
OFDM系统迭代脉冲噪声抑制与信道估计方法
2024-11-26 00:00:00谭钢鄢社锋叶子豪杨基睿
系统工程与电子技术 2024年8期










摘 要: 针对脉冲噪声导致正交频分复用(orthogonal frequency division multiplexing, OFDM)水声通信系统误码率性能降低的问题,提出一种迭代脉冲噪声抑制与信道估计方法。首先,利用对称α稳定(symmetric α stable,SαS)分布对水下噪声进行建模,并通过实测噪声数据进行拟合验证。其次,基于脉冲噪声幅值较大的特性,利用切比雪夫不等式对基带接收信号实部和虚部分别进行脉冲噪声检测和抑制。同时,通过分析最小二乘(least squares,LS)信道估计算法估计误差的统计特性,提出自适应门限LS信道估计算法,减轻残余噪声对信道估计的影响。最后,结合估计的信道和译码结果重构噪声并进行脉冲噪声估计,实现迭代脉冲噪声抑制与信道估计。仿真结果表明,在不同程度脉冲噪声和实测噪声场景下,所提方法能够有效抑制脉冲噪声,显著降低OFDM系统误码率。
关键词: 水声通信; 正交频分复用; 脉冲噪声; 信道估计; 迭代估计
中图分类号: TN 929.3
文献标志码: A
DOI:10.12305/j.issn.1001-506X.2024.08.31
Iterative impulsive noise mitigation and channel estimation method
for OFDM system
TAN Gang1,2, YAN Shefeng1,2,*, YE Zihao1,2, YANG Jirui1,2
(1. Key Laboratory of Information Technology for Autonomous Underwater Vehicles, Institute of Acoustics, Chinese
Academy of Sciences, Beijing 100190, China; 2. School of Electronic, Electrical and Communication Engineering,
University of Chinese Academy of Sciences, Beijing 100049, China)
Abstract: Aiming at the problem that impulsive noise deteriorates the bit error rate performance of orthogonal frequency division multiplexing (OFDM) underwater acoustic communication system, an iterative impulsive noise mitigation and channel estimation method is proposed. Firstly, the symmetric alpha stable (SαS) distribution is introduced to model underwater noise and validated by fitting the measured noise data. Secondly, based on the large amplitude property of the impulsive noise, impulsive noise detection and mitigation are respectively performed on the real and imaginary parts of the received baseband signal by Chebyshev inequality. And through analyzing the statistical characteristics of estimation error of the least squares (LS) channel estimation algorithm, an adaptive threshold LS channel estimation algorithm is proposed to reduce the impact of residual noise. Finally, combining the estimated channel and decoding