
基于局部感知的无人艇集群过复杂障碍场方法
2024-11-26 00:00:00刘昊张云飞赵继成
系统工程与电子技术 2024年8期










摘 要: 针对当前基于中央控制策略解决无人艇(unmanned surface vehicle, USV)过复杂障碍场智能化程度不足的问题,提出一种基于局部感知的USV集群自主决策通过复杂障碍场方法。所提方法采用自组织协同思想,利用USV的局部感知能力获取周边水域的有效信息,将自组队形和自主避障决策权交由USV执行,促使集群自组织通过复杂障碍场并达成无序到有序的队形演化。仿真结果表明,采用所提方法的集群过复杂障碍场过程明显优于基于人工势场的同类方法。所提方法可在确保生存率前提下自组织实时集群自组队形、自主避障和自适应航行,对提升集群适应能力具有重要意义。
关键词: 无人艇集群; 局部感知; 复杂障碍场; 自组队形; 安全规避
中图分类号: TP 24
文献标志码: A
DOI:10.12305/j.issn.1001-506X.2024.08.30
Formation control of unmanned surface vehicle swarm in dense environment
based on local perception
LIU Hao1,2, ZHANG Yunfei1,*, ZHAO Jicheng1
(1. Yunzhou Intelligent Technology Co., Ltd., Zhuhai 519082, China;
2. Shenzhen Research Institute, Yunzhou Innovation Technology Co., Ltd., Shenzhen 518106, China)
Abstract: Aiming at the current problem of insufficient intelligence for unmanned surface vehicle (USV) in solving the problem of dense environment crossing based on the central control strategy, a method of autonomous decision-making of USV swarms dense environment crossing based on local perception is proposed. The proposed method adopts the idea of self-organizing collaboration, uses the local perception ability of the USV to obtain effective information of the surrounding waters, and hands over the self-organizing formation and autonomous obstacle avoidance decision-making power to the USV to promote the swarm self-organization cross the dense environment and achieve the formation evolution from disorder to order. Simulation results show that the process of swarm dense environment crossing using this method is obviously better than similar methods based on artificial potential field. The proposed method can self-organize real-time swarm self-organizing formation, autonomous obstacle avoidance, and adaptive navigation under the premise of ensuring survival rate, which is of great significance for improving swarm adaptability.
Keywords: unmanned surface vehicle (USV) swarm; local perception; dense environment; self-organized formation; safe avoidance
