液压驱动仿生推进器运动特性的数值仿真
2010-02-21 05:34:04徐海军潘存云张代兵谢海斌
兵工学报 2010年11期
徐海军,潘存云,张代兵,谢海斌
(国防科技大学 机电工程与自动化学院,湖南 长沙410073)
采用奇鳍/对鳍(MPF)模式游动的鱼类,在游动过程中可以在身体不发生变形的情况下,仅依靠柔性长鳍的波动运动获得推力[1]。该类生物在巡游时,波动鳍的运动状态是稳定的,即波幅、波形、波形周期等参数相对固定。当其在开始游动、停止游动、捕食猎物或规避危险时,波动鳍的运动状态发生急剧变化,从而产生相应快速变化的操控力和操控力矩,以适应各项机动运动的要求。波动鳍的急剧变化运动,表明波形的变化特性在实现载体的机动性中有着重要的作用。
受MPF 模式鱼类游动启发而研制的液压驱动的波动鳍仿生推进器,无论是驱动方式还是运动效果,均与仿生对象较为接近,其综合推进效果较已有的伺服电机驱动的波动鳍仿生推进器更为明显。液压系统固有的特性使得该仿生推进器在启动、稳定运行、停止过程中的运动和动力特性,与传统的采用电机驱动机械传动结构的仿生推进器有着明显的不同[2],前者可以被动地逐渐承受并适应负载。液压系统的这种缓冲特性不仅有利于保护仿生推进器结构本身,而且从流体力学的角度上讲,其能够更为有效地利用能量,提高推进效率[3]。
液压系统的参数决定仿生推进器的波形参数,而波形参数的变化又对仿生推进器自身推进性能有重要的影响。因此有必要对其在启动、停止等动态过程中的运动特性进行分析,研究液压参数对波形参数的影响,以期为仿生推进器的性能改进提供理论指导,进而促进波动仿生推进机理的研究。
1 波动鳍仿生推进器模型的建立
1.1 波动鳍仿生推进器结构描述
如图1所示,液压驱动的波动鳍仿生推进器,由旋转式流体分配阀(分配阀)、主油管、支油管、鳍条摆动装置、鳍条、柔性蹼等几部分组成[4]。
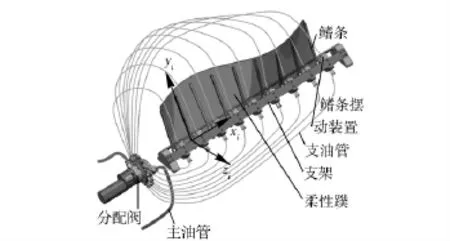
