
民航GPS恶意干扰检测系统的开发与应用
2024-12-04 00:00:00张彦伟
中国新技术新产品 2024年4期



摘 要:随着空间定位技术不断进步,GPS(Global Positioning System)定位技术民航领域应用越来越广,GPS干扰将直接影响民航飞行安全。为了快速、准确地检测GPS干扰,提升保障能力,本文通过分析定位技术以及GPS干扰的特性,设计了多(单)GPS节点以及移动网络3种环境下的干扰排查算法。利用排查算法采用Android系统的手机作为平台,开发一套可运行于手机的民航GPS恶意干扰检测系统,并在实际应用过程中取得了良好的效果,降低了检测成本。
关键词:GPS;恶意干扰;移动定位;防欺骗
中图分类号:P 258" " " " " 文献标志码:A
根据技术实现方法可以将GPS恶意干扰方式分为压制性干扰以及欺骗性干扰[1]。压制性干扰是通过全(定)向天线配合大功率干扰发射机来实现对某个区域或者特定方向的卫星信号屏蔽,使GPS接收机的工作性能降低或完全丧失;欺骗干扰是利用专业的信号发生设备,产生虚假卫星信号欺骗对方的导航接收机,使其定位功能发生错误。相对压制干扰信号,欺骗信号更具威胁性,更难被察觉,同时存在危害性,甚至可以通过控制欺骗信号来控制他方飞行器[2]。
1 定位技术
定位技术主要是指某个特定坐标系中,通过技术手段、科学运算获得待测具体位置的过程。定位可以通过多种介质实现,例如红外线、超声波和无线电波等,随着移动通信技术的发展,无线电定位技术成为在民用领域应用最广的定位方法。在众多的定位方法(红外线、超声波W及无线电等)中,应用最广泛的是无线电定位[3],以下2种最典型:1)星基无线电定位。依托多卫星数据计算并测定物体位置(例如GPS)的方式。2)陆基无线电定位。在建立地面基站的基础上测量接收电波参数计算获得物体位置的(例如蜂窝网络定位与无线电导航定位)。
1.1 GPS定位技术
目前,GPS定位技术只通过卫星信号就可以完成定位,当捕获4颗卫星信号时就可以完成准确的定位工作,其卫星基站主要由美国控制并对全球免费开放使用。GPS定位主要包括单点定位与相位定位2种方式。其中,相位定位主要采用伪距或测量者相位测量,获得的精度相对较高,主要用于对精度要求比较高的领域,例如工程测量等。单点定位采用TOA(Time of Arrival)位法,主要通过伪距来测定地面接收机与卫星之间的距离。用户以接收机接到卫星信号的时间延时或者信号相位差为参数,计算接收机与卫星之间的相对距离。再根据接收机与卫星设备之间的种差,结合卫星的三维坐标,采用三维坐标系中距离公式列出方程(1)。
(1)
式中:Pn为卫星的伪距;xn、yn、zn为卫星的三维坐标;∆t为接收机与卫星之间的钟差;x、y、z为待测卫星的坐标;c为光速;求解以上方程就可以得到接收机位置信息。
