
基于激光雷达的大型电力变压器吊装定位方法
2025-02-24 00:00:00张可可余俊
河南科技 2025年1期





摘 要:【目的】针对大型电力变压器因体积庞大而导致吊装过程中难以精确定位中心这一问题,提出一种基于激光雷达点云数据的定位方法。【方法】首先,利用多个激光雷达设备获取吊装作业环境的点云数据,经过RANSAC算法拟合去除地面反射信号、ICP配准及重构等处理后,得到完整的吊装环境点云数据。其次,对点云进行滤波和分割处理,以区分不同待定位的物体。为降低数据处理的复杂度,通过投影将三维点云转换为二维数据。最后,使用凸包算法与线性插值方法拟合出待定位物体的均匀轮廓,并通过拟合的轮廓计算出物体的中心坐标。【结果】经仿真测试,该方法在距坐标原点坐标差5 m范围内的定位误差小于2 cm,能满足精确吊装定位的要求。【结论】激光雷达能适应多种复杂环境,还具备较低的成本。将激光雷达应用于吊装定位任务中,能显著提升定位精度,且表现出良好的稳定性和可靠性,是精确定位大型设备的理想解决方案。
关键词:激光雷达;点云;吊装;定位
中图分类号:TP273+.5" " "文献标志码:A" " 文章编号:1003-5168(2025)01-0004-07
DOI:10.19968/j.cnki.hnkj.1003-5168.2025.01.001
A LiDAR-Based Method for Hoisting and Positioning Large Power Transformers
ZHANG Keke YU Jun
(East China Transmission and Transformation Engineering Co., Ltd., Shanghai 201803, China)
Abstract:[Purposes] To address the issue of accurately locating the center of large power transformers during the hoisting process due to their substantial size, this paper proposes a positioning method based on LiDAR point cloud data.[Methods] First, multiple LiDAR devices are used to capture point cloud data of the hoisting environment. After processing with RANSAC algorithm fitting to remove ground reflection signals, ICP registration, and reconstruction, a complete point cloud of the hoisting environment is obtained. Next, the point cloud is filtered and segmented to distinguish between different objects to be located. To reduce the complexity of data processing, the