图1 液压驱动的波动鳍仿生推进器Fig.1 Bionic thruster of undulate fin driven by hydraulic system
将n(n 为仿生推进器中鳍条的根数)个鳍条摆动装置按照仿生对象的鳍条基线形状排列好并用一个长条状支架固定,然后将其分别连接到分配阀周向上的n 对支路油孔上[5],通过鳍条夹持具有一定弹性的薄乳胶皮作为柔性蹼。当向分配阀中连续注入高压液压油,并且电机驱动分配阀的阀芯转动时,n 根鳍条即呈现有相位差的有序摆动,带动柔性蹼呈现波形。
结合对仿生对象“尼罗河魔鬼”鱼游动过程的观察,对波动鳍结构作如下描述:鳍面附着在鱼体背部上的基线为一条曲线;鳍面上每根鳍条绕基线上相应连接点摆动的幅度不一定相同,在一定范围内受鱼体肌肉的控制,并与当前水流压力有关;在稳态巡游过程中,每根鳍条的摆动规律基本相同[6]。
1.2 波动鳍仿生推进器数学模型
参见图1,对于第i(i≤n)个鳍条摆动装置,以鳍条的转轴中心为原点O,竖直向上为yi轴,过原点Oi且水平向右为zi轴,根据右手定则建立摆动装置随体坐标系Oixiyizi.取第一个鳍条摆动装置坐标系Ox1y1z1为仿生推进器的整体坐标系Oxyz.对仿生对象进行数学上的抽象后,在坐标系Oxyz 中鳍面各参数的数学描述,如图2所示。
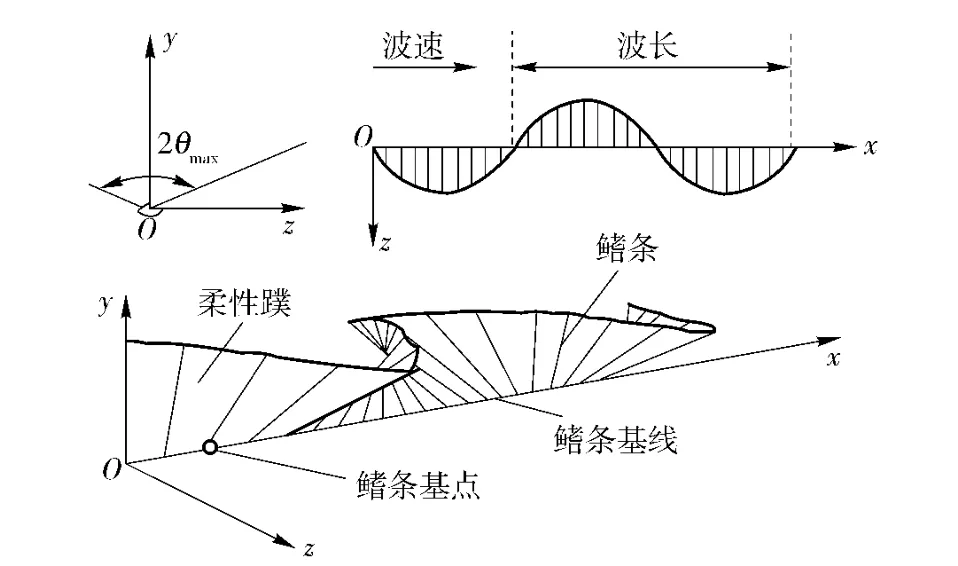
图2 鳍面参数描述及坐标系建立Fig.2 Reference frame and parameters'illustration for undulate fin
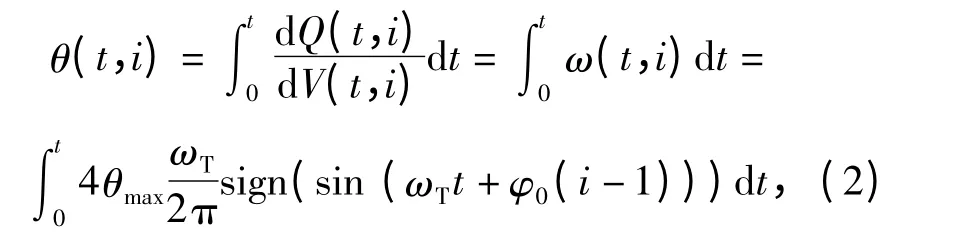
任意t 时刻鳍面的形状可由下述方程[7]描述

式中:D0为相邻两根鳍条之间的间距;λ∈[0,1],t∈[0,+∞),i∈[1,n];φ(i)为第i 根鳍条的初始相位;l(i)为第i 根鳍条的长度;θ(t,i)为t 时刻第i根鳍条相对于y 轴的夹角,且有
