
源分离方法在船舶中的运用
2008-04-24 05:44许锐,朱显明,柯兵等
中国舰船研究 2008年6期
1 引 言
为了有效地控制噪声,在降噪措施实施以前,首先应进行噪声源分析,确定主要噪声源位置、查明噪声源贡献。在噪声源识别技术发展早期,通常使用逐一开启法进行噪声源识别,并被工程界一直沿用至今[1]。该方法简单、直观,是现今船舶机械设备噪声源分析常用方法,但该方法要求设备能够实现逐一开启。
上世纪70年代,国外基于信号处理技术的噪声源分析得到了蓬勃发展。1971年ROTH P R[2]首先在有背景噪声条件下用常相干函数正确识别了噪声源,1974年CHUNG J Y[3]等以六路输入单路输出系统模型采用多重相干函数研究了内燃机噪声。但对于相关噪声源识别的问题,相干分析就无法准确识别出噪声源。同年KOSS L L[4]把多重相干函数和偏相干函数同时应用于冲压机上瞬时噪声源的识别,这是用偏相干函数识别噪声源的成功例子之一。国内是自80年代中开始研究偏相干技术的[5],已成功地应用于飞机、汽车等民用产品领域,取得了良好的经济效益。但偏相干计算相对繁杂[6],国内运用偏相干方法开展船舶噪声源分析研究工作较少。
本文针对船舶结构噪声源方法研究的不足,运用相干和偏相干方法进行船舶噪声源分离,证明了相干和偏相干方法进行船舶噪声源分析的可行性,得到了一些有用的结论。
2 基本理论
2.1 相干理论
一个振动系统具有三要素:系统特性、输入和输出,这三者相互联系,知其二,可求其三[7]。噪声源分离问题抽象化就是在多输入单输出系统中判断哪个输入对输出的影响大。在图1模型中,有i个被定义且可测量的输入xi(t),i=1,2,…,i,它们通过各自脉冲响应函数hi(t)产生一个线性输出,其中y(t)包括背景噪声n(t)。

图1 多输入单输出模型
相干分析[8,9]是在输出的频谱下,分析出输出的特征频率与各振动源之间的关系,可以更进一步确定振动源对输出的特征频率的影响。相干分析依据的是相干函数,相干函数是表明两个函数之间的内在关系,辨别两个信号离散分量相关程度的一个频域函数,它的大小表明评估点的振动能量中来自于振动源信号的能量比例。