results to reconstruct noise and estimate impulsive noise, the impulsive noise mitigation and channel estimation are iteratively performed. Simulation results demonstrate that under different levels of impulsive noise and measured noise, the proposed method can effectively suppress impulsive noise and significantly reduce the bit error rate of OFDM system.
Keywords: underwater acoustic communication; orthogonal frequency division multiplexing (OFDM); impulsive noise; channel estimation; iterative estimation
0 引 言
水声通信是水下无线信息传输的主要方式,随着水下无线传感网络的建设,水下各平台间高速信息传输需求增加。然而,水声信道具有带宽有限、多径效应明显和衰落严重的特性,是目前最为复杂的无线信道之一[1]。正交频分复用(orthogonal frequency division multiplexing, OFDM)技术由于具有频谱效率高、抗多径、频率选择性衰落等优点,近年来被广泛运用于高速水声通信[2]。传统的OFDM接收机是基于高斯白噪声背景设计的,然而在实际水下环境中,时常存在脉宽短、强度大、随机出现的脉冲噪声,例如冰破碎声[3]、生物噪声[4]、航船噪声[5]等。在接收机解调时,脉冲能量会扩散到所有子载波,影响符号的判决,严重降低了OFDM系统的可靠性和稳定性。因此,在水声通信中,有效抑制脉冲噪声具有重要意义。
传统的脉冲噪声抑制方法主要包括限幅法、消隐法及其组合方法[6-7],其原理是根据脉冲干扰幅值较大的特性,通过设置门限来检测接收信号的脉冲成分并进行限幅或消隐处理,但该方法存在门限设置的难题。文献[6]从理论上分析这类算法的性能,并指出最优门限没有简单的封闭形式解,需要通过数值仿真获得。文献[8]通过拟合实测噪声得到模型参数,并利用数值仿真确定门限,但该方法依赖于实测噪声的统计分布。另一类脉冲噪声抑制方法是根据其时域的稀疏性,利用压缩感知(compressed sensing, CS)技术对脉冲噪声进行估计并抑制[8-11]。文献[8]提出基于最小二乘(least squares, LS)的脉冲噪声抑制算法,并设计一种迭代接收机抑制脉冲噪声,但其计算复杂度较大。文献[9]利用空子载波构建CS模型估计脉冲噪声,但估计性能严重依赖于空子载波数量。文献[10]提出载波频率偏移和脉冲干扰分步或联合估计算法,但需要确定脉冲干扰的稀疏度,并且联合估计的复杂度较大。文献[11]采用广义近似消息传递-稀疏贝叶斯学习算法估计脉冲噪声,降低稀疏贝叶斯学习算法的复杂度,但其性能也高度依赖于空子载波数量,而空子载波数量受限于水声信道的可利用带宽。
脉冲噪声抑制后,将接收信号送入传统的OFDM接收机处理,一般还需要进行信道估计。LS信道估计算法由于不需要信道统计特性且复杂度低,在OFDM系统中广泛运用[12]。然而,残余噪声会降低LS信道估计算法的精度。文献[13]将LS算法估计的信道频率响应变换为时域信道冲激响应,通过截取有效长度的冲激响应值来减轻噪声的影响,但该方法需要预知信道有效长度。研究表明,水声信道具有稀疏性,信道冲激响应仅有少数抽头非零,利用信道稀疏性能够提升信道估计性能[2]。文献[14]提出基于门限的稀疏信道估计方法,将LS算法估计的信道频率响应转换到时域并与门限进行比较,以判断信道抽头是否归零,但该门限是通过最小化各抽头的均方误差推导的,过程较为复杂,且依赖于信道稀疏度。文献[15]提出基于离散傅里叶变换的自适应信道估计算法,通过变换域聚类和判别分析,自适应地去除时域信道冲激响应中的噪声,但该方法需要导频数大于循环前缀长度。文献[16]基于噪声特性提出统一门限,然后利用结构LS算法估计信道,但其噪声功率估计过程较为复杂且信道估计需要迭代进行。