1.3 基于Mablab/SimScope 的仿真模型
在Matlab 软件的Simulink 模块中,SimScope 模块是一个面向对象的仿真环境,在该模块中可以根据物理模型的特点,搭建仿生推进器的仿真模型,并对其动态特性快速展开分析,以可视化的图形显示仿真的结果[8-9]。
依据(1)式和(2)式,结合图1所示的仿生推进器结构,在Matlab 软件的SimScope 模块中搭建仿真模型,如图3所示。分配阀的模型由多路信号发生器和液压电磁阀组合而成[10-11],鳍条摆动装置由一个双作用摆动液压缸表示,并附带有惯性质量和阻尼[12],液压源设定为具有理想的压力,其流量可以根据需要任意设定。为了简化模型系统结构及便于查看仿真的结果,在不影响分析内容性质的前提下,搭建的仿真模型中n=9,且只取前3 个鳍条摆动装置的摆动角度和角速度作为研究内容。
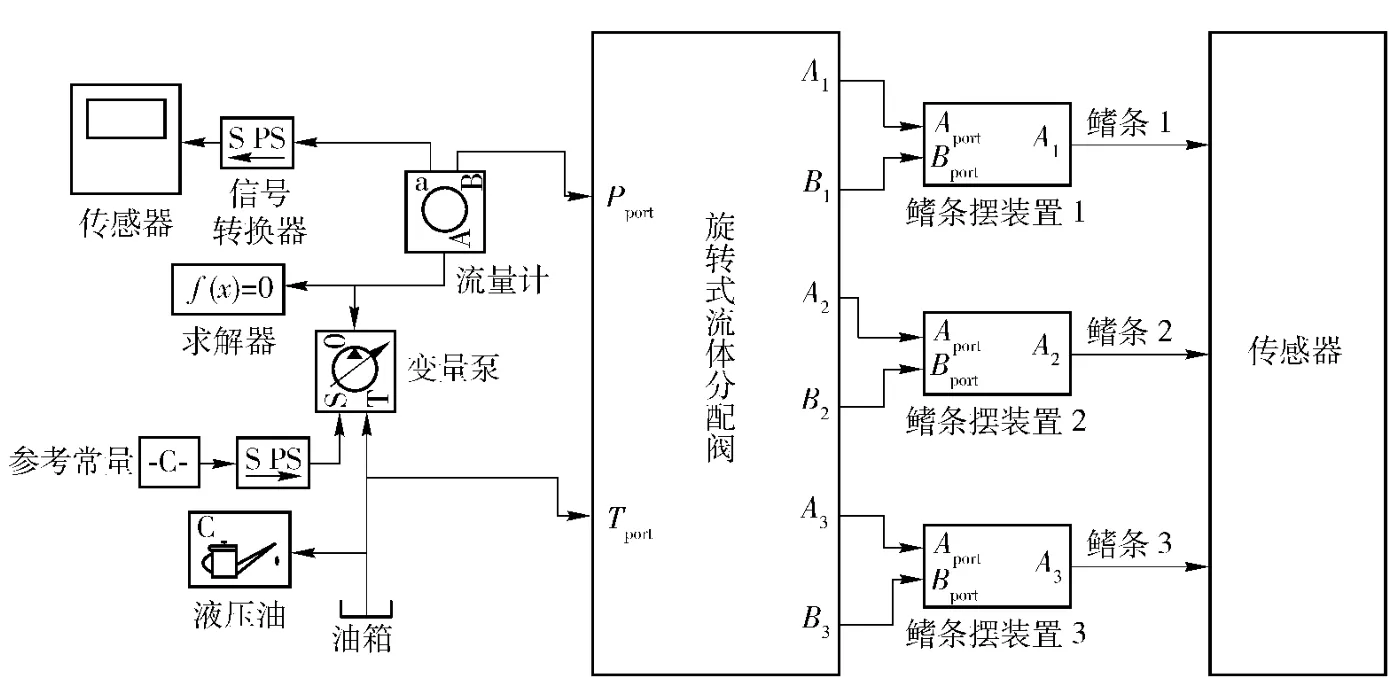
图3 液压驱动的仿生推进器MATLAB 仿真模型Fig.3 Simulation model of hydraulic-driven bionic thruster in MATLAB
2 动态过程的仿真与分析
液压驱动的仿生推进器在启动、停止过程,以及加、减速过程中的动态特性,与其波形参数的变化有着密切的联系,因此首先需要分析仿生推进器波形参数与液压参数之间的关系。
在仿生推进器中,液压系统的参数主要包括流体的压力p、流量Q,以及旋转式流体分配阀的角速度ωT等。在分析过程中压力p 足够大,不讨论压力p 对波形参数的影响。波动鳍的波形参数,主要有波形传播周期η(等同于单根鳍条摆动周期ηi)、波形传播方向γ(γ =1 时正向传播,γ=-1 时反向传播)、单根鳍条的当前最大摆角θmax等。由于波形传播具有对称性,为简化分析过程,取γ=1.
