
基于RobotStudio的机器人饮料装箱流水线设计仿真
2024-12-04 00:00:00范鹏旭董伽豪顾天宇顾云阳庄泽杨
中国新技术新产品 2024年4期
关键词:工业机器人
摘 要:随着机器人技术的发展,机器人化工厂越来越普遍。使用工业机器人代替人工,既能提高生产效率,又可以减少操作不当引起的人身意外。为减少人力资源的浪费,提高社会生产力,本文基于RobotStudio设计了机器人饮料装箱流水线。将Smart组件与3台IRB2600机器人搭配,实现饮料装箱的全过程自动化生产仿真。仿真结果表明基于机器人饮料装箱流水线设计的可行性,为类似项目的自动化生产提供解决方案。
关键词:工业机器人;流水线设计;自动化生产;RobotStudio;Smart组件
中图分类号:TP 242" " " " " " " " " " " " " " " 文献标志码:A
随着工业生产的不断发展,自动化技术的应用越来越广泛,工业自动化生产线不仅提高了工业生产的效率,还减少了人力资源的浪费。其中,搬运装箱机器人能够自动完成货物的包装作业,提高了装箱的效率,减少了人工操作的误差和安全隐患,极大地提高了物流行业的效率和安全性[1]。
RobotStudio是一款较为简单的ABB工业机器人仿真软件,它提供了直观的图形用户界面,方便用户进行机器人建模和编程[2]。在仿真环境中,用户可以根据实际工作场景和需求,进行多次试验和优化,以确定最佳的机器人仿真程序。还可以对机器人进行多次测试和验证,以保证其在实际操作中具有良好的安全性和可靠性[3]。使用RobotStudio进行仿真试验可以避免在实际生产环境中进行测试,从而降低测试成本,缩短测试时间。
