500 m/s,KL的取值为4 dB。当发射频率为5 kHz,海况从0级到9级变化时,主动声纳有效探测范围变化曲线见图3。
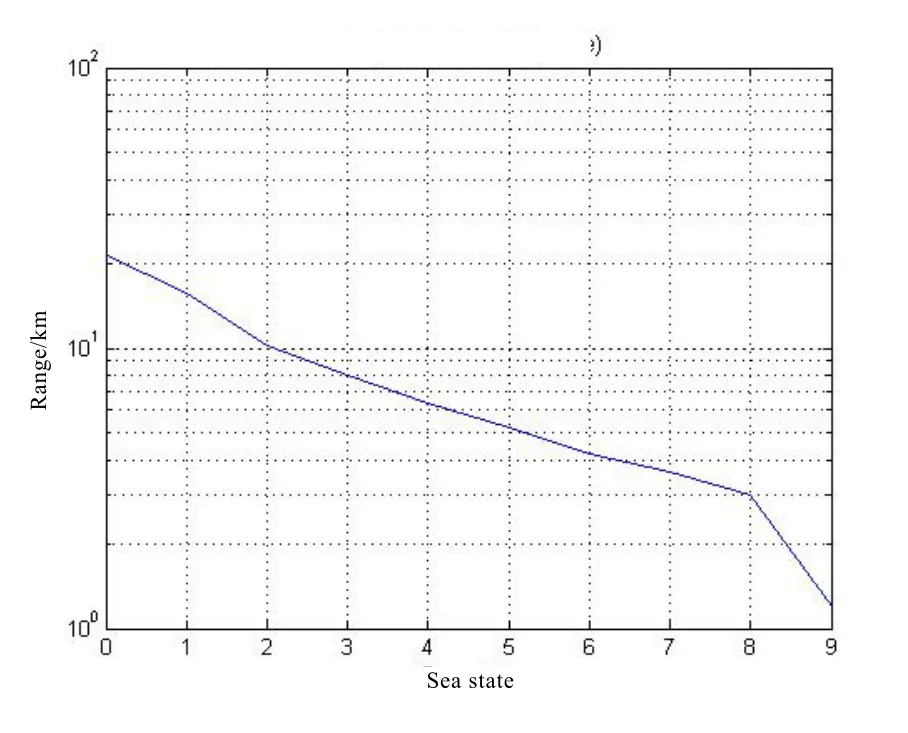
图3 主动声纳有效探测范围与海况的变化曲线
仿真2:海况对被动声探潜装备探测能力的影响。设一水下目标的辐射噪声声源级为170 dB,接收机检测阈值12 dB,接收指向性指数0 dB,水深250 m,混合层深度50 m,目标深度200 m,被动接收深度80 m,Tρ的取值为每反射一次衰减3 dB,声速梯度0.017/s,声速1 500 m/s,KL的取值为4 dB。当被动声信号频率为1 kHz,海况从0级到9级变化时,被动声纳有效探测范围变化曲线见图4。
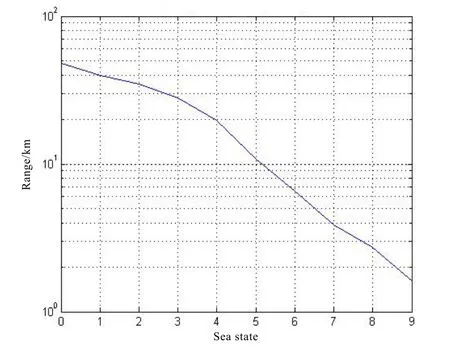
图4 被动声纳有效探测范围与海况的变化曲线
仿真3:工作深度对主动声探潜装备作用距离的影响。考虑收发合置换能器,即接收深度始终与发射深度相同,水声条件见图5。设主动声纳信号声源级为230 dB,接收机检测阈值为12 dB,接收指向性指数8 dB,目标强度20 dB,水深250 m,海况为2级,发射换能器指向性开角为±10°,发射频率为1 kHz。在此条件下,当声纳工作深度从20 m以10 m为间隔变化到200 m时,主动吊放声纳的搜索半径变化曲线如图6所示。
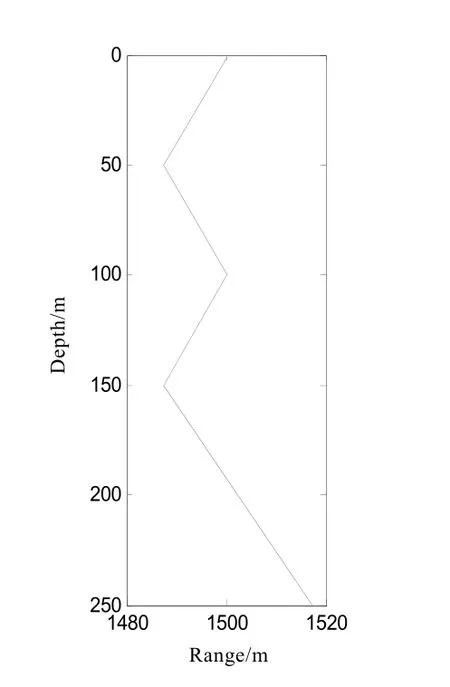
图5 水声条件
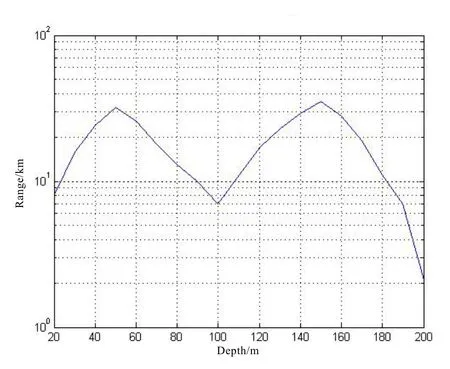
图6 主动声纳有效搜索半径与声源深度的变化曲线
由图6可以看出,在图5的水声条件下,主动吊放声纳最大的作用距离几乎以同样的数值出现在两个具有声速最小值的深度上,其中吊放声纳工作深度位于150 m 深处时的作用距离稍大,这是因为吊放声纳工作深度位于50 m 深度时,仍然会有一小部分初始掠射角比较大的声线会被海面反射,造成一些能量的损失;而当吊放声纳工作深度到了150 m 深度时,距离海底和海面都有一定距离,声线有足够的反转厚度,使得仅有少量声线经海面反射,而且在150 m 到海底之间这样大的正声速梯度下,所有初始掠射角为负的声线均能在到达海底以前反转回来,没有海底反射损失,使得作用距离可以很大。作用距离的最小值出现在吊放声纳工作深度位于200 m的情况下,这是因为此时不论是海底反射还是海面反射都非常强烈,能量损失很大。