在通常情况下接收机可以锁住4颗及以上的卫星,因此可以将每4颗卫星分为1组,通过计算得到筛选出差最小的一组卫星作为计算因子,以达到进一步提高精度的要求。
1.2 移动网络定位技术
移动网络定位技术主要是依托移动基站来实现对移动终端无线电波位置的定位技术。其位置信息包括但不限于移动终端的坐标、高度以及移动速度等,其定位精度依赖于移动基站的性能,对移动终端性能没有要求。通常用于有移动网络信号覆盖区的定位需求,有定位速度快、定位精度高等优点[4]。
移动网络定位能够弥补GPS定位的缺陷,当某些特殊场景下当无法接到GPS信号时,移动网络定位仍能正常工作。GPS工作频率主要集中在L1波段(1575.42±1.023)MHz、L2波段(1227.60±1.023)MHz、L5波段(1176.45±1.023)MHz 3个频段。移动蜂窝网络工作频率主要集中在800 MHz以及900 MHz频段,与GPS处于不同工作频段降低了同时受扰的可能性[5]。
2 GPS欺骗干扰特性
随着导航技术不断革新,在民航领域GPS定位技术已经广泛深入民用航空的各领域。2023年,由于卫星导航信号的脆弱性导致其易受到恶意干扰,如何识快速、准确、经济地识别欺骗干扰,对保障民航飞行安全有重大的意义。
2.1 转发式欺骗
在实际应用场景中对于军码信号以及其他专用导航信号大多采用转发式欺骗干扰,转发式欺骗干扰也是现阶段被使用最广泛的欺骗方法。转发式欺骗原理如公式(2)所示。
(2)
式中:xn、yn、zn为目标坐标;在系统内将接收的信号传输至发射机,此过程中信号延时为t1;发射机自身延时为t2;发射机至目标基站的延时为t3;xm、ym、zm为接收卫星的坐标;Pn为卫星的伪距;∆t为目标接收机与卫星之间的钟差;c为光速。
2.2 生成式欺骗
生成式欺骗干扰的本质是通过架设欺骗信号发生装置,通过模拟真的位置信息、卫星位置信息,并计算接收卫星信号的码信息以及载波,生成欺骗信号,最终由欺骗天线将伪信号发射出去,达到对欺骗信号发射覆盖范围内的接收机的欺骗目的,如公式(3)所示。
(3)
式中:xn、yn、zn为目标坐标;∆tn为目标接收机与卫星之间的钟差;c为光速;欺骗天线模拟坐标为xα、yα、zα;Pα卫星的伪距;tα偏移量;从而使受欺骗接收机获得错误的位置信息。
2.3 欺骗特征
在某开阔场地随机选取相隔100m内,3个点作为试验点并记录试验点真实的坐标数据。在试验点上分别放置3个接收机,并将欺骗源设置好固定延时,开启欺骗源,记录3个接收机的伪位置信息归纳欺骗结果。
2.3.1 转发式欺骗
在多次调整卫星延时参数后根据试验获得的数据配合MATLAB数据分析工具,对数值计算的结果进行统计并记录分布。当未打开干扰时,可以观察到接收机的定位结果均落在实际位置附近仅存在误差。当打开干扰时(如图1所示),可以观察到当卫星信号的延时一定时,接收机的定位结果均落在干扰源周围,由于钟差误差导致了伪距误差,因此定位结果在原点位置(干扰源位置)成误差分布。由此可以通过数值计算得出以下结论:当卫星信号延时一定时,在欺骗影响区域内,接收机在任何点的定位结果(不考虑伪距误差)均为干扰源接收天线位置。