three-dimensional point cloud is projected into two-dimensional data. Finally, the convex hull algorithm and linear interpolation method are used to fit a uniform contour of the object to be located, and the center coordinates are calculated based on the fitted contour. [Findings] Simulation tests demonstrate that this method achieves a positioning error of less than 2 cm within a 5-meter coordinate difference from the origin, satisfying the requirements for precise hoisting and positioning. [Conclusions] LiDAR can adapt to a variety of complex environments and has a lower cost. The application of LiDAR in lifting and positioning tasks can significantly improve the positioning accuracy, and show good stability and reliability, which is an ideal solution for accurate positioning of large equipment.
Keywords: LiDAR; point cloud; hoisting; positioning
收稿日期:2024-09-08
作者简介:张可可(1987—),男,硕士,工程师,研究方向:工程装备数字化、智能化研制。
0 引言
随着城市发展、公共设施扩展及居民生活对电力需求日益增长,电力变压器容量也相应增加,对散热性能要求也愈加严格。传统的箱式变压器因安装位置分布不均且无序,会占用市区大量的地面空间。因此,在市政建设中将大型电力变压器安装在地下空间已成为主要趋势。
在以往大型电力变压器吊装至地下空间的施工过程中,所有的定位操作均由人工完成。由于大型电力变压器占地面积大且体积庞大,人工定位难以精准确定变压器与地下空间的中心位置。起吊时,如果吊钩未能位于电力变压器重心正上方,吊装过程中变压器可能会发生摆动。而在放置变压器时,若吊钩未能处于地下空间的中心位置,则有可能导致设备边缘与地下空间发生磕碰。因此,迫切需要一种能实现自动定位的方法,以改善这一施工现状。
激光雷达(Light Detection and Ranging,LiDAR)通过发射激光脉冲并测量其返回时间,从而确定物体的距离[1]。具体来说,激光雷达系统先发射短暂的激光脉冲,这些脉冲遇到目标物体后反射回接收器;接收器记录激光脉冲从发射到返回的时间,即飞行时间(Time of Fligh,ToF),通过已知的光速,可精确计算出目标物体距离。这一距离信息被准确反映在点云数据的坐标中,为后续的三维重建与空间分析提供数据基础。近年来,随着新能源汽车和自动驾驶技术迅猛发展,激光雷达技术取得显著进步,且其成本大幅下降。基于此,将激光雷达技术应用于吊装工程的定位系统中,已成为一种在技术和经济上均具可行性的解决方案。Livox和中金公司研究部预测的激光雷达价格趋势如图1所示,预计激光雷达的价格将持续下降。