2.1 液压系统参数与波形参数的关系
根据(1)式和(2)式可知,ωT保持不变时,Q 增大,则单根鳍条摆角增大,整体上表现为波形幅度增大,Q 减小则鳍条摆角减小,波形传播频率η 和方向γ 不变。当Q 保持不变时,ωT增大,则鳍条当前最大摆角θmax减小,表现为波形幅度减小,传播周期η 减小;反之当ωT减小时,鳍条当前摆角θmax增大,波形传播周期η 增大,传播方向γ 不变。
在图3所示的仿真模型中,分别取流量Q 和旋转式流体分配阀的转动角速度ωT的不同组合,仿真结果如图4所示。
图4分别描述了不同液压参数下主要波形参数的变化过程,与前面理论分析的结论相同。这些曲线的变化规律还表明液压系统的两个参数对波形参数的影响是不同的:流量Q 只对单根鳍条的最大摆角有影响,而分配阀的角速度ωT则对波形两个参数都有影响。
要实现对仿生推进器波形2 个主要参数的独立控制,则在调整ωT时,必须对Q 做相应的补偿,通过对参数Q 和ωT的控制算法设计,使得在调整波的传播频率η 时,保证波形的幅度不发生改变,反之亦然,从而操控仿生推进器满足不同的推进需求。
2.2 启动过程特性分析
仿生推进器的启动过程为:首先使分配阀在电机驱动下以恒定的角速度ωT转动,然后开启液压源。在仿真模型中,设定分配阀转速为ωT=2π,用一个斜坡信号代替液压源,使液压源的流量Q 从0逐渐增加到额定值,记录每根鳍条从静止到最大摆角稳定这一过程中的摆动角度θ(t,i)和角速度曲线ω(t,i),如图5所示。
