智能汽车行驶风险评估综述
2024-12-31 00:00:00沈传亮肖啸童言胡宏宇
汽车文摘 2024年8期





【摘要】智能汽车的驾驶环境具有高度不确定性和复杂性等特点,容易发生碰撞事故,导致乘员受伤或死亡。为了提高智能汽车的安全性,总结了当前用于评估其行驶风险的研究方法,包括基于确定性的方法、基于概率的方法和基于机器学习的方法。基于确定性的方法是一种传统的二分类预测方法,基于概率的方法可以对各种不确定性进行建模,基于机器学习的方法可以自动学习驾驶行为,从而更准确地评估行驶风险。未来的研究方向应该是结合3种方法的优点从而开发更加安全、可靠的自动驾驶系统。
关键词:智能汽车;风险评估;贝叶斯网络;机器学习
中图分类号:U461.91 """""""文献识别码:A"""""""" DOI: 10.19822/j.cnki.1671-6329.20230104
A Review of Driving Risk Assessment for Intelligent Vehicles
Shen Chuanliang, Xiao Xiao, Tong Yan, Hu Hongyu
(State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022)
【Abstract】The driving environment of intelligent vehicles often has high uncertainty and complexity, which can lead to accidents and injuries to passengers. In order to improve the safety of intelligent vehicles, three major research methods are currently used to evaluate their driving risks, including deterministic methods, probabilistic methods, and machine learning methods. Deterministic methods are traditional binary prediction methods, probabilistic methods can model various uncertainty, and machine learning methods can automatically learn driving behavior, making more accurate assessments of the risk of driving. Future research should combine the advantages of the three approaches to develop safer and more reliable autonomous driving systems.
Key words: Intelligent vehicles, Risk assessment, Bayesian network, Machine learning
0 引言
智能汽车在道路上行驶时,需要根据环境变化调整行驶策略(如避让行人、保持安全距离)。因此,评估行驶风险对于确保智能汽车的安全性至关重要。碰撞风险评估已经成为汽车安全领域的研究热点,良好的风险评估模型可以提前预判可能发生的风险事件,并及时警示驾驶员进行避撞调整或者使自动驾驶系统规划出安全的轨迹[3]。现有的研究方法可分为基于确定性的方法、基于概率的方法和基于机器学习的方法。这些方法各有优缺点,需要根据具体情况进行选择。风险因素可分为车辆内部风险因素和外部风险因素,每一类因素都可进行深入地研究,本文仅从汽车外部风险因素出发,先对智能汽车在行驶过程中可能遇到的风险事件进行归纳。然后,对目前用于自动驾驶碰撞风险评估的研究方法进行详细介绍和分析,以帮助研究者更好地了解和应用这些方法,进一步提高自动驾驶汽车的安全性能。最后提出未来风险评估方法的发展趋势。