基于RobotStudio的机器人饮料装箱流水线设计,为饮料装箱和封装生产线提供了一种高效、可靠、无须人工干预的自动化生产设计方案,也为类似工程提供了可靠的工业设计方案,具有重要的研究意义。
1 工作站设计
1.1 总体方案设计
本文设计的基于机器人的饮料装箱流水线要求工作机器人具有工作空间大、运动灵活以及运行误差小等特性,因此本文选用具有高作业效率、高协调能力、高精准能力和高容错率等特点的IRB2600机器人。
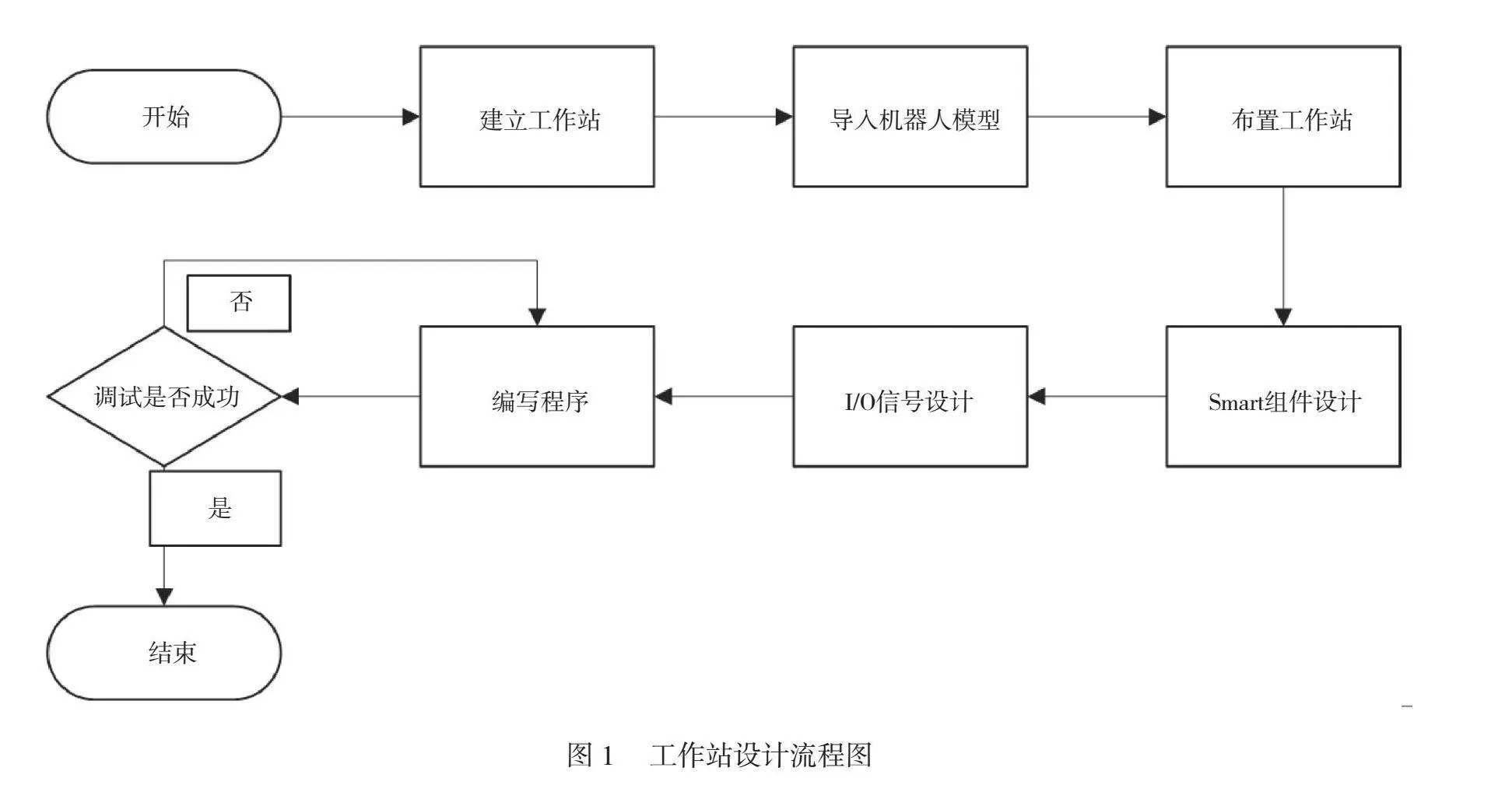
本文设计的饮料装箱—封装—码垛工作系统采用Robot-Stuido软件进行模拟设计并仿真。从RobotStudio模型库中导入传送带和安全围栏等模型;运用建模功能完成码垛盘、搬运物、底盒以及盒盖的建模;利用 Smart 组件使模型不断生成并控制各模型的运动,以达到传送效果;完成I/O信号的连接以及搬运、码垛程序的编写后,进行仿真测试,观察是否需要进行调整。设计流程如图1所示。
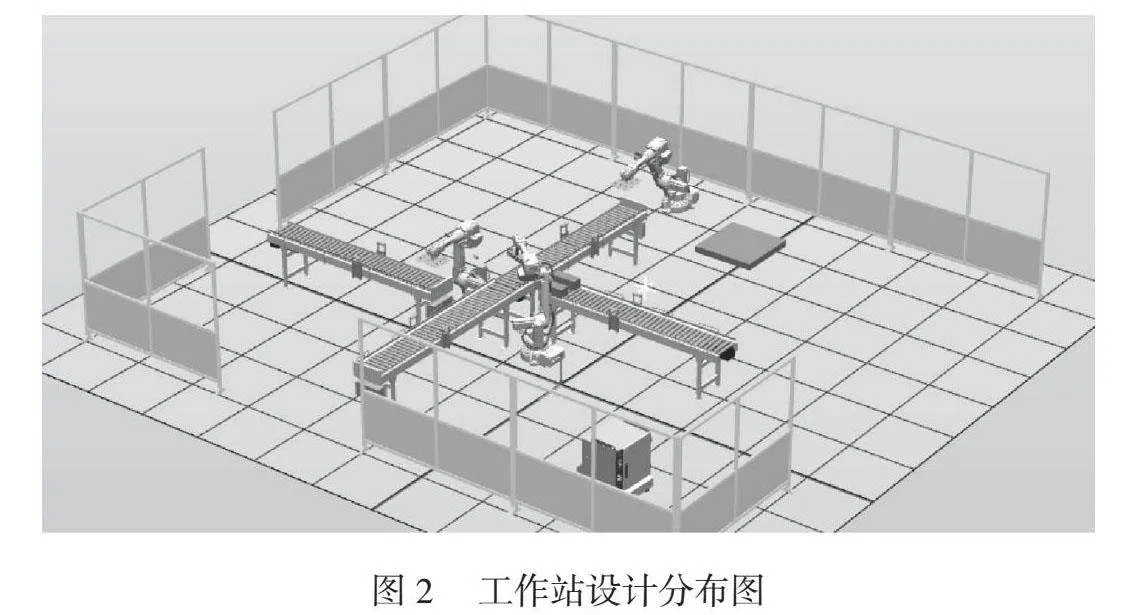
通过RobotStudio创建1个新的工作站,从导入模型库中选取传送带、安全围栏、控制柜导入工作站,布局调整后从“ABB模型库”中选取IRB2600型机器人分别放至对应加工点,调整工作站中各模型的位置,避免出现机械臂工作轨迹重叠并发生碰撞的情况。利用建模功能搭建机器人末端工具,并完成安装。工作站整体布局如图2所示。
1.2 Smart组件设计
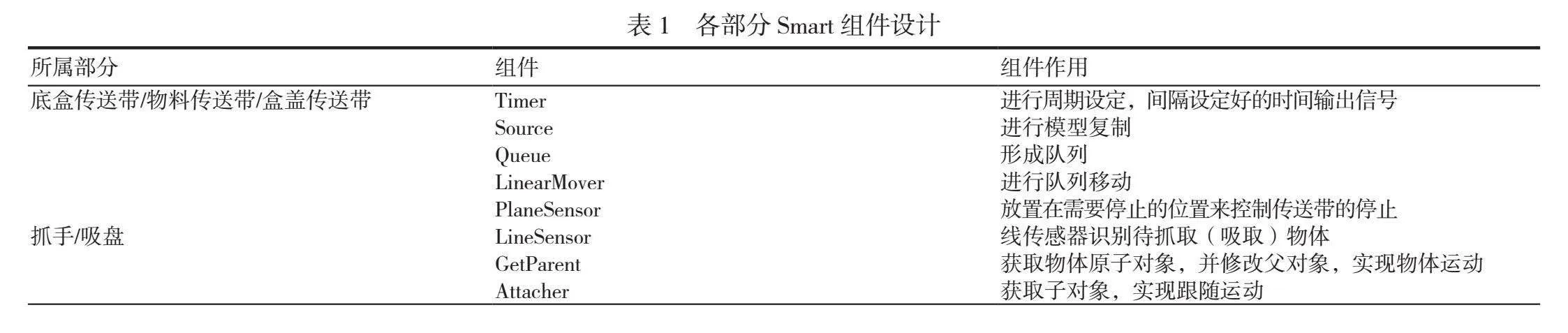
本文涉及的Smart组件包括Timer、Source、Queue、LinearMover、