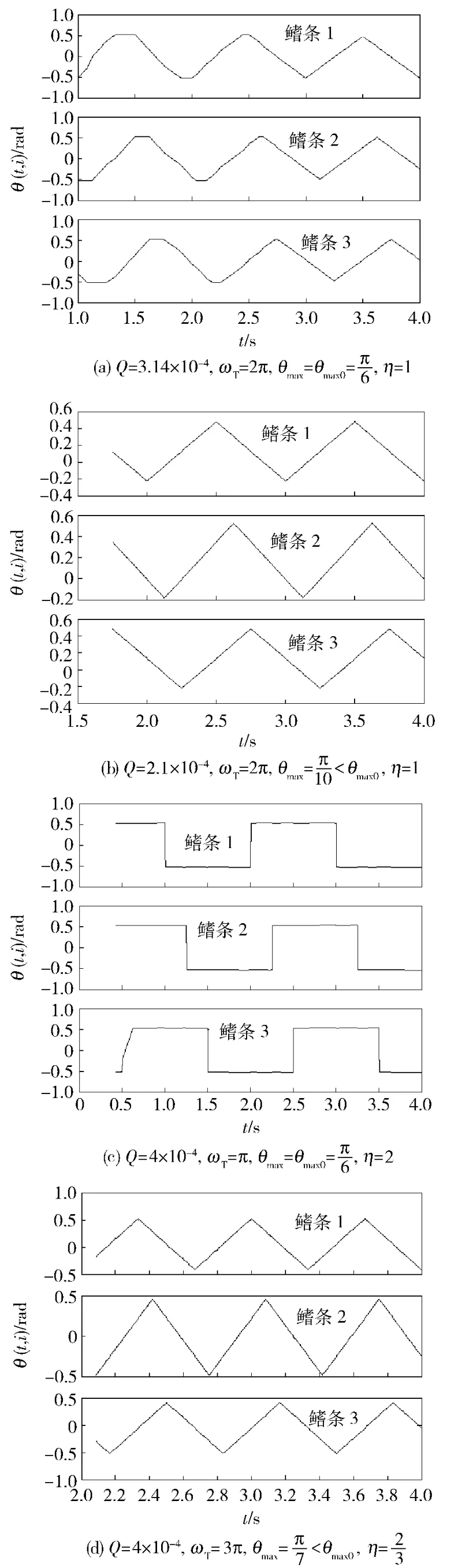
图4 不同液压参数下主要波形参数的变化过程Angle and velocity for different hydraulic parameters
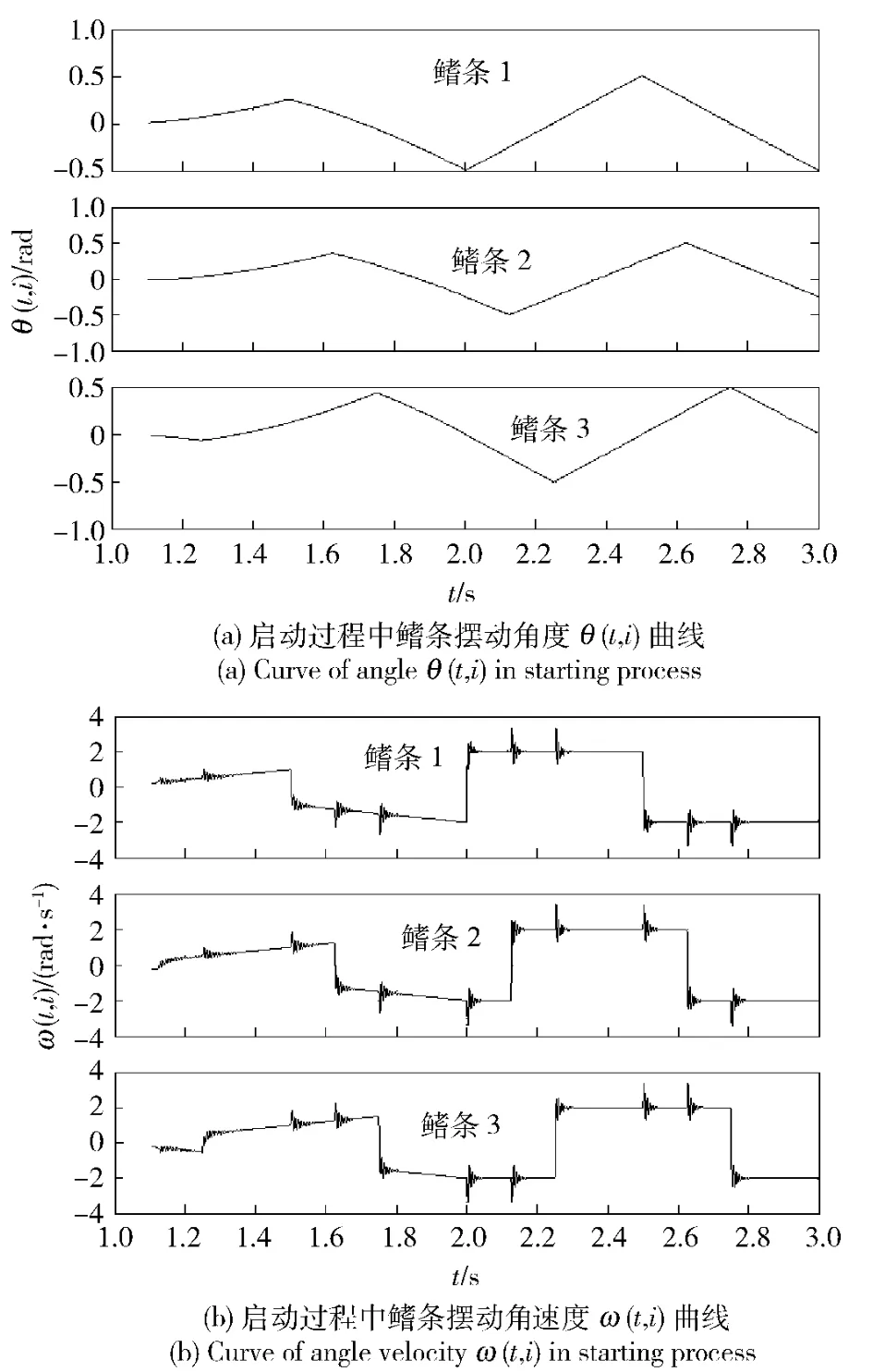
图5 启动过程中鳍条摆动角度和角速度曲线Fig.5 Angle and velocity of fins in starting process
从图5可知,ωT为恒定值时,随着流量Q 从0逐渐增大到额定流量,每根鳍条的最大摆角也从零逐渐增大到一个稳定值,与之对应的摆动角速度ω(t,i)也呈现对称的往复变化规律,其绝对值逐渐增大到一个稳定值。由于分配阀结构上使相邻的2个油管中的液体流动呈现一定的时延,相邻的鳍条摆动角度和角速度曲线均呈现相应的时延,从而在整体上呈现有序的摆动,带动柔性蹼形成波动鳍面。
2.3 停止过程特性分析
仿生推进器停止运动过程中,仍然保持分配阀以恒定的角速度ωT转动,然后逐渐减小液压源流量Q 直至为0,此过程中鳍条最大摆角逐渐减小直到停止摆动,然后停止分配阀的阀芯转动。记录这一过程中鳍条摆动角度θ(t,i)及摆动角速度ω(t,i)的变化曲线,如图6所示。