(1)
式中,Sxx(ω)和Syy(f)分别为x(t)和y(t)的自谱;Sxy(ω)为x(t)和y(t)的互谱。
相干系数越大,则表明两点之间的相关性就越强。计算各噪声源与评估点的相干函数,比较噪声源和评估点的相干函数在所关心频率处的大小,从而确定评估点处噪声源的来源。但相干分析法要求各个噪声源之间相互独立,由于这个限制,相干分析法使用常常受限。
2.2 偏相干理论
在多源激励系统中,当各源之间存在相干性时,它常常可以减弱甚至掩盖真源与输出之间的相干性[10]。偏相干分析理论能够将信号中与其它信号相干的部分去除,计算残余信号对输出造成的影响,对于多输入相干源识别问题,偏相干函数[11]是一种行之有效的识别手段。
对于图1所示的噪声传递系统,应用最小二乘估计法,在xi(t)和y(t)中去掉x1(t),x2(t),…,xi-1(t)的影响后,计算条件输入和条件输出及其偏相干函数,由于条件输入和条件输出已经去掉了各个通道的相干部分信号,所以偏相干函数能独立表示输入对输出的影响。xi(t)和y(t)之间的偏相干函数为:
(2)
式中,Siy·(i-1)!(f)表示在xi(t)和y(t)中去掉了x1(t),x2(t),…,xi-1(t)影响后xi(t)和y(t)的剩余互谱;Sii·(i-1)!(f)和Syy·(i-1)!(f)分别为在xi(t)和y(t)中去掉x1(t),x2(t),…,xi-1(t)影响后xi(t)和y(t)的剩余自谱。
从式(2)中可以看出,偏相干函数实质就是计算剩余功率谱也称条件功率谱,其计算是一个非常繁琐的过程。在计算机高速发展的今天,进行编程计算是一个十分快捷的过程,下面给出这个过程的迭代公式:
(3)
3 实验研究
3.1 实验描述
针对不同的研究对象,根据振动部件特点,确定影响系统输出的主要声源,把这些源作为系统的输入,把评估点的振动信号作为输出,这时就构成了q个输入单输出的声源识别模型,模型中的输入和输出是可测量的。提取实验数据并进行后处理,数据后处理过程中的条件功率谱和条件传递函数迭代计算如式(3)所示。
在船内选取2台距离相近的设备机脚(振动源也即输入)和船体结构(评估点也即输出)上布放传感器,2台设备是通过各自设备机脚隔振器—公共基座—浮筏和船体相连的,实验数据采集是在2台设备同时开启时进行的,记录时间为1 min,频率分辨率为1 Hz。船舶主要辐射中低频水噪声,因此实验频率范围选取在10~510 Hz。
本文进行船舶噪声源分离按以下4个过程进行:1) 信号有效性;2) 提取评估点特征频率;3) 判断信号源的独立性;4) 分离噪声源。
为了得到有效的测量数据,进行背景测量是不可或缺的。从测量的背景数据结果中得知,环境背景噪声比设备开启时的信号小15~20 dB,根据信号处理理论,此时测量数据有效。
3.2 特征频率提取
评估点振动总能量是各个频带的能量和,频带振动量级大对总量级的贡献就大,而频带量级会通过线谱的峰值频率(也就是特征频率)来体现。因而提取评估点的特征频率是进行噪声源频率分离的关键,图3是船体结构振动信号自谱,提取线谱图上量级大于80 dB的特征频率,如表1所示。
3.3 相干分析
相干分析法进行分离耦合源时受限,因此首先要进行声源之间的相干计算。为了得到相干系数,第一步应计算设备机脚自谱及其互谱,然后得到两者之间的相干系数,图4是设备1和设备2机脚相干函数图。
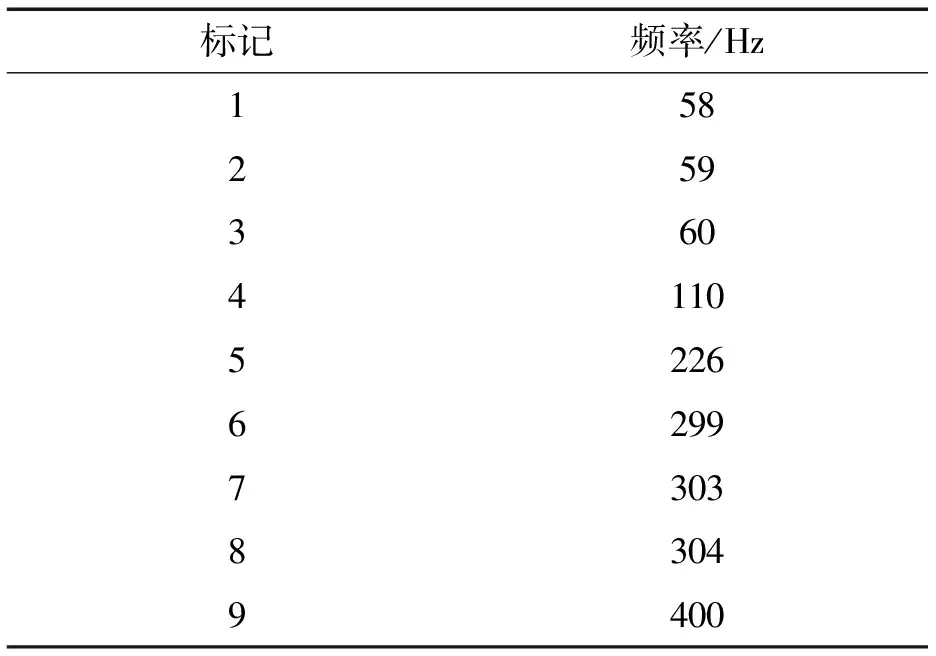
表1 船体结构的特征频率
在图4中提取设备1和设备2在特征频率处的相干系数,如表2所示。