1 激光雷达应用于吊装定位的基本流程
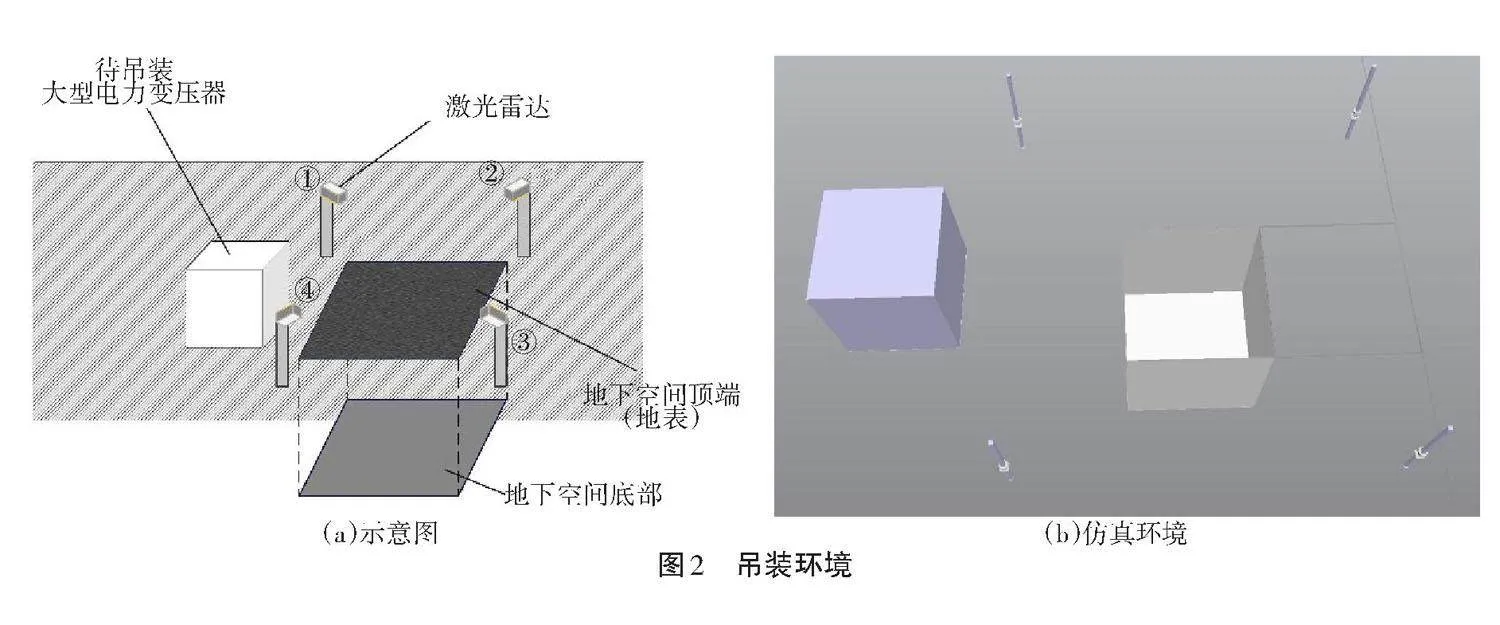
在将激光雷达应用于吊装定位时,先要获取吊装作业环境的完整点云数据。由于单个激光雷达的成像范围通常较为有限,因此,要在吊装环境中同时部署多个激光雷达装置。本研究在吊装环境中布置的激光雷达如图2(a)所示,其中①②③④均为激光雷达。将①号激光雷达的坐标系设定为
世界坐标系。图2(b)则是三维仿真环境,地下空间尺寸为4 m×4 m×4 m,大型电力变压器尺寸为3 m×3 m×3 m。仿真所使用的激光雷达型号为Velodyne HDL-64E S2,安装高度均为1 m,各激光雷达之间的间隔为10 m,相邻激光雷达的连线平行于世界坐标系的坐标轴,从而形成一个正方形。
首先,通过点云配准技术计算各激光雷达设备之间的姿态变换矩阵,并据此将所有点云数据转换为世界坐标系中的数据,从而实现对整个环境的全面精确建模[2]。其次,根据已知的激光雷达位置信息,将各激光雷达及其支撑结构从点云中剔除,以免对后续操作产生干扰。并根据待定位物体的不同特性而采取相应措施。在定位大型电力变压器时,要先裁剪掉点云数据中的地下部分,以免其对位置计算产生干扰;在定位地下空间时,要先裁剪掉点云的地上部分。最后,将剩余的点云数据投影到xoy平面上,从而将三维点云二维化,对激光雷达未能成像的区域进行插值估算,以获取物体投影的完整轮廓,并计算出轮廓中心坐标,从而完成吊装定位任务。
2 激光雷达应用于吊装定位的操作原理
2.1 点云重构
获取吊装环境的完整点云先要进行点云配准。点云配准技术是三维视觉领域的核心技术之一,在三维视觉应用系统中,许多下游任务往往依赖于高精度的三维配准过程。三维点云配准的本质是计算同一物体或场景在不同视点下采集到的点云数据之间变换关系,从而将这些数据统一到同一坐标系,并生成完整的点云模型。由于数据采集传感器的视角受限,单次测量仅能获取目标场景的部分数据,点云配准通过将多次测量所得的数据进行拼接,从而生成相对完整的点云,为后续的三维建模、目标识别及场景理解等任务提供数据支持。求解点云之间变换关系的前提是准确确定点云之间的匹配对应关系,一旦确定点对的匹配关系,便可通过几何变换方程求解出位姿变换矩阵。
2.1.1 配准原理。点云配准流程可转化为以下数学模型:假设在Rd空间内有两组对应的点p={p1,p2,K,pn}和q={q1,q2,K,qn},希望找到一个刚性变换,在最小二乘意义上最优地对齐两个点集,即寻找一个旋转矩阵R和一个平移向量t,具体见式(1)。
[(R,t)=argminR∈SO(d),t∈Rdi=1nωi||(Rpi+t)−qi||]" " " " (1)
式中:[ωigt;0]是对每个点的权重。
假设旋转矩阵R为常量,且定义目标函数[F(t)=i=1nωi||(Rpi+t)−qi|| 2],由文献[3]可知,[∂||x||22∂x=∂(xTx)∂x=2x] 。通过取F(t)关于t的倒数来计算其根,从而求解最优平移向量t,具体见式(2)。