1 风险事件分类
1.1 复杂驾驶场景分类
智能汽车可能在许多复杂的道路交通场景中行驶,包括但不限于以下情况:
(1)城市道路
城市道路是自动驾驶汽车最常见的路况。这种路况包括繁忙的交通、不同类型的道路用户(如行人、自行车、电动车、汽车等)和各种道路标志和信号灯。在这种环境中,智能汽车必须能够正确识别不同类型的道路用户,并遵循交通规则和信号灯,以确保安全行驶。
(2)高速公路
高速公路是智能汽车行驶的相对简单的道路环境。在这种路况下,车辆的速度较快,车流量大,但是没有交叉路口和红绿灯等复杂交通设施。智能汽车可以使用ADAS来保持车道、控制速度和保持安全距离,从而在高速公路上行驶。
(3)城市快速道路
城市快速道路是连接城市中心和周边地区的主要道路。在这种路况下,智能汽车需要能够高效地在快速道路上行驶,并能够识别出匝道、交叉口、拥堵等复杂的交通状况。
(4)交叉口和环岛
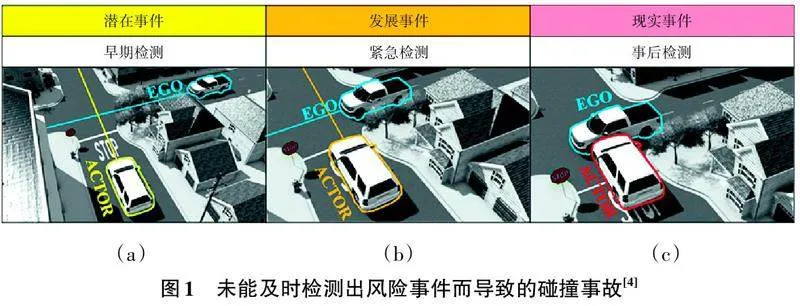
交叉口和环岛是道路中常见的交通设施,也是智能汽车遇到的一大挑战。智能汽车需要能够准确地识别交叉口和环岛,即使在视线被遮挡的情况下,也能预测可能出现的其他车辆和行人的行动,同时遵循交通规则和信号灯,安全地通过。图1为智能汽车在交叉口未能及时预测出风险事件从而导致碰撞事故。
1.2 风险因素分类
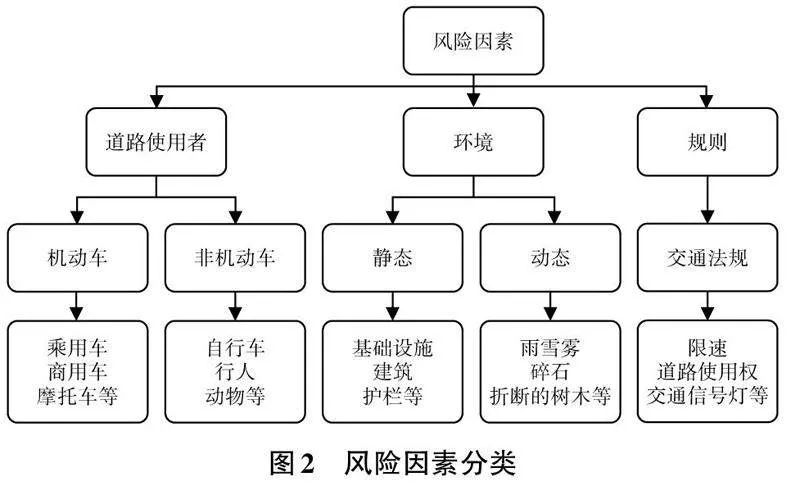
当智能汽车行驶在复杂的道路环境中时,可能面临诸多风险因素,可分为车辆的内部因素与外部因素。内部因素包括车辆自身状态因素,例如系统硬件和软件的故障,以及驾驶员因素,例如酒驾和疲劳驾驶。外部因素包括道路使用者因素、环境因素和规则因素。虽然内部因素是一个值得深入研究的问题,但是本文综述的重点是总结近年来与外部因素风险评估相关的研究进展。外部因素的分类见图2。
1.2.1 道路使用者因素
(1)机动车因素:包含了乘用车,商用车,摩托车等。该类别产生危险的原因主要是因为这些机动车辆的违规变道或突然地急刹,容易发生侧面碰撞以及追尾事故,并且还有可能因为避撞而进行的规避操作导致与其他车辆或者障碍物碰撞。但由于交通法规和道路结构的限制,使得机动车辆的行为往往具有可预测性。
(2)非机动车因素:此类别可包括自行车,行人,以及动物等。行人与自行车因素往往是由于其违反交通法规横穿马路或因为注意力不集中而导致碰撞事故,而动物则可能突然从路边冒出,使驾驶员或者自动驾驶汽车避让不及时,引发危险。这些危险因素因为其高度灵活的行为特点,使对其的风险预测变得十分困难。
1.2.2 环境因素
(1)静态环境因素:包括路边的基础设施,建筑,护栏,树木,指示牌,路灯,急转弯,陡峭的上下坡等。其特点为此类风险因素不会随时间而发生变化。
(2)动态环境因素:可分为天气状况以及路面条件,天气状况如雨、雪、雾、霾、沙尘暴等天气降低了能见度,并且雨雪还会使道路湿滑或者结冰,降低了路面的附着系数。路面条件除湿滑和结冰外,还可能会有碎石,折断的树木,凹凸不平的表面以及失去井盖的下水道口等。
1.2.3规则因素
此类因素主要是交通法规,包括了限速,道路使用权,交通信号灯等。驾驶员或者自动驾驶系统应当充分探测驾驶区域的交通法规,以免出现违规驾驶的风险。
2 风险评估方法分类
现有研究用于智能汽车行驶风险评估的方法众多,按照建模的方法和特点来的划分的话,可以分为基于模型驱动的方法和基于数据驱动的方法。模型驱动方法的建立是基于领域知识和物理模型等先验信息。模型驱动模型通常采用数学模型和物理模型等建模方法,通过对现象的描述和分析,推导出模型,并进行预测。数据驱动方法的建立是基于数据的统计规律和模式。数据驱动模型通常采用机器学习和统计学习等技术,通过对大量数据的学习和训练,生成模型并进行预测。将模型驱动方法进一步细分为基于确定性的方法和基于概率的方法,将数据驱动进一步划分为基于机器学习的方法。
2.1 基于确定性方法
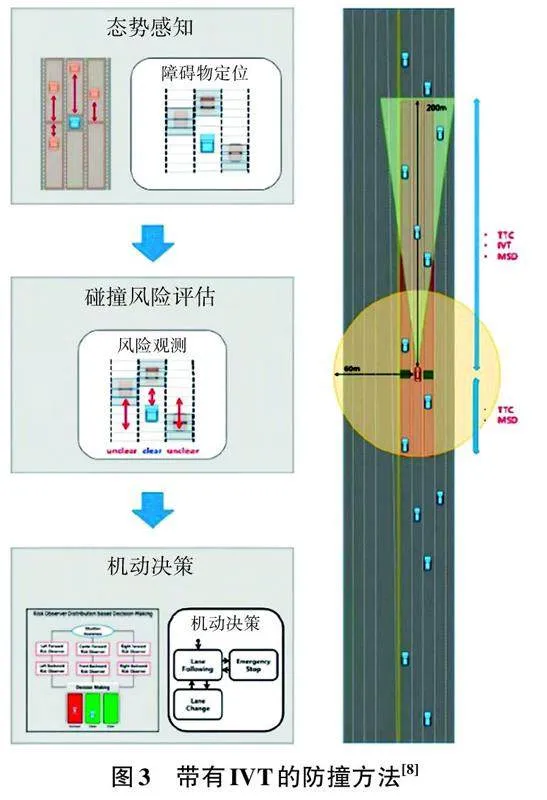