PlaneSensor、GetParent以及Attacher。
各Smart组件的作用如下。由Timer进行周期设定,间隔设定好的时间输出信号到Source组件进行模型复制,将复制的模型导入Queue组件形成队列,通过LinearMover组件进行队列移动,完成模型的不断运输。在需要停止的位置放置PlaneSensor组件来控制传送带的停止,实现运送到达指定位置即停止运输的效果。运用GetParent组件改变物件的父对象,实现物体的搬运以及模型一体化运动。各部分Smart组件设计见表1。
1.3 各部分通信设计
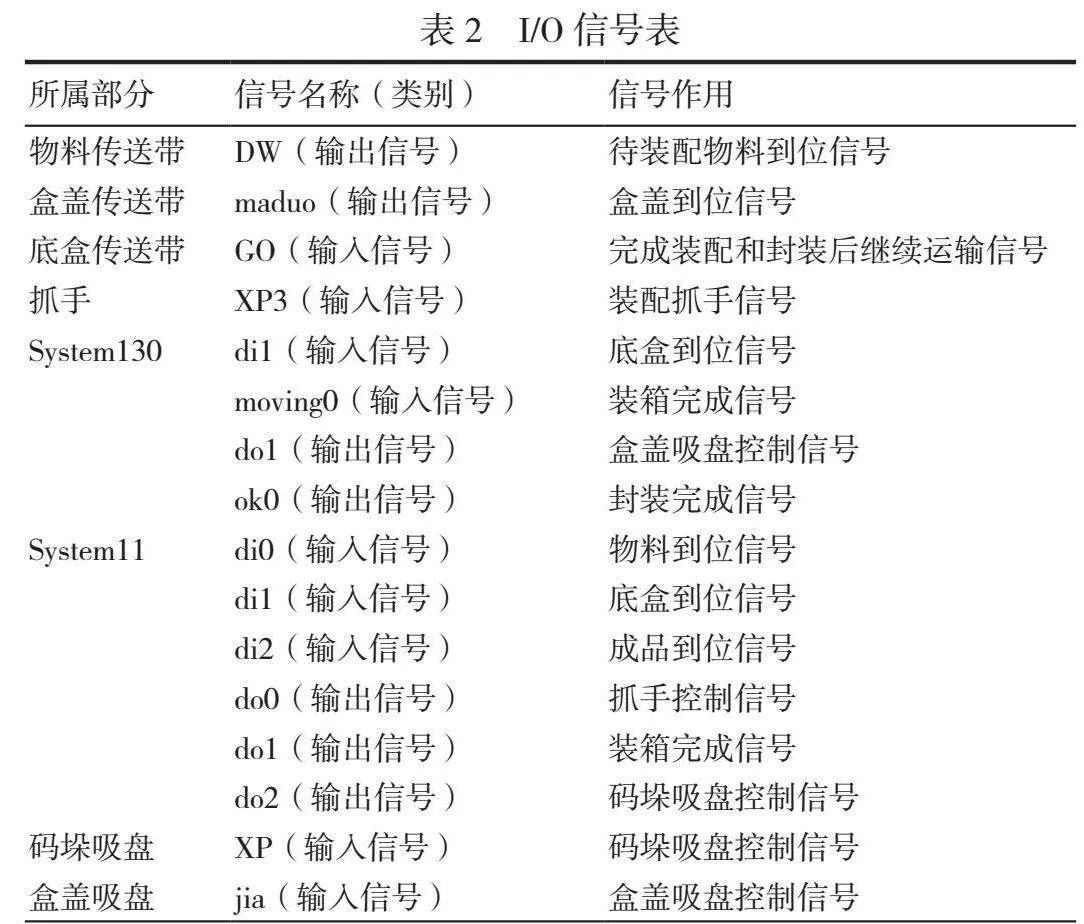
本项目的正常运行基于一定的工作逻辑,需要各部分之间进行信号交流以达到所预设的运行效果。判断物料与底盒是否就位,当两者皆就位时,抓取机器人执行抓取程序。抓取完成后,抓取机器人输出1个装载完成的信号给封装机器人,由封装机器人完成封装工序。封装完成后,封装机器人输出1个完工信号,装箱传送带将成品运送至码垛点,此时码垛机器人进行码垛工序。各部分的I/O信号表见表2。
2 RAPID程序设计
2.1 抓取机器人
本项目设计为1箱9瓶饮料,分布为3行3列。将抓手设置为每次抓取3瓶饮料。只需在标定位置基础上完成2次纵坐标变换即可装满底盒。此处运用FOR循环中的i控制坐标偏移量搭配MoveJ offs(point,x,y,z)完成目标点位变换。
上述代码中,point为目标点;x为x轴偏移量;y为y轴偏移量;z为z轴偏移量。
变换规律程序如下。
FOR i FROM e TO 2 DO
WaitDI die,1;
WaitDI di1,1;
