一种求解控制系统信号流图传递函数的新方法
2025-03-07 00:00:00戴斐
科技风 2025年5期
关键词:传递函数
摘"要:采用梅森增益公式求取系统信号流图的传递函数时,为了确保不会遗漏任何回路或前向通路,利用支路起、终节点构成的方阵来简化梅森公式:将信号流图中所有参与回路形成的节点依次标上序号,然后引入特征方阵,它将系统的复杂结构转化为一个更简洁的形式,有效地避免了传统方法中容易出现的遗漏或重复计算的问题。这种矩阵表示法清晰地展现了节点间的连接关系,便于识别回路和前向通路。通过实例验证,新方法与传统的计算方法相比,在准确性和效率上都有了显著的提升,尤其在处理节点众多、结构复杂的信号流图时,优势更加明显,极大地减少了计算的复杂度和出错率。
关键词:连续控制系统;信号流图;传递函数;梅森增益公式
中图分类号:TP13""文献标识码:A
分析和设计控制系统的首要工作是建立控制系统的数学模型[1]。自动控制理论中,数学模型有多种形式[2]。其中,传递函数是最基本和最重要的数学模型[3]。
连续控制系统的传递函数定义为零初始条件下,系统的输出响应和输入信号的拉氏变换之比[4]。求取传递函数已有了科学规范的方法:梅森增益公式。但当信号流图较为复杂时,利用梅森公式往往会遗漏个别回路或前向通路。鉴于此,本文利用支路起、终节点的方阵形式来辅助梅森公式。
1"梅森增益公式简介
1.1"信号流图中的常用术语
《自动控制原理》教材中,给出了信号流图中常使用的一些术语:
(1)输入节点(源节点):仅有输出支路的节点;(2)输出节点(阱节点):仅有输入支路的节点;(3)前向通路:起始于输入节点,沿支路箭头方向,终止于输出节点的途径[2];(4)回路(闭通路):起始及终止于同一节点,并与其他节点相遇不多于一次的通路。
1.2"求解传递函数的梅森公式
梅森公式如下:
P=1Δ∑nk=1pkΔk(1)
式中:
Δ=1-∑Lm1+∑Lm2-∑Lm3+…(2)
Lm1为各个回路的增益之和,……,Lmn为每n个互不接触回路的增益乘积之和;P为从源节点到阱节点的传递函数;n为从源节点到阱节点的前向通路的数目;pk为从源节点到阱节点的第k条前向通路的增益;Δk为去除第k条前向通路后的Δ值[1]。
2"应用实例
在本节中将用一个实例来讲述如何利用支路起、终节点的方阵形式辅助梅森公式。
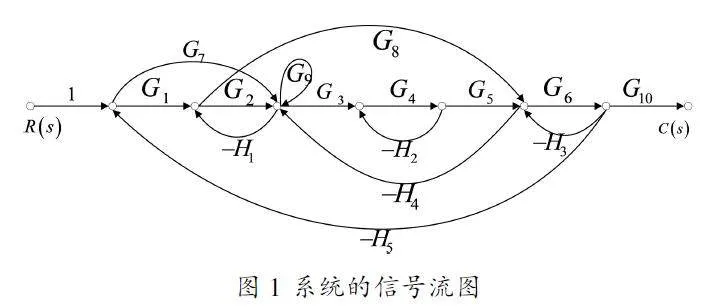
利用梅森公式,求解图1中闭环传递函数的步骤如下:
2.1"将节点依次标上序号
先需要确认是否存在两类不参与形成回路的特殊节点:
第一类特殊节点:若某源节点仅有一条输出支路(设该输出支路的终点为节点Ⅰ,且该源节点到节点Ⅰ的增益为α)时,则该源节点不参与形成回路,且其到阱节点的前向通路增益等价于节点Ⅰ到阱节点的前向通路增益乘以α。
第二类特殊节点:若某阱节点仅有一条输入支路(设该输出支路的起点为节点Ⅱ,且该阱节点到节点Ⅱ的增益为β)时,则该阱节点不参与形成回路,且源节点到该阱节点的前向通路增益等价于源节点到节点Ⅱ的前向通路增益乘以β。
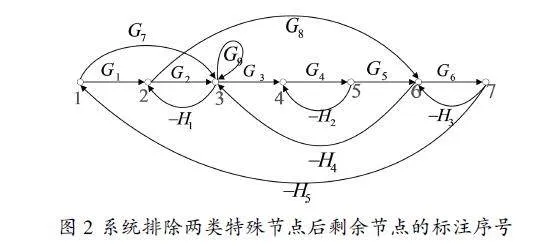
由梅森公式求传递函数仅涉及回路和前向通路,且前向通路增益位于传递函数的分子上。以上两类特殊节点均不参与回路的形成,若舍去后,则形成新系统,求出新系统的传递函数φ,则原系统的传递函数φ即为αφ(仅存在第一类特殊节点)或βφ(仅存在第二类特殊节点)或αβφ(第一类、第二类特殊节点均存在)。因此,以上两类特殊节点均不需要标注序号,以此来简化后续运算,只需要在排除这两类特殊节点后,将其余所有节点依次标上序号1、2、3、……即可,如图2所示。
2.2"构建系统信号流图的特征方阵A