0 引 言
以无人艇、无人机、无人潜航器为代表的无人集群协同运动模型[1]是当今多智能体无人系统发展的高阶形态,相比于常规的有人-无人协同系统,无人集群呈现出数量规模大、人工干预少、协同等级高、高度智能化等显著特征[2]。随着海洋领域研究的深化拓展,无人艇集群在海洋勘探、区域巡逻、环境数据采集等协同任务中,能够有效降低人工执行成本,提升任务执行效率,作为无人集群自组织行为控制的研究对象具备较高的应用价值。
自组织无人艇集群是无人集群控制的高阶形态[3],区别于基于中央控制模式,集群内各艇通过对周边水域环境的局部感知获取障碍信息,基于有限数据通信获取周边无人艇交互信息,以此为基础实施有限数据条件下的自主决策,使无人艇集群最大限度模拟鱼群等生物群落,实施集群运动、自组队形以及通过复杂障碍场等高阶集群行为。在自组织行动过程中,集群内各艇保持独立决策能力,并通过整体行为共同完成复杂任务,因此自组织无人艇集群属于集群涌现式智能[4]。对集群行为的研究起源于Reynolds等[5]对鸟群行为的相关研究和计算机仿真,Reynolds等首次提出了群体行为“聚集-分离-对齐”基础规则;在Reynolds等的研究基础上,Toner等[6-8]均为集群行为研究贡献了一系列卓有成效的工作,构建出无人集群动力学模型,但上述模型均为自由空间的集群行为仿真,对复杂障碍场通行和局部感知决策涉猎不深。
复杂障碍场通行问题是无人集群应用中的基础问题,对于投入应用的多智能体系统而言,其既要能够充分发挥集群的规模效应,又要在最小化交互控制约束下确保集群快速穿越复杂障碍场,特别是在水域条件动态多变的情况下,集群通过复杂障碍场的成功率是提升多智能体系统应用能力的关键指标[9]。为了便于研究,将水域场景近似描述为二维平面,进而将无人艇集群通过复杂障碍场问题抽象为二维空间内多智能体集群穿越多障碍网格问题。
国内外许多学者对集群协同通过复杂障碍场问题进行了广泛而深入的分析,同类研究大致可划分为:以规则化行为为研究对象的集群控制算法,如Reynolds等模拟鸟群飞行行为构建的Boids模型[5],Kwong等[10]构建的复杂行为集群控制模型,Wang等[11]提出的移动自治智能群体控制模型,Cucker等[12]基于邻接矩阵的集群相对速度模型,Cavagna等[13]建立的欧椋鸟集群运动模型,Hereford等[14]结合粒子群算法提出的改进Boids模型等。上述算法的优点在于规则执行简单,算法效率高且易于工程应用,缺点在于难以适应现实环境中的高复杂性和集群行为的多样不确定性,简单规则难以解决大规模集群的生存问题。以空间力学约束为研究对象的集群控制算法,相关算法以人工势场算法为代表[15],通过引入人工势场实现无人集群的行为控制(来自目标的定向力和来自感知范围内其他智能体或障碍的斥力),如Fiorini等[16]提出的速度障碍规则人工势场模型,Santos等[17]提出的虚拟群组规则人工势场模型,Woods等[18]提出的相对速度规则人工势场模型,Harder[19]提出的通用无人机集群控制模型,郭褚冰等[20]提出的vicesk集群控制模型等。上述算法的优点在于能够应对复杂多变的障碍环境,智能体行为易于计算和预测,缺点则是对空间中异常点位置的处理困难(如引力、斥力合力为0的局部抖动点),单个智能体难以做出符合自身生存利益的个性化决策;以启发式优化为研究对象的集群控制算法,包括遗传算法[21]、粒子群优化算法[22]、蚁群算法[23]等,此类算法的优点在于集群行为经过全局优化,能够获得最佳避障和通行效果,缺点则是中央控制和启发式预优化消耗了额外的计算资源,时效性和动态环境适应性较差。
本文在先前研究基础上,提出一种基于无人艇局部感知功能的集群通过复杂障碍场方法,区别于人工势场法和启发式优化方法,本文方法立足于无人艇自身的局部感知功能,模拟生物群体的避障、组队和通行行为,将决策权分发到各艇单独执行,避免了引力斥力造成的局部抖动和启发优化造成的中央控制限制。在控制模式上,本文采用自组织协同思想,利用无人艇从其邻居节点和周边环境中获取有价值信息;在行为模式上,本文利用避障和组队的简单规则实现集群宏观层面的自组队形、安全规避和通过复杂障碍场;在调控模式上,本文设计了3级架构分别调控无人艇的航向、航速和目标参数,通过实时调控达成集群宏观层面的适应优化。
1 无人艇集群控制模型
设集群规模为n,其中智能体i和j的相对速度为vi、vj,集群自适应组队和调整过程为各智能体通过改变相对速度和位置实现集群层面的队形稳定,在经过一段时间Δt后,集群内各智能体的运动方向保持一致,速度相同[24],即满足:
1.1 基础规则
(1) 集群中不存在固定领导者角色的无人艇,中心艇和追随艇可自由切换,不存在硬件差异;
(2) 集群内各艇在任务执行过程中只接收指挥中枢传递的目标信息,无需接收其他指令;