仿真4:工作深度对被动声探潜装备作用距离的影响。水声条件见图5,设接收机检测阈值为12 dB,接收指向性指数0 dB,水深250 m,海况为2级,潜艇噪声声源级为150 dB,声信号频率为500 Hz,在此条件下,当目标深度150 m,吊放声纳以被动方式工作,工作深度从20 m 以10 m为间隔变化到200 m时,被动声纳的搜索半径变化曲线如图7所示。由图7可以看出,在图5的水声条件下,被动声纳的作用距离大体上随其工作深度的增加而增加,到200 m时达到最大值,其主要原因是此时目标位于假设的最大声纳工作深度200 m,而声汇聚区又恰好是在大约210 m 深度形成的。
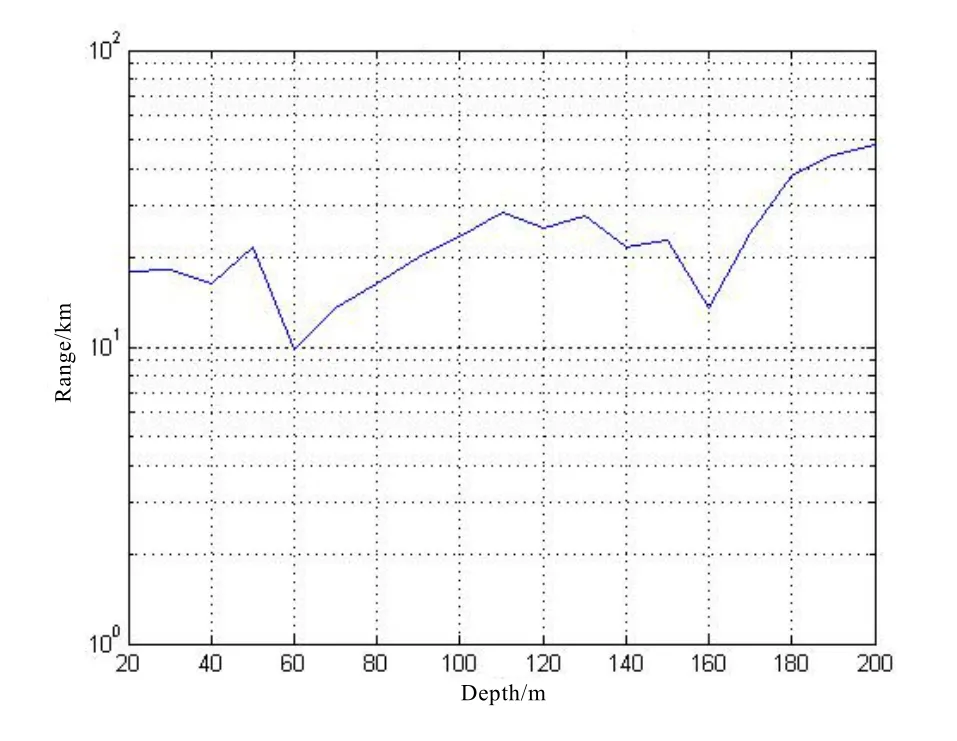
图7 被动声纳有效搜索半径与工作深度的变化曲线
5 结论
作战海域海洋环境变化是时域—空域—频域变化的,特别是作战海域声速梯度变化,直接影响航空声探潜装备的最佳工作深度,并进而影响其探测能力;作战海域海况影响海洋环境噪声,直接影响主被动声探潜装备的探测能力。因而,合理利用海洋环境条件,可以有效保障航空声探潜装备的探测能力。
[1]杨日杰,何友.航空搜潜装备搜潜范围建模与仿真研究[J].系统仿真学报,2003,15(11):1547-1549.
[2]刘孟庵,连立民.水声工程[M].杭州:浙江科学技术出版社,2002.10.
[3]张仁和.浅海中的平滑平均声场[J].海洋学报,1981,3(4):535-544.
[4]凌震莹.潜艇辐射噪声测量方法[J].声学与电子技术,2004(2):28-29.
[5]刘建军.浅海混响及混响反演海底反射损失和散射强度的研究[D].北京:中国科学院声学研究所,2000.
猜你喜欢
军事护理(2022年4期)2022-05-08
皮革制作与环保科技(2021年5期)2021-11-27
潍坊学院学报(2021年2期)2021-07-22
商品与质量(2020年28期)2020-11-26
考试与评价·八年级版(2020年5期)2020-10-29
电子制作(2018年23期)2018-12-26
舰船科学技术(2017年7期)2017-08-02
火控雷达技术(2016年2期)2016-02-06
船海工程(2015年4期)2016-01-05
舰船科学技术(2015年8期)2015-02-27