2.3.2 生成式欺骗
当生成源的延时一定时,从数值计算的统计结果可以发现:当未打开干扰时,接收机的定位结果均落在实际位置附近;当干扰源打开时,接收机的定位结果均落在生成源周围,由于钟差误差导致了伪距误差,因此定位结果在原点位置(生成源位置)成误差分布。可以通过数值计算得出以下结论:当生成源参数一定时,在欺骗影响区域内,接收机在任何点的定位结果(不考虑伪距误差)均为生成源接收天线位置。
从第三章的结果可以看出,无论处于干扰区的任何位置,接收机所得到的定位结果都是一致的,所以只要在干扰区内保持间隔布置1个以上观察点,如果这些观察点的定位结果一致,那么这些观测点的导航数据必然来自欺骗信号。
3 欺骗干扰检测算法模型
通过试验以及数值计算,已经基本掌握了欺骗干扰的特征,需要进一步从技术上消除系统误差以及测量误差,才能确定可靠的欺骗干扰检测方法。在试验过程中发现,接收机的定位结果均落在一个范围内,并不符合理论结果,所以需要得到一个阈值来进一步提高检测的准确性与可靠性。
3.1 多节点的检测算法模型
采用多节点模型的检测方法实现欺骗干扰检测,主要是通过多个接收机在不同位置的同一时刻得到的位置信息来判断接收机所处范围是否存在欺骗干扰的方法。以2个接收机为例,可以将2个接收机至于某个范围内的不同位置,通过可靠的测量手段测定2个接收机的位置,计算2个接收机之间的位置矢量差,确定阈值范围。采用公式(1)计算。
r=P(a)-P(b),R=r+l" " " " (1)
式中:P(a)、P(b)分别为接收机位置;r为接收机位置矢量差;l为平均偏差;R为阈值半径。当定位位置偏出阈值时,可确定为被干扰。
3.2 单节点的检测算法模型
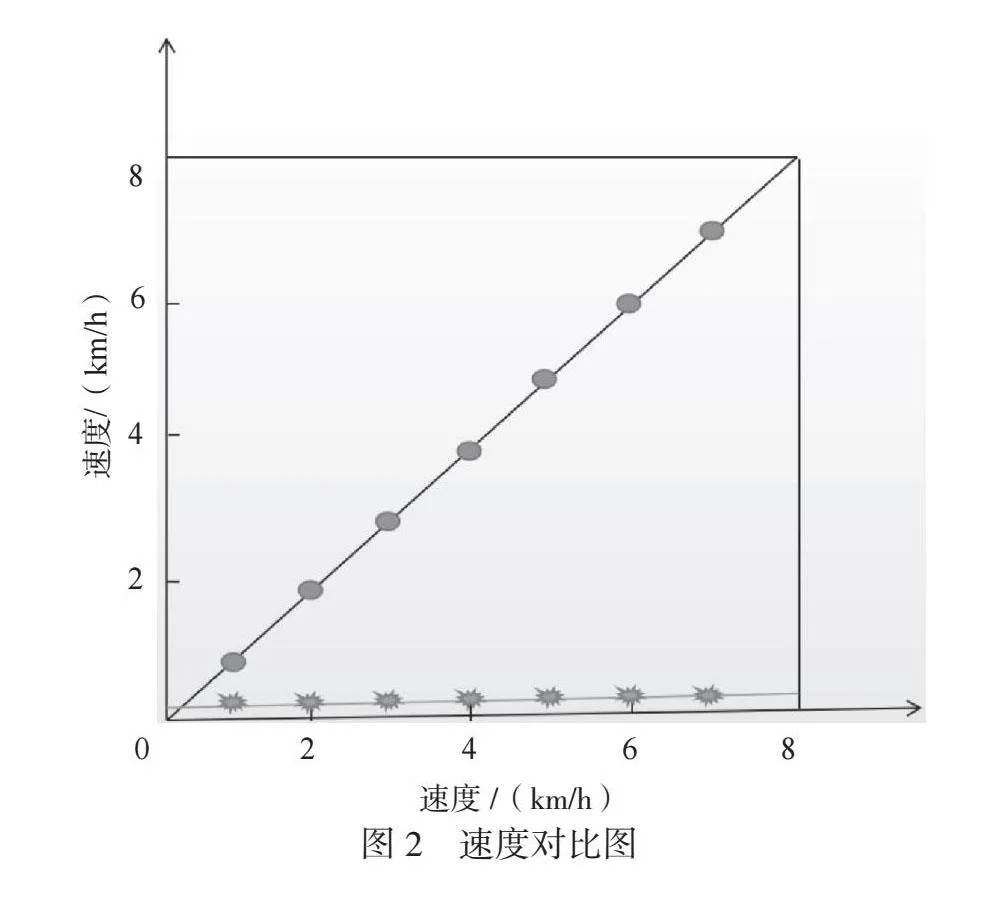
单节点模型检测方法主要是利用多普勒测速原理,在只有单个接收机并且接收机有一定相对运动的情况下检测某一区域内是否存在干扰的方法。现在大多数GPS接收中(例如手机),都可以在接收GPS信号的同时对信号卫星的多普勒频率数据进行处理,并获得接收机的相对速度。在前期试验的基础上,从试验的数据结果、数值计算、落点分布和算法测算等方面分析了多普勒单节点检测欺骗干扰的方法可行性以及准确性。如图2所示,发现在欺骗影响区内且当接收机接收并处理欺骗信号时,不论接收机与欺骗源的相对位置是否发生改变,其接收机在通过多普勒测速时所算得速度矢量,始终与欺骗所计算的速度矢量保持一致。由此可知,当发现接收机速度与当前惯性速度不一致时,即V=Vn(V为初始速度,Vn为移动时速度)时,接收机所处区域为欺骗干扰区域。
3.3 移动网络辅助检测方法
