
船舶动力定位系统模糊PID控制算法研究
2008-04-24 05:06:44徐阳,俞孟蕻
中国舰船研究 2008年4期
1 引 言
随着对深海的开发,传统的多点锚泊系统己经不能满足深海区域定位作业的要求,并且有时作业点水下情况复杂不允许抛锚,锚泊系统就很难完成其保持船位的任务。船舶动力定位系统就是在这种情况下诞生的,它能够很好地解决这一问题[1]。
本文是以ROV工作母船为背景,围绕动力定位控制系统的开发所做的研究工作,主要包括以下几个方面:
1) 建立了适合于动力定位技术研究的船舶运动的动态数学模型以及对动力定位船舶造成干扰的海洋环境的数学模型;
2) 以大地坐标系与随船坐标系相结合的方式描述船舶运动,易于进行计算机的仿真研究;
3) 采用低频模型与高频模型分离的方式描述船舶运动,便于实现控制器和滤波器的设计;
4) 探讨用于船舶动力定位系统模糊PID控制的工作原理,进行船舶动力定位系统的计算机仿真。
2 船舶动力定位系统的数学模型
船舶动力定位的数学模型由两部分组成。第一部分是船舶的高频运动(0.3~1.6 rad/s),它是由一阶波浪引起的,这部分运动不反馈控制系统,控制器也不控制这部分的运动。因为这部分运动仅造成船舶的振荡,不会造成船舶的位移;第二部分是船舶的低频运动(一般小于0.5 rad/s),是由风、海流和二阶波浪引起的运动,动力定位系统仅控制这部分运动,这样可以减少推进器的磨损,减少控制所需的能量并降低设备的制造成本。
水面船舶动力定位只涉及到3种自由度的运动,即纵荡运动、横荡运动和艏摇运动(采用平行坐标系进行描述)。船舶的纵荡、横荡和艏摇的低频运动非线性方程如下:
Fy2(u,v)+Fv+FyA
T2(u,v)+Tzz+TA
式中,u,v,r为船舶的纵荡速度、横荡速度和艏摇角速度;Fx1,Fy1为与u,v有关的水动力;T1为与u,v有关的水动力矩;Fy2,T2为与u,r有关的水动力和力矩;Fu,Fv,Tzz为推进器产生的力和力矩;FxA,FyA,TA为风的力和力矩;M为船舶质量;mx,my为x,y轴方向上的附加质量;Izz为船舶绕z轴转动的转动惯量;Jzz为船舶绕z轴转动的附加转动惯量。
船舶在海上作业时会受到环境干扰作用,使船位和艏向发生变化。作用在船上最普通的干扰因素是风、波浪和海流。如果传感器系统能够测量某些环境因素,控制系统就可以在船舶受到扰动之前作用一个反力,有利于提高定位精度[2]。下面分别讨论各种因素。