[0=∂F∂t=i=1n2ωi(Rpi+t−qi)=2t(i=1nωi)+2R(i=1nωipi)−2i=1nωipi]" "(2)
定义点集P和点集Q的加权质心,见式(3)和式(4)。
[p=i=1nωipii=1nωi]" (3)
[q=i=1nωiqii=1nωi]" " " " " " " " " " "(4)
将式(3)和式(4)代入式(2)中,可得式(5)。
[t=q−Rp]" " " " " " " " "(5)
由此可知,最优平移向量t将被变换的点集P的加权质心映射到点集Q的加权质心。将t代入目标函数,可得式(6)。
[i=1nωi||(Rpi+t−qi)|| 2=i=1nωi||(Rpi+q−Rp−qi)|| 2 ][=i=1nωi||[R(pi−p)−(qi−q)]|| 2]" (6)
定义点集P和点集Q中各点与所在点集的加权质心坐标之差,见式(7)和式(8)。
[xi=pi−p] (7)
[yi=qi−q]" (8)
因此,寻找的最佳旋转矩阵R应当满足的条件见式(9)。
[R=argminR∈SO(d)i=1nωi||Rxi−yi|| 2]" (9)
对[||Rxi−yi|| 2]重新整理,可得式(10)。
[||Rxi−yi||2=xTixi−yTiRxi−xTiRyi+yTiyi]
[=xTixi−2yTiRxi+yTiyi]
(10)
将式(10)代入式(9)中,移除不依赖R的项,并改写为矩阵形式,可得式(11)。
[R=argminR∈SO(d)i=1nωi(xTixi−2yTiRxi+yTiyi)]
[=argminR∈SO(d)(−2i=1nωiyTiRxi)]" " " " " " " " "(11)
[=argminR∈SO(d)i=1nωiyTiRxi=tr(RXWYT)]
式中:W=diag(w1,w2,K,wn)是带加权对角元素wi的n×n对角矩阵;Y是以yi为列的d×n矩阵;X是以xi为列的d×n矩阵。矩阵的迹具有性质tr(AB)=tr(BA),据此有式(12)。
[tr(WYTRX)=tr[(WYT)(RX)]=tr(RXWYT)]" " "(12)
定义d×d的协方差矩阵S=XWY T,对其进行SVD分解,有S=USV T,代入式(12)中可得式(13)。
[tr(RXWYT)]=[tr(RS)]=[tr(RUSVT)]=[tr(RXWYT)]" (13)
根据迹的性质,V、R和U均为正交矩阵,则M=VTRU也为正交矩阵,M的列是正交向量,故对于M的每一列mj有m[Tj]mj=1,M的所有元素mij[≤]1。S是一个对角矩阵,具有非负元素σ1,σ2,…,σn≥0,ΣM的迹见式(14)。
[tr(ΣM)=]
[trσ1σ2⋱σnm11m11…m1dm21m22…m2d⋮⋮md1md2…mdn=i=1dσimii≤i=1dσi]" " " (14)
所以,根据正交约束,M为单位矩阵时,[tr(M)]的值取最大,由此可得式(15)。
[I=M=VTRU→V=RU→R=VUT] (15)
当[det(VUT)=1]时,R是旋转矩阵;当[det(VUT)=-1]时,R是反射矩阵。为确保R是旋转矩阵,则有式(16)。
[R=V11⋱1det(VUT)UT]" (16)
根据上述步骤,即可求得线性空间内两组对应点间的平移向量t和旋转矩阵R。