确定性方法利用基于规则的专家系统,能够通过各种威胁度量,如碰撞时间(Time To Collision, TTC)、制动时间(Time To Brake, TTB)、反应时间(Time To Response, TTR)、车头时距(Time Headway, THW)和最小安全距离(Minimum Safety Distance, MSD)等,将碰撞可能性估计为二元预测。TTC是一种广泛应用的威胁度量,它表示的是2个物体之间发生碰撞之前的时间。Hayward [5]在对自动紧急制动系统(Autonomous Emergency Braking, ABE)进行评价时,首次提出了TTC的概念。Brannstrom等[6]将TTC融入威胁评估算法中,提出了一种基于模型的算法,该算法可以估计车辆驾驶员如何转向、制动或加速以避免与任意物体发生碰撞。评估表明,该算法在追尾碰撞时,在自动驾驶制动激活的时机方面优于传统的威胁评估算法。Horst等[7]使用TTC度量来确定激活防撞系统(Collision Avoidance System, CAS)等驾驶员辅助系统的适当标准,用以防止高速公路上的追尾事故。TTC最常用的计算方法为相对车距除以相对车速,但是当前后两车保持匀速并且相对距离非常小的情况下计算出来的TTC接近无穷大,此时若将TTC作为评估风险的指标,则碰撞预警系统误以为车辆处境安全,且不采取制动措施进而极可能导致碰撞。
为了解决TTC所存在的问题,Noh等[8]提出了车辆间时间(In-Vehicle Time, IVT),它指在本车速度一定时,本车行驶了与前车相对距离相同的距离时所需的时间,因此,当相对距离较短,本车速度较高时,计算出的IVT较小,碰撞风险较高。由于TTC是基于相对速度计算的,而IVT是基于本车速度计算的,所以当两车保持相对匀速且距离较短时,IVT可作为TTC失效时的一个很好的补充,如图3所示。
另外除了上述两种威胁度量以外,Gelso等[9]提出一种包含道路信息的增强模型来预测CAS算法中的前方车辆制动行为,通过将TTB和制动威胁数(Brake Threat Number, BTN)度量引入事件检测策略当中,解决了在交通路口发生的与追尾碰撞(或临近碰撞)相关事件的危险预测高估问题。Tamke等[10]使用改进的二分类搜索算法实时查找TTS的近似值,并将其用于触发驾驶员辅助系统中的警告和紧急操作。Hillenbrand等[11]通过引入TTR,提出了一种多级碰撞缓解(Collision Mitigation, CM)方法,使其在潜在收益与驾驶员可接受性以及产品责任相关的风险之间进行灵活地权衡。vanWinsum等[12]研究了汽车跟驰中的THW以及制动反应,并从驾驶员选择THW的角度,探讨了行驶操作能力(如制动)与行为表现(如THW)之间的关联。Zhang等[13]介绍了一种新的威胁评估方法,名为Time-To-Last-Second-Braking(TLSB)。该方法将MSD作为威胁度量之一,可以直接客观地量化当前动态情况的危险或威胁等级,并评估所需避险动作(例如制动)的紧急性等级。
基于确定性方法的优势是简单直观,易于解释和理解。通过计算与车辆之间的时间和距离等因素,可以预测碰撞的可能性。这些方法不需要大量的数据和计算资源,因此可以在实时系统中使用。此外,这些方法可以用于开发自适应巡航控制系统和自动紧急制动系统等应用。
而基于确定性方法的劣势是忽略了很多复杂的因素,例如车辆的动态行为和交通环境等。这些方法很难处理非线性的交通场景,例如突然变道,交通拥堵等。此外,这些方法不能对未知的或不确定的因素进行建模,例如车辆的故障或驾驶员的行为等。
2.2 基于概率的方法