MoveJ offs(Target_10,0,0,200) , v800,z20,ToolFrame1\wobj:=wobj0;
MoveL offs(Target_10,0,0,0),v500,fine,ToolFrame1\wobj:=wobj0;
setdo doe,1;
waitTime 1.1;
MoveL offs(Target_10,0,0,250),v800,z20,ToolFrame1\wobj:=wobjo;
MoveJ offs(Target_20,0,i*100,500) ,v800,z20,ToolFrame1\wobj:=wobj0;
MoveL offs(Target_20,0,i*100,0),v500,fine,ToolFrame1 \wobj:=wobj0;
setdo do0,0;
waitTime 1.1;
MoveL offs(Target_20,0,i*100,350),v800,fine,ToolFrame1 \wobj:=wobj0;
2.2 封装机器人
本项目设计为嵌套式盒装,如果要封装,就需要在搬运轨迹之间进行设点,使机械臂搬运符合运动常理,防止超出运动范围导致项目报错,也防止在运动过程中与底盒发生碰撞导致盒盖掉落。运用MoveJ offs(point,x,y,z)取2个过程点,实现2点搬运。
封装过程取点程序如下。
MoveJ offs(Target_10,0,0,200),v6e0,fine,tool0\wobj : =wobj0;
MoveJ offs(Target_20,0,0,200),v600,fine,tool0\wobj:=wobj0;
2.3 码垛机器人
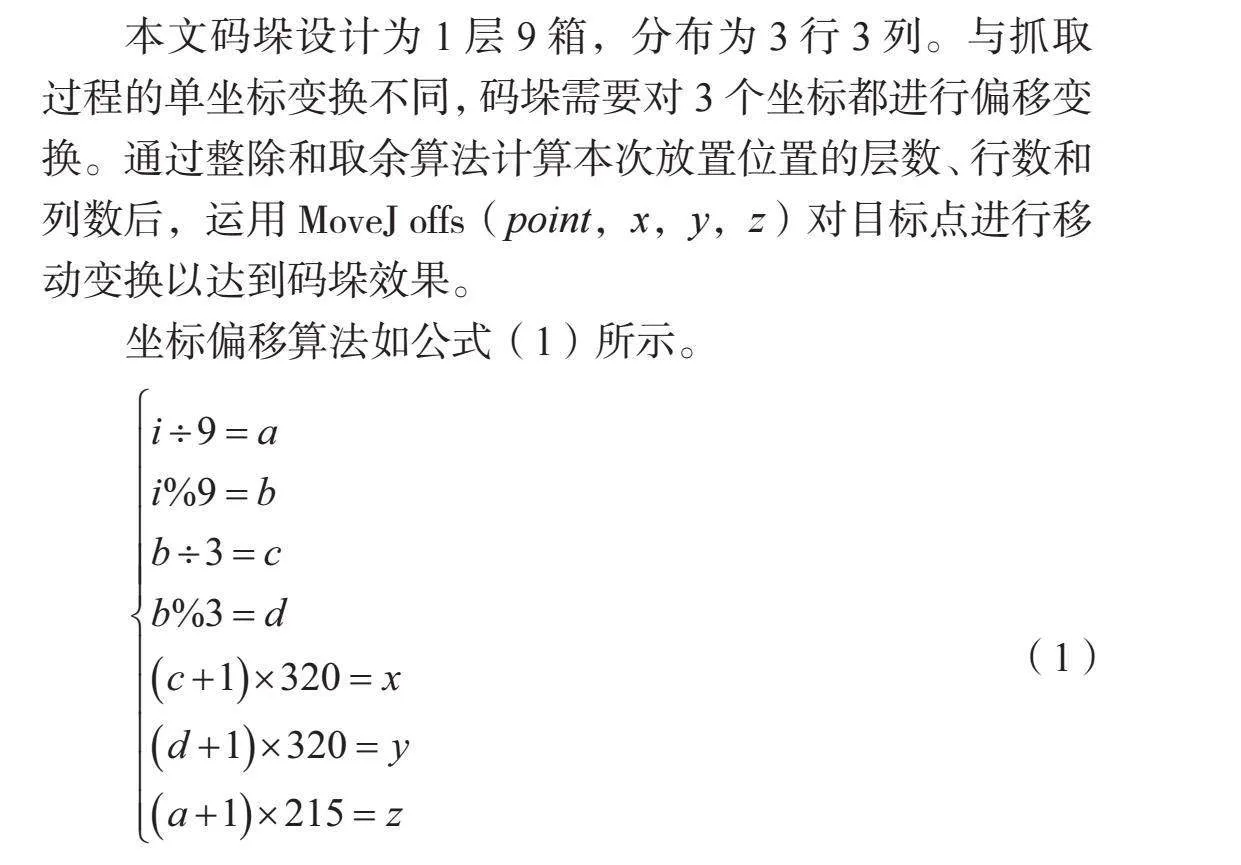
