基于专利分析的高精度地图技术研究
2024-12-31 00:00:00李健明李根马宇宸
汽车文摘 2024年8期






【摘要】利用专利分析方法,构建高精度地图技术的技术分解体系,在充分进行专利数据加工处理的基础上,从专利申请态势、专利申请人分布、专利技术构成方面分析高精度地图技术的专利技术发展现状与竞争格局,并针对高精度地图技术的重点分支技术领域的发展情况进行梳理,最终提出高精度地图技术的发展建议。
主题词:自动驾驶 "高精度地图 "定位技术 "专利分析
中图分类号:U469.5+3"""""""""" 文献识别码:A"""""""""" DOI: 10.19822/j.cnki.1671-6329. 20220064
Research on High Definition Map Technologies Based on Patent Analysis
Li Jianming Li Gen Ma Yuchen
(1. China Auto Information Technology (Tianjin) Co., Ltd., 300300; 2. Beijing Didi Infinite Technology Development Co., Ltd, 100089)
【Abstract】Using the patent analysis method, this paper constructs the technical decomposition system of high definition map and localization technology. On the basis of full patent data processing, this paper analyzes the patent technology development status and competition pattern of high definition map and localization technology from the aspects of patent application situation, patent applicant distribution, patent technology composition. It combs the development of key branches of high definition map and localization technologies, and finally puts forward some suggestions for the development of high definition map and localization technologies.