(3) 无人艇存在航速上限;
(4) 无人艇存在最少控制条件限制,在最少指挥控制参与情况下,完成集群通过复杂障碍场的动作;
(5) 无人艇存在通信范围限制,即只能在固定通信范围内与周边艇保持数据传输,模拟复杂障碍场的受限通信约束;
(6) 集群内各艇不应触碰任务区域边界和障碍物,不能两艇相撞,最大限度提升生存率。
1.2 航向规则
不同于无人机控制规则,无人艇在水域中游走的航向受限于水流阻力,难以在短时间内实现航向大幅改变,因此在航向控制中,应引入惯性航向因变量(艏向),实时航向受上一时刻的艏向限制,在控制上限内改变并向实时航向靠拢。设无人艇当前的艏向为f0,目标方向为ft,则转向夹角α的计算公式为
设中心艇的航向为fc,则无人艇航向f的计算公式为
1.3 航速规则
无人艇航速受限于额定航速、洋流速度、风向风速等多种因素,相较于无人机的航速控制更为复杂,本文主要考虑无人艇的转弯惯性作用、目标靠拢减速、自组队形增速3种情况。设无人艇的规定航速为v0,则受限于转向夹角α限制,无人艇的惯性航速vg的计算公式为
设无人艇距行进目标的距离为dt,则无人艇的减速航速vd的计算公式为
设中心艇的实时航速为vc,则无人艇的组队航速vf的计算公式为
1.4 位移规则
无人艇的应用场景主要为宽阔海域或复杂地形水域,受限于各类环境因素,无人艇的实时位置与期望位置之间难以保持完全对应,导致无人艇在行驶过程中产生随机偏差,随机偏差一定存在且不受控制,因此为了拟合真实水域环境,有必要引入随机漂移变量。设每个步长的随机位移参数为φ(-5≤φ≤5),无人艇当前时刻的位置坐标为(x0,y0),实时航速(即为组队航速)为vf,实时航向为f,则下一步长时刻的位置坐标(x′,y′)的计算公式为
1.5 基础规则避免“抖动”问题的原理
“抖动”问题来源于人工势场类算法的固有弊端,当无人集群以目标为引力源,以周边障碍(含无人艇)为斥力源,自主向目标游走时,设某时刻第i艇的实时航速为vi,到达位置设为pi(xi,yi),考虑到引力源的单一性和斥力源的多样性,在大范围集群游走过程中,存在某个时刻,引力、斥力合力为0,vi=0而未到达目标地域pm(xm,ym)的可能:
在上述情况中,pi向目标靠近,则斥力大于引力,导致vilt;0;pi向障碍靠近,则引力大于斥力,导致vigt;0,造成无人艇的小范围内“抖动”效果。本算法避免“抖动”问题发生的原理为:各艇基于局部感知,只获取周边水域内障碍、无人艇和目标信息,由于无人艇处于运动过程中,各时刻获取的周边障碍状态均处于动态变化中,导致航速、航向发生相应变化,由于局部感知的存在和游走避障算法特性,导致:
即对于任意vi=0时的无人艇,其必然到达目标区域。
2 集群过复杂障碍场方法
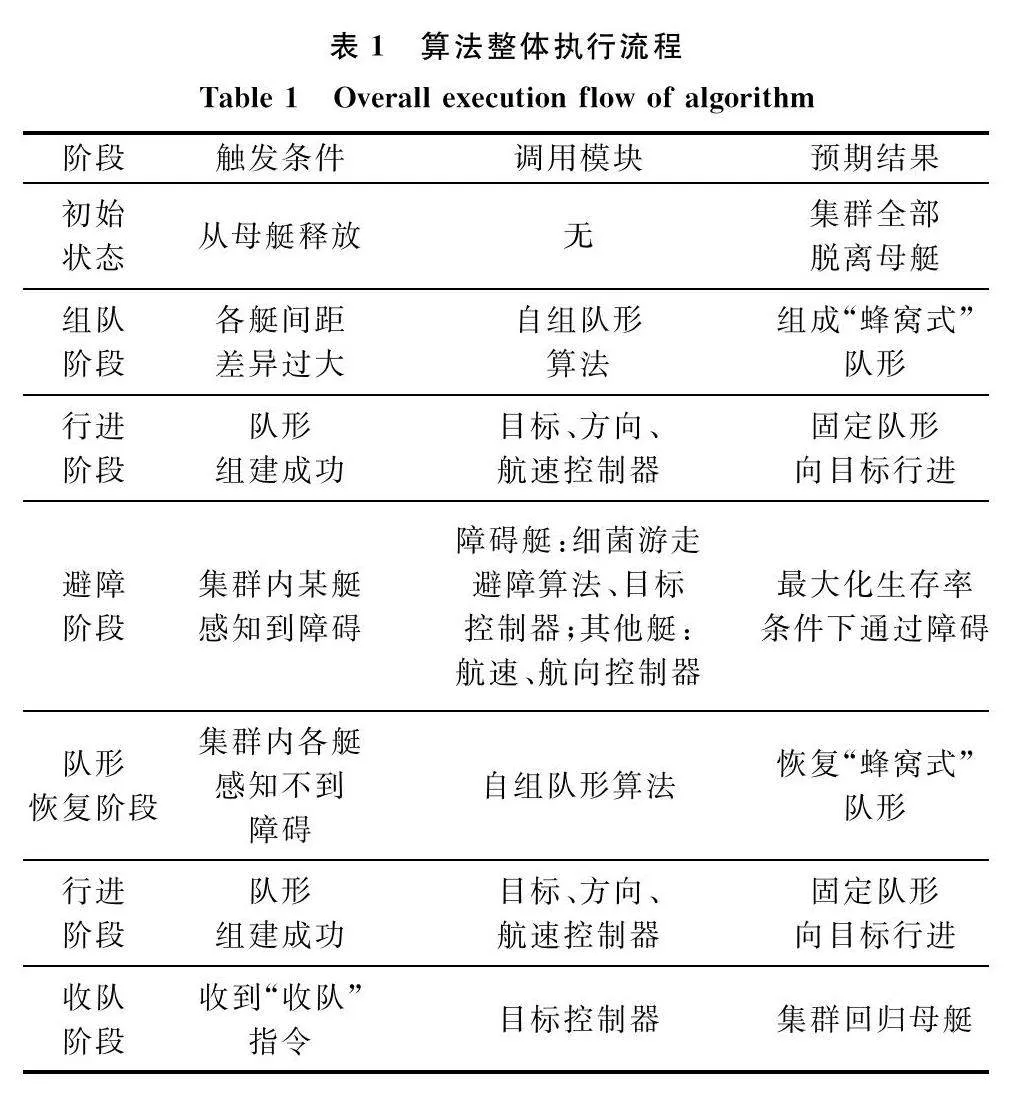
过复杂障碍场方法主要由3部分构成,分别为细菌游走避障算法、自组队形算法、三级控制器架构。细菌游走避障算法的核心思路是不走“回头路”,虽然在顺时针或逆时针游走过程中可能走“绕圈路”,但因为一直向未知地域探索,只要水域属于连通状态,在有限时间内均能抵达目标位置。自组队形算法的核心思路是赋予各艇自主选择行进目标的权力,通过频繁引导无人艇向中心艇靠拢,并向周边第三近无人艇等距游走,实现“蜂窝式”队形自组织生成。两种算法的融合使用,确保了集群内各艇在自组队形和规避障碍之间达成行动平衡,生成满足上述算法约束的行进轨迹。然后,由三级控制器架构执行复杂障碍场通行过程,分别调用细菌游走避障算法和自组队形算法计算无人艇的实时行进方向和行进目标,再利用位置和方向输入量计算实时行进速度,实现对集群的运动控制。算法的整体执行流程如表1所示。
总体算法流程图如图1所示。
2.1 细菌游走避障算法
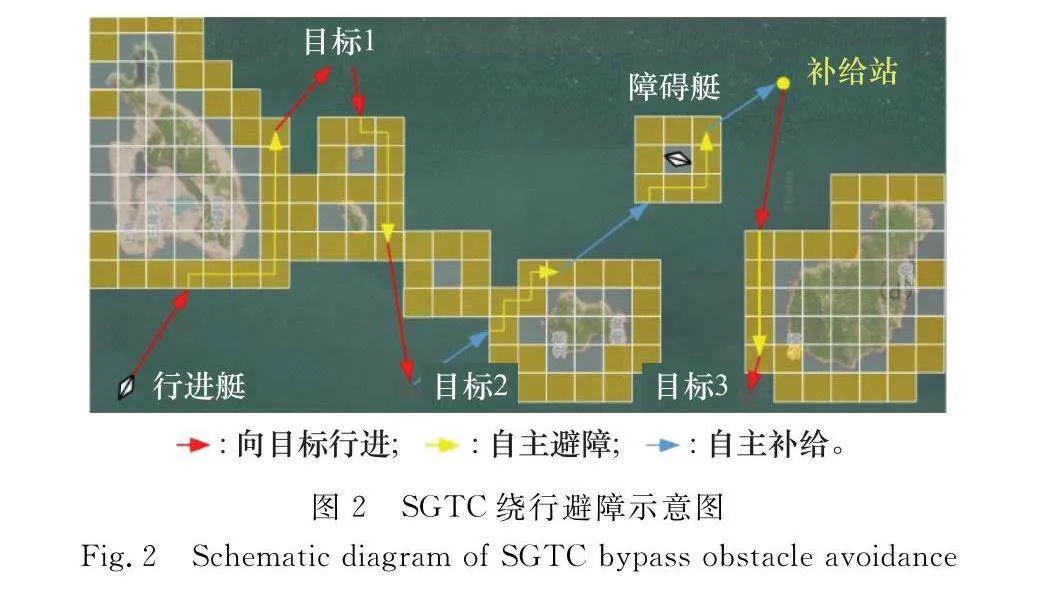
细菌游走避障算法的原理可归纳如下:自然界中的带鞭毛细菌可通过旋转自身鞭毛实现对障碍物的绕行,这类绕行动作的原则为:一是不走回头路;二是以局部态势为目标规划避障路线;三是始终与障碍保持“等距”。基于此原则,引入等距区域概念,在障碍物的周边“九宫格”区域产生“等距区”,以方格轨迹单元(square grid trajectory cell, SGTC)表示;SGTC的特性为闭包状态,即无论障碍物为何种形状,只要无人艇沿SGTC中心行进,在一定时间后均可绕过障碍;完成绕行的先决条件为不能走“回头路”。SGTC绕行避障示意图如图2所示。
算法预先条件:
(1) 无人艇所在的水域网格会显示“占用”,无人艇在游走过程中,会持续占用各网格,进而可在网格结构体中查询到是否被占用,被哪艘无人艇占用;
(2) 每个网格增加检索项关键词,用网格坐标序号制作检索关键词;