现有许多研究使用基于概率的方法来避免上述方法的不确定性问题。在汽车风险评估应用中,一些主要的不确定性来源包括动态建模误差、测量噪声和对驾驶员意图的误解。概率方法通常利用概率描述,通过使用车辆之间的时间和空间关系以及输入数据的不确定性来建立风险评估模型。常用的概率方法有贝叶斯网络,马尔科夫决策过程,蒙特卡洛等。许超凡[14]研究了智能汽车人机共驾时的驾驶权切换问题,他将驾驶环境风险影响因素分为驾驶人因素,车辆因素和环境因素,并将这些因素融入贝叶斯网络中用于建立驾驶环境风险等级评估模型,该模型不仅可以判断当前是否有条件进行驾驶权的移交,还可以实时监测驾驶过程中的总体风险大小,用以纠正驾驶员的不当驾驶行为(图4)。Li等[15]利用贝叶斯理论建模风险评估等级,然后用评估结果来设计基于强化学习的智能决策模型的奖励函数,以找到期望风险最小的策略。他们后来又用了另一种称为条件随机场的概率方法来评估碰撞风险,在3种驾驶场景中进行仿真,同时还考虑了驾驶风格,使避撞策略能够满足不同乘员的需求[16]。Noh[17]专门针对道路交叉口存在违规驾驶车辆的问题,提出了结合基于高精数字地图的轨迹预测和基于贝叶斯网络的风险评估的方法,并将其用于基于规则的车辆决策模型上,以更好地找到避撞行动策略。Yu等[18]为了解决传感器遮挡可能带来的安全隐患,使用将车辆建模为粒子并传播的概率方法,通过利用已知的道路布局来预测未观察到的车辆引起的风险(图5)。Althoff等[19]通过比较马尔科夫链和蒙特卡洛模拟两种方法的在不同驾驶场景中的性能,得出了蒙特卡洛模拟更适合作为碰撞风险评估模型的结论。Greene等[20]提出了一个用于车辆、行人和自行车早期碰撞预警系统的计算机架构。该系统使用了一个两阶段的碰撞风险评估过程,包括:(1)通过简单有效的几何计算进行初步评估,(2)通过复杂的统计推断计算更准确的碰撞概率。这个过程可以提供一个期望效用评估给用户界面,使得界面可以有针对性地选择何时向驾驶员或其他相关方发出警报。该架构的优点是计算效率高,可以在复杂的交叉口实时工作。Berthelot等[21]通过最小化距离函数,结合基于无迹变换(Unscented Transformation)的统计线性化方法,提出了一种新的碰撞概率计算方法。该方法灵活、精确且计算效率高,有助于降低系统干预的误报率。虽然作者提出的方法在模拟实验中得到了验证,但需要注意该方法仅考虑测量不确定性的正态分布情况,因此需要进一步研究交通参与者行为预测的不确定性因素对该方法的影响。Katrakazas[22]开发了一个新的碰撞风险模型来评估自动驾驶车辆的碰撞风险。作者将车辆级别的碰撞预测方法与交通工程师研究中的网络级别碰撞预测相结合,以提高道路安全性。采用了交互感知运动模型,并使用动态贝叶斯网络(Dynamic Bayesian Network, DBN)来描述每个车辆的运动和车辆之间的交互。通过集成车辆级别和网络级别信息,作者发现在危险的交通条件下,交互感知模型可以显著提高检测危险驾驶车辆的能力。Xu等[23]使用到达前方时间(time-to-front)来评估风险分数,其定义为到达碰撞点的剩余时间,然后使用经验定制的指数函数将该分数映射为风险概率。基于估计的风险,他们提出了一个马尔可夫决策过程,其目标是最小化预期风险回报,作为避撞控制的行动策略。
这些基于概率的方法的优点是(1)可以处理不确定性的信息,并将其量化为概率分布的形式,从而更好地反映风险评估结果的可靠性。(2)可以将多种不同的因素考虑进来,如环境、车速、道路状况、行驶行为等,从而提供更全面和准确的风险评估结果。(3)可以在新情况下进行自适应,并根据新的数据进行模型调整和更新,从而提高评估结果的准确性和实用性。不过这些方法也存在一些限制,比如:(1)需要大量的数据进行训练和计算,从而需要大量的计算资源和存储空间,这会增加实现成本和复杂性。(2)通常基于一些假设和模型前提,如果这些假设和前提不准确,可能会导致评估结果的偏差和误差。(3)通常基于线性和简单的模型,对于非线性和复杂的情况,处理起来较为困难,需要更加复杂和高级的方法来处理。
2.3 基于机器学习的方法
传统的基于确定性的方法和基于概率的方法都存在一定的局限性,难以处理复杂的交通场景。基于机器学习的方法由于其能够从大量数据中自动学习模式和规律,并能够处理非线性和复杂的数据,已经成为智能汽车行驶风险评估领域的一个重要研究方向。基于机器学习的方法一般需要采取以下6个步骤。
(1)数据采集与预处理:基于机器学习的方法需要大量的数据进行训练和学习,因此需要对车辆和行人的行为进行数据采集,并对数据进行预处理,例如去除噪声、对数据进行归一化等。