Keywords: Autonomous driving, High definition map, Localization, Patent analysis
1 前言
在以汽车新四化为特征的汽车产业进化趋势下,自动驾驶汽车成为全球的重要研究热点和汽车产业发展战略方向[1]。高精地图作为自动驾驶重要的共性基础技术,具备不可替代的作用,对于L3级别以上的自动驾驶汽车而言,高精地图更是必备选项[2]。一方面,高精地图是自动驾驶汽车规划道路行驶路径的重要基础,能为车辆提供定位、决策、交通动态信息等依据[3]。另一方面,当自动驾驶汽车传感器出现故障或者周围环境较为恶劣时,高精地图也能确保车辆的基本行驶安全。随着行业的发展,更多的ADAS系统开始应用高精地图,以增强超视距感知、提升规划能力[4]。
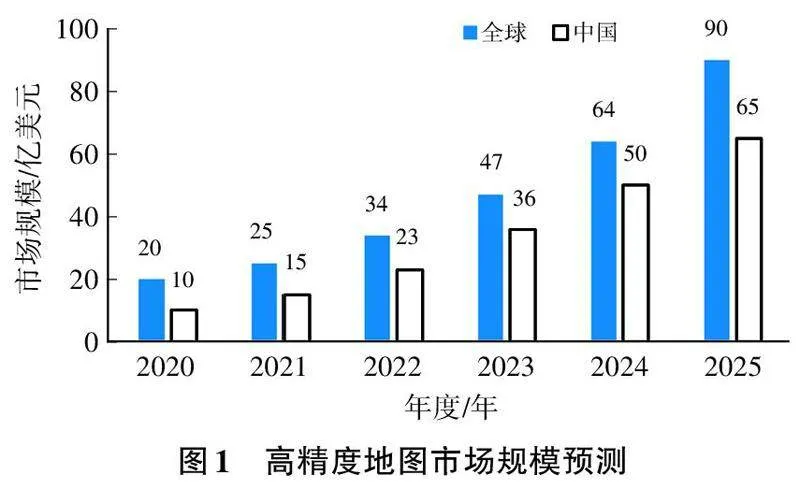
随着自动驾驶技术日趋成熟,高精度地图的市场规模正急剧扩张[5]。2021年以后,随着L3车型密集上市,更多的自动驾驶汽车搭载高精度地图,高精度地图市场规模将实现快速增长。根据ICVTank对高精度地图市场的预测,到2025年,全球高精度地图市场规模将扩大到90亿美元,中国高精度地图市场会达到65亿美元(图1)。
本文基于专利数据,以全景模式揭示高精度地图技术产业发展现状、未来发展趋势及基本方向。同时,将以近景模式整理汇总高精度地图技术关键细分领域的专利布局特点与技术发展情况,为相关企业在高精度地图技术领域的研发规划提供参考。
2 专利分析方法与数据来源
本文利用专利导航技术进行高精度地图技术专利分析,通过对高精度地图进行技术分解与专利数据加工处理,利用相关专利宏观发展情况,从专利申请趋势、技术构成、申请人分布等方面解读技术发展现状、产业格局,并基于上述分析得出高精度地图技术发展建议。
2.1 技术分解与专利数据加工处理
针对高精度地图技术研究现状,将高精度地图技术细分为地图资料采集处理软硬件技术、地图逻辑构建技术、地图质量保障技术、自动驾驶地图服务、定位技术等6个二级技术分支,在二级技术分支的基础上再次进行技术分析形成14个三级技术分支(表1)。在各级技术分支的基础上进行专利检索式的构建并进行检索(专利检索公开日截止到2020年12月31日)。在专利初步检索完成后,通过人工标引进行专利数据深度处理,共计处理专利数据5 000余件。
2.2数据来源
本文专利数据来源于全球汽车专利大数据平台AutoPat。AutoPat是中汽信息科技自主开发的汽车行业唯一专业性专利数据库。该服务平台收录了全球104个国家或地区的汽车相关专利,专利数据包含著录项目、摘要、专利全文、引证信息、同族信息、法律状态、转让许可质押等信息,内容丰富全面;且日、韩、德、俄、法等11个国家的小语种具有英文翻译,方便阅读;库内数据每周至少更新2次,及时性强。作为专业性的汽车专利数据库,AutoPat涵盖高精度地图技术的多级技术节点,并对相关专利进行了人工标引,数据全面准确,为此次专利分析项目奠定了良好的基础。