针对以上问题,本文提出一种迭代脉冲噪声抑制与信道估计算法。该算法首先基于切比雪夫不等式检测数据异常值的原理[17-18],利用脉冲噪声幅值较大的特性,设置自适应门限,对基带接收信号实部和虚部分别进行脉冲噪声检测,并利用自适应窗口中值滤波算法对脉冲干扰数据进行处理[19-20]。其次,针对残余噪声对LS信道估计算法性能的影响,基于信道估计误差的统计特性,提出了自适应门限LS(adaptive threshold LS, ATLS)信道估计算法。最后,根据估计的信道和均衡译码结果,迭代地进行脉冲噪声抑制和信道估计。为验证所提算法的性能,在生成的不同程度脉冲噪声和采集的实测噪声场景下进行仿真,结果表明本文提出的算法能够有效抑制脉冲噪声,显著提高OFDM系统的误码率(bit error rate, BER)性能。
1 系统模型
1.1 通带模型
本文采用基于循环前缀的OFDM系统,设系统带宽为B,子载波个数为K,则子载波间隔为Δf=B/K。第k个子载波的频率为fk=fc+kΔf,k=-K/2,-K/2+1,…,K/2-1,fc为载波频率。一个OFDM符号的持续时间为T=1/Δf,循环前缀长度为Tc,因此整个OFDM符号的长度为Tbl=T+Tc。将K个子载波划分为数据子载波、导频子载波和空子载波,其中导频子载波均匀分布,用于信道估计,空子载波用于噪声能量估计。设第k个子载波发送的符号为s[k],则一个OFDM符号对应的通带传输信号为
式中:t∈[-Tc,T];Re{·}表示取信号的实部。
水声信道通常建模为时变信道,本文与文献[8,21]一致,采用具有共同多普勒扩展的时变信道冲激响应模型:
h(t,τ)=∑Ni=1Aiδ(τ-(τi-at))(2)
式中:τ为路径时延;N为水声信道的多径数量;δ(·)为狄拉克函数;Ai,τi,a分别表示各路径的幅度、时延和共同多普勒因子。
经过水声信道后,通带接收信号可表示为
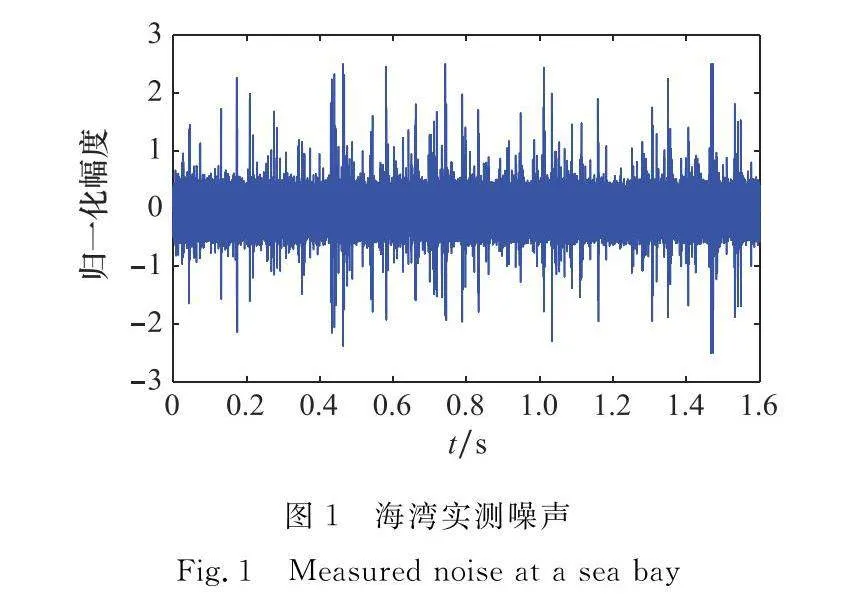
式中:y~(t)和v~(t)均为实信号;v~(t)表示水声信道中的加性噪声,包括高斯背景噪声和脉冲噪声。图1所示为一海湾实测噪声数据,从图1中可以看出明显的脉冲成分。
1.2 噪声模型
当加性噪声存在明显的脉冲成分时,其分布模型将偏离高斯分布,建模为高斯分布将产生较大的误差[22],而高斯混合(Gaussian mixture, GM)模型[23]和对称α稳定(symmetric α stable, SαS)分布[11]等具有重尾特性的分布能够更准确地描述其统计特征。
GM模型的概率密度函数(probability density function, PDF)为
fGM(x)=∑Mm=1pmN(x;0,σ2m)(4)
式中:N(x;0,σ2m)表示均值为0,方差为σ2m的高斯PDF;pm表示第m个高斯成分的混合比率。在实际中,为方便参数估计与描述,通常建模为M=2的二元高斯混合分布[22]。
SαS分布除α=1和α=2外,其PDF没有封闭的解析表达式,一般用特征函数描述:
SαS(r)=e-δα|r|α(5)
式中:α∈(0,2]表示特征指数,决定分布的尾重,α值越小,尾重越大,脉冲特性越明显。当α=2时,退化为高斯分布,参数为N(0,2δ2),δ∈(0,+∞)为尺度参数,表示分布的扩散程度,类似高斯分布的方差。其中,δ=1的SαS分布被称为标准SαS分布。
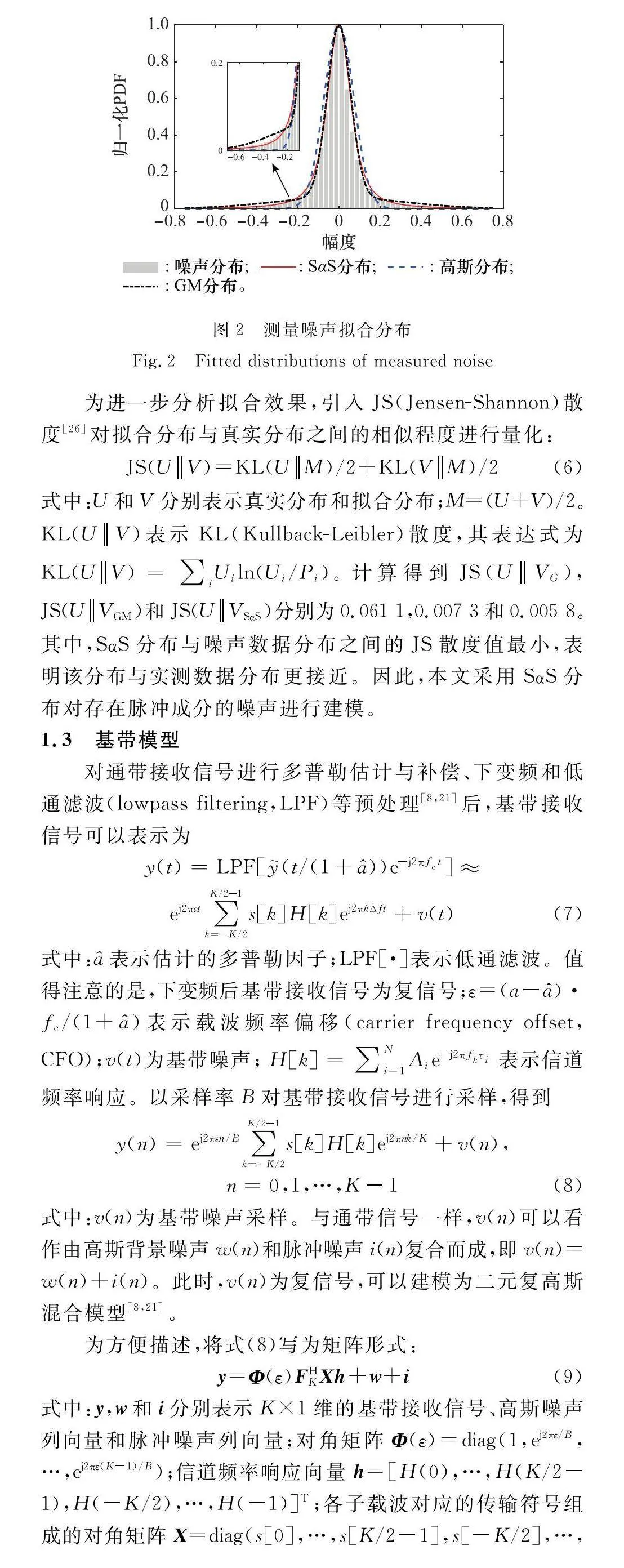
采用高斯分布、二元GM模型、SαS分布对图1中的实测噪声数据进行拟合,其归一化PDF如图2所示。其中,GM模型和SαS分布参数分别采用期望最大化(expectation maximization, EM)算法[24]和分数低阶矩(fractional lower order moment, FLOM)[25]估计。估计的二元GM模型参数为p1=0.739 1,σ1=0.057 4,p2=0.260 9和σ2=0.315 7,表明在采集的噪声数据中,脉冲成分的比重较大,约为26%。估计的SαS分布参数为α=1.291 0和δ=0.052 4,较小的α也表明数据中具有非常明显的脉冲成分。从图2可以看出,与高斯分布相比,二元GM模型和SαS分布都能够描述脉冲噪声的重尾特性,而后者拟合效果更好。
为进一步分析拟合效果,引入JS(Jensen-Shannon)散度[26]对拟合分布与真实分布之间的相似程度进行量化:
JS(UV)=KL(UM)/2+KL(VM)/2(6)
式中:U和V分别表示真实分布和拟合分布;M=(U+V)/2。KL(UV)表示KL(Kullback-Leibler)散度,其表达式为KL(UV)=∑iUiln(Ui/Pi)。计算得到JS(UVG),JS(UVGM)和JS(UVSαS)分别为0.061 1,0.007 3和0.005 8。其中,SαS分布与噪声数据分布之间的JS散度值最小,表明该分布与实测数据分布更接近。因此,本文采用SαS分布对存在脉冲成分的噪声进行建模。