本文码垛设计为1层9箱,分布为3行3列。与抓取过程的单坐标变换不同,码垛需要对3个坐标都进行偏移变换。通过整除和取余算法计算本次放置位置的层数、行数和列数后,运用MoveJ offs(point,x,y,z)对目标点进行移动变换以达到码垛效果。
坐标偏移算法如公式(1)所示。
(1)
式中:i为码垛个数;÷为整除算法;%为取余算法;a为层数;b为本层的码垛个数;c为行数;d为列数;x为目标点x轴偏移量;y为目标点y轴偏移量;z为目标点z轴偏移量。
码垛过程部分程序如下。
MoveJ offs(Target_20,((i mod 9) DIV 3)*(-320),(i mod 3)*(-320),(i div 9)*215+250),v800,z20,MyNewTool\WObj:=wobj0;
MoveL offs(Target_20,((i mod 9) DIV 3)*(-320),(i mod 3)*(-320),(i div 9)*215),v300,fine,MyNewTool\WObj:=wobj0;
setdo do2,0;
WaitTime 1.1;
MoveL offs(Target_20,((i mod 9) DIV 3)*(-320),(i mod 3)*(-320),(i div 9)*215+250),v800,z50,MyNewTool\WObj:=wobj0;
3 仿真
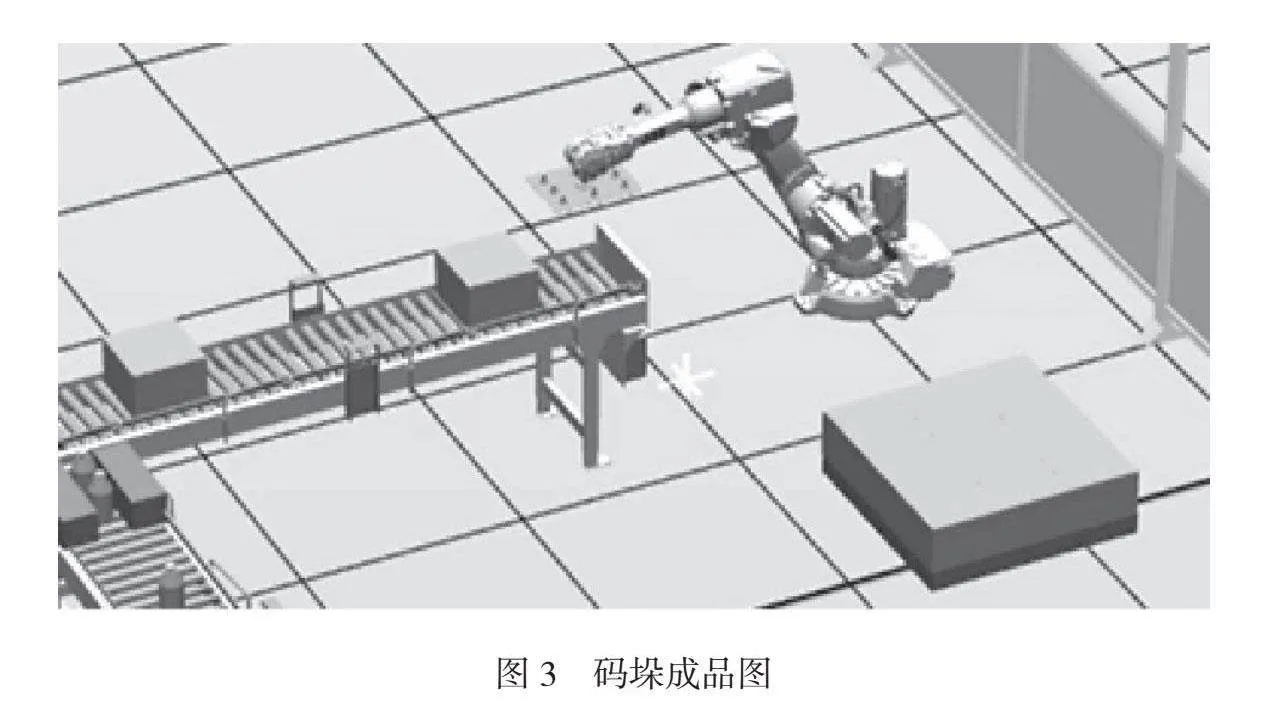