(2)特征提取:对于采集到的数据,需要通过特征提取的方式将其转换成机器学习算法可处理的形式。常用的特征包括车辆和行人的速度、加速度、加速度变化率、距离等等。
(3)算法选择:根据具体的问题和数据特点,选择适合的机器学习算法,如支持向量机(Support Vector Machine, SVM)、决策树、随机森林、神经网络等。这些算法都有不同的优势和适用范围。
(4)训练模型:在选择算法后,需要将数据划分为训练集和测试集,用训练集训练模型,并用测试集测试模型的性能,以选择最优的模型。
(5)模型评估和调优:完成模型训练后,需要对模型进行评估和调优,以提高预测性能和准确性。可以使用一些指标来评估模型性能,如准确率、召回率、F1分数等。
(6)模型应用:完成模型训练和评估后,可以将模型应用于实际场景中,用来评估车辆行驶风险,并做出相应的决策和控制。
为了应对在数据集中缺乏标记的驾驶数据以及在描述不同行驶风险级别时存在类不平衡的问题,Hu等[24]研究了一种代价敏感的半监督深度学习方法,该方法将CNN-LSTM组成的网络嵌入到半监督框架中(图6),以实现用较少的标记数据去标记大量的未标记数据,并且还开发了自适应过平衡交叉熵函数来保持高风险类别的过平衡状态,从而实现代价敏感的学习。实验证明该方法可以较好地预测当前以及未来2s内的风险分数。为了准确预测城市主干道的实时碰撞风险,Li等[25]提出了一种LSTM-CNN并行组合方式的神经网络(图7),LSTM可以捕获长期相关性,而CNN提取时间不变特征,相比于顺序LSTM-CNN的组合方式,该神经网络在ROC曲线下面积(Area Under Curve, AUC)值、灵敏度和误报率方面更优。Shangguan等[26]考虑了在主动变道过程中驾驶员意图识别的重要性,此外还有左变道和右变道之间的风险差异,基于此,他们提出了结合驾驶员意图识别与变道风险评估的框架,该框架采用具有时间序列输入的LSTM神经网络来识别驾驶意图,然后应用轻量级梯度提升决策树模型(Light Gradient Boosted Machine, LGBM)算法预测变道风险。由于图结构可以更好地表示数据之间的关系和交互,Yu等[27]采用场景图作为中间表示,并以多关系图卷积网络(Multi-Relational Graph Convolutional Networks, MR-GCN)作为空间模型处理单个场景图得到空间嵌入,然后将视频片段中经过预处理的空间嵌入序列输入到由LSTM建立的时间模型中得到时空嵌入,再输入到多层感知器(Multilayer Perceptron, MLP)中获得最终的风险评估的结果(图8)。此外,作者还在空间模型和时间模型中添加了注意力机制,提高了模型的可解释性。在随后的工作中[28],他们对此模型进行了更深入的研究,提出了SG2VEC算法,证明了从合成的训练数据集向用于测试的真实世界数据集的转移过程中,该模型性能的降低程度要低于其他的模型,并且在NVIDIA Drive PX 2平台上的推理速度比其他的快了9.3倍。Chen等[29]针对由于神经网络的连接系数阵列和阈值的选择具有很大的随机性,以导致在建模过程中很容易出现局部优化问题,为了克服这个问题,并有效地找到全局优化的能力,他们选择使用遗传算法来优化BP神经网络的系数阵列和阈值,从而提出了基于遗传算法优化神经网络的碰撞预测模型CPGN,用以对追尾碰撞的预测。Peng等[30]提出了一个LSTM框架,用于在联网车辆环境下提取驾驶员的风险行为并基于实时基本安全信息(Basic Safety Message, BSM)数据序列预测车辆碰撞风险,并通过在南昌至九江智能高速公路沿线的试验台上进行的研究进行了说明和评估。Liu等[31]提出了一种新的基于时间位移和空间注意力机制的双流网络(TSSAT-Net),同时提出了一种新的数据集和相关的风险评估方法(图9)。为了考虑实际驾驶经验和场景复杂度这两个主要因素,作者将交通场景分成四个不同的风险等级,然后使用TSSAT-Net进行判断。TSSAT-Net由一个以RGB图像为输入的空间流网络和一个以光流为输入的时间流网络组成。该方法可以实现较高的分类准确度。Shi等[32]提出了一种面向自动驾驶车辆的自动化机器学习(AutoML)方法,用于风险预测和行为评估。它能够通过从车辆运动和传感数据中学习,预测详细的风险等级和相应的行为特征。该方法包括3个主要组件:通过代理风险指标和大数据聚类进行无监督风险识别、基于XGBoost的特征学习以及贝叶斯优化指导下的模型自动调整。该方法可用于风险决策和运动轨迹规划,并可为自动驾驶系统设计提供数据驱动的见解。