1.3 基带模型
对通带接收信号进行多普勒估计与补偿、下变频和低通滤波(lowpass filtering,LPF)等预处理[8,21]后,基带接收信号可以表示为
式中:a^表示估计的多普勒因子;LPF[·]表示低通滤波。值得注意的是,下变频后基带接收信号为复信号;ε=(a-a^)·fc/(1+a^)表示载波频率偏移(carrier frequency offset, CFO);v(t)为基带噪声;H[k]=∑Ni=1Aie-j2πfkτi表示信道频率响应。以采样率B对基带接收信号进行采样,得到
式中:v(n)为基带噪声采样。与通带信号一样,v(n)可以看作由高斯背景噪声w(n)和脉冲噪声i(n)复合而成,即v(n)=w(n)+i(n)。此时,v(n)为复信号,可以建模为二元复高斯混合模型[8,21]。
为方便描述,将式(8)写为矩阵形式:
y=Φ(ε)FHKXh+w+i(9)
式中:y,w和i分别表示K×1维的基带接收信号、高斯噪声列向量和脉冲噪声列向量;对角矩阵Φ(ε)=diag(1,ej2πε/B,…,ej2πε(K-1)/B);信道频率响应向量h=[H(0),…,H(K/2-1),H(-K/2),…,H(-1)]T;各子载波对应的传输符号组成的对角矩阵X=diag(s[0],…,s[K/2-1],s[-K/2],…,s[-1]);FK表示K×K的傅里叶变换矩阵,其中元素为FK(n,k)=1/Ke-j2π(n-1)(k-1)/K,n,k=1,2,…,K。
2 脉冲噪声抑制与信道估计
本节以式(9)基带信号模型为基础,首先介绍基于切比雪夫不等式的脉冲噪声抑制算法,然后提出ATLS信道估计算法,裁剪由残余噪声导致的信道冲激响应值,最后结合估计的信道和均衡译码结果提出迭代脉冲噪声抑制与信道估计算法。
2.1 脉冲噪声抑制算法
传统的脉冲噪声抑制方法存在门限选择难的特点,一般需要通过数值仿真得到门限。文献[13]表明,在高斯噪声背景下,当子载波数较大时,OFDM信号经过多径信道后可以看作复高斯分布。结合式(9),当存在脉冲噪声时,接收信号可以看作复高斯分布上叠加的脉冲干扰,因此大部分信号位于均值附近,而少部分被脉冲干扰的幅值远远偏离均值。切比雪夫不等式描述了分布未知的随机变量偏离均值一定范围内概率的下界,并被用于检测数据中的异常值[17-18],因此本文利用切比雪夫不等式检测脉冲噪声。
随机变量Y的均值为μ,方差为σ2,则切比雪夫不等式表示为P{|Y-μ|lt;η}≥1-σ2/η2,其中η为任意正数。事实上,该不等式给出了随机变量位于(μ-η,μ+η)范围内概率的下界。取η=kσ,得到
P{|Y-μ|lt;kσ}≥1-1/k2(10)
当k=3,P{|Y-μ|lt;3σ}≥8/9,表明变量位于(μ-3σ,μ+3σ)的概率至少为8/9。因此,给定k后,位于对应范围外的少部分数据可以看作检测的脉冲噪声。结合文献[18,20],本文两次使用切比雪夫不等式对基带接收信号y的实部yR和虚部yI分别进行脉冲噪声检测。两次检测设置的不等式参数分别为k1和k2,且k1lt;k2。第一次使用不等式的目的是尽量去除脉冲干扰的影响,得到非脉冲信号的均值和方差,第二次使用不等式可以修正第一次误判的非脉冲信号。
以yR为例,首先计算yR的均值μ^1和方差σ^21,保留|yR(n)-μ^1|lt;k1σ^1的信号值,得到大部分未被脉冲干扰的信号y′R;然后,计算y′R的均值μ^2和方差σ^22,判断是否有|y′R(n)-μ^2|≥k2σ^2,重新进行脉冲噪声检测。将两次使用不等式检测出的脉冲噪声索引集记为JR。对yI进行相同处理,将检测出的脉冲噪声索引集记为JI,将JR与JI合并得到总的脉冲噪声索引集Jim=JR∪JI。然后,通过自适应窗口中值滤波算法[19-20]对实部和虚部脉冲干扰数据分别进行处理,得到y⌒R和y⌒I。脉冲噪声抑制后的信号可以表示为y⌒=y⌒R+jy⌒I,其中j=-1表示虚数单位。
通过上述过程抑制较强的脉冲噪声后,还存在幅值较小的残余脉冲噪声ire。由于信号y⌒的实部和虚部均位于某个邻域内,噪声w和ire对系统的影响可以近似等效为均值为零的复高斯噪声w⌒,则脉冲噪声抑制后的信号可以表示为
y⌒=Φ(ε)FHKXh+w⌒(11)
2.2 自适应门限LS信道估计算法
脉冲噪声抑制步骤消除了较强的脉冲,减少了信号解调过程中扩散到各子载波的脉冲能量,使CFO估计[10]更加准确。对载波频偏补偿后的接收信号进行傅里叶变换,得到