表2 设备1和设备2在特征频率处的相干系数
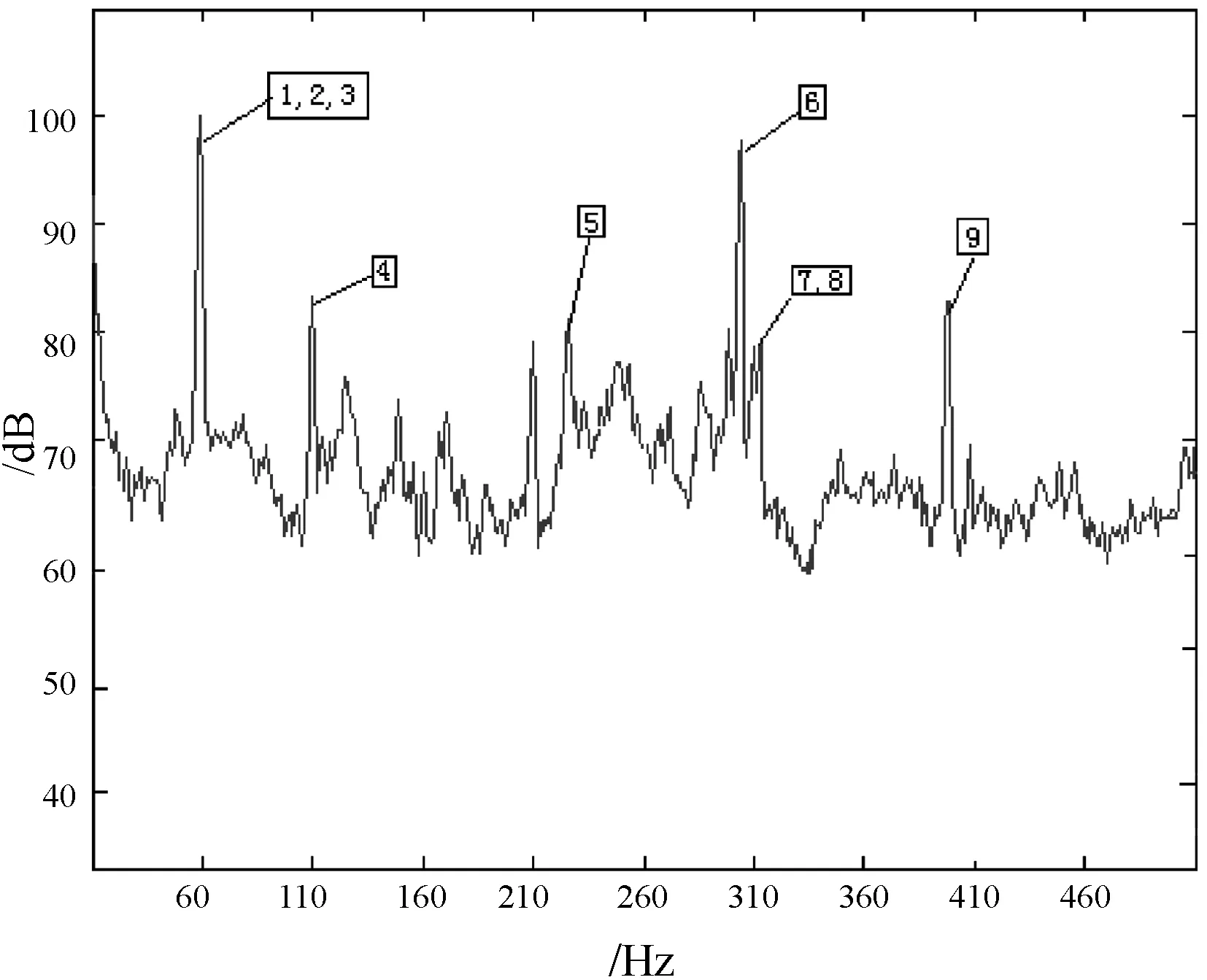
图3 船体结构自谱
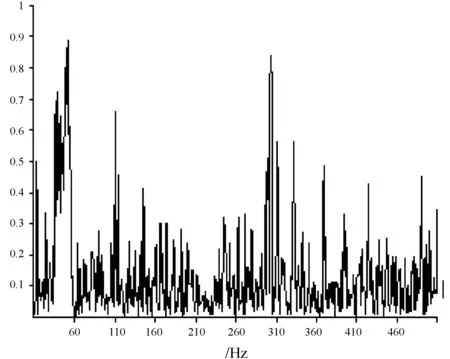
图4 设备1和设备2的相干系数
理论研究表明,相干系数小于0.1~0.2,即认为两源是不相关的。从表1中相干系数可以看出,两设备机脚在110 Hz、299 Hz、303 Hz、304 Hz频率处是相关的,需要进行偏相干分析,在其余特征频率处是无关的,只需进行相干分析即可。设备1和设备2与船体结构处的相干系数图如图5和图6所示。