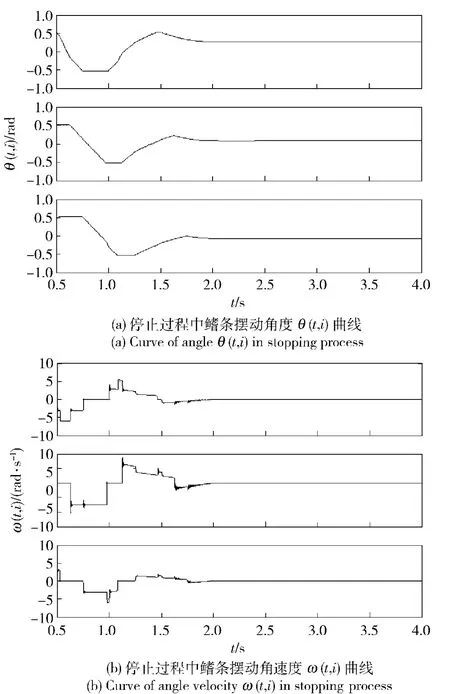
图6 停止过程中鳍条摆动角度及角速度曲线Fig.6 Angle and velocity of fins in stopping process
从图6可知,保持ωT为恒定值,当流量Q 从稳定值逐渐减小为0 时,每根鳍条的最大摆角及角速度逐渐减小至0.由于分配阀的作用,相邻鳍条之间仍然保持固定的相位差,但最后所有的鳍条将回归到平衡位置,波动鳍面退化呈一个平面形状。
图5和图6中的鳍条摆动角度及角速度曲线表明,由多根鳍条拟合的鳍面,启动过程的形状由一个平面逐渐演变为一个稳定的波形,在停止过程中则相反,其形状由一个稳定的波形逐渐退化为一个平面;启动、停止时间的长短与液压参数有着密切的关系。液压驱动的波动鳍仿生推进器这一特性,表明其在仿生运动的拟合上具有一定柔性,可以逐渐承载流体阻力负载,从而保护仿生推进器的结构。
在启动或停止过程中,若同时配合调整分配阀的阀芯角速度ωT,会对其动态特性会产生有利或不利的影响,具体的效果在2.1 节中已有分析。而加(减)速过程则可视为仿生推进器启动(停止)过程的特殊情况,只是初始(终止)速度不为0.