Y=Xh+W=XFKht+W(12)
式中:ht=FHKh为信道冲激响应;W为频域噪声。具体地,ht=[ht(1),ht(2),…,ht(L),0,…,0]T,其中L表示信道冲激响应长度。设P个导频子载波的索引集为{pi},i=1,2,…,P,构造P×K的选择矩阵P,其中元素为P(i,pi)=1,其他位置为0。则导频子载波上的接收数据为
YP=XPFP×Kht+WP(13)
式中:XP=PXPH为导频符号子矩阵;FP×K=PFK为傅里叶变换矩阵的子矩阵;WP为复高斯向量的子向量,也服从复高斯分布。
通过LS算法估计导频上的信道频率响应,得到h^P=X-1PYP。由于导频子载波均匀分布,等效于在信道频率响应上均匀采样,当Pgt;L时能够通过逆傅里叶变换恢复信道冲激响应
h^tP=FHPh^P=FHPFP×Kht+FHPX-1PWp(14)
式中:FP表示P×P的傅里叶变换矩阵。在均匀导频分布下,记M=K/P。当pi=(i-1)M+1时,有FP×K(i,k)=FK(pi,k)=(1/M)FP(i,k mod P)。因此,实际上FP×K是并列放置的M个FP矩阵,即FP×K=(1/M)[FP,…,FP],将其代入式(14),得到
h^tP=1/M[IP,…,IP]ht+FHPX-1PWP(15)
当Pgt;L时,ht的非零元素只存在于前P个元素,取ht的前P个元素作为真实信道并记为htP,等价于htP=[IP,…,IP]ht。则估计信道h^tP与真实信道htP的关系为h^tP=(1/M)htP+FHPX-1PWP,尺度变换后得到h-tP=htP+hte,hte=MFHPX-1PWP为由噪声引入的信道估计误差。由于水声信道具有稀疏性,仅有少数抽头非零,设对应的位置集合为Q,则有
h-tP(i)=htP(i)+hte(i), i∈Q
hte(i), iQ, i=1,2,…,P(16)
式(16)表明,非零抽头位置的信道冲激响应估计值等于真实信道值加上由噪声引入的估计误差,而其他位置的估计结果则仅是估计误差。下面研究估计误差hte的统计特性。当选择相移键控星座图映射信息比特时,XP可以看作酉矩阵。由于FP也是酉矩阵,因此hte仍是复高斯向量,其均值为零,方差为
Var(hte)=(MFHPX-1PWP)H(MFHPX-1PWP)/P=
MWHP(X-1P)HX-1PWP/P=Mσ2w/σ2s(17)
式中:σ2w和σ2s分别表示噪声功率和导频符号功率。当选择相移键控星座图时,σ2s=1,噪声功率σ2w可以通过空子载波计算。
文献[27]分析了水声OFDM系统中正交匹配追踪(orthogonal matching pursuit, OMP)信道估计算法的估计误差,并根据其统计特性导出OMP算法的停止条件,提高了低信噪比(signal to noise ratio, SNR)条件下的信道估计精度。本文中hte的每个元素服从均值为0,方差为Mσ2w/σ2s的复高斯分布,则|hte(l)|服从瑞利分布,记为Z,且σ2z=Mσ2w/σ2s。Z的累积分布函数为FZ(T)=P{z≤T}=1-e-T2/σ2z。当FZ(T)=0.95时,T=1.73σz,表明随机变量位于[0,173σz]的概率为0.95,即绝大部分由噪声导致的信道冲激响应值的模将位于该范围内。因此,可以通过设置门限Tth=173σz对估计的信道冲激响应进行裁剪。
tP(i)=h-tP(i), |h-tP(i)|gt;Tth
0, 其他, i=1,2,…,P(18)
可以看出,门限Tth与导频子载波SNR (σ2s/σ2w)的倒数成正比。当SNR较大时,h-tP估计结果准确,Tth较小;SNR较小时,h-tP受噪声影响严重,Tth变大。因此该门限可以根据噪声功率的大小自适应地调整。同时,与文献[27]一致,高SNR时Tth接近于零,通过该门限裁剪由噪声引入的信道冲激响应值的性能下降,因此本文进一步将低于信道冲激响应最大模值0.1倍以下的抽头看作噪声[28]。最后,将得到的信道冲激响应通过傅里叶变换转换为频率响应,用于后续的信道均衡。
2.3 迭代算法
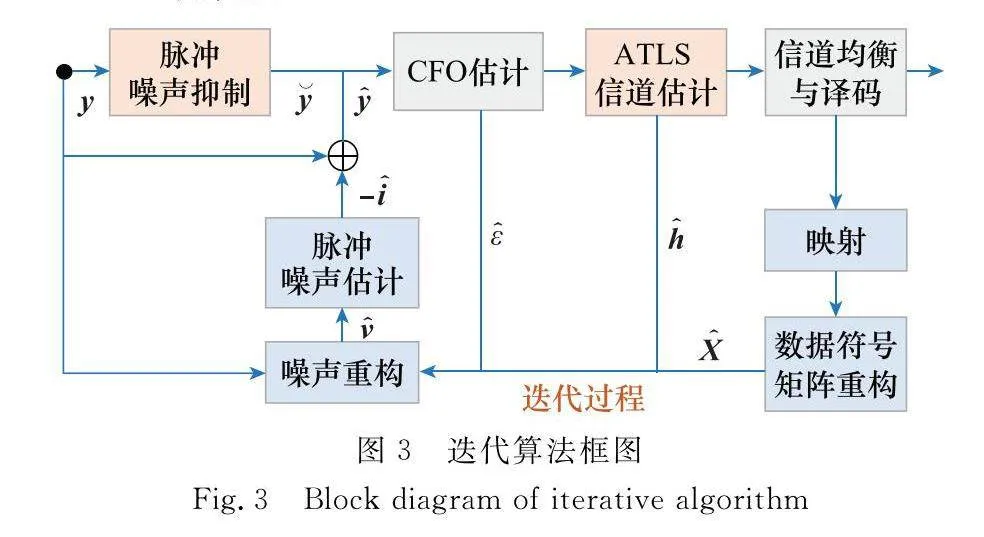
第2.1节提出的脉冲噪声抑制算法可以消除较强的脉冲干扰,有利于载波频偏和信道估计。然而,由于OFDM信号具有较大的峰值平均功率比,直接对接收信号进行脉冲噪声检测,可能消除幅值较大的真实信号,导致系统性能下降。常用的解决方案是迭代上述过程,形成迭代接收机[8,13]。本文提出的迭代接收机如图3所示,首先结合估计的信道响应与均衡译码结果重构OFDM信号,然后由接收信号减去得到噪声,接着进一步估计脉冲噪声。图3中,信道均衡采用最小均方误差(minimum mean square error, MMSE)均衡器。