图5 设备1和船体结构处的相干系数

图6 设备2和船体结构处的相干系数
提取两设备机脚无关的特征频率,找到两设备机脚与船体结构在这些频率处的相干系数,如表3所示。
比较表中系数可以看出,设备1在60 Hz、226 Hz与船体结构处的相干系数大,在这些频率上设备1对船体结构处的能量输出贡献大,在船体结构处的输出谱也就大;设备2在58 Hz、59 Hz、400 Hz与船体结构处的相干系数大,在这些频率上设备2对船体结构处的输出能量贡献大,也就是在船体结构处的输出谱大。经以上分析,实现了在无关频率处振源对评估点的能量贡献分离。

表3 在无关的特征频率处两设备机脚与船体结构处的相干系数
3.4 偏相干分析
两设备机脚在110 Hz、299 Hz、303 Hz、304 Hz是相关的,在这些频率上需进行偏相干计算,分别计算两者对船体结构处的能量贡献,设备1和设备2分别对船体结构处的偏相干函数系数如图7、图8所示。

图7 设备1和船体结构处的偏相干系数

图8 设备2和船体结构处的偏相干系数
提取上述相关频率的偏相干系数,如表4所示。
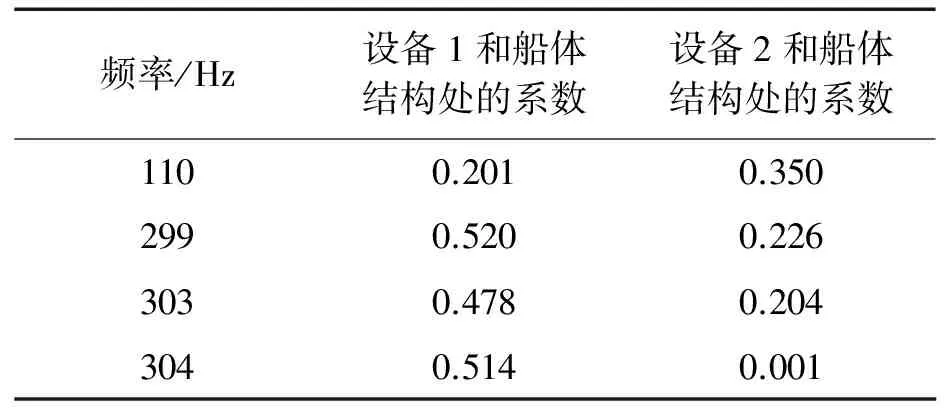
表4 两设备机脚分别与船体结构处的偏相干系数
从表4中可以看出,设备1在299 Hz、303 Hz、304 Hz与船体结构处的偏相干系数大,在这些频率上对船体结构处的贡献就大;设备2在110 Hz与船体结构处的偏相干系数大,这个频率上对船体结构处的贡献就大。
运用相干和偏相干计算方法,比较在特征频率处的系数大小,实现了船体结构的特征频率分离,找到了船体结构处的振动源来源,但是研究结果有待下一步证实。
3.5 实验验证
为了验证实验结果的正确性,本文另采用逐一开启法对实验结果进行了验证。图9和图10分别是设备1和设备2单独开启时评估点处的自谱,提取图中在特征频率处的自谱,如表5所示。