(3) 无人艇结构体新增“来自网格”,无人艇在游走过程中,用“来自网格”存储上一个途径的水域网格,确保在避障过程中无人艇不走“回头路”,只对前方未知水域探索游走。
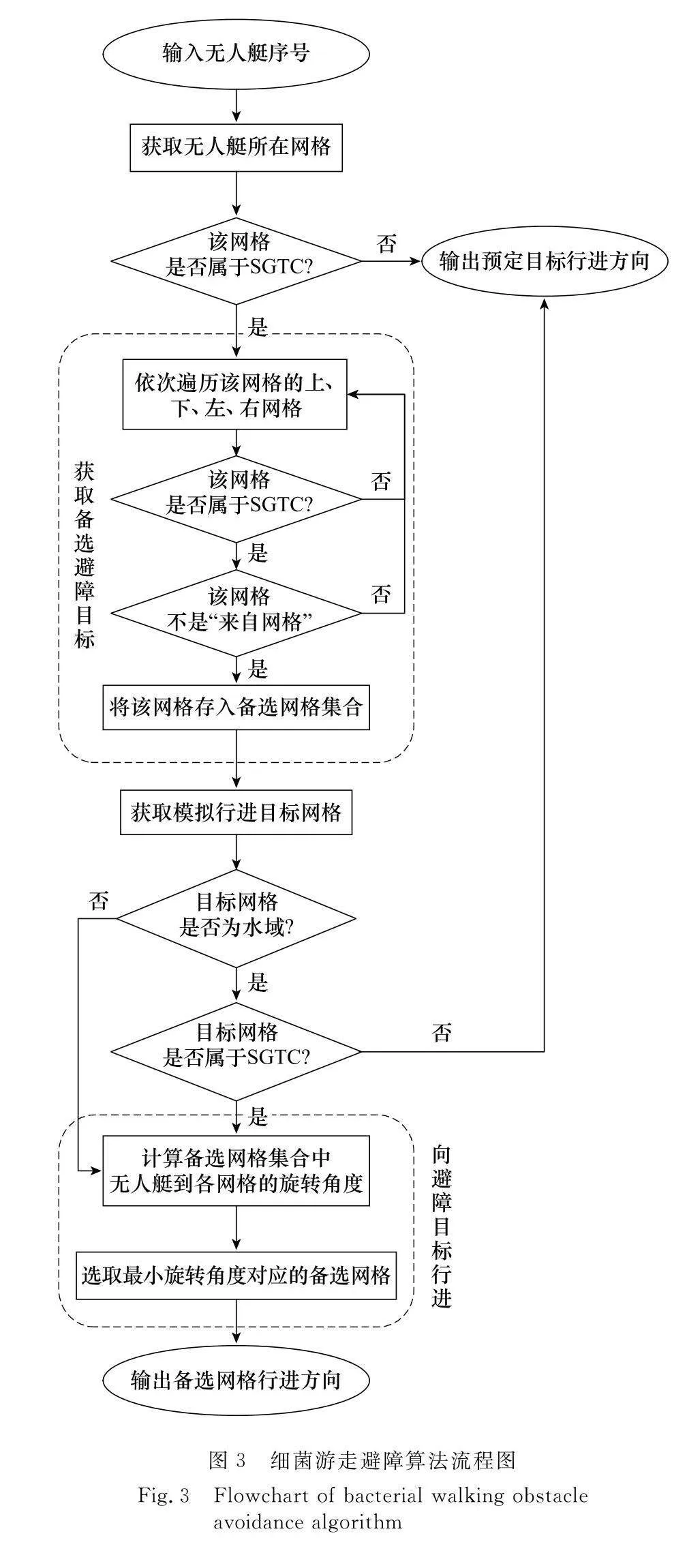
在设计上述预先条件基础上,设计细菌游走避障算法如下所示。
步骤 1 输入当前无人艇编号;
步骤 2 获取无人艇所在网格;
步骤 3 转子算法:判断网格是否属于SGTC。若不是,则直接向预定目标行进;
步骤 4 若网格属于SGTC,则获取备选避障目标,具体包含:
步骤 4.1 获取无人艇的来自网格检索项;
步骤 4.2 采集无人艇所在网格的上、下、左、右网格,采用转子算法判断网格是否属于SGTC;若是,且该网格不是“来自网格”(无人艇上一时刻所在网格),则将其存入备选避障目标集合;
步骤 4.3 若网格不属于SGTC,则重复步骤2~步骤4,直至采集完成;
步骤 5 判断是否向目标行进,具体包含:
步骤 5.1 沿无人艇当前位置向目标方向行进150 m,获取模拟行进目标网格;
步骤 5.2 判断该网格属性是否为水域。若不是,则转步骤6;
步骤 5.3 若网格属性为水域,则采用转子算法,判断该网格是否属于SGTC;若不是,则向目标行进,否则转至步骤6;
步骤 6 向备选避障目标行进,具体包含:
步骤 6.1 计算备选目标集合中到达各网格的旋转角度;
步骤 6.2 选取最小旋转角度对应的备选目标网格;
步骤 6.3 选取最小旋转角度网格,无人艇向该网格行进;
步骤 7 重复步骤2~步骤7,直至无人艇到达预定目标。
细菌游走避障算法的流程图如图3所示。
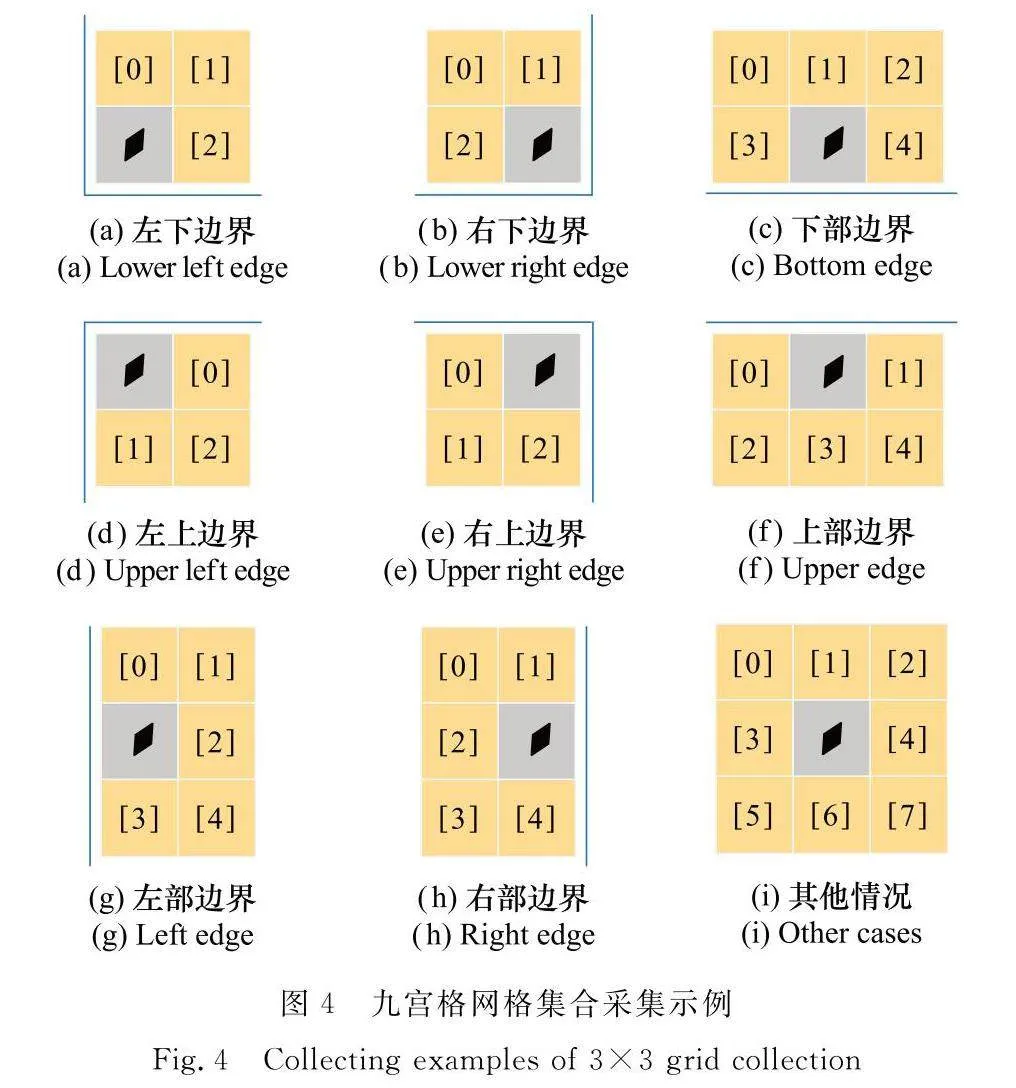
其中,子算法判断网格是否属于SGTC的执行原理可描述如下:首先判断网格属性,若为障碍则输出1(该网格不属于SGTC);而后采集该网格的周边网格,生成九宫格网格集合;最后遍历九宫格网格集合,若存在网格属性为障碍或被其他无人艇占用,则输出true(该网格属于SGTC),否则输出1。为了防止采集过程中的“超界”数据溢出问题,以规则形式约束采集流程,采集九宫格网格集合的示例如图4所示。
2.2 自组队形算法
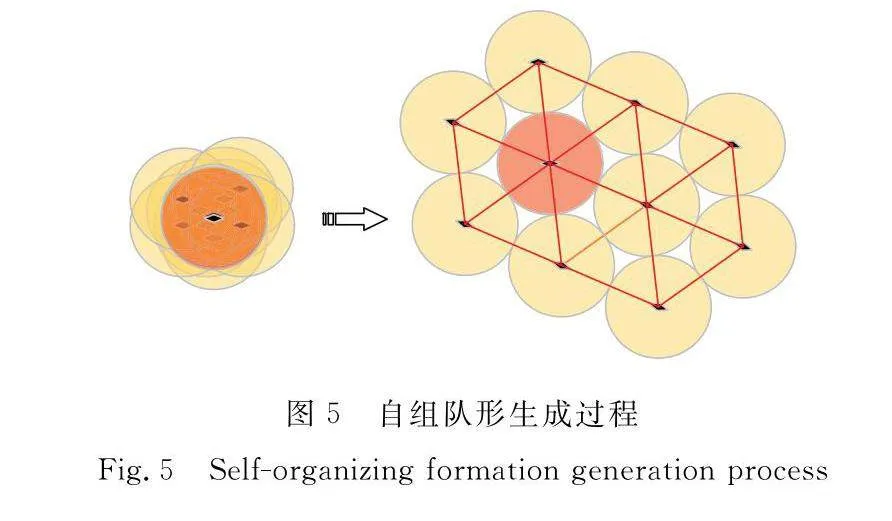
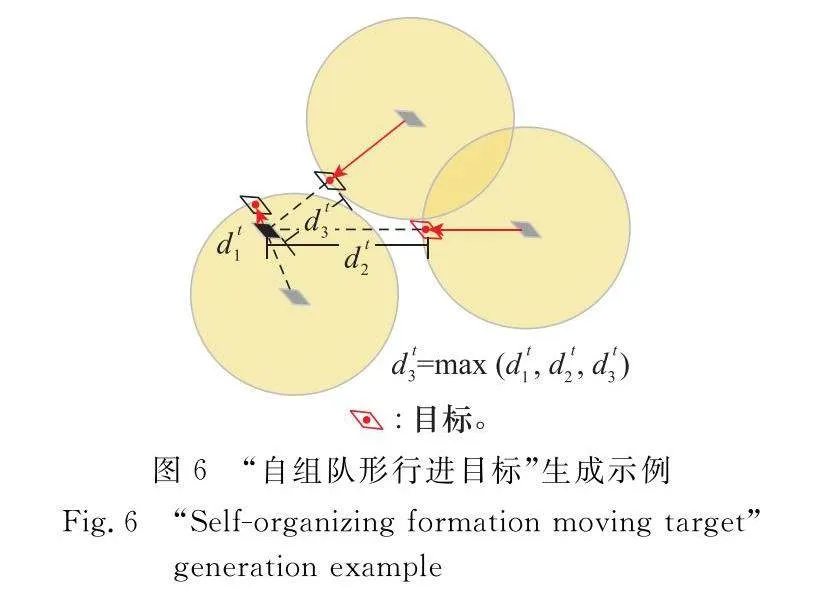
在细菌游走避障算法执行的基础上,通过频繁变换各追随艇“目标”变量,达成队形的自组织生成。算法原理可归纳为:在集群组建队形过程中,各艇之间的距离处于动态变化中,通过计算各艇周边3艘近距离艇的“队形间距”,即可产生当前时刻的“自组队形行进目标”,进而可控制无人艇向该目标行进;通过频繁调节各艇的自组队形行进目标,即可在有限时间内产生蜂巢型的稳定队形结构。自组队形生成过程如图5所示。其中,无人艇获取“自组队形行进目标”生成示例如图6所示。
算法执行流程包括如下7个步骤。
步骤 1 输入无人艇序号,设其当前位置为(x0,y0);
步骤 2 设置无人艇的自组队形间距,设为df,默认df为1 000;
步骤 3 若该艇与中心艇的距离超过2倍自组队形间距,则返回中心艇目标位置,代表以中心艇为目标行进;
步骤 4 若集群内艇数小于3,则返回中心艇目标位置;
步骤 5 计算与该艇最近的附近无人艇的相对直线距离,进而获取距离最近的3艘无人艇的位置,设为(x1,y1)、(x2,y2)、(x3,y3);
步骤 6 计算自组队形行进目标,具体包含:
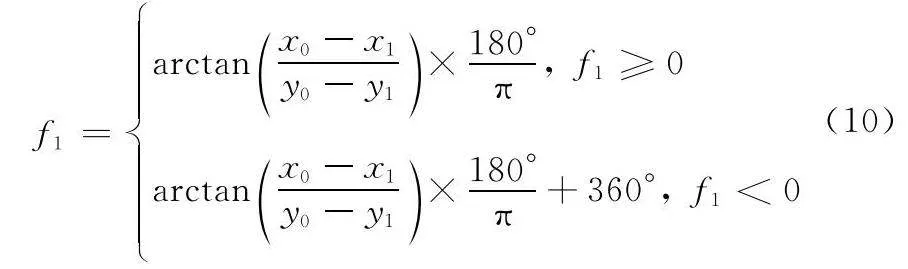
步骤 6.1 计算附近3艇的反向方向,即从附近艇到该艇的方向,设为f1、f2、f3;以f1为例,计算公式如下所示:
f2、f3以此类推。
步骤 6.2 计算备选行进目标,即以附近艇为出发点,沿反向方向延伸自组队形间距,确定3个备选行进目标(xt1,yt1)、(xt2,yt2)、(xt3,yt3);以(xt1,yt1)为例,计算公式如下所示:
(xt2,yt2)、(xt3,yt3)以此类推。
步骤 6.3 计算输入艇与备选行进目标之间的距离,设为dt1、dt2、dt3,选取最远距离对应的目标作为自组队形行进目标(xt0,yt0);
步骤 7 输出自组队形行进目标(xt0,yt0)。
自组队形算法流程图如图7所示。
2.3 三级控制器架构