基于机器学习的方法在智能汽车行驶风险评估中具有显著的优点。首先,机器学习方法能够自动学习复杂的非线性关系,可以从大量的数据中提取特征并进行有效的分类或回归。其次,机器学习模型能够动态适应不同的环境和场景,可以在不同的驾驶情境下进行预测和决策,具有较好的泛化性能。此外,机器学习方法能够实现高精度的碰撞风险评估,并在实时性和准确性之间取得平衡,能够在紧急情况下及时发出警报或采取避险措施,提高了行车安全性和驾驶舒适性。
然而,基于机器学习的方法也存在一些缺陷。首先,需要大量的数据集进行训练,这意味着需要大量的人力、物力和财力投入。其次,训练得到的模型的可解释性较差,难以提供对决策的解释和理解。此外,机器学习模型容易受到数据分布的影响,如果测试数据与训练数据分布不同,模型性能可能会急剧下降。因此,在实际应用中,需要充分考虑训练数据集的特征、数量和质量,以及模型的可解释性和鲁棒性。
3 未来展望
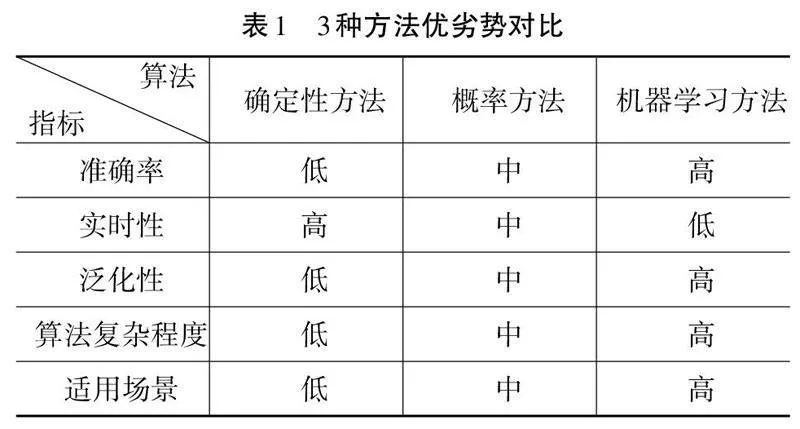
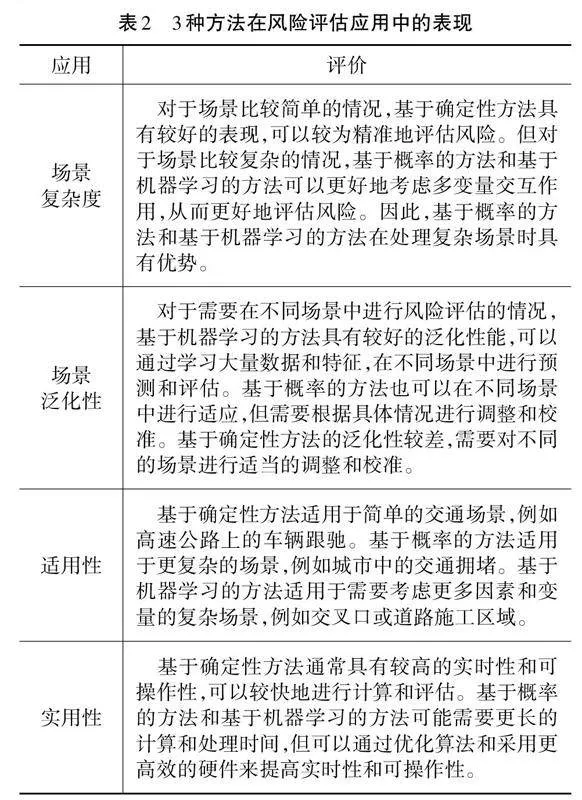
3种风险评估方法的优劣势对比以及在风险评估应用中的表现分别见表1、表2。未来智能汽车行驶风险评估的发展趋势是融合3种方法、取长补短,使得风险评估更加准确和可靠,比如可以将基于确定性方法的计算效率,基于概率方法的数学严谨性和不确定性传播,以及基于机器学习方法的学习能力相结合。在实际应用中,可以根据不同的场景和任务选择合适的方法或者将它们组合起来使用。同时,也需要进一步研究和解决方法融合的问题。
4 结束语
针对智能汽车行驶中面临的复杂道路环境和多样化的风险因素,本综述对目前主流的3种行驶风险评估方法进行了介绍和分析,即基于确定性的方法、基于概率的方法以及基于机器学习的方法。这些方法各自具有一定的优缺点,在实际应用中需要根据具体情况进行选择和综合运用,以达到更加准确和可靠的风险评估结果。特别是,基于机器学习的方法在智能汽车领域的应用逐渐增多,并取得了显著的成果,然而其不足之处也需要引起注意。因此,综合运用3种方法并发挥各自的优势,是未来智能汽车行驶风险评估的发展趋势。为了实现更加安全和高效的智能汽车行驶,未来的研究应该着重于数据采集、算法优化以及算法集成等方面,以构建更加完善的风险评估框架。
参考文献
[1] ZONG F, ZENG M, LV J Y, et al. A Credit Charging Scheme Incorporating Carpool and Carbon Emissions[J]. Transportation Research Part D-Transport and Environment, 2021, 94(5): 102711.
[2] DAHL J, DE CAMPOS G R, OLSSON C, et al. Collision Avoidance: A Literature Review on Threat-Assessment Techniques[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(1): 101-113.
[3] ZONG F, HE Z B, ZENG M, et al. Dynamic Lane Changing Trajectory Planning for CAV: A Multi-Agent Model with Path Preplanning [J]. Transportmetrica B-Transport Dynamics, 2022, 10(1): 266-292.