1) 风力和风力矩可表达如下:
式中,Aw为上层建筑侧面积(受风面积);L1为船舶总长。
2) 波浪力及力矩可表达为:
式中,L为水线长;B为水线宽。
3) 海流的作用力可以表示为
式中,VC表示流速;AFW为水线以下船舶正投影面积;ASW为水线以下船舶侧投影面积;β为海流的入射角;CX(β),CY(β),CN(β)为试验系速。
3 船舶动力定位的控制方法
在船舶动力定位系统中,要求控制器直接读取来自位置测量系统的位置信号,并将其数值与预先设定好的基准值进行比对,经过控制器运算,得到消除位置偏差和抵消外界环境干扰力所需要的推进力[3]。然后由推进器产生推力,使得船舶尽可能地向目标值靠近。这是一个典型的自控控制系统。目前,应用最广泛的第二代动力定位控制系统采用PID控制+卡尔曼滤波的方法对动力定位船舶进行控制。
上述结构是早期动力定位系统采用的控制系统,能够实现三自由度的运动控制,但是该控制器存在不可避免的缺点。在设计控制器时,选择对性能至关重要的PID参数是非常困难的事情。而且PID控制器使用的是线性模型,对于动力定位这样复杂的非线性系统来说,其功效必然会受到限制。特别是当海况和船体发生变化的时候,PID系数不得不重新选择。针对这些缺点必须寻求新的控制方法。
4 模糊PID控制的理论基础
一般来说,PID控制器的结构和算法已经确定,控制品质的好坏主要取决于控制参数选择是否合理[4]。通常,不同的偏差|e|和偏差变化率Δe,对PID控制器参数KP、KI、KD的整定要求不同。
当|e|较大时,为了加快系统响应速度,KP取值较大;但为了避免开始时偏差|e|瞬时变大可能出现的微分过饱和而使控制作用超出许可的范围,应取较小的KD;同时为了防止系统响应出现较大的超调,产生积分饱和,应对积分作用加以限制,通常取KI=0。
当偏差|e|处于中等大小时,为使系统响应具有较小的超调,KP应取得小些,KI的取值要适当。在这种情况下KD的取值对系统影响较大,取值要大小适中,以保证系统的响应速度。当偏差|e|较小接近于设定值时,为使系统具有良好的稳态特性,应增加KP和KI的取值。同时为避免在系统的设定值附近出现振荡,应增强系统的抗干扰性能。当△e较小时,KD可取值大些;当△e较大时,应取小些。
根据以上原则,可以采用模糊推理的方法设计参数自调整的模糊PID控制器。其原理框图如图1所示。

图1 模糊PID控制器原理框图
5 动力定位系统仿真分析