具体地,第k次迭代开始前,将第k-1次迭代的译码结果映射为符号,插入到数据子载波位置,并在导频位置插入导频符号,构造传输符号矩阵X^(k-1)。结合估计的载波频偏ε^(k-1)和信道频率响应h^(k-1),重构出噪声:
v^(k)=y-Φ(ε^(k-1))FHKX^(k-1)h^(k-1)(19)
同第2.1节脉冲噪声检测过程,两次使用切比雪夫不等式分别检测重构噪声v^(k)的实部和虚部,得到脉冲干扰索引集J(k)im,取出v^(k)中对应的数据,该数据即为脉冲噪声估计i^(k)。因此,去除脉冲噪声后的接收信号可以表示为y^(k)=y-i^(k),然后进行载波频偏和信道估计。
3 仿真结果及分析
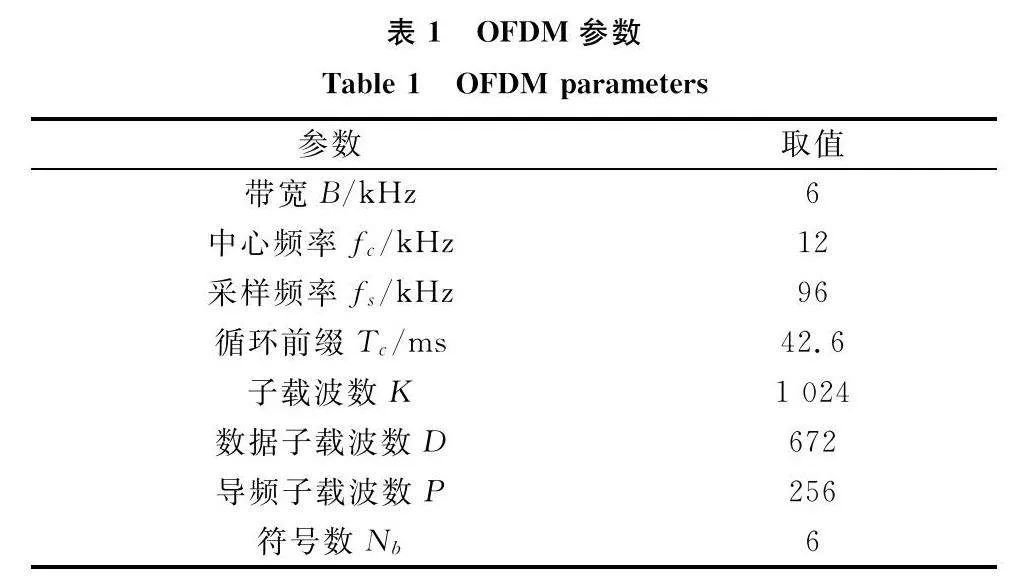
本节通过生成服从SαS分布的不同程度脉冲噪声[29]和实测噪声,对提出的迭代脉冲噪声抑制和信道估计算法进行仿真分析,并与基于LS的脉冲噪声抑制算法[8]和基于CS的脉冲噪声抑制算法[10]进行比较。OFDM参数如表1所示,其中导频子载波均匀分布,带宽两边分别放置24个空子载波,其他48个空子载波和数据子载波混合。水声信道包括8条多径,路径间隔服从均值为1 ms的指数分布,幅度服从瑞利分布,平均功率随时延呈指数衰减,各路径具有相同的多普勒因子[30]。信道编码采用1/2码率的低密度奇偶校验码(low density parity check code, LDPC),比特映射符号采用正交相移键控(quadrature phase shift keying, QPSK)星座图。
根据SαS分布特性,α越小,分布的脉冲特性越明显,幅值也越大;α越大,越接近高斯分布。文献[5]表明,大部分海洋环境噪声特征指数位于1.2~2.0,因此本文选择α=1.4,α=1.6和α=1.8的标准SαS分布分别代表强脉冲、中等脉冲和弱脉冲噪声环境。由于αlt;2时SαS分布的二阶矩不存在,高斯噪声背景下定义的SNR不再适用,因此引入几何SNR[11]如下
SNR=10lg(Ps/(2δ2C2/α-1))(20)
式中:Ps表示信号功率;α和δ分别表示特征指数和尺度参数;C≈1.78为常数。当α=2时,几何SNR退化为高斯噪声背景下的SNR。
3.1 算法性能
首先验证不同程度脉冲噪声环境下提出的脉冲噪声抑制算法和ATLS信道估计算法的性能,其中脉冲噪声抑制算法两次使用切比雪夫不等式的参数为k1=3和k2=5。当k1=3时,变量位于(μ^1-ε1,μ^1+ε1)的概率的下界约为089,因此可以保留大部分没有被脉冲干扰的数据。k2=5表明变量位于(μ^2-ε2,μ^2+ε2)的概率的下界为096,因此可以检测出少部分脉冲干扰。同时,去除脉冲干扰后的接收信号近似服从高斯分布,位于(μ^2-ε2,μ^2+ε2)的概率约为1,有利于保留未被脉冲干扰的信号。
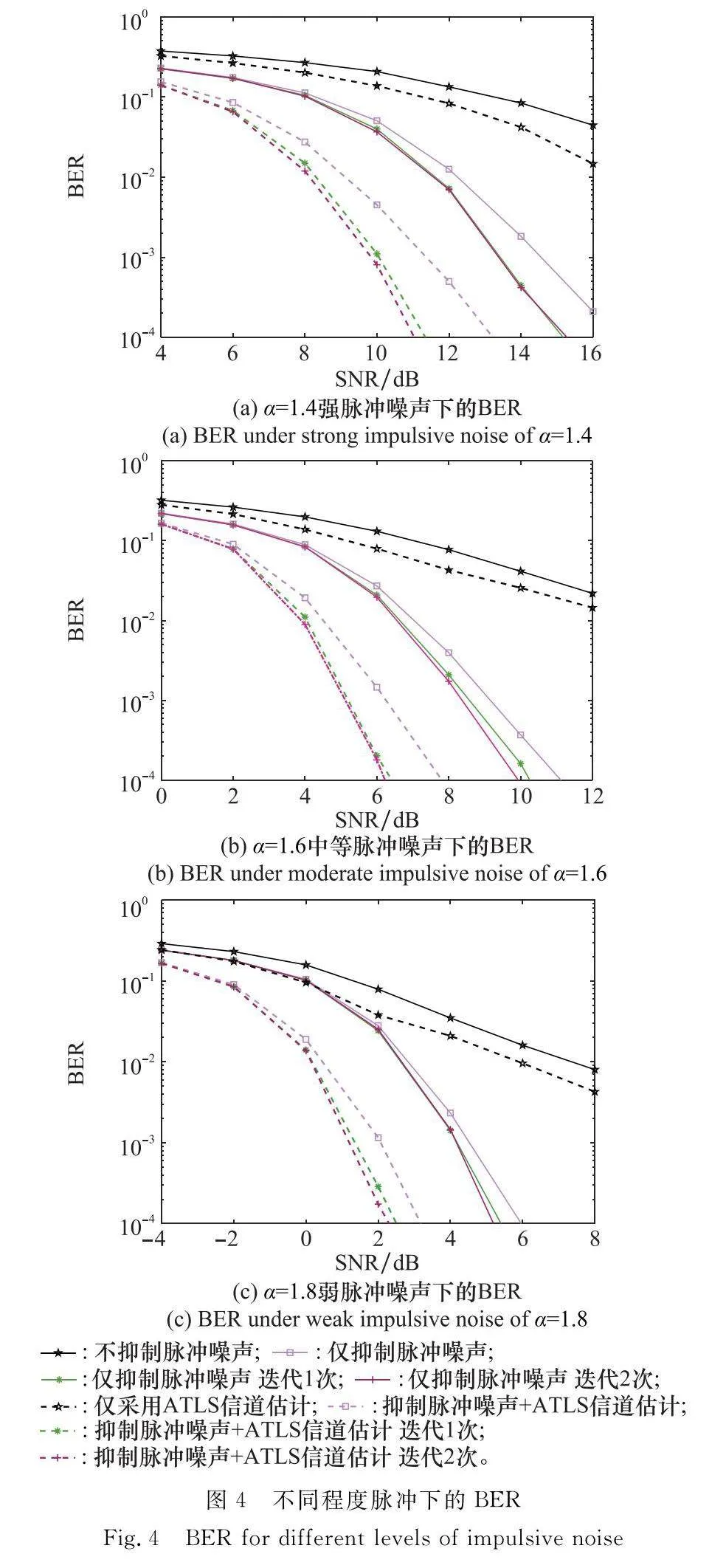
仿真中各算法迭代次数上限为2,仿真结果如图4所示。
图4显示了强脉冲、中等脉冲和弱脉冲噪声环境下,采用提出的脉冲噪声抑制算法与信道估计算法的BER。可以看出,不处理脉冲噪声时,BER较高。本文提出的脉冲噪声抑制算法能够有效抑制脉冲噪声,能显著提高系统的BER性能,并且SNR越高,性能提升越明显。ATLS信道估计算法能够消除残余噪声对信道估计的影响,提升信道估计精度,降低BER。在强脉冲噪声环境下,ATLS信道估计算法提升性能更明显,这是因为脉冲噪声越强,对LS信道估计算法性能影响就越大,通过自适应门限能够有效裁剪由噪声导致的信道冲激响应值。
同时可以看出,迭代过程能够进一步提升系统BER性能,但第2次迭代与第1次迭代相比,性能提升并不明显。考虑到复杂度的增加,在实际中进行一次迭代即可。脉冲噪声越强,迭代算法性能提升越明显,这是因为较强的脉冲干扰对系统性能影响较大,通过迭代过程重构脉冲噪声能够更有效地进行抑制。与LS信道估计算法相比,ATLS信道估计算法迭代一次的SNR增益更加明显。这是因为信道估计精度的提高改善了符号估计精度,有利于迭代过程脉冲干扰的重构。
3.2 性能比较
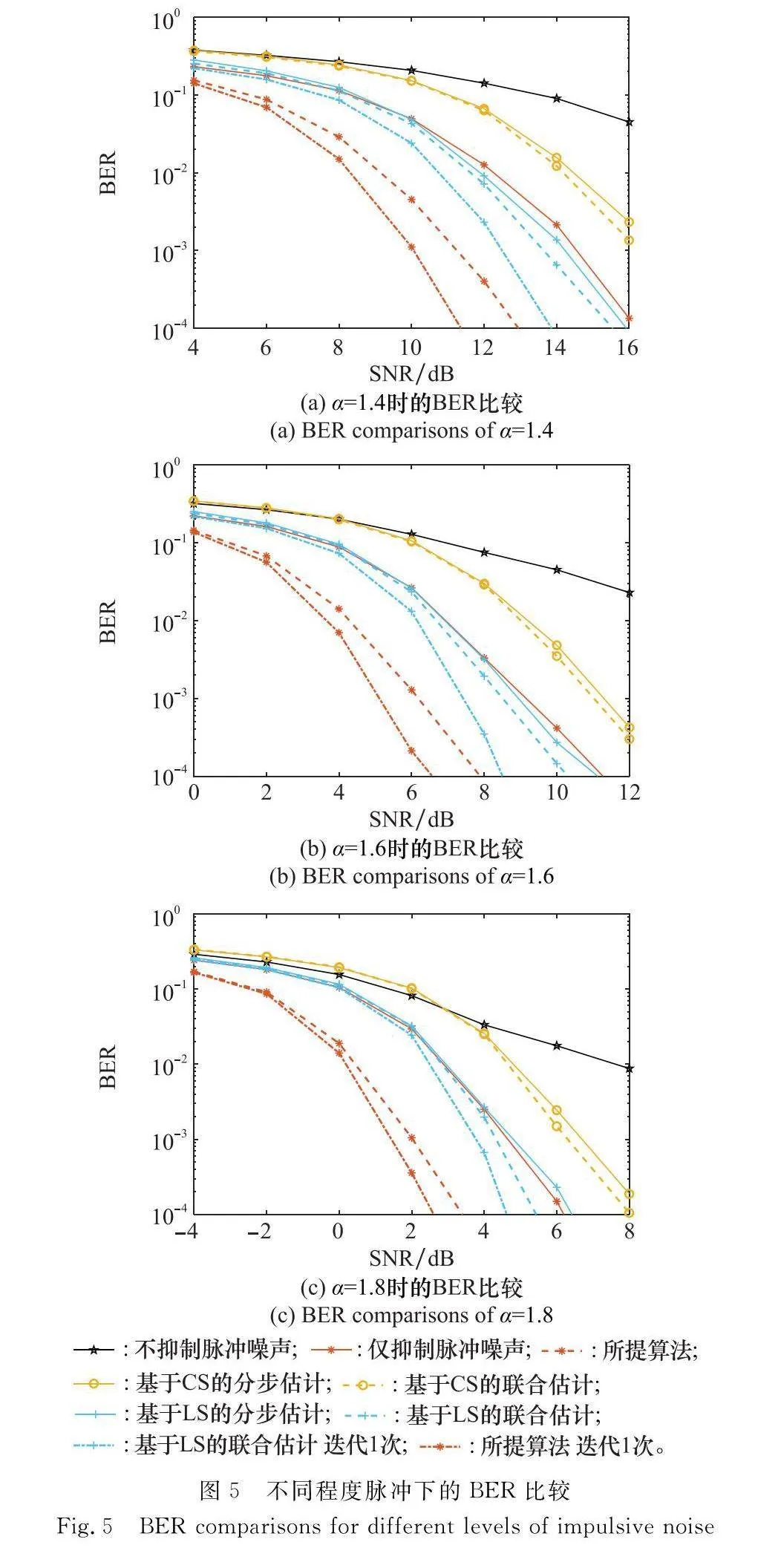
在不同程度脉冲噪声环境下,将本文所提算法与基于LS的脉冲噪声抑制算法[8]和基于CS的脉冲噪声抑制算法[10]进行比较,比较结果如图5所示。