2.1.2 重构应用。常用的点云配准算法包括迭代最近点(Iterative Closest Point,ICP)算法、正态分布变换(Normal Distributions Transform,NDT)算法、特征匹配配准及基于学习的配准算法等。其中,ICP算法是一种经典的点云配准方法,由Besl和McKay于1992年提出,其通过迭代优化,最小化源点云与目标点云之间的距离。ICP算法适用于点云初始位置较为接近的情况,具有较高的配准精度,但其对初始位置较为敏感,且收敛速度较慢。自提出以来,ICP算法已衍生出多种变种。例如,Bouaziz等[4]提出的稀疏迭代最近点(Sparse ICP)算法,能更好处理异常值和不完整数据;Zhang等[5]提出的快速鲁棒ICP(Fast and Robust Iterative Closest Point)算法,利用安德森加速(Anderson Acceleration)来加速Majorization-Minimization(MM)算法的收敛速度;Zhou等[6]提出的全局迭代最近点(Global Iterative Closest Point, GoICP)算法,可直接对原始稀疏或稠密点云进行配准,不需要给定候选对应点,也不受初始化好坏的影响,从而克服ICP算法对初始位置敏感的问题。
在吊装定位过程中,激光雷达在安装后,其位姿是固定的,只要进行一次配准,即可获得各激光雷达点云之间的变换矩阵,且不需要后续更改。这样的工况不受ICP算法缺点的影响,且受益于ICP算法较高的配准精度。因此,将ICP算法应用于吊装定位中的点云配准工作是合理的选择。
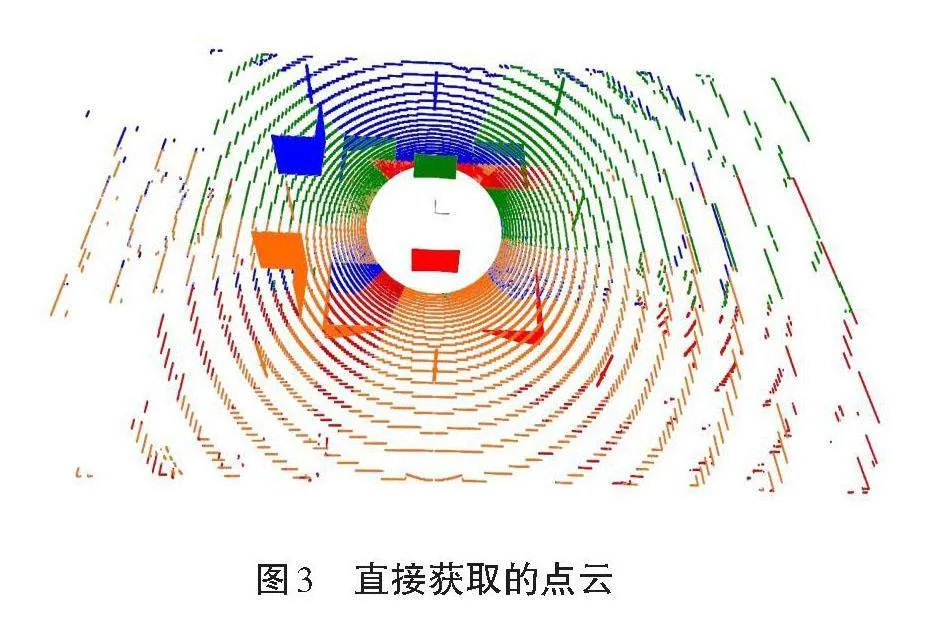
激光雷达获取的四幅点云如图3所示。由于每幅点云的坐标原点均位于相应的激光雷达设备,因此,当这些点云直接显示在同一空间中时,点云数据呈现出位置上的错乱和不一致。这种现象表明,各点云的相对位置尚未校正,需要对点云进行进一步处理和配准,确保其在统一的坐标系下实现精确对齐。
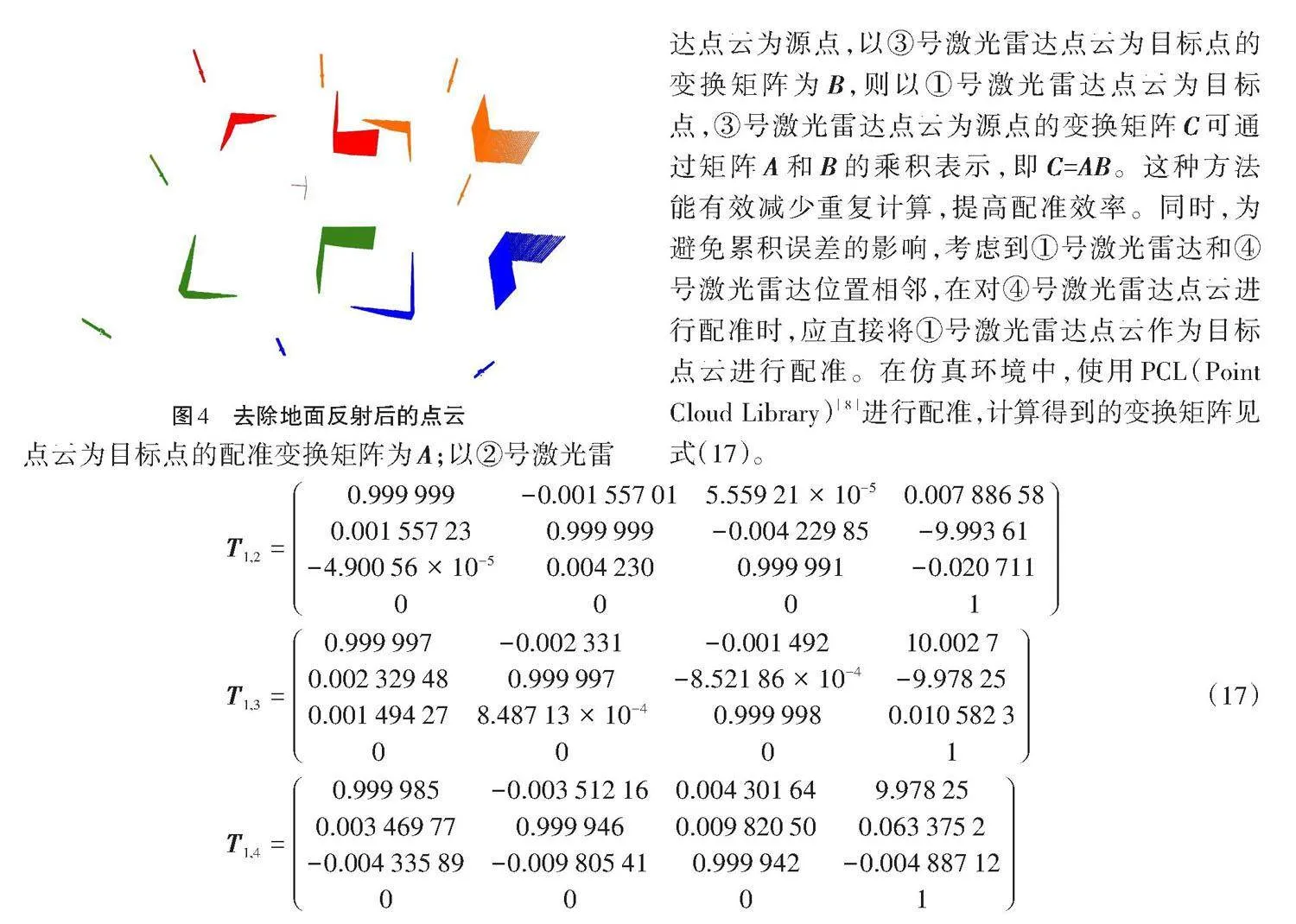
在激光雷达获取空间环境点云数据时,受地面反射效应影响,激光雷达对地面部分也进行成像。然而,受限于机械式激光雷达成像的特性,地面反射形成的点云呈现出以激光雷达为球心的球面与地面相交后所形成的圆形结构。这种反射模式在点云数据中保留了明显的圆形特征,反映出激光雷达成像过程中的几何关系。然而,这些圆形结构的对应关系与需要定位的电力变压器和地下空间在四幅点云中的对应关系并不一致,这意味着这些圆形结构可能对后续的点云配准过程产生干扰。为避免干扰产生的影响,要提前将这些圆形结构从点云中去除。考虑到所有圆形结构均位于同一平面内,可采用随机采样一致性算法(Random Sample Consensus,RANSAC)[7]对这些圆形结构进行平面拟合,并去除该平面附近的点云数据。经过去除处理后的点云如图4所示。
在去除地面反射结构后,点云即可用于配准操作。由于配准过程只能在点云对之间进行,可以利用线性空间中的过渡矩阵的传递性来减少计算量。假设以②号激光雷达点云为源点,以①号激光雷达