该系统中的节点数为7个,因此构建一个7阶方阵A,若存在一条起点为i、终点为j的支路(其中,i、j为节点的序号),则Aij=1;否则Aij=0。即方阵元素的行、列号分别为可能存在的支路的起、终点。
注意:当i=j时,形成的是一条起、终点均为同一点,且除该点外不经过其他任意节点的自回路。如该系统中增益为G9的回路,只经过节点3,其为自回路,A33=1,即方阵A中不为0的主对角线元素对应的即为信号流图中的自回路。自回路不参与本文2.3节中回路的寻找过程,只在23节的最后重新计入回路数即可。所以,该系统的特征方阵A为:
2.3"寻找构成回路的连续支路
回路的起、终点为同一点,依次假设在2.1节中标注序号的各节点为回路的起、终点。而回路是由多条连续支路共同构成,当节点i同时为回路的起、终点时,认为构成这条回路的第1条支路的起点为i,第1条支路的终点为方阵A的第i行中不为0元素的列数。而第1条支路的终点为构成这条回路的第2条支路的起点,以此为依据,继续寻找构成回路的连续支路,直至某条支路的终点为i,结束寻找。
在寻找过程中还需遵循以下5个原则:(1)除了起、终点为同一节点,回路经过2次之外,回路经过其他节点的次数均不多于一次;(2)依次假设节点1、2、3……为回路的起、终点,为避免回路的重复计数,若在以节点i为起、终点的回路的寻找过程中,出现了序号数小于i的节点,则认为不可能构成回路;(3)不存在以序号最大的节点为起、终点的回路;(4)若第k列元素均为0,则无支路以节点k为终点,即该节点仅有输出支路,无输入支路,为源节点,所以不存在以该源节点k为起、终点的回路;(5)同理,若第s行元素均为0,则不存在以节点s为起、终点的回路。
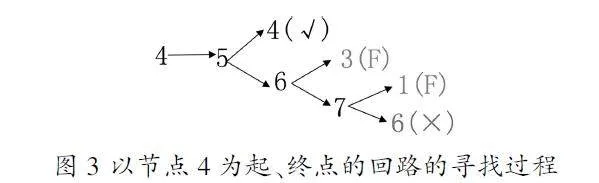
以寻找起、终点为节点4的回路的过程为例,如图3所示:方阵A中第4行只有第5列的元素不为0,而第5行中第4列、第6列元素不为0,分4、6两种情况寻找。
(1)4是起、终点的节点序号,从节点4出发,经过节点5后又回到节点4,即找到以节点4为起、终点的第一个回路。
(2)第6行中第3列、第7列元素不为0:3小于4,所以划去第3列,留下第7列。而第7行中第1列、第6列元素不为0,再分以下两种情况分别寻找:(Ⅰ)因1小于4,划去第1列;(Ⅱ)节点6在当前的这条连续支路链中已出现过1次,也需划去第6列。
至此,找到1条以节点4为起、终点的回路4→5→4。
图3中,回路的寻找过程中共出现两类无法构成回路的错误节点:第一类错误(×):回路经过除起终点外的其他节点的次数多于一次;第二类错误(F):回路经过序号数小于起终点序号的节点。
根据以上分析,回路的寻找过程应依次以节点1、2、3、4、5、6为起、终点,寻找到9个回路:①1→2→3→4→5→6→7→1、②1→2→6→7→1、③1→3→2→6→7→1、④1→3→4→5→6→7→1、⑤2→3→2、⑥2→6→3→2、⑦3→4→5→6→3、⑧4→5→4、⑨6→7→6。此外,还有自回路:⑩3→3。
对照信号流图中形成回路的支路上的增益,可得:
2.4"寻找互不接触回路
互不接触回路是指不存在相同节点的回路,该系统中的每2个互不接触回路分别为:
每3个互不接触回路中任取2个也必定是互不接触回路,寻找思路如下:
首先,统计在以上所有的每2个互不接触回路,即式(5)中出现过的回路,有回路②、③、⑤、⑥、⑧、⑨、⑩。
其次,式(5)中③、⑥都仅出现一次,所以排除③、⑥后剩下的每2个互不接触回路为②⑧、②⑩、⑤⑧、⑤⑨、⑧⑨、⑧⑩、⑨⑩这7个。
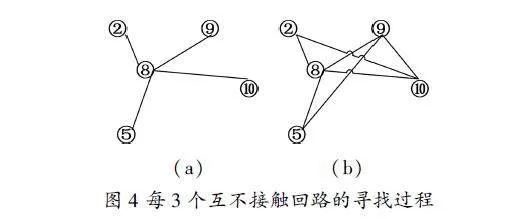
再次,在以上剩下的7个每2个互不接触回路中,⑧的频率出现最高,分别出现在⑧②、⑧⑤、⑧⑨、⑧⑩中,则在⑧与②、⑤、⑨、⑩之间分别连线,画出下图4(a)。