Matlab软件是一套高效率的数值计算的可视化软件,它提供了丰富的数值分析、矩阵运算、图形绘制、数据处理等功能,本文在Matlab6.5基础上利用Fuzzy工具箱构造模糊控制系统进行仿真研究。本论文中假设研究对象除船尾主推进器外,还增加了由1台回旋式推进器组成的辅推系统,用以产生横向力矩和转首力矩。
动力定位系统主要关心船舶在水平面内三自由度的运动,包括纵向、横向和艏向运动。船舶在定位的过程中,一般均低速航行,三个方向之间的耦合较小[5]。因此,动力定位系统的控制系统一般具有3个独立的控制器,分别控制船舶在三个方向的运动。下面采用模糊PID控制算法对船舶动力定位系统进行控制,以下为具体实现过程和仿真结果。
模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则,在线对PID参数进行修改,便构成了模糊PID控制器。在运行中通过不断检测e和ec,根据模糊控制原理来对PID 3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动静态性能。
本文以典型海况下的ROV工作母船为研究对象,主要参数见表1。
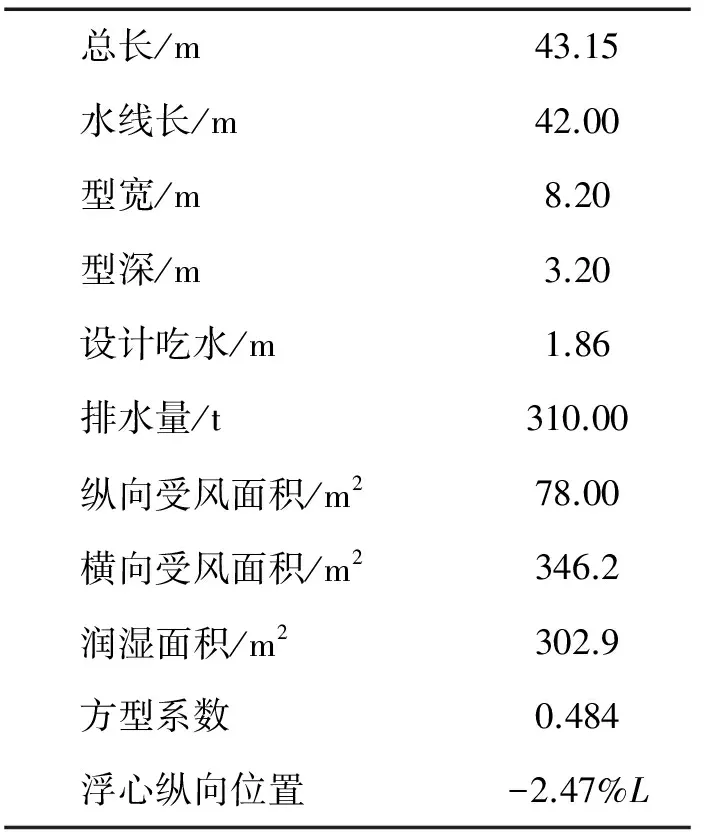
表1 ROV工作母船主要参数
进行了艏向、纵向、横向三个方向上的仿真,均得出理想的仿真结果。限于篇幅只给出了艏向的仿真曲线。无风、浪、流的静水情况下仿真时船舶的初始位置设在原点,初始艏向角为0°,最后定位在北向15 m,东向12 m,艏向角50°的航线上。
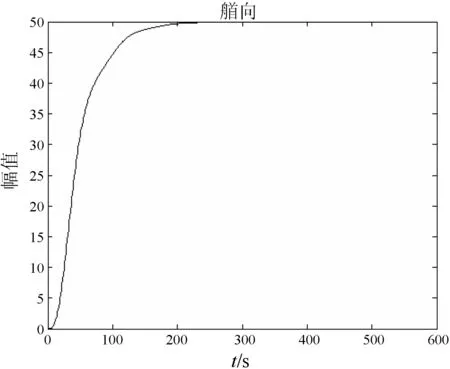
图2 无风、浪、流作用时艏向仿真曲线
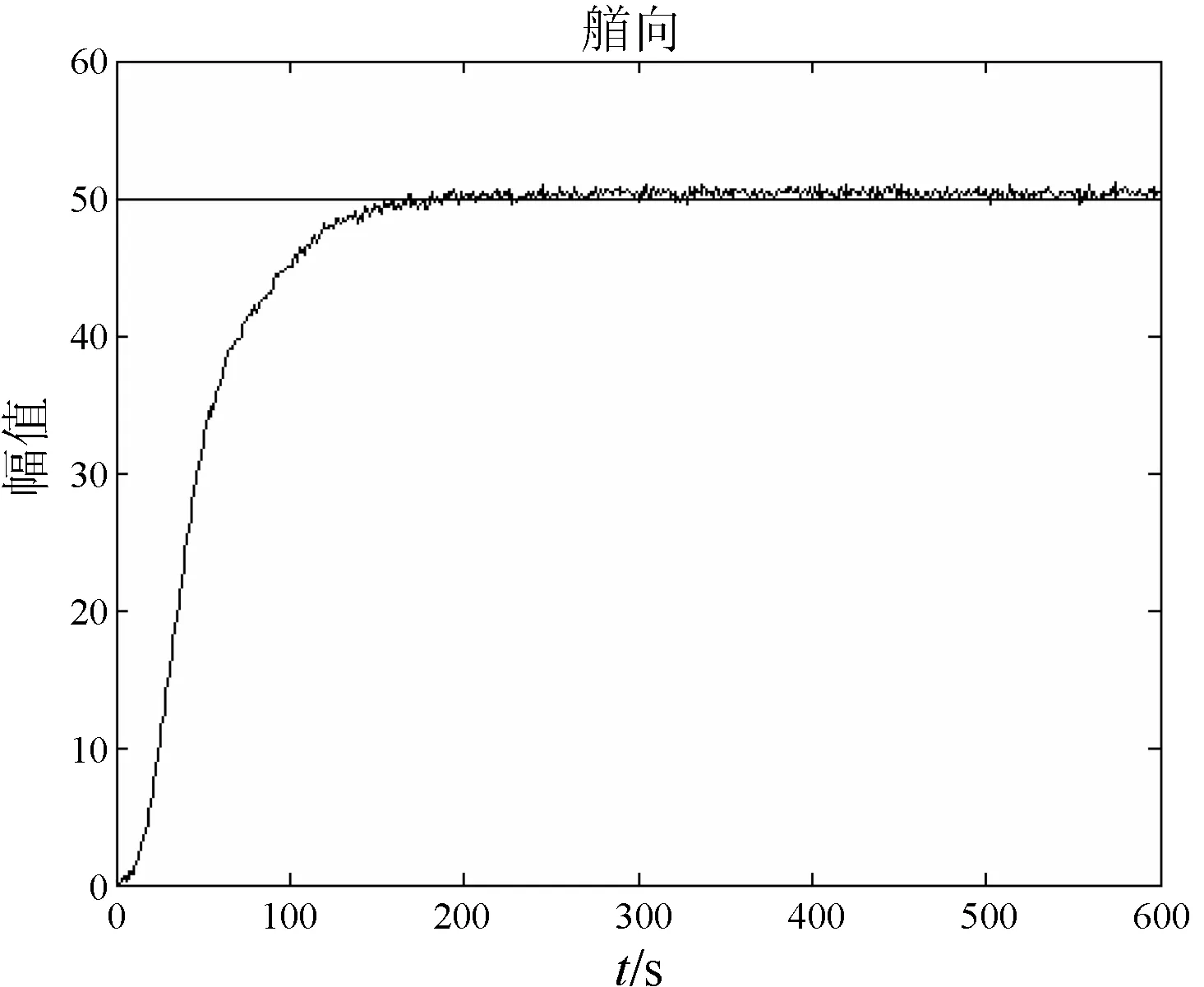
图3 有风、浪、流作用时艏向仿真曲线
可以看出,模糊PID控制器作用下的船舶在静水条件能够快速准确地达到定位要求,无超调,稳态误差在允许范围内。有风、浪、流作用情况下仿真时,船舶的初始位置设在原点,初始艏向角为0°,最后定位在北向15 m,东向12 m,艏向角50°的航线上。可以看出模糊PID控制器作用下的船舶在有干扰情况下能够使船舶达到预定位置,虽然有外界干扰,曲线存在扰动,但无超调,能够达到定位要求。
从仿真后的结果可以看出,模糊PID控制算法有较好的控制效果。模糊PID控制系统的响应时间在两种仿真环境下都很快;在风浪和洋流的作用下,模糊PID控制的系统稳定,误差小,有较强的抗干扰能力。