经仿真验证,本项目可以实现由物料传送带、底盒传送带、盒盖传送带末端生成对应部件,当各位置物料到位时,抓取机器人进行装箱,3个1抓,9个1箱。装箱完成后,由封装机器人完成封装。封装完成后,底盒传送带继续运行,各位置物料缺少后在各自传送带末端补充新品,并运输至指定位置,循环装箱和封装操作。成品运输到搬运位置,由码垛机器人取走码垛,完成产品自动封装流程。码垛成品如图3所示。
仿真结果显示,运输过程未发生碰撞,机械臂搬运过程顺畅,各部分工作环节协调良好,符合设计预期效果。
4 结论
搬运机器人涉及力学、机械学、电器液压气压技术、自动控制技术、传感器技术、单片机技术和计算机技术等领域,已成为现代机械制造生产体系中的一项重要组成部分[4]。对长距离运输来说,搬运机器人系统能够有效地进行任意站点运输,很大程度减少了人力资源的浪费,提高了工作效率,同时解决枯燥的机械式搬运工作带来的雇员流失问题,能合理地利用现有占地面积,提升企业形象和车间整洁度,实现无人化生产[5-8]。
本文根据饮料生产的正常工艺步骤设计了装箱—封装—搬运流水线,结合RobotStudio软件对全工作流程进行仿真,创建了物料传送带、盒盖传送带、底盒传送带、吸盘以及抓手等Smart组件,实现了抓取、封装和码垛3个机器人与传送带之间的I/O链接,此外还使用线传感器与面传感器用于各部分之间信号的接收与发出。整个仿真系统经过调试后,3个机器人可以正常工作,达到预期效果,说明了项目的可行性,为类似的项目给出了解决方案。
参考文献
[1]徐一波,鄢敉君.工业机器人的发展现状和前景分析[J].科技创新与生产力,2023(2):97-99.
[2]付秋林,鲁庆东,蒋世应.我国工业机器人发展现状与前景[J].现代制造技术与装备,2020,56(10):217-218.
[3]王一博,何锐波,张尚,等.林间搬运机器人运输方式综述与展望[J].林业机械与木工设备,2023,51(3):11-23.