三级控制器架构的原理可归纳为:无人艇的控制变量可简化为行进速度(标量无方向)、行进方向(艏向)、行进目标位置(航向)。3个控制变量共同作用,促使无人艇产生带有惯性转向的行进动作,考虑到自组队形和避障控制的作用,本文做出原创设计,将行进方向赋予细菌游走避障算法,即由细菌游走避障算法生成无人艇的实时行进方向。将行进目标位置赋予自组队形算法,即由自组队形算法生成无人艇的实时行进目标。由无人艇根据当前位置、目标位置、行进方向共同计算当前时刻的行进速度,进而实现对无人艇的航行动作三级控制。在三级控制架构下,指控中心可通过控制中心艇的行进目标,间接控制各追随艇的行进目标,产生集群按队形游走轨迹和复杂障碍场通行轨迹。在细菌游走避障算法和自组队形算法的设计基础上,通过设计中心艇-追随艇的控制流程,实现集群通过复杂障碍场并组建、恢复队形的轨迹规划。主要工作包含:设计中心艇的控制器、设置各艇的实时航速控制器。执行流程包括如下7个步骤。
步骤 1 输入集群内的艇数、航速、自组队形间距;
步骤 2 循环遍历各艇,控制各艇行进目标,具体包含:
步骤 2.1 若判断无人艇为中心艇,则赋予指控中心控制目标,即以人工控制方式指挥中心艇行进;
步骤 2.2 若判断无人艇不是中心艇,则调用自组队形算法,赋予各追随艇自组队形的行进目标;
步骤 3 控制各艇行进方向,具体包含:
步骤 3.1 调用细菌游走避障算法,赋予集群内各艇实时的避障行进方向,实现在向目标行进过程中生成实时避障行进方向;
步骤 3.2 根据式(2)计算实时避障行进方向和上一时刻方向的夹角;
步骤 3.3 进行判断,若αgt;180°,则依据式(3)顺时针旋转无人艇的艏向;
步骤 3.4 若α≤180°,逆时针旋转无人艇的艏向;
步骤 4 控制各艇的实时航速,具体包含:
步骤 4.1 切换规定航速的单位进制,由“节”切换为“m/s”;
步骤 4.2 依据式(4)计算惯性航速;
步骤 4.3 依据式(5)计算减速航速;
步骤 4.4 依据式(6)赋予各艇组队航速;
步骤 5 依据式(7)更新当前艇位置;
步骤 6 更新当前艇的来自网格和占据网格,用于细菌游走避障算法;
步骤 7 重复步骤2~步骤6,直至集群任务结束。
3 仿真实验及分析
为验证本文方法在集群过复杂障碍场过程中的有效性,开展了10艇规模分布控制架构下的无人艇集群全流程数值仿真,过复杂障碍场阶段划分如图8所示。中心艇与其他9艘追随艇构成分布式星型组网通信结构,通信原则如下:① 指控中心可直接控制中心艇,实时向其发送目标位置,接收中心艇反馈的集群实时轨迹数据;② 中心艇与各追随艇之间建立星型通信,追随艇获取中心艇转发的目标位置,中心艇获取各追随艇发送的实时轨迹数据并定期将数据转发至指控中心;③ 指控中心与各追随艇之间无直接通信,不能直接指挥追随艇行动;④ 集群内各艇根据自身感知设备采集周边水域环境数据,自主完成避障游走,无需指控中心干预。为了验证集群过复杂障碍场过程的有效性,本文将过复杂障碍场过程划分为3个阶段,分别如下:① 从集群组队完成开始向复杂障碍场行进,到集群感知到复杂障碍场存在,命名为组队行进阶段(阶段1);② 从集群感知到复杂障碍场存在,到集群全部通过复杂障碍场,命名为过复杂障碍场阶段(阶段2);③ 从集群全部通过复杂障碍场,到集群再次组队完成,命名为队形恢复阶段(阶段3)。由上述定义可知,集群自组队形行进执行各类过复杂障碍场任务的过程,均可拆分为阶段1~阶段3的往复循环过程。控制参数包括:自组队形间距(用于配置自组队形中任意相邻两艇的距离)、队形保持阈值(用于配置自组队形间距的误差,若阈值为0.1,自组队形间距为1 000 m,则间距取值范围在900~1 100 m之间)、常规航速调参(无人艇最大航速与调参乘积为常规航速)。设集群内艇数为n,第i艘无人艇与周边最近无人艇的距离为di,距离平均值为d-,则距离标准差σd的计算公式为:
集群过复杂障碍场阶段划分如图8所示。
3.1 集群运动状态分析
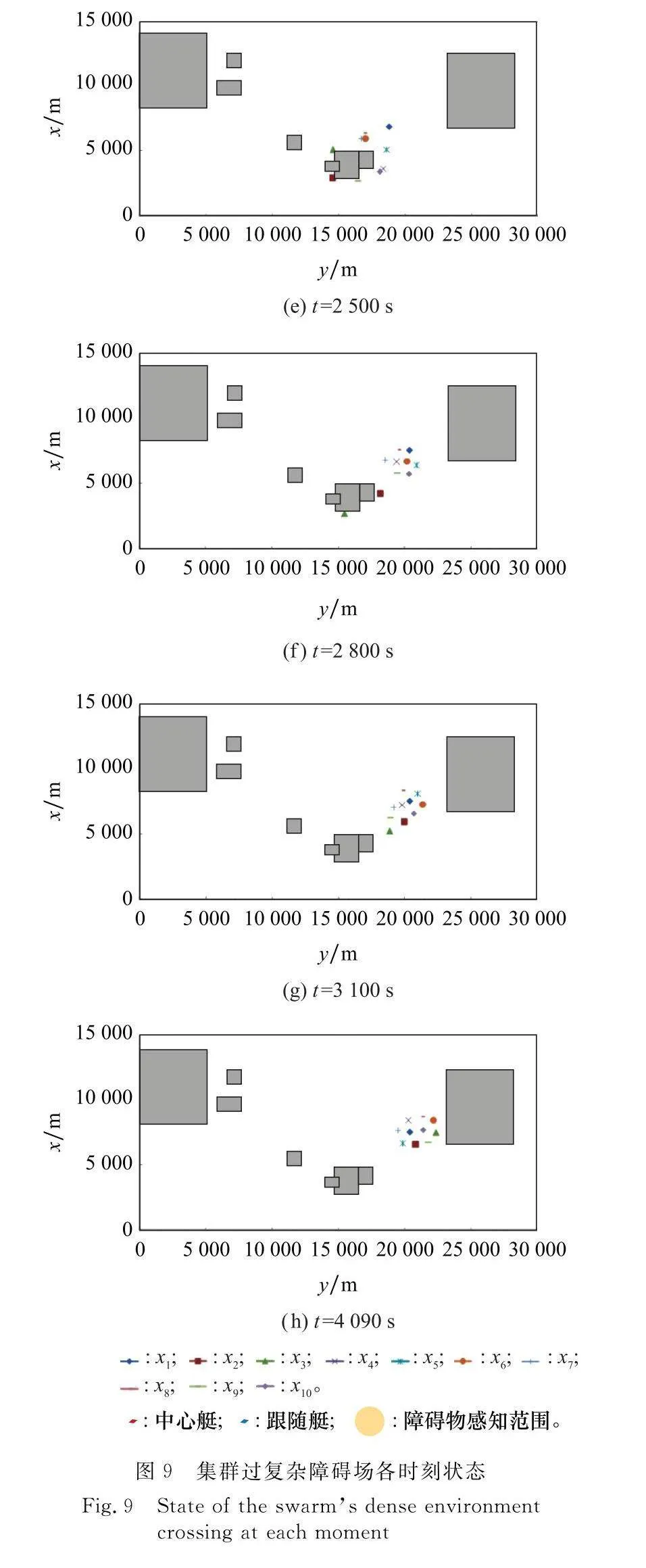
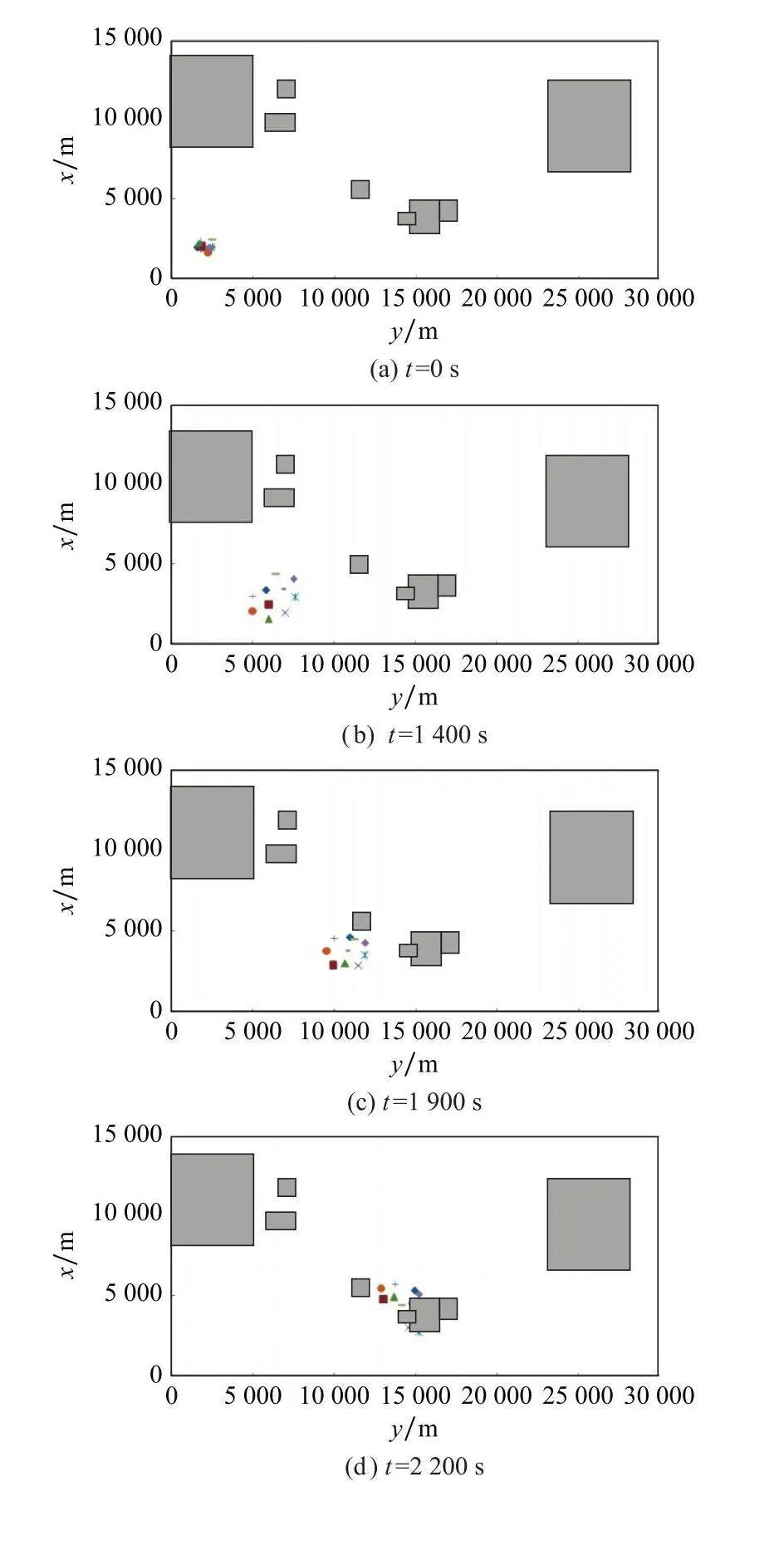
在集群过复杂障碍场任务的三阶段划分基础上,可将集群运动按时间划分为10个特定时刻,获取集群的运动状态切片,如图9所示。
通过对比分析可知,无人艇集群在1 400 s时刻组成固定队形,并向预定目标行进,在感知到复杂障碍场存在后,集群队形解体,调用细菌游走避障算法通过复杂障碍场(2 200 s、2 500 s、2 800 s);在集群通过复杂障碍场并且到达预定目标后,各艇于3 100 s时刻开始自组织生成稳定队形结构,并于4 090 s时刻完成新队形生成,准备接收后续行进任务。3个阶段的运行轨迹如图10所示。
通过对比分析可知,在组队行进阶段,集群能够保持固定的自组织队形(类似蜂巢造型)行进,行进过程中队形稳定,集群内各艇均能获得相对稳定的航速和航向。在集群内某艇感知到周边存在障碍物且无法保持队形通行时,调用细菌游走避障算法开始避障游走,中心艇向目标行进,其他追随艇向中心艇范围内游走,通过复杂障碍场过程无需人工干预即可自组织实施。当中心艇到达预定目标后,各艇自组织恢复队形结构。由图10(c)可知,队形恢复过程为以中心艇为中心自主微调,直至各艇均找到等距位置为止。由图10(d)可知,本文方法集群通过复杂障碍场方法的优点在于避障和通行过程无需人工干预即可完美执行,缺点是组队时间较长,各艇的两次组队过程在轨迹图中产生了两个以中心艇为中心的调整轨迹“圆圈”。