最后,还有互不接触回路②⑩、⑤⑨、⑨⑩,则分别在②与⑩、⑤与⑨、⑨与⑩之间连线,以任意3个回路在图中的位置作为顶点,若能构成三角形,则这3个回路就是每3个互不接触回路,如图4(b),共构成3个三角形,各自的顶点分别为②⑧⑩、⑤⑧⑨和⑧⑨⑩,即为该系统的每3个互不接触回路。
2.5"前向通路
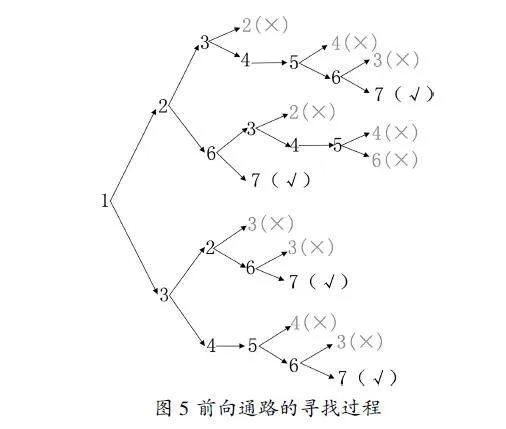
根据前向通路的定义,即输入R→输出C,同时依据简化节点个数的原则,舍去R、C,将节点1、7当作新的输入、输出,即为新前向通路的起点、终点。
在寻找新前向通路的过程中需要遵循回路经过任意节点的次数不多于一次的原则,如图5,(×)表示寻找过程出现错误节点,即回路经过某个节点的次数多于一次。
综上,寻找到4个新前向通路,分别是1→2→3→4→5→6→7、1→2→6→7、1→3→2→6→7、1→3→4→5→6→7。
2.6"余子式
前向通路包含所有节点,去除所有节点后Δ1=1;前向通路包含节点1、2、6、7,去除节点1、2、6、7后,信号流图中的回路还剩回路⑧4→5→4和⑩3→3,Δ2=1回路⑧的增益回路⑩的增益;同理,Δ3=1回路⑧的增益;Δ4=1。
2.7"利用梅森公式求得传递函数
根据梅森公式的定义,将以上回路和前向通路转化为增益形式,可得新系统的闭环传递函数为:
结语
通过以上实例,可以看出该方法的核心在于将复杂的信号流图转化为结构清晰的矩阵形式,从而避免了传统方法中容易出现的回路遗漏或重复计数等问题,显著提高了计算效率和准确性。这种方法为复杂系统的分析和设计提供了更便捷有效的手段,降低了学习和应用的门槛。因此,该方法具有重要的工程实践价值。
参考文献:
[1]胡寿松.自动控制原理[M].6版.北京:科学出版社,2013.
[2]李应雄.超磁致伸缩爬行电机的设计与仿真[D].天津:河北工业大学,2004.
[3]原宝太.磁流变阻尼减振器及其控制方法研究[D].广州:广东工业大学,2012.
[4]左韬.移动平台ATP系统的捕获跟踪与控制[D].武汉:武汉大学,2011.
基金项目:合肥职业技术学院校级产学研项目“RobotStudio虚拟仿真平台在工业喷涂中的应用”(项目编号:2022Acxy03);合肥职业技术学院校级质量工程“‘OBE+BOPPPS’模式下的高职实践类课程活页式‘适配教材’的建设研究——以《工业机器人操作与编程》为例”(项目编号:2023JYXM15);安徽省职业与成人教育学会教育教学研究规划课题“基于‘岗课赛证’评价体系下《工业机器人操作与编程》课程OMO混合式教学模式的探索和实践”(课题编号:AZCJ2023061);合肥职业技术学院校级教学研究项目“工业机器人编程与操作课程团队”(项目编号:2024hzkctd05);安徽省教育厅高校自然科学研究重点项目“基于图像处理算法的画图机器人路径规划优化方法的研究”(项目编号:2023AH052543)
作者简介:戴斐(1992—"),女,回族,安徽滁州人,硕士,讲师,研究方向:智能控制。
猜你喜欢
农业工程学报(2022年13期)2022-10-09 10:38:22
科教导刊·电子版(2022年5期)2022-03-19 08:11:34
水泥工程(2020年4期)2020-12-18 07:12:12
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
光学精密工程(2016年2期)2016-11-07 09:02:28
电子世界(2016年18期)2016-10-24 05:03:39
数据采集与处理(2014年2期)2014-07-25 09:21:54
电测与仪表(2014年11期)2014-04-04 09:21:20
中国测试(2013年2期)2013-05-03 09:11:00