图9 设备1单独开启时评估点自谱

图10 设备2单独开启时评估点自谱
表5设备逐一开启时的评估点振动自谱

频率/Hz设备1开启设备2开启5882.081.75986.385.46088.686.611066.275.222659.552.429968.665.930391.361.730483.154.340052.673.4
从表5中验证结果数据对比得知,单独开启设备1时,评估点在58、59、60、226、299、303、304 Hz的频率上振动量级大;单独开启设备2时,评估点在110 Hz、400 Hz的频率上振动量级大。综合以上分析,在60、110、226、299、303、304、400 Hz频率上实验结果与验证结果吻合,在这些频率上成功对噪声源进行了分离。
在58 Hz和59 Hz处分析结果与验证结果不一致,但从采用逐一开启法验证数据发现,2台设备逐一开启时传递到船体结构处的振动量级相差不到1 dB,此时两者对船体结构处的贡献相差小,分离的意义不大。
4 结 论
安装在同一基座上的两源耦合性强,这意味着两源强相关,具有重叠的特征频率。本文通过建立船舶噪声源分离模型,选取了安装在同一基座和同一筏架上的振动量级相差不大的船舶机械设备源,采用相干分析法和偏相干分析法,比较成功地对特征频率进行了分离,实现了对噪声源进行排序。从分析结果和验证结果比较得知,噪声源量级相差较大时,相干和偏相干进行船舶噪声源分离结果是可靠的,达到了预期目标,实现了对同时开启设备的重叠特征频率的分离。本文研究为今后进一步进行全船噪声源分析提供了参考。
参考文献:
[1] 黄其柏,王雪川.分布噪声源诊断的偏相干理论与方法[J].声学技术,1995,14(3):97-101.
[2] ROTH P R. Effective measurements using digital signal analysis[J]. IEEE Spectrum, 1971(8):62-70.
[3] CHUNG J Y. Measurement of frequency responses and the multiple coherence function of the noised generation system of a diesel engine[J]. Journal of Acoustical Society of America, 1975, 58 (3):635-642.
[4] KOSS L L. Identification of transient sound sources on a punch press[J]. Journal of Sound and Vibration, 1974, 34(1):11-34.
[5] 韩秀苓.相干技术和噪声源识别的实验研究[J].电声技术, 1994(12):2-9.
[6] 章林柯,何琳,朱石坚.潜艇主要噪声源识别方法研究[J].噪声与振动控制,2006,26(4):7-10.
[7] 黄其柏.机械振动系统——分析·测试·建模·对策[M](第二版).武汉:华中科技大学出版社,2004.
[8] 孙玉. 基于声全息技术的噪声源识别方法研究[D].哈尔滨:哈尔滨工程大学,2007.
[9] 何祚镛.实船设备结构振动和水声声强测试分析及噪声源的判别[J].中国造船, 2003, 44(4) : 50-58.
[10] 杨德森.利用偏相干方法识别主要激励源[J].哈尔滨船舶工程学院学报,1994,15(3):35-44.
[11] 宋晶.利用偏相干函数法识别汽车整车噪声源的研究[D].成都:西华大学,2006.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
电子世界(2022年1期)2022-07-23
电子测试(2022年4期)2022-03-17
汽车工程(2021年12期)2021-03-08
振动工程学报(2020年1期)2020-05-21
科技创新与应用(2020年4期)2020-02-25
船舶标准化工程师(2019年4期)2019-07-24
光学仪器(2019年3期)2019-02-21
湖北农业科学(2017年12期)2017-07-15
雷达与对抗(2015年3期)2015-12-09