点云为目标点的配准变换矩阵为A;以②号激光雷达点云为源点,以③号激光雷达点云为目标点的变换矩阵为B,则以①号激光雷达点云为目标点,③号激光雷达点云为源点的变换矩阵C可通过矩阵A和B的乘积表示,即C=AB。这种方法能有效减少重复计算,提高配准效率。同时,为避免累积误差的影响,考虑到①号激光雷达和④号激光雷达位置相邻,在对④号激光雷达点云进行配准时,应直接将①号激光雷达点云作为目标点云进行配准。在仿真环境中,使用PCL(Point Cloud Library)[8]进行配准,计算得到的变换矩阵见式(17)。
[T1,2=0.999 999-0.001 557 015.559 21×10-50.007 886 580.001 557 230.999 999-0.004 229 85-9.993 61-4.900 56×10-50.004 2300.999 991-0.020 7110001T1,3=0.999 997-0.002 331-0.001 49210.002 70.002 329 480.999 997-8.521 86×10-4-9.978 250.001 494 278.487 13×10-40.999 9980.010 582 30001T1,4=0.999 985-0.003 512 160.004 301 649.978 250.003 469 770.999 9460.009 820 500.063 375 2-0.004 335 89-0.009 805 410.999 942-0.004 887 120001] (17)
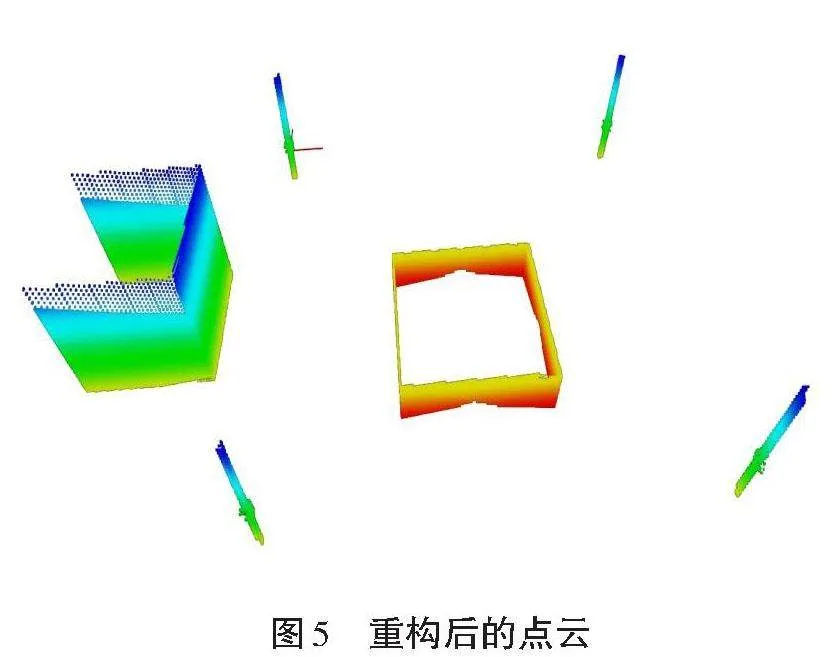
式中:矩阵T1,2表示以②号激光雷达点云为源,①号激光雷达点云为目标进行配准得到的变换关系;T1,3表示以③号激光雷达点云为源,①号激光雷达点云为目标进行配准得到的变换关系;T1,4表示以④号激光雷达点云为源,①号激光雷达点云为目标进行配准得到的变换关系。通过使用这些变换关系对点云进行重构,重构结果如图5所示。由图5可知,重构后的点云坐标系的原点位于①号激光雷达所在位置,重构后的点云能准确反映实际的吊装工作环境,为后续的处理提供基础的数据支持。
2.2 点云投影处理
直接处理三维点云数据较为复杂,且在吊装定位任务中,相较于z轴坐标,x轴和y轴坐标的位置信息更加重要。因此,可采用投影的方法,将三维点云转换为二维平面数据,在二维平面上分析和提取具体的位置信息,以简化处理过程,提高任务的精度与效率。为避免激光雷达支柱对点云数据产生干扰,考虑到实际工况中激光雷达的安装位置是已知的,可采用直通滤波器(Passthrough Filter)将点云数据中对应激光雷达及其支柱的部分进行滤除,提高点云分析的准确性。
在地平面以下的地下空间中,考虑到①号激光雷达的安装高度为1 m,因此,在以①号激光雷达为坐标原点的点云数据中,地下空间中的点的z轴坐标必定小于-1。而大型电力变压器则安装在地面上,其对应点的z轴坐标必定大于-1。这一特征可用于区分和筛选点云数据中的地下空间和地面上的电力变压器。为了减少误差产生的影响,将点云中z轴坐标小于-1.1的点视为地下空间部分,大于-0.90的点则视为电力变压器的部分。经直通滤波处理和简单的阈值分割后所得点云如图6所示,图中右侧区域为地下空间,左侧区域为电力变压器。在此基础上,可进一步进行投影操作,提取和分析二维空间中的位置信息。
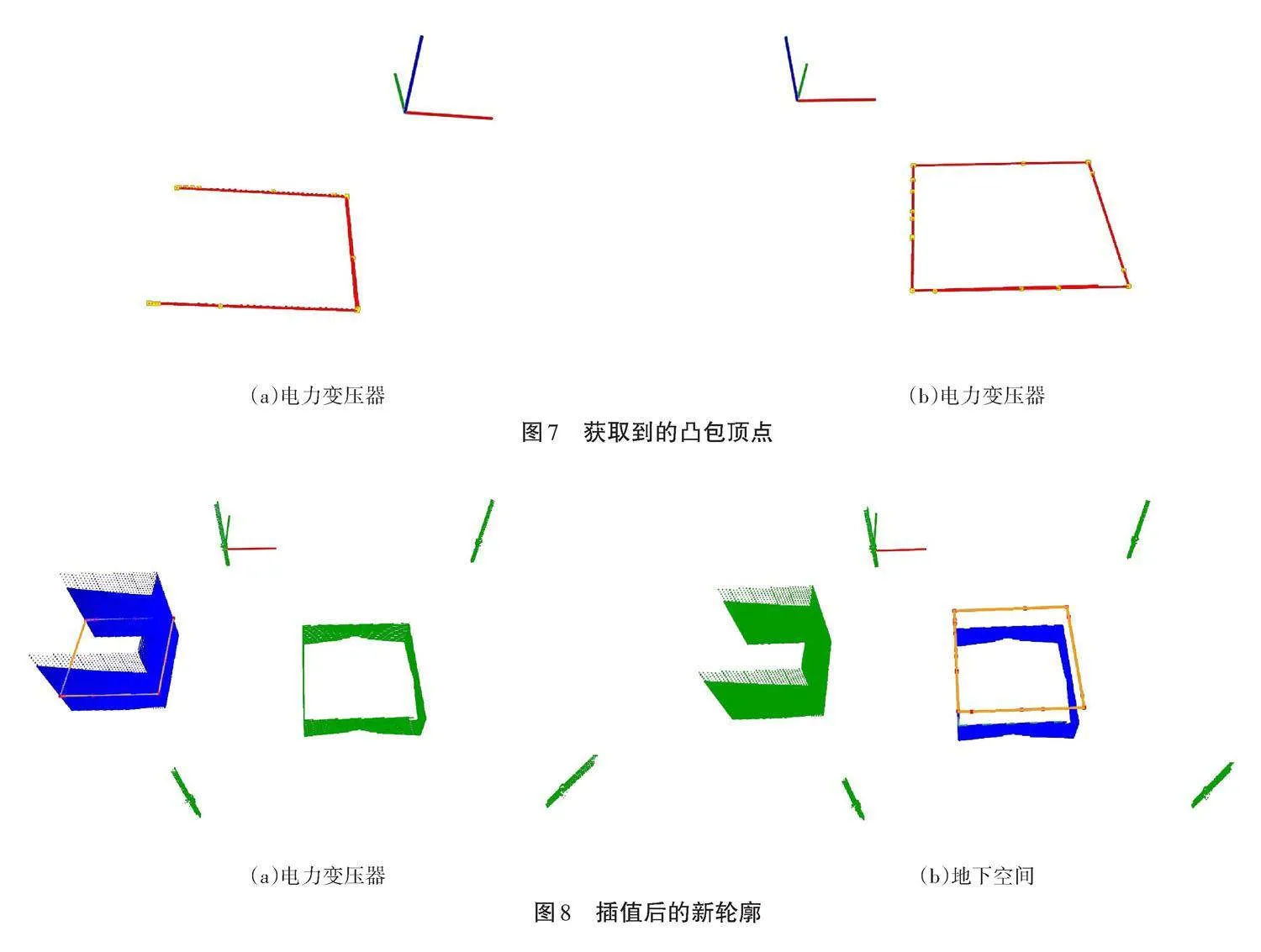