[4]区娟兰,陈晓康,张权芳,等.基于RobotStudio的码垛机器人工作站仿真设计[J].南方农机,2022,53(20):19-21,28.
[5]周春东,谢杰,王剑春,等.基于RobotStudio的电池托盘焊装产线设计与仿真[J].机械工程与自动化,2022(4):62-64.
[6]庞党锋,崔世钢,刘旭.基于RobotStudio的机器人上下料工作站仿真设计[J].组合机床与自动化加工技术,2021(12):129-131.
[7]夏中坚.工业机器人的虚拟仿真技术在信息化课程教学中的有效应用[J].南方农机,2021,52(10):148-149.
[8]王建兴.工业机器人在智能制造中的应用研究[J].长江信息通信,2023,36(2):141-143.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28 17:55:52
科技创新与应用(2016年34期)2016-12-23 18:52:28
青春岁月(2016年22期)2016-12-23 16:07:08
汽车科技(2016年6期)2016-12-19 20:40:37
科技创新导报(2016年21期)2016-12-17 12:23:00
科技视界(2016年25期)2016-11-25 00:16:40
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技视界(2016年18期)2016-11-03 23:15:51
企业导报(2016年13期)2016-07-19 18:30:45
科技视界(2016年15期)2016-06-30 18:35:47