3 高精度地图技术专利分析
3.1 专利总体申请趋势分析
高精度地图技术发展迅速,专利申请量快速提升,申请人规模扩大,具有较大的发展动力。
如图2所示,2015年之前高精度地图技术处于初步发展阶段,专利申请量较低,申请趋势平缓,该阶段内相关专利申请人数量波动较弱,研究主体相对稳定;2015年起随着我国智能网联汽车技术的发展,高精度地图技术在自动驾驶技术体系中的作用开始凸显,高精度地图技术进入快速发展阶段,该时期专利申请量与公开量快速上升,同时相关技术申请人规模扩大,有较多新入局企业,技术方向开始向多元化发展,针对高精度地图技术的研发手段与应用场景不断丰富,具有较大的发展动力。
3.2 技术构成分析
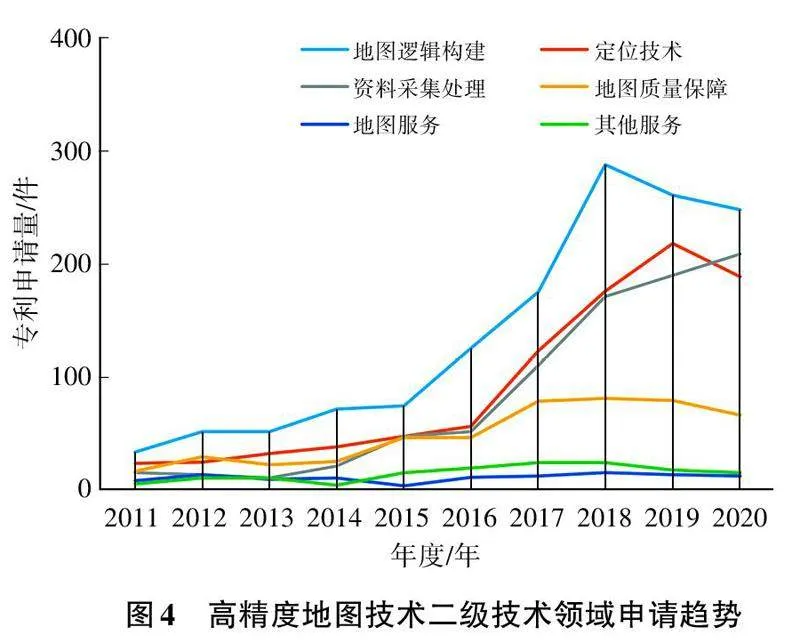
专利申请集中布局地图构建逻辑技术、定位技术、资料采集处理等领域。其中,定位技术与资料采集处理技术发展势头强劲。
当前高精度地图技术专利专利布局中,地图逻辑构建技术具有最大的专利申请量,依托于传统地图构建技术的积累,高精度地图技术发展早期,地图构建逻辑技术最先发力,申请量逐步提升,但近年来申请趋势开始呈现下降趋势。定位技术与资料采集处理技术在自动驾驶地图与定位技术中的申请量分居2、3位,专利申请量大致相等。其中,定位技术是自动驾驶地图技术的重要应用方向,能够直接为高阶自动驾驶提供精确的决策依据助力自动驾驶技术的发展,而资料采集处理技术是构建自动驾驶地图的必要前提,随着我国地图采集权限的逐步开放,资料采集处理技术快速发展。同时从专利申请趋势来看,定位技术与资料采集技术具有更为强劲的申请势头,随着我国自动驾驶技术的进一步应用与地图采集资质的进一步放开,预计定位技术与资料采集技术会得到进一步发展。地图质量保障技术专利申请趋势相对稳定,这与当前自动驾驶地图还未进入大规模应用正相关,在未来自动驾驶地图大规模应用场景下势必会增加对于地图质量保障的需求,预计地图质量保障技术的发展还需自动驾驶地图大规模应用的刺激。地图服务与其他服务发展目前还处于萌芽期,相关技术的发展同样需要依托于自动驾驶地图技术的规模化应用。
3.3 专利申请人分布分析
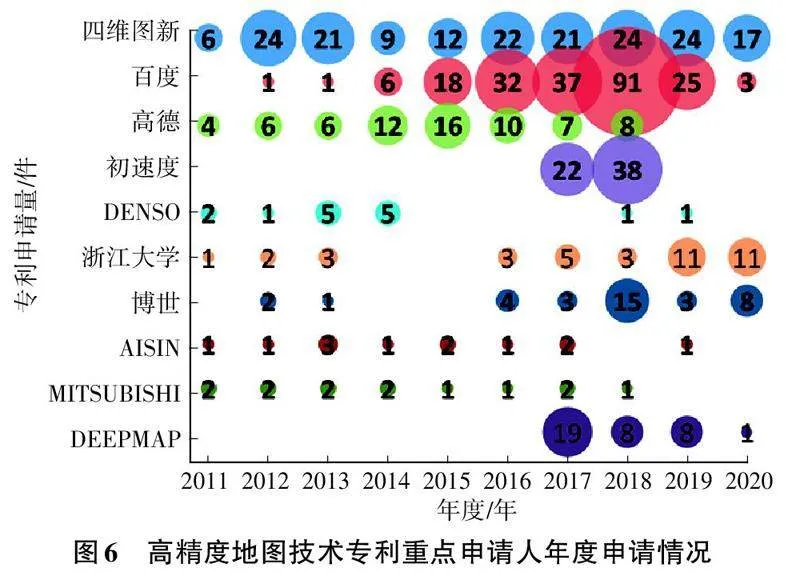
高精度地图技术领域四维图新具有最大的专利申请量,百度申请量紧随其后处于第2位。高精度地图技术领域的头部申请人类型以企业申请人为主,排名前10的申请人中仅浙江大学为科研机构,企业申请人中传统图商明显具有专利申请优势,四维图新、百度专利在该领域的专利申请量均超多200件处于第1梯度,而高德申请量为78件领衔第2申请人梯队。汽车行业传统供应商电装、博世、爱信等申请人与初速度、DEEPMAP等科技新势力申请人专利申请量明显低于传统图商企业,在专利技术积累中尚存在一定的差距(图5)。