图5的结果表明,提出的脉冲噪声抑制算法性能优于基于CS的分步估计和基于CS的联合估计算法,与基于LS的分步估计算法性能相近,弱于基于LS的联合估计算法。然而,基于CS的算法和基于LS的算法均依赖于空子载波个数,且需要矩阵求逆,复杂度较高。而本文提出的脉冲噪声抑制算法只需要计算接收信号均值和方差,并进行简单比较,复杂度更低。结合ATLS信道估计算法,本文提出的算法系统BER优于基于LS的联合估计算法及其迭代1次的性能。这是由于改进的LS算法抑制了残余噪声对信道估计的影响。同时,本文提出的方法在迭代1次后性能进一步提高。
分别比较图4(a)和图5(a)、图4(b)和图5(b)、图4(c)和图5(c)可以发现,提出的脉冲噪声抑制算法迭代1次的性能和基于LS的联合估计算法性能基本一致,表明载波频偏估计和脉冲噪声估计互相影响[10]。基于LS的联合估计算法估计的是载波频偏和脉冲噪声的联合最优解,而本文提出的脉冲噪声抑制算法可初步抑制较强的脉冲,导致估计的载波频偏存在偏差,在迭代后能够更准确地重构出脉冲噪声,提高载波频偏估计精度。同时,仿真结果表明本文提出的脉冲噪声抑制算法迭代1次的时间小于基于LS的联合估计算法,进一步验证了所提算法具有较低的复杂度。
3.3 实测噪声场景
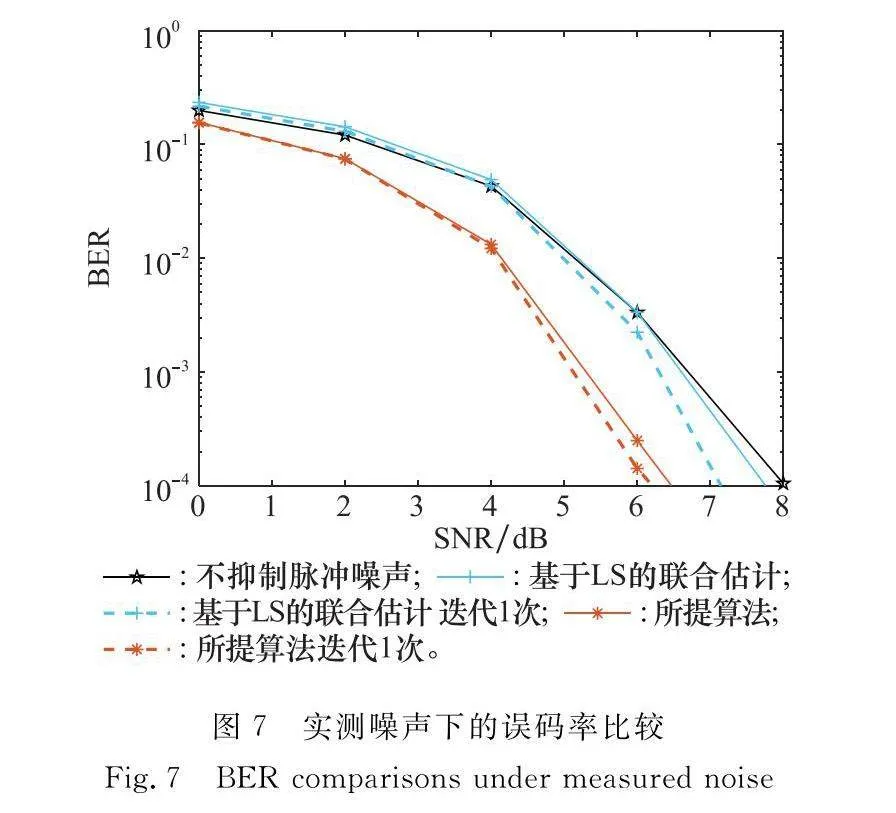
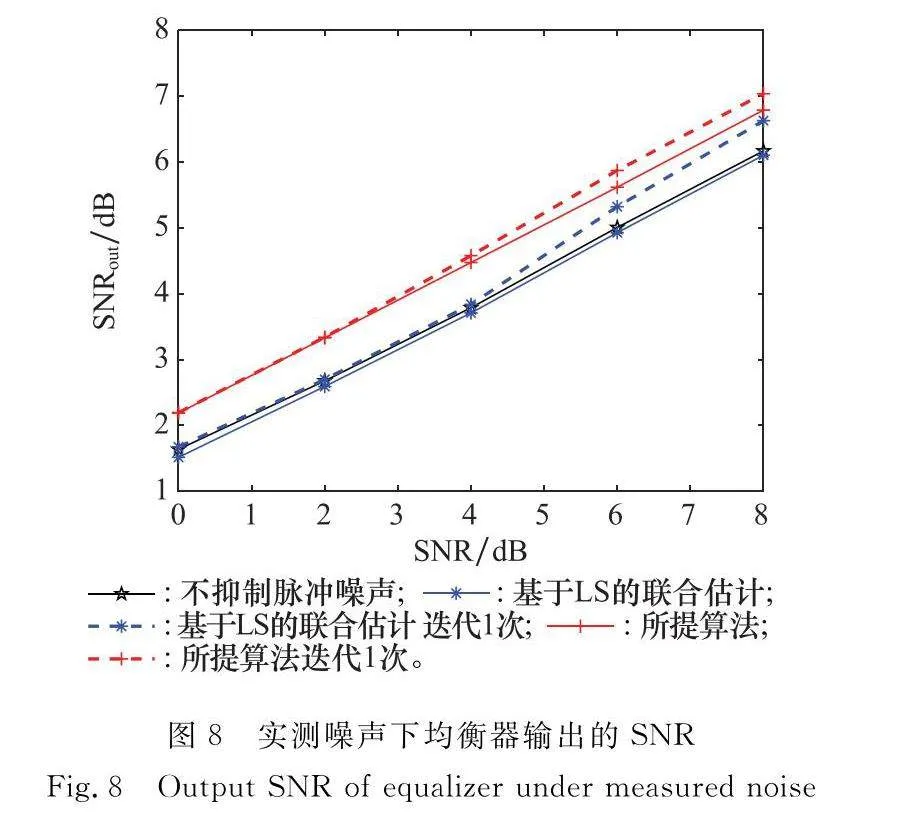
为验证本文提出的算法在实际脉冲噪声环境下的性能,将实测噪声数据与OFDM信号叠加形成通信信号。图6显示的是从图1中截取的一段噪声数据,估计的SαS分布参数为α=1.33和δ=0.051 8。由于数据是截取的,因此与图1数据的特征指数和尺度参数略有不同。在BER和均衡器输出SNR两方面与基于LS的联合估计算法进行比较,结果如图7和图8所示。其中,均衡器输出SNR定义为
SNRout=10lg(E{|sD|2}/E{|sD-s^D|2})(21)
式中:sD和s^D分别表示数据子载波上传输的数据符号序列和均衡器估计的数据符号序列。
从图7可以看出,与图5(a)中α=1.4的仿真结果相比,实测噪声背景下的系统BER性能整体较好。这是由于实测噪声的尺度参数δ=0.051 8,远小于标准SαS分布(δ=1),仿真噪声中脉冲噪声的能量更强。结果表明,本文提出的算法和基于LS的联合估计算法均能有效抑制实际脉冲噪声,降低系统BER,但本文算法性能提升更加明显。在BER为10-4时,与不处理脉冲噪声相比,本文提出的算法能够获得1.5 dB的SNR增益,迭代一次能够获得近2 dB的增益,而基于LS的联合估计算法仅能分别获得约0.3 dB和1 dB的增益。同时,图8显示的均衡器输出SNR表明,本文提出的算法输出SNR更高,符号估计更加准确。
4 结 论
针对脉冲噪声背景下OFDM水声通信系统性能严重下降的问题,本文提出一种迭代脉冲噪声抑制与信道估计算法,以增强系统的稳定性和可靠性。首先,根据脉冲噪声幅值较大的特性,对基带接收信号实部和虚部分别进行脉冲噪声抑制。脉冲噪声抑制算法基于接收数据的统计特性,两次使用切比雪夫不等式检测脉冲干扰,并通过自适应窗口中值滤波算法进行处理。其次,基于LS信道估计算法估计误差的统计特性,提出ATLS信道估计算法,以抑制残余噪声对信道估计的影响。最后,结合估计的信道和均衡译码结果,实现迭代脉冲噪声抑制与信道估计。仿真结果表明,在生成的不同程度脉冲噪声和实测噪声场景下,所提出的算法都能够有效抑制脉冲噪声,显著降低OFDM系统的BER。
参考文献
[1]LI H, DONG Y Y, GONG C H, et al. A non-Gaussianity-aware receiver for impulsive noise mitigation in underwater communications[J]. IEEE Trans.on Vehicular Technology, 2021, 70(6): 6018-6028.
[2]BERGER C R, ZHOU S L, PREISIG J C, et al. Sparse channel estimation for multicarrier underwater acoustic communication: from subspace methods to compressed sensing[J]. IEEE Trans.on Signal Processing, 2009, 58(3): 1708-1721.