6 结论与展望
本文选用模糊逻辑系统为基础,利用船舶运动的状态空间模型,建立模糊PID控制模型。通过Matlab提供的模糊逻辑工具箱,对系统进行仿真,取得满意的效果。与常规控制器相比有三大突出优点:
1) 取消了解模糊的环节,减少控制器对人主观经验的依赖;
2) 能够进行定量的控制系统稳定性分析;
3) 具有更强的开放性和可扩充性,方便自适应项的引入。
由于这些优点,使得本控制器比一般模糊控制器具有更良好的性能。通过对模糊PID控制器的理论设计和仿真,可以看出模糊PID控制器良好的控制效果,但要将模糊PID控制器工程化应用还有很多工作要做。
[1] 钟建毅.船舶动力定位系统简介[J].航海技术,2000(3):39-41.
[2] 王宗义,肖坤,庞永杰,等.船舶动力定位的数学模型和滤波方法[J].哈尔滨工程大学学报,2002(4):24-28.
[3] 何崇德.“大洋一号”科学考察船动力定位系统的设计[J].船舶工程,2004(2):24-28.
[4] 王丽娟,李英辉,赵希人.模糊控制技术在船舶动力定位中的应用研究[J].船舶工程,1999(3):8-11.
[5] LORIA A,FOSSEN T I, PANTELEY E. A separation principle for dynamic positioning of ships: theoretical and experimental results[J]. IEEE Transactions on control systems technology, 2000(2): 332-343.
猜你喜欢
中学生数理化·七年级数学人教版(2021年10期)2021-11-22 07:53:08
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
故事作文·高年级(2017年10期)2017-10-19 15:30:59
中国船检(2017年3期)2017-05-18 11:33:09
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
小学阅读指南·低年级版(2016年1期)2016-09-10 07:22:44
航天制造技术(2016年6期)2016-05-09 08:32:51