3.2 集群运动轨迹分析
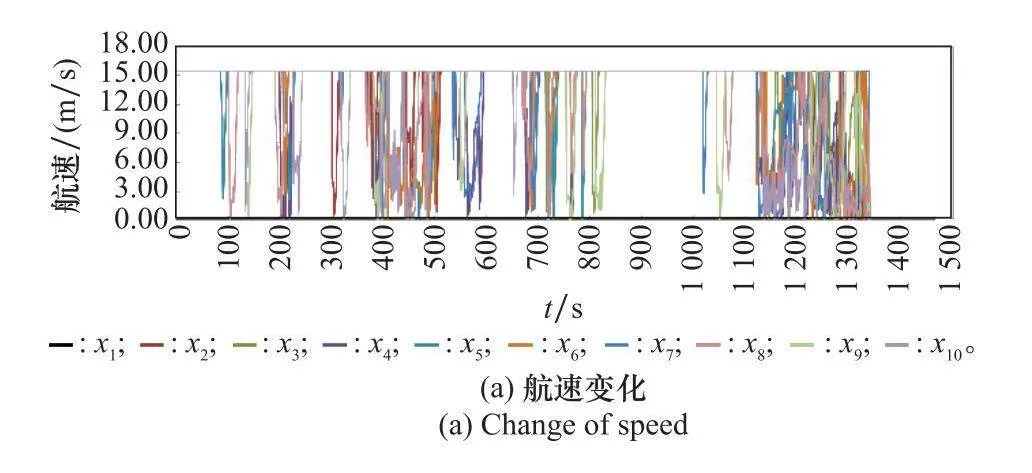
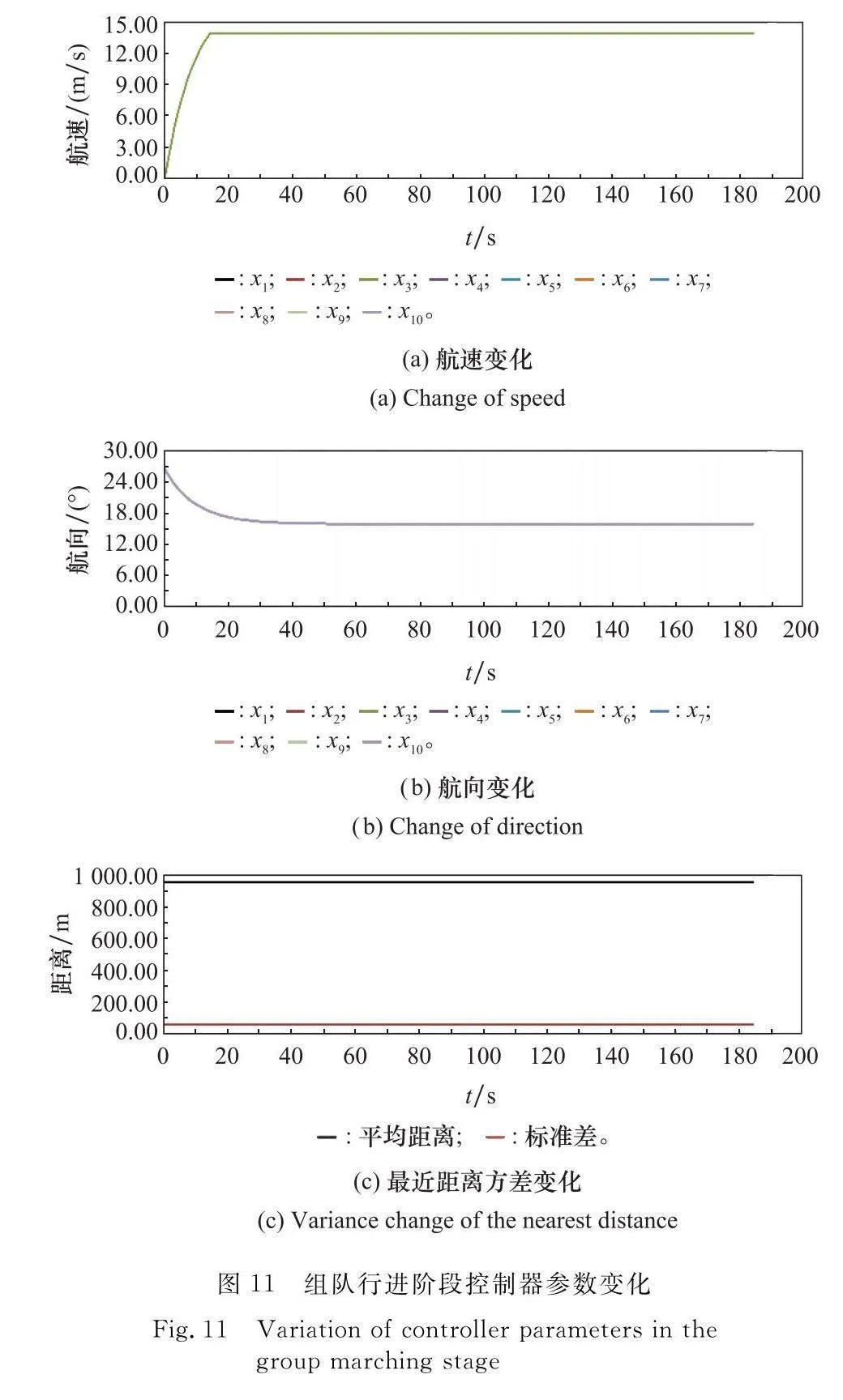
为了详细分析集群在各阶段控制器参数的变化情况,抽取各艇的实时航速、实时航向、无人艇间距标准差作为比较对象,对比分析结果如图11所示。
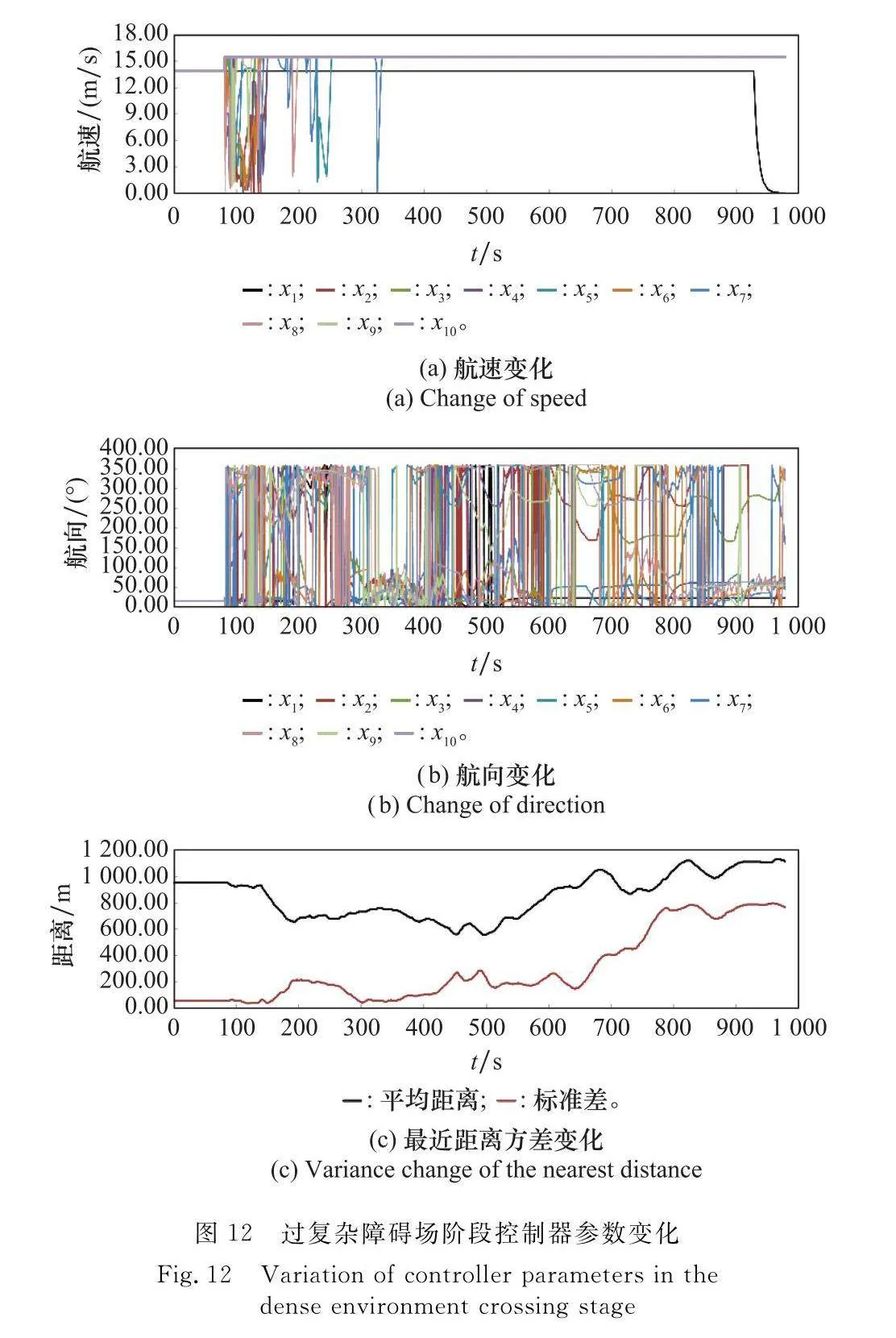
通过对比分析可知,在组队行进阶段,各艇航速逐步由0 m/s增加至规定航速,航向则根据中心艇赋予目标,进行统一微调,由27°调整为15.3°,各艇相对间距和距离标准差均维持稳定状态,证明队形呈现完美的稳态结构。在过复杂障碍场阶段,各艇航速、航向及相对距离方差变化如图12所示。
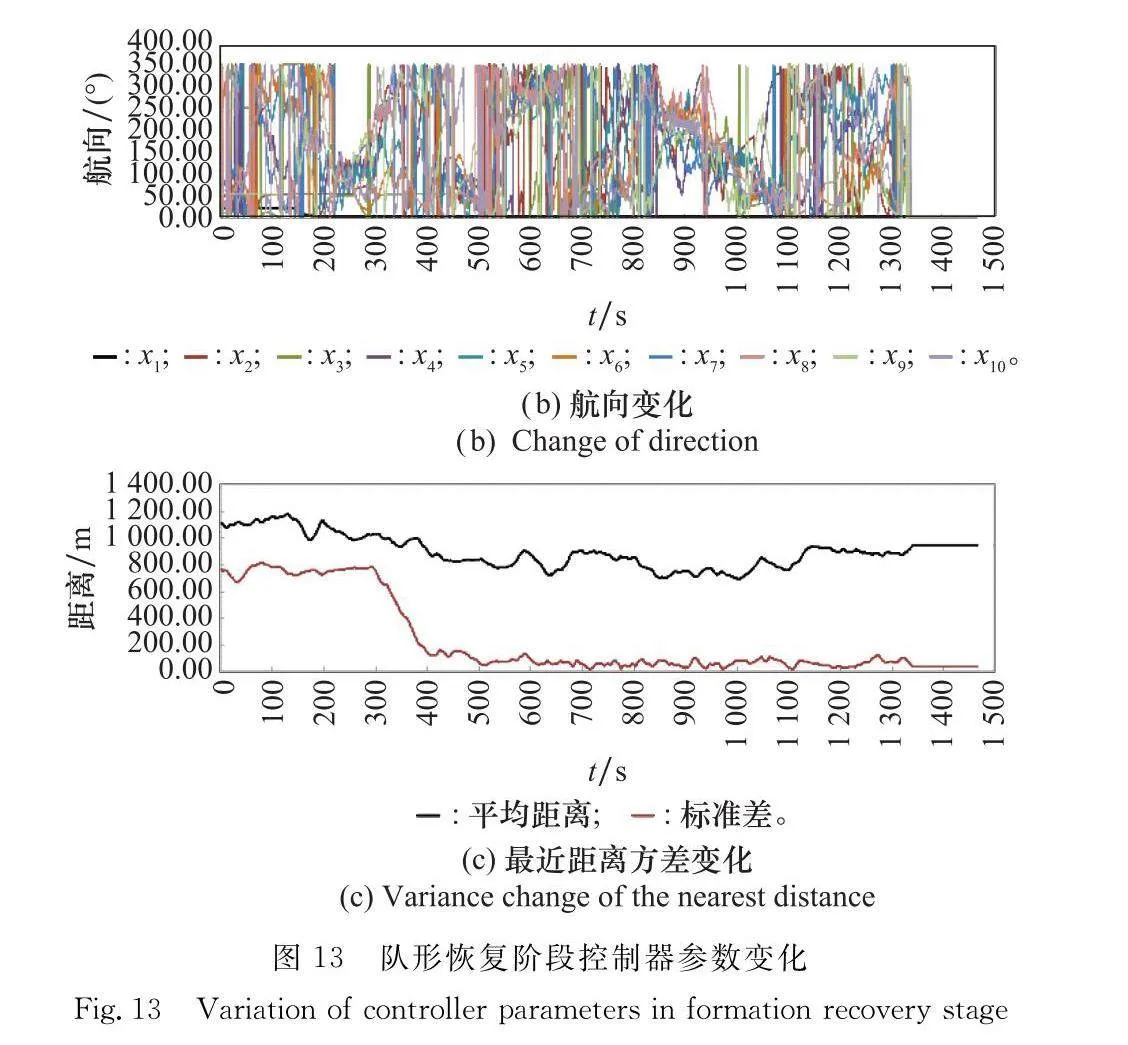
通过对比分析可知,当10号艇感知到障碍物存在后,队形的稳态结构被打破,中心艇的航速始终维持恒定、向目标避障行进,并在距目标100 m内逐步降速至0 m/s;其他追随艇视避障情况航速发生小幅剧烈变化(84~138 s),后续则在通过障碍过程中维持速度恒定;通过对各艇艏向进行分析,过复杂障碍场过程中各艇艏向变化剧烈,根据障碍局部特征实时调整艏向,并无具体规律可循。各艇的相对间距和距离标准差则随着通过复杂障碍场过程结束而逐步趋于统一(差值为50.92 m),表明有越来越多的艇通过复杂障碍场。在队形恢复阶段,各艇航速、航向及相对距离方差变化如图13所示。
通过对比分析可知,在队形恢复阶段,中心艇的航速趋向于0 m/s,其余追随艇则围绕中心艇寻找微调队形的最佳位置;经过1 301 s调整,队形结构趋于稳定(航速为0,艏向4.76°,最短间距945.16 m,距离标准差30.45 m),表明集群可执行下次组队行进任务。
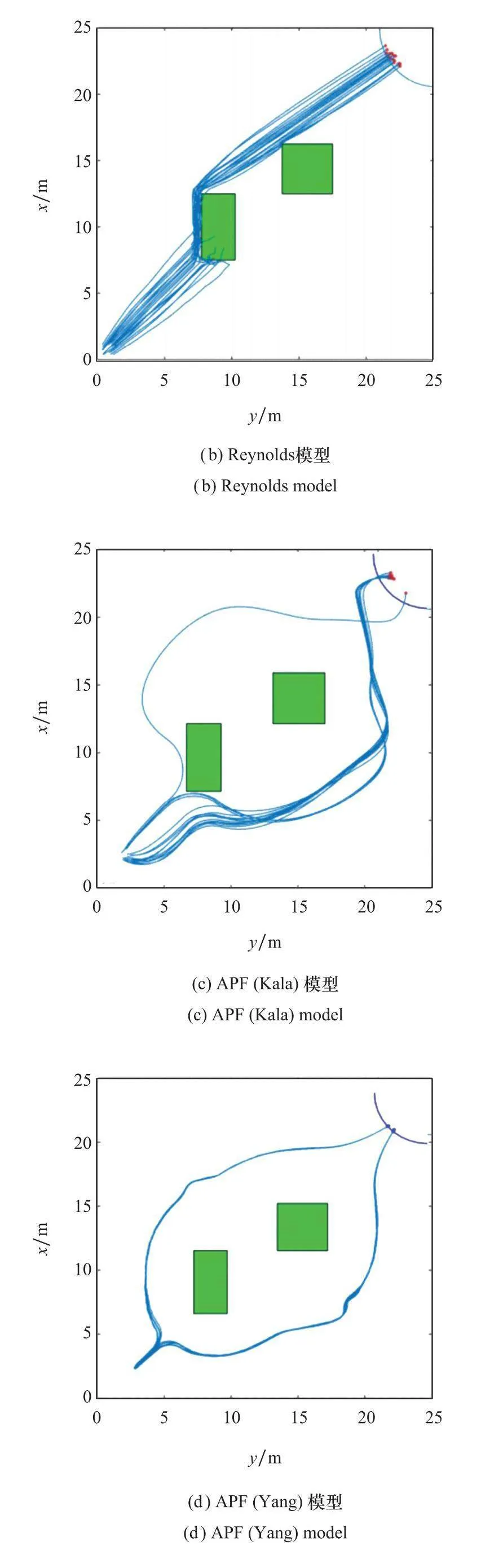
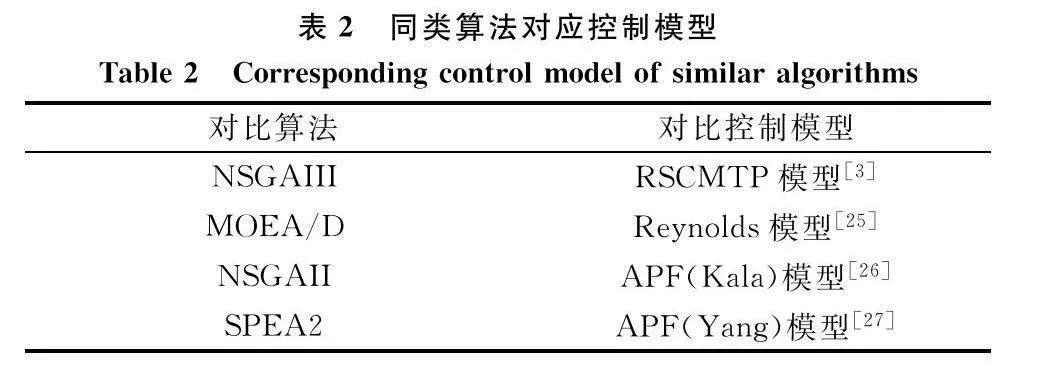
3.3 同类算法对比分析
仿真实验中涉及的模型、场景和算法与同类型算法的对应控制模型如表2所示。
通过对比分析可知,其他4类方法均用于无人机集群游走避障控制,因此避障轨迹相对较为平滑,避障路线执行效率相对较低。本文方法在避障过程中无需人工干预,避障动作流畅且效率更高。对比其他方法,本文方法能够通过自组织维持集群队形稳定,其他方法并无此设计。在算法设计上,本文方法原创的细菌游走避障算法和自组队形算法在执行效率和代码工作量上明显占优。
4 结束语
本文首先针对无人集群应用中存在的复杂障碍场通行问题,首先分析了同类算法研究中的不足,引入了无人艇的局部感知能力并赋予其自组队形和自主避障决策权,以提升通过复杂障碍场过程的生存率;其次,重点描述了三级控制器架构和自组队形算法、自主细菌游走避障算法的执行流程,给出了针对无人艇集群的算法步骤;再次,本文分析了无人艇集群通过复杂障碍场的执行流程,并与同类算法进行了比较,介绍了本文算法的存在价值和比较优势,通过仿真分析验证了本文算法的可行性和同类场景适用性。轨迹“圆圈”化的产生原因主要是中心艇到位之后保持静止,各追随艇围绕中心艇寻找最佳位置,由于各追随艇之间的相对位置并未固定,导致队形生成效率较低,追随艇只能频繁绕中心艇游走,进而产生“圆圈”轨迹。本文方法相比于人工势场类方法具有生成率高、自适应能力强、局部“抖动”规避的优点,但还存在较多有待进一步解决的问题,如组队时间不可控、队形生成效率低等, 在后续研究中应对上述问题加以重点解决。
参考文献
[1]张婷婷, 蓝羽石, 宋爱国. 无人集群系统自主协同技术综述[J]. 指挥与控制学报, 2021, 7(2): 127-136.
ZHANG T T, LAN Y S, SONG A G. An overview of autonomous collaboration technologies for unmanned swarm systems[J]. Journal of Command and Control, 2021, 7(2): 127-136.
[2]黄长强, 翁兴伟, 王勇, 等. 多无人机协同作战技术[M]. 北京: 国防工业出版社, 2012.
HUANG C Q, WENG X W, WANG Y, et al. Cooperative combat technology for multi-UAVs[M]. Beijing: National Defense Industry Press, 2012.