移动网络定位的基本思想就是利用移动端(手机)接收来自3个及以上的基站信号,然后根据其中所包括的与移动终端位置相关的信息获得二者的位置关系,最后根据相关定位算法对移动终端进行定位的方法。在试验过程中发现,在欺骗干扰区域内,使用移动终端(手机)定位能快速、准确地定位到移动终端的具体位置,在去除误差后与接收机的定位结果存在明显差异,所以笔者认为当接收机定位结果与移动终端定位结果满足Pngt;P+γ时(其中,Pn为某时刻GPS测量位置,P为移动网络定位位置,γ为偏差常量),可断定接收机位于欺骗干扰区内。
4 民航GPS恶意干扰检测系统设计
随着移动通信技术的不断发展,GPS定位技术已经广泛应用于手机App中,例如导航、测量和旅游等,采用手机作为民航GPS恶意干扰预警系统(后称预警系统)的硬件平台方便快捷实用。系统采用搭载GPS芯片的Android操作系统手机作为开发硬件平台,来完成多(单)节点以及移动网络辅助的GPS欺骗干扰检测本系统。
4.1 开发环境与关键技术
本系统开发平台选择Eclipse平台,此平台是Android操作系统手机应用开发的被使用的最广泛平台,具有的模块化、易上手以及开放性强的特点。系统开发主要采用Java语言完成编写,JDK 提供了Java运行环境中需要的整个开发工具和基础类库。
4.2 系统功能设计
系统主要包括3个主要功能模块,分别为GPS定位模块、移动网络定位模块以及恶意干扰检测模块,功能说明如下。
4.2.1 GPS定位模块
通过手机自带GPS接收模块获得手机所处位置GPS位置,并显示在手机屏幕上。
4.2.2 移动网络定位模块
通过手机移动信号定位手机所处位置信息,并显示在手机屏幕上。
4.2.3 恶意干扰检测模块
输入1个附近GPS定位数据,通过本机接收的GPS位置以及移动定位位置,进行多点、单点以及移动定位辅助3个方法确定当前位置的干扰情况。
5 结语
随着导航技术发展,民航飞行安全对GPS以及类似卫星导航技术的安全性、可靠性以及稳定性的依赖日益增强。作为民航安全运行的参与者,必须未雨绸缪提前规划,本文提出的单点、多点以及移动定位技术辅助的干扰检测方法,可以在一定程度上实现目前GPS干扰欺骗的预警以及检测功能,方面快捷实用性强,为以后卫星导航技术干扰排查奠定了基础。
参考文献
[1]曾祥华.卫星导航定位接收机频域抗干扰技术研究[D]. 长沙:国防科技大学,2004.
[2]耿正霖,聂俊伟,王飞雪,等.GNSS 抗欺骗干扰技术研究[J].全球定位系统,2013,38(4):65-70.
[3]田孝华,周义建.无线电定位理论与技术[M].北京:国防工业出版社,2011.
[4]Mouly M.GSM数字移动通信基础[M].北京:电子工业出版社,1995.
[5]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