[3]TIAN Y N, HAN X, YIN J W, et al. Group sparse underwater acoustic channel estimation with impulsive noise: simulation results based on Arctic ice cracking noise[J]. The Journal of the Acoustical Society of America, 2019, 146(4): 2482-2491.
[4]孟庆松, 王彬, 邵高平. α稳定分布噪声下水声线性调频信号的识别[J]. 系统工程与电子技术, 2018, 40(7): 1449-1456.
MENG Q S, WANG B, SHAO G P. Recognition of underwater acoustic linear frequency modulation signals in α stable distribution noise[J]. Systems Engineering and Electronics, 2018, 40(7): 1449-1456.
[5]SONG G L, GUO X Y, LI H, et al. The α stable distribution model in ocean ambient noise[J]. Chinese Journal of Acoustics, 2021, 40(1): 63-79.
[6]ZHIDKOV S V. Analysis and comparison of several simple impulsive noise mitigation schemes for OFDM receivers[J]. IEEE Trans.on Communications, 2008, 56(1): 5-9.
[7]PETER A O, NG C K, NOORDIN N K. Power line communication (PLC) impulsive noise mitigation: a review[J]. Journal of Information Engineering and Applications. 2014, 4(10): 86-104.
[8]KUAI X Y, SUN H X, ZHOU S L, et al. Impulsive noise mitigation in underwater acoustic OFDM systems[J]. IEEE Trans.on Vehicular Technology, 2016, 65(10): 8190-8202.
[9]MEHBOOB A, ZHANG L, KHANGOSSTAR J. Adaptive impulsive noise mitigation using multi mode compressive sensing for powerline communications[C]∥Proc.of the IEEE International Symposium on Power Line Communications and its Applications, 2012: 368-373.
[10]SUN H X, XU X K, MA L, et al. Carrier frequency offset and impulse noise estimation for underwater acoustic orthogonal frequency division multiplexing[J]. Chinese Journal of Acoustics, 2014, 33(3): 289-298.
[11]殷敬伟, 高新博, 韩笑, 等. 稀疏贝叶斯学习水声信道估计与脉冲噪声抑制方法[J]. 声学学报, 2021, 46(6): 813-824.
YIN J W, GAO X B, HAN X, et al. Underwater acoustic channel estimation and impulsive noise mitigation based on sparse Bayesian learning[J]. Chinese Journal of Acoustics, 2021, 46(6): 813-824.
[12]SUTAR M B, PATIL V S. LS and MMSE estimation with different fading channels for OFDM system[C]∥Proc.of the International Conference of Electronics, Communication and Aerospace Technology, 2017:740-745.
[13]CHIEN Y R. Iterative channel estimation and impulsive noise mitigation algorithm for OFDM-based receivers with application to power-line communications[J]. Proc.of the IEEE Trans.on Power Delivery, 2015, 30(6): 2435-2442.
[14]JELLALI Z, ATALLAH L N. Threshold-based channel estimation for MSE optimization in OFDM systems[C]∥Proc.of the 20th European Signal Processing Conference, 2012:1618-1622.
[15]ZHU H J, GE Y Z, CHEN X F. DFT-based adaptive channel estimation for OFDM systems[C]∥Proc.of the IEEE 16th International Conference on Communication Technology, 2015: 515-517.
[16]SHI X L, YANG Y X, YANG L. Sparse channel estimation in OFDM systems via improved tap detection[J]. International Journal of Future Generation Communication and Networking, 2016, 9(10): 217-226.
[17]DING J J, CHEN Z, HE X, et al. Clustering by finding density peaks based on Chebyshev’s inequality[C]∥Proc.of the 35th Chinese Control Conference,2016: 7169-7172.
[18]ZHANG Z Z, HOU J J, MA Q L, et al. Efficient video frame insertion and deletion detection based on inconsistency of correlations between local binary pattern coded frames[J]. Seurity and Communciation Networks, 2015, 8(2): 311-320.
[19]WANG J J, LI J H, YAN S F, et al. A novel underwater acoustic signal denoising algorithm for Gaussian/non-Gaussian impulsive noise[J]. IEEE Trans.on Vehicular Technology, 2020, 70(1): 429-445.
[20]TAN G, YAN S F, YANG B B. Impulsive noise suppression and concatenated code for OFDM underwater acoustic communications[C]∥Proc.of the IEEE International Conference on Signal Processing, Communications and Computing, 2022.
[21]WANG S C, HE Z Q, NIU K, et al. New results on joint channel and impulsive noise estimation and tracking in underwater acoustic OFDM systems[J]. IEEE Trans.on Wireless Communications, 2020, 19(4): 2601-2612.
[22]BANERJEE S, AGRAWAL M. On the performance of underwater communication system in noise with Gaussian mixture statistics[C]∥Proc.of the 12th National Conference on Communications, 2014.
[23]LIN J, NASSAR M, EVANS B L. Impulsive noise mitigation in powerline communications using sparse Bayesian learning[J]. IEEE Journal on Selected Areas on Selected Areas in Communications, 2013, 31(7): 1172-1183.
[24]GUPTA M R, CHEN Y H. Theory and use of the EM algorithm[J]. Foundations and Trends in Signal Processing, 2011, 4(3): 223-296.
[25]DOU Z, SHI C Z, LIN Y, et al. Modeling of non-Gaussian colored noise and application in CR multi-sensor networks[J]. EURASIP Journal on Wireless Communications and Networking, 2017, 2017: 1-11.
[26]QARABAQI P, STOJANOVIC M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels[J]. IEEE Journal Oceanic Engineering, 2013, 38(4): 701-717.
[27]WANG Z Z, LI Y Z, WANG C C, et al. A-OMP: an adaptive OMP algorithm for underwater acoustic OFDM channel estimation[J]. IEEE Wireless Communications Letters, 2021, 10(8): 1761-1765.
[28]TADAYON A, STOJANOVIC M. Iterative sparse channel estimation and spatial correlation learning for multichannel acoustic OFDM systems[J]. IEEE Journal of Oceanic Engineering, 2019, 44(4): 820-836.
[29]廖志宇, 朱广平, 殷敬伟, 等. 冰下脉冲噪声特性及信号检测性能分析[J]. 哈尔滨工程大学学报, 2021, 42(5): 670-679.
LIAO Z Y, ZHU G P, YIN J W, et al. Characteristics of impulse noise under ice and performance analysis of signal detection[J]. Journal of Harbin Engineering University, 2021, 42(5): 670-679.
[30]赵世铎, 鄢社锋. 基于扩展路径识别算法的水声OFDM系统低复杂度迭代稀疏信道估计[J]. 电子与信息学报, 2021, 43(3): 752-757.
ZHAO S D, YAN S F. Low-complexity iterative sparse channel estimation for underwater acoustic OFDM systems based on generalized path identification algorithm[J]. Journal of Electronics amp; Information Technology, 2021, 43(3): 752-757.
作者简介
谭 钢(1996—),男,博士研究生,主要研究方向为水声信道估计与信道均衡。
鄢社锋(1978—),男,研究员,教授,主要研究方向为阵列信号处理、水声通信。
叶子豪(1996—),男,博士研究生,主要研究方向为水声信道估计与信道均衡。
杨基睿(1998—),男,博士研究生,主要研究方向为水声信号处理与目标识别。