[3]王原, 邢立宁, 陈盈果, 等. 基于多目标优化的自组织无人机集群航迹规划方法[J]. 指挥与控制学报, 2021, 7(3): 257-268.
WANG Y, XING L N, CHEN Y G, et al. Path planning method of self-organizing UAV swarm based on multi-objective optimization[J]. Journal of Command and Control, 2021, 7(3): 257-268.
[4]贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43(1): 105-117.
JIA G W, WANG J F. Research review of UAV swarm mission planning method[J]. System Engineering and Electronics, 2021, 43(1): 105-117.
[5]REYNOLDS C W. Flocks, herds, and schools: a distributed behavioral model[J]. Computer Graphics, 1987, 21(4): 25-34.
[6]TONER J, TU Y. Flocks, herds, schools: a quantitative theory of flocking[J]. Physical Review E, 1998, 58(4): 4828-4832.
[7]COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218(1): 1023-1030.
[8]VICSEK T, CZIRÓK A, BEN-JACOB E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226-1235.
[9]张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42(1): 141-150.
ZHANG C S, WANG J, ZHANG L, et al. A multi-agent system flocking model with obstacle avoidance in complex obstacle field[J]. Acta Armamentarii, 2021, 42(1): 141-150.
[10]KWONG H, JACOB C. Evolutionary exploration of dynamic swarm behavior[C]∥Proc.of the IEEE Congress on Evolutionary Computation, 2003: 367-374.
[11]WANG L, SHI H, CHU T G. Flocking control of groups of mobile autonomous agents via local feedback[C]∥Proc.of the IEEE International Symposium on Intelligent Control, 2005: 441-446.
[12]CUCKER F, SMALE S. Emergent behavior in flocks[J]. IEEE Trans.on Automatic Control, 2007, 52(5): 852-862.
[13]CAVAGNA A, GIARDINA I, GRIGERA T S, et al. Silent flocks: constraints on signal propagation across biological groups[J]. Physical Review Letters, 2015, 114(21): 1278-1286.
[14]HEREFORD J, BLUM C. FlockOpt: a new swarm optimization algorithm based on collective behavior of starlingbirds[C]∥Proc.of the 3rd World Congress on Nature and Biologically Inspired Computing, 2011: 17-22.
[15]KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98.