3 动态特性的试验验证
为验证仿真分析的结果,设计了一个n=9 通道的旋转式流体分配阀,并加工3 套鳍条摆动装置,组成一个液压驱动仿生推进器。对试验装置的启动与停止过程进行测试,观察3 根鳍条组成的波形变化,以及鳍条摆动角度和角速度的变化,分别记录相等时间间隔的试验结果,如图7所示。
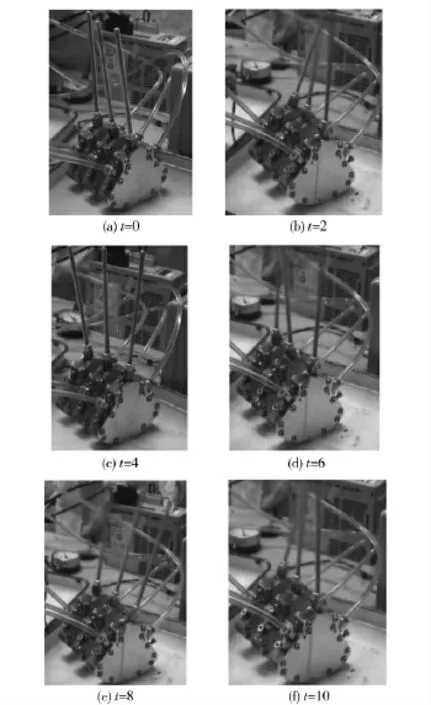
图7 液压驱动仿生推进器的试验Fig.7 Hydraulic-driven bionic thruster in test
从试验的结果看,当在分配阀上连接3 个鳍条摆动装置,并将其余6 个通道堵断,此时鳍条摆动流畅有序、波形明显且参数调整顺利,单根鳍条的摆动驱动力矩充沛且最大摆角可达±30°.在启动过程中,每根鳍条的最大摆角随着流量的增大逐渐增大,由3 根鳍条拟合的鳍面波动幅度逐渐增大到稳定值,如图7(a)~(c)所示;在停止过程中,鳍条的最大摆角逐渐减小并有序摆动,最终所有鳍条处于一个平面内,如图7(d)~(f)所示。试验的结果与前面理论分析和仿真分析的结论相同。
4 结论
采用液压驱动的波动鳍仿生推进器,其在稳态运行时,能够呈现完整、周期性、等幅的稳定波形;在启动、停止、加减速阶段,波形逐渐变化,从而可以使负载逐渐施加到仿生推进器上。这种特性不但有利于保护仿生推进器结构,而且能够更为有效地利用能量,效能更高。对这一特性的研究,不但可以深化MPF 推进模式的动态变化过程的认识,深入波动鳍推进机理的研究,而且在提高仿生推进器性能方面,有着许多重要的意义,为进一步全面地优化仿生推进器的推进性能提供了依据。
References)
[1]林龙信,沈林成,谢海斌.单柔性长鳍波动仿生推进器的设计与实现[J].兵工学报,2008,29(3):364 -368.LIN Long-xin,SHEN Lin-cheng,XIE Hai-bin.Design and implementation of undulatory bionics propeller based on single flexible fin[J].Acta Armamentarii,2008,29(3):364 -368.(in Chinese)
[2]徐海军,潘存云,谢海斌.仿鱼柔性长背鳍波动运动机构的设计与仿真[J].机械制造,2005,43(9):21 -23.XU Hai-jun,PAN Cun-yun,XIE Hai-bin.Design and simulation of the undulate machine imitating the motion of the long flexible fin[J].Machinery Manufactoring,2005,43(493):21 - 23.(in Chinese)
[3]王益群,张伟.流体传动及控制技术的评述[J].机械工程学报,2003,39(10):95 -99.WANG Yi-qun,ZHANG Wei.Summary of fluid power transmission and control technology[J].Chinese Journal of Mechanical Engineering,2003,39(10):95 -99.(in Chinese)
[4]张代兵,谢海斌,沈林成,等.液压驱动波动鳍仿生水下推进器:中国,200810031901.1[P].2008-07-28.ZHANG Dai-bing,XIE Hai-bin,SHEN Lin-cheng.A bionic underwater thruster of undulate fin driven by hydraulic system:China,200810031901.1[P].2008-07-28.(in Chinese)
[5]沈林成,张代兵,徐海军,等.旋转式流体分配阀:中国,200810031899.8[P].2008-07-28.SHEN Lin-cheng,ZHANG Dai-bing,XU Hai-jun.Rotatable direction valve:China,200810031899.8[P].2008-07-28.(in Chinese)