四维图新持续研发方面占据较大优势,百度近年来研发投入明显提升。从重点申请人的年度申请情况分析,四维图新在自动驾驶地图与定位领域具有较大的持续研发优势,在该领域持续产出专利成果。百度在该领域的研发力度呈现逐步提升趋势,近年来的专利申请快速提升显示出百度在该领域研发力度的逐步加大。高德地图在自动驾驶地图与定位领域研发明显弱于第一梯队研发情况,近2年并没有研发产出,相关技术主要依托前期积累。而初速度与DEEPMAP等科技初创公司在成立之初均有较大的专利产出,为企业在自动驾驶地图与定位领域立足保驾护航,但从在该领域的持续研发情况分析,DEEPMAP的持续研发情况优于初速度。浙江大学方面,近2年的专利产出均在10件以上,相关专利主要集中在SLAM领域。传统供应商方面,除博世外其余重点申请人年度产出量较低,专利申请呈现多年低量申请状态,可见相关企业并未将高精度地图技术设置为重点研究方向,而博世近年来专利产出较前期明显提升,表明高精度地图技术在博世研发体系中的研发地位得到一定的重视与提升(图5)。
3.4 重点技术节点分析
高精度地图技术相关专利主要分布在地图逻辑构建技术、定位技术、资料采集处理、地图质量保障等二级技术分支,本节内容针对重点二级技术分支的技术构成情况与专利申请趋势展开分析。
3.4.1 地图逻辑构建技术
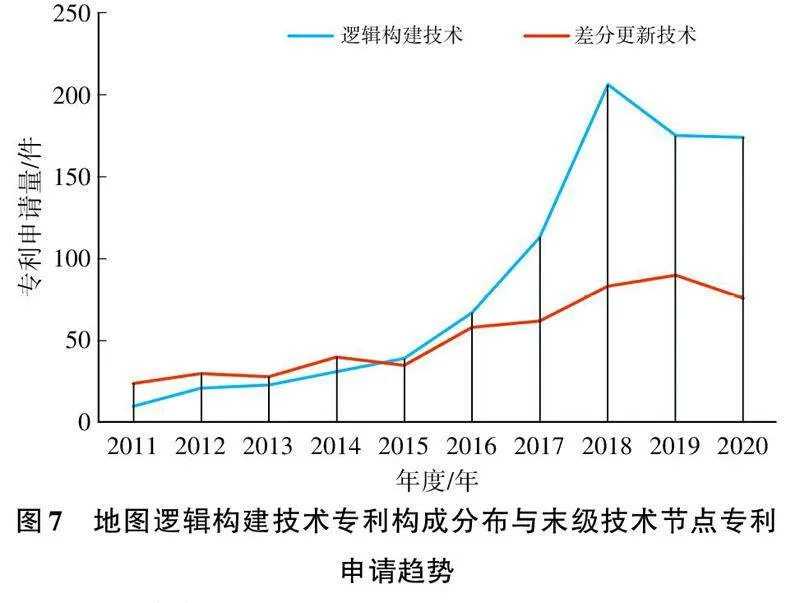
目前,逻辑构建技术发展迅速,发展潜力较大。差分更新技术进展缓慢,还需技术或产业突破带动其进一步发展。
地图逻辑构建技术由逻辑构建技术与差分更新技术构成,其中从专利构成占比分析,逻辑构建技术与差分更新技术专利总量大致相仿,专利申请量分别为924件和902件。但从逻辑构建技术与差分更新技术近十年的专利申请情况分析,逻辑构建技术发展势头明显高于差分技术,近年来发展较为迅猛。差分更新技术专利近十年来的专利申请量明显低于逻辑构建技术,同时专利申请量相对稳定呈现出缓慢上升态势,表明该技术还处于技术发展期,还需要技术或产业突破带动专利技术的快速发展。(注:差分更新在专利文献中体现并不明显,因此在进行差分更新技术数据处理时将地图更新相关技术标引处理为差分更新技术领域专利)
3.4.2 定位技术
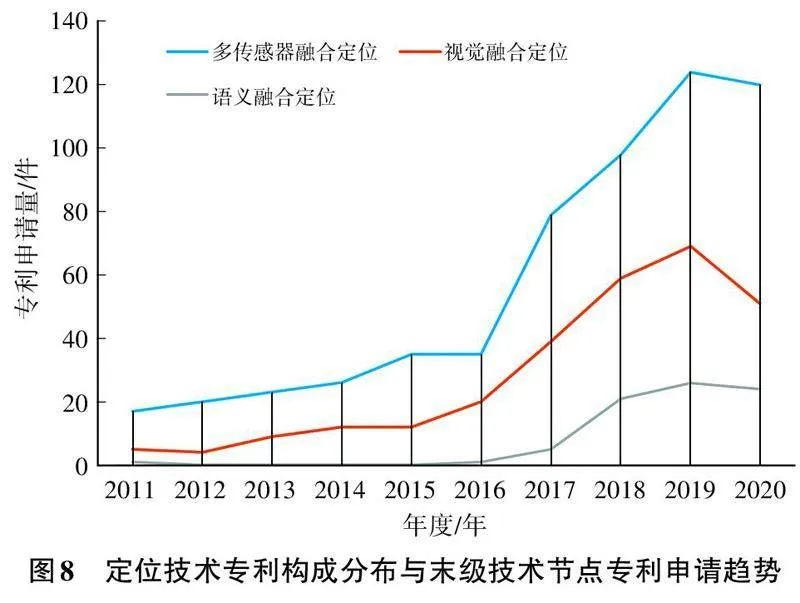
定位技术各技术分支发展趋势与整体趋势保持一致,均保持快速发展势头,发展以多传感器融合定位为主。