[4] XIAO D N, DIANATI M, GEIGER W G, et al. Review of Graph-Based Hazardous Event Detection Methods for Autonomous Driving Systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2023,24(5): 4697-4715.
[5] HAYWARD J C. Near Miss Determination Through Use of a Scale of Danger[J]. Highway Research Record, 1972, 384: 24-34
[6] BRANNSTROM M, COELINGH E, SJOBERG J. Model-Based Threat Assessment for Avoiding Arbitrary Vehicle Collisions [J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 658-669.
[7] HORST R, HOGEMA J. TIME-TO-COLLISION AND COLLISION AVOIDANCE SYSTEMS[C]//Proceedings of 6th ICTCT Workshop Salzburg, 1994.
[8] NOH S, HAN W Y. Collision Avoidance in On-Road Environment for Autonomous Driving[C]//Proceedings of the 14th International Conference on Control, Automation and Systems (ICCAS), South Korea: IEEE, 2014.
[9] GELSO E R, SJOBERG J. Consistent Threat Assessment in Rear-End Near-Crashes Using BTN and TTB Metrics, Road Information and Naturalistic Traffic Data[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(1): 74-89.
[10] TAMKE A, DANG T, BREUEL G, et al. A Flexible Method for Criticality Assessment in Driver Assistance Systems[C]//Proceedings of the IEEE Intelligent Vehicles Symposium (IV), 2011.
[11]HILLENBRAND J, SPIEKER A M, KROSCHEL K. A Multilevel Collision Mitigation Approach-Its Situation Assessment, Decision Making, and Performance Tradeoffs[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 528-540.
[12] VANWINSUM W, HEINO A. Choice of Time-Headway in Car-Following and the role of Time-To-Collision Information in Braking [J]. Ergonomics, 1996, 39(4): 579-592.
[13] ZHANG Y, ANTONSSON E K, GROTE K. A New Threat Assessment Measure for Collision Avoidance Systems[C]//Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, 2006.