由图6可知,受激光直线传播特性、激光雷达扫描视角局限性及设备本身固有误差的影响,电力变压器远离坐标原点的一端未能完全被扫描进点云中。此外,尽管同一物体的高度相同部分在点云中应表现为一致的高度,但受上述因素的影响,在实际中的表现并不完全一致。这些问题会导致投影后的二维轮廓在不同部位的权重不均,进而影响中心点位置的准确计算。为减小这些因素的影响,本研究引入凸包和线性插值对投影得到的二维轮廓重新进行拟合,以提高结果的精确性。在二维平面上,凸包通过最小周长将给定的所有点包围,能在不受投影过程中局部点密度影响的情况下,有效地代表投影后的点云分布,该方法能准确描述点云的边界,确保后续分析的有效性和稳定性。使用Graham扫描算法[9]处理投影后的点云数据,获得的凸包顶点如图7所示。图中线框部分表示点云直接向z=0平面投影后形成的二维轮廓,可以看到轮廓的不同部位粗细并不相同;线框上加粗的点则为通过Graham扫描法处理二维轮廓得到的凸包顶点。
根据求得的凸包顶点,采用线性插值法,在相邻的凸包顶点之间,每隔0.01 m生成一个新点,使得凸包各点之间的距离更加均匀。重新生成的二维轮廓如图8所示,图中线框部分表示通过线性插值生成的新的二维轮廓。由图8可知,此时轮廓线的粗细已趋于均衡,不再受初始投影点云中不同位置点密度差异的影响。
将插值后轮廓中的所有点的坐标代入点云质心计算公式,具体见式(18)。
[PC=1n(i=0nxi,i=0nyi,i=0nzi)]" " " " " " " " (18)
根据上述方法,计算得到大型电力变压器中心在xoy平面中的坐标为[-2.987 08,-4.985 45]T,地下空间中心在xoy平面中的坐标为[-4.998 24,-4.986 03]T。在仿真环境中,大型电力变压器中心的真实坐标为[-3.000 00,-5.000 00]T,地下空间中心的真实坐标为[5.000 00,-5.000 00]T。通过对比发现,在5 m的坐标差范围内,激光雷达测得的中心坐标与真实坐标之间的差异在2 cm以内,优于传统的人工定位精度,表明该方法能满足大型电力变压器在吊装定位任务中的精度要求。
3 结语
激光雷达作为一种新兴的环境感知与测量设备,已被广泛应用于多个领域中。尤其是随着新能源车辆的快速发展,激光雷达的生产成本显著下降,使其经济性得到大幅提升。因此,在吊装定位工作中应用激光雷达成为一种合理且有效的解决方案。将激光雷达应用于吊装定位作业中有以下优点。
①高精度。激光雷达通过测量飞行时间(Time of Flight)可精确计算出距离,能提供厘米级甚至毫米级的定位精度,适用于需要高精度的场景,如大型设备的吊装定位。
②环境适应性好。激光雷达在不同光照条件下表现稳定,能在强光、黑暗或复杂的户外环境中正常工作,不受天气和光线变化的显著影响。
③三维空间感知。激光雷达可以生成精细的三维点云数据,提供丰富的空间信息,能准确描述物体的大小、形状和相对位置,为精确定位提供强有力支持。
④鲁棒性强。激光雷达在恶劣环境中具有较强的抗干扰能力,能在粉尘、雨雪等环境中稳定工作,保证定位的可靠性。
本研究详细介绍了激光雷达在大型电力变压器吊装定位中的应用步骤和技术原理,并在仿真环境中进行实际测试,结果显示,该方法能实现较高的定位精度。这表明激光雷达在吊装定位过程中具有显著的精度优势,能满足复杂工程环境下的精确定位需求,为大型设备的安全吊装和定位提供有效的技术支撑。
参考文献:
[1]RAJ T,HASHIM F H,HUDDIN A B,et al.A survey on LiDAR scanning mechanisms[J].Electronics,2020,9(5):741.
[2]GU X J,WANG X,GUO Y C.A review of research on point cloud registration methods[J].IOP Conference Series: Materials Science and Engineering,2020,782(2):1-9.
[3]BHATIA R.Matrix analysis[M].Berlin:Springer Science amp; Business Media,2013.
[4]BOUAZIZ S,TAGLIASACCHI A,PAULY M.Sparse iterative closest point[J].Computer Graphics Forum,2013,32(5):113-123.
[5]ZHANG J Y,YAO Y X,DENG B L.Fast and robust iterative closest point[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2021,44(7):3450-3466.
[6]ZHOU Q Y,PARK J,KOLTUN V.Fast global registration[C]//Computer Vision–ECCV 2016:14th European Conference,Amsterdam,The Netherlands,October 11-14,2016,Proceedings,Part II 14.Springer International Publishing,2016:766-782.
[7]DERPANIS K G.Overview of the RANSAC Algorithm[J].Image Rochester NY,2010,4(1):2-3.
[8]RUSU R B,COUSINS S.3D is here:Point Cloud Library (PCL)[J].IEEE,2011:1-4.
[9]GRAHAM R L.An efficient algorithm for determining the convex hull of a finite planar set[J].Information Processing Letters,1972,1(4):132-133.
猜你喜欢
软件工程(2024年7期)2024-12-31 00:00:00
河北工业科技(2024年6期)2024-02-13 00:00:00
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
计测技术(2020年6期)2020-06-09 03:27:12
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
石油化工建设(2018年2期)2018-07-11 01:24:56
石油化工建设(2017年5期)2018-01-26 07:07:03
石油化工建设(2015年4期)2015-12-01 04:17:02