定位技术按技术实现方式分为多传感器融合定位、视觉融合定位以及语义融合定位技术,专利申请量分别为618件、287件和79件。其中,多传感器融合技术专利申请量最大的且发展时间较早,视觉融合定位技术起步相对较晚但发展势头较快,语义融合定位技术为新兴技术专利申请处于起步阶段,专利申请量较小,但表现出专利申请量上升趋势。
3.4.3 资料采集处理技术
资料采集处理软硬件技术最主要的专利研发点为多传感器标定技术,除此之外回环检测技术与视觉里程计技术保持较高专利申请态势。
资料采集处理软硬件技术是高精度地图技术的前提与基础,自动驾驶地图数据的获取与高精度定位的实施均需要多传感器联合工作,随着自动驾驶对高精度地图与高精度定位需求的提升,多传感器标定技术发展迅猛,专利申请量快速提升。回环检测技术是较少地图构建误差的重要方法,随着SLAM技术的发展,回环检测技术同样得到发展,具有较快的专利发展趋势。在硬件方案中视觉里程计的专利发展趋势明显高于激光里程计,视觉里程计在成本与应用场景等方面具有较大的优势,可以提取语义信息,但在运算差距、动态性能方面还存在一定的差距,是未来研究的一个主流方向,当前处于较高的研发热度,相关专利申请呈现快速增长趋势。
3.4.4 地图质量保障技术
地图质量保障技术以数据检查技术为主,算法测评技术专利呈现上升趋势。
地图质量保障技术是保障自动驾驶地图数据准确性的重要手段,主要分为数据检查技术与算法测评技术,当前数据检查技术是地图质量保障技术的主流手段,在专利发展趋势方面,数据检查技术专利申请趋势呈现小幅下滑趋势,而算法测评技术专利申请量虽然较小,但近年来专利申请量明显提升。随着自动驾驶地图技术的逐步发展,预计算法测评技术将逐步成熟,未来专利申请量会得到一定的提升。
4 结束语
结合高精度地图技术的技术发展情况与专利分析结果,本文针对高精度地图技术发展提出如下4点建议,以期为相关产业发展提供助力。
(1)整体地图构建技术建议采用集中采集为建图基础,在海量众包数据中快速提炼符合规范的静态图层变更信息和动态图层实况信息的组合式构建方案。
集中制图采集精度高,但更新频率低、采集成本高;众包采集数据鲜度高、成本低,但采集精度低、可靠性和一致性较差。因此以集中采集为建图基础,在海量众包数据中快速提炼符合规范的静态图层变更信息和动态图层实况信息,两者深度结合、优势互补的技术模式成为目前主流的发展方向。
(2)增加基于视觉的自动驾驶地图构建技术研发投入,以应对众包模式地图构。
采用基于激光雷达技术手段进行自动驾驶地图采集的成本较高,对于初创公司意味着极高的投入与成本。众包模式作为自动驾驶地图采集和更新的一种手段,已经受到行业参与者的重视,但基于激光雷达进行众包模式地图在运营方面具有较大的困难,一是激光雷达传感器成本较高,二是众包车辆进行激光雷达设备的加装对于车辆自身改动较大,不利于模式的推广。相比之下采用视觉方案进行众包模式构图在设备成本与推广难易程度方面具有明显的优势,但就技术研发而言众包模式需要较多在基于视觉技术的地图构建技术中的研发,因此建议相关企业加大基于视觉的自动驾驶地图构建技术研发,以更好的应对众包模式地图构建。