[14] 许超凡. 基于贝叶斯网络的智能汽车驾驶环境风险等级评估研究[D]. 长沙: 湖南大学, 2021.
[15] LI G F, YANG Y F, LI S, et al. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness[J]. Transportation Research Part C-Emerging Technologies, 2022, 134.
[16] LI G F, YANG Y F, ZHANG T R, et al. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios [J]. Transportation Research Part C-Emerging Technologies, 2021, 122(1): 103452.
[17] NOH S. Decision-Making Framework for Autonomous Driving at Road Intersections: Safeguarding Against Collision, Overly Conservative Behavior, and Violation Vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3275-3286.
[18] YU M Y, VASUDEVAN R, JOHNSON-ROBERSON M. Occlusion-Aware Risk Assessment for Autonomous Driving in Urban Environments [J]. IEEE Robotics and Automation Letters, 2019, 4(2): 2235-2241.
[19] ALTHOFF M, MERGEL A. Comparison of Markov Chain Abstraction and Monte Carlo Simulation for the Safety Assessment of Autonomous Cars [J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1237-1247.
[20] GREENE D, LIU J, REICH J, et al. An Efficient Computational Architecture for a Collision Early-Warning System for Vehicles, Pedestrians, and Bicyclists [J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 942-53.
[21] BERTHELOT A, TAMKE A, DANG T, et al. Handling Uncertainties in Criticality Assessment[C]//Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), 2011.
[22] KATRAKAZAS C. Developing an advanced collision risk model for autonomous vehicles [D]. Loughborough: Loughborough University, 2017.
[23] XU H Z, GAO Y, YU F, et al. End-to-end Learning of Driving Models from Large-scale Video Datasets [C]//Proceedings of the 30th IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[24] HU H Y, WANG Q, CHENG M, et al. Cost-Sensitive Semi-Supervised Deep Learning to Assess Driving Risk by Application of Naturalistic Vehicle Trajectories[J]. Expert Systems with Applications, 2021, 178(9): 115041.
[25] LI P, ABDEL-ATY M, YUAN J. Real-Time Crash Risk Prediction on Arterials Based on LSTM-CNN[J]. Accident Analysis and Prevention, 2020, 135(2): 105371.
[26] SHANGGUAN Q Q, FU T, WANG J H, et al. A Proactive Lane-Changing Risk Prediction Framework Considering Driving Intention Recognition and Different Lane-Changing Patterns[J]. Accident Analysis and Prevention, 2022, 164: 106500.
[27] YU S Y, MALAWADE A V, MUTHIRAYAN D, et al. Scene-Graph Augmented Data-Driven Risk Assessment of Autonomous Vehicle Decisions [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7941-7951.
[28] MALAWADE A V, YU S Y, HSU B, et al. Spatiotemporal Scene-Graph Embedding for Autonomous Vehicle Collision Prediction [J]. IEEE Internet of Things Journal, 2022, 9(12): 9379-9388.
[29] CHEN C, XIANG H Y, QIU T, et al. A Rear-End Collision Prediction Scheme Based on Deep Learning in the Internet of Vehicles [J]. Journal of Parallel and Distributed Computing, 2018, 117: 192-204.
[30] PENG L Q, WANG Y T, ZHANG F, et al. Evaluation of Emergency Driving Behaviour and Vehicle Collision Risk in Connected Vehicle Environment: A Deep Learning Approach [J]. IET Intelligent Transport Systems, 2021, 15(4): 584-94.
[31] LIU C S, LI Z J, CHANG F L, et al. Temporal Shift and Spatial Attention-Based Two-Stream Network for Traffic Risk Assessment [J]. Ieee Transactions on Intelligent Transportation Systems, 2022, 23(8): 12518-12530.
[32] SHI X P, WONG Y D, CHAI C, et al. An Automated Machine Learning (AutoML) Method of Risk Prediction for Decision-Making of Autonomous Vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7145-7154.
猜你喜欢
科技传播(2017年5期)2017-04-25 23:28:30
电子技术与软件工程(2017年3期)2017-03-22 02:18:00
科技资讯(2016年25期)2016-12-27 16:22:32
南水北调与水利科技(2016年5期)2016-12-27 12:04:04
科技创新与应用(2016年31期)2016-12-03 03:33:48
时代金融(2016年27期)2016-11-25 17:51:36
科教导刊(2016年26期)2016-11-15 20:19:33
软件导刊(2016年9期)2016-11-07 17:50:19
科学与财富(2016年28期)2016-10-14 21:19:17
计算技术与自动化(2015年3期)2015-12-31 17:14:47