[6]王光明,胡天江,沈林成.仿鱼柔性长鳍波动运动分析与建模[J].动力学与控制学报,2006,4(4):349 -352.WANG Guang-ming,HU Tian-jiang,SHEN Lin-cheng.Analysis and modeling on fish long-based fin undulating[J].Journal of Dynamics and Control,2006,4(4):349 -352.(in Chinese)
[7]谢海斌,沈林成,张代兵.柔性长鳍波动推进动力学分析[J].力学与实践,2006,28(4):14 -19.XIE Hai-bin,SHEN Lin-cheng,ZHANG Dai-bing.Dynamic analysis of undulatory propulsion of long flexible fin[J].Mechanics in Engineering,2006,28(4):14 -19.(in Chinese)
[8]常桂秀.液压仿真技术的应用与发展[J].邢台职业技术学院学报,2007,24(1):60 -63.CHANG Gui-xiu.Application and Development of the Fluid power simulation technology[J].Journal of Xingtai Polytechnic College,2007,24(1):60 -63.(in Chinese)
[9]刘晶,史庆国.液压动力机构的SIMULINK 动态仿真实现[J].煤矿机械,2006,27(11):49 -51.LIU Jing,SHI Qing-guo.Dynamicrealization of SIMULINK in hydraulic dynamical outfit[J].Coal Mine Machinery,2006,27(11):49 -51.(in Chinese)
[10]刘忠,廖亦凡.高速开关阀先导控制的液压缸位置控制系统建模与仿真研究[J].中国机械工程,2006,17(7):745 -748.LIU Zhong,LIAO Yi-fan.Modeling and simulation of hydraulic cylinder position control system based on high-speed on-off valve pilot control[J].China Mechanical Engineering,2006,17(7):745 -748.(in Chinese)
[11]沈月忠,姜澄宇,王仲奇.一种比例阀压力控制系统数学模型的建立[J].现代制造工程,2006,(11):94 -96.SHEN Yue-zhong,JIANG Cheng-yu,WANG Zhong-qi.Establishment on mathematic model of a proportional valve pressure controlled system[J].Modern Manufacturing Engineering,2006,(11):94 -96.(in Chinese)
[12]程振东,田晋跃,刘刚.车辆全液压制动系统执行机构建模及仿真[J].系统仿真学报.2006,18(3):778 -793.CHENG Zhen-dong,TIAN Jin-yue,LIU Gang.Modeling and simulation of actuator of vehicle hydraulic brake system[J].Journal of System Simulation,2006,18(3):778 - 793.(in Chinese)
猜你喜欢
舰船科学技术(2021年12期)2021-03-29 01:28:38
中国造纸(2019年12期)2019-09-10 07:22:44
铁道机车车辆(2019年3期)2019-07-29 09:47:40
科技创新与应用(2019年8期)2019-06-27 01:48:48
当代陕西(2018年12期)2018-08-04 05:49:08
郑州铁路职业技术学院学报(2018年1期)2018-04-08 08:18:58
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
学习月刊(2015年10期)2015-07-09 03:35:12
中国铁道科学(2015年4期)2015-06-21 06:46:06