[16]FIORINI P, SHILLER Z. Motion planning in dynamic environments using velocity obstacles[J]. International Journal of Robotics Research, 1998, 17(7): 760-772.
[17]SANTOS V, CAMPOS M, CHAIMOWICZ L. On segregative behaviors using flocking and velocity obstacles[J]. Springer Tracts in Advanced Robotics, 2014, 104(3): 121-133.
[18]WOODS A, LA H. Dynamic target tracking and obstacle avoidance using a drone[C]∥Proc.of the International Symposium on Visual Computing: Advances in Visual Computing, 2015: 857-866.
[19]HARDER S. Formation specification for control of active agents using artificial potential fields[J]. Journal of Intelligent amp; Robotic Systems, 2019, 95(2): 279-290.
[20]郭褚冰, 张锴, 张永平. 基于生物智能的无人集群协同控制[J]. 指挥与控制学报, 2021, 7(1): 76-82.
GUO C B, ZHANG K, ZHANG Y P. Unmanned swarm coope-rative control based on biological intelligence[J]. Journal of Command and Control, 2021, 7(1): 76-82.
[21]MITCHELL M. An introduction to genetic algorithms[J]. Principles of Adaptive Filters and Self-learning Systems, 1998, 24(4): 325-336.
[22]KENNEDY J, EBERHART R. Particle swarm optimization[C]∥Proc.of IEEE International Conference on Neural Networks, 1995: 1942-1948.
[23]DORIGO M. Optimization, learning and natural algorithms[D]. Milano: Politecnico di Milano, 1992.
[24]谢榕, 顾村锋. 一种欧椋鸟群协同算法[J]. 武汉大学学报(理学版), 2019, 65(3): 229-237.
XIE R, GU C F. A starling swarm coordination algorithm[J]. Journal of Wuhan University (Science Edition), 2019, 65(3): 229-237.
[25]REYNOLDS C. Flocks, herds and schools: a distributed behavioral model[J]. ACM Siggraph Computer Graphics, 1987, 21(4): 25-34.
[26]KALA R. Code for robot path planning using artificial potential fields[EB/OL].[2022-10-26]. http:∥rkala.in/codes.html.
[27]YANG Y, LIU M Y, CUI H Y, et al. Research on formation behavior off lock with visual guidance algorithm[C]∥Proc.of the IEEE International Conference on Robotics and Biomimetics, 2018: 2360-2365.
作者简介
刘 昊(1983—),男,高级工程师,博士,主要研究方向为群体智能、集群控制。
张云飞(1984—),男,高级工程师,博士,主要研究方向为智能科技。
赵继成(1989—),男,高级工程师,硕士,主要研究方向为无人艇控制算法、集群算法。