(3)开展地图更新技术研究,保障自动驾驶地图实时精确性。
高精地图数据的实时更新是自动驾驶领域关注的重要问题之一,例如道路是否拥堵、是否有交通事故、交通管制情况、天气情况等因素均能对自动驾驶产生重要的影响,未来高精地图会更多的借助大数据和云计算平台,自动化采集体系以及丰富的生态资源进行更新和分发,建立采集、绘制、审核、发布等一体的高精地图自动化采集更新发布流程。
开展地图更新技术专利布局,重点关注低时延、高可靠的数据传输与处理技术。在自动驾驶地图更新领域积极进行地图更新技术的研究具有较大的现实意义,尤其是对于采用众包采集更新模式企业参与者来说,低时延、高可靠的数据传输与处理技术是地图更新技术中的重要的关注领域。
(4)预研地图质量保障技术,重点关注地图数据检查技术,在具有一定的研发基础上关注算法测评技术。
高精地图数据质量验证目前多采用人工完成,自动化处理的数据还不能达到百分百的准确,需要人工进行最后一步的确认和完善。随着人工智能算法的发展及采集数据多源化,依靠数据源多源交叉验证高精地图数据的真实性成为必然趋势,同时,高精地图数据的质量评测体系,包括数据算法测评技术也必将得到长足发展。
参考文献
- 李庆建.自动驾驶地图发展路线探析[J].智能网联汽车, 2020(4): 86-93.
- 自动驾驶地图与定位技术产业发展报告[J].智能网联汽车, 2019(3): 58-67.
- 杨明珠.基于边缘计算的自动驾驶高精地图建图与定位方法[J].自动化博览, 2019(9): 30-33.
- 李鑫慧, 郭蓬, 戎辉, 等.高精度地图技术研究现状及其应用[J].汽车电器, 2019(6):1-3.
- 梁宗正, 童杨. 高精度地图国内外发展现状及对策[J].科技中国, 2021(1): 13-16.
【作者简介】
李健明,硕士,就职于中汽信息科技(天津)有限公司,汽车技术研究。
E-mail:lijianming@catarc.ac.com
猜你喜欢
水运工程(2022年7期)2022-07-29 08:37:38
传感器世界(2019年4期)2019-06-26 09:58:44
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
河南科技(2016年8期)2016-09-03 08:08:22
发明与创新(2016年5期)2016-08-21 13:42:50
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
化学分析计量(2013年1期)2013-03-11 16:37:15
发明与创新(2013年1期)2013-03-11 15:53:28