
变形翼无人机纵向动力学建模及飞行力学特性分析
2024-11-02 00:00:00邵朋院张治国屈高敏谭健张西
郑州航空工业管理学院学报 2024年4期











摘 要:文章建立了变形翼无人机(Morphing Wing UAV, MWUAV)的纵向动力学模型并在此基础上对其飞行力学特性进行了简要分析。首先,针对MWUAV的参数变化特点,建立纵向非线性参数变化(Nonlinear Parameter-Vayring, NPV)模型;其次,分析了参数变化对其静态特性的影响,包括升阻特性、转动惯量特性以及飞行包线的影响;最后,在建立模型和静态特性分析的基础上,在其飞行包线内选择典型分析点,进行了配平和线性化分析,得出了其配平量随参数变化的关系,并计算了其纵向长短周期模态特性。建模和分析结果可以为MWUAV的飞行状态设计以及控制器设计提供设计依据。
关键词:变形翼无人机;纵向动力学;飞行力学;飞行包线;动稳定性
中图分类号:V249;V279" 文献标识码:A" 文章编号:1007 - 9734 (2024) 04 - 0021 - 08
0 引 言
随着无人机技术的发展,无人机在各种军民用场合得到越来越多的应用,例如,航拍、搜救、侦察、物流运输和军事打击等[1-6]。在大部分应用场景均使用特定功能的无人机,但是在某些场景下需要无人机具备多种功能才能够满足任务需求,例如捕食者和翼龙一类的察打一体无人机[7],需要无人机同时具备侦察和打击功能。不同的任务功能对于无人机性能要求是不同的,例如侦察任务需要无人机具有较长的续航时间和较高的飞行高度,即高空长航时无人机[8];而攻击任务通常需要无人机具有较高的飞行速度和机动性[9]。飞机的气动外形对飞机的性能起决定性作用,例如高空长航时无人机多采用大展弦比,使其具有较高的升阻比,适合于执行低速巡航侦察任务;小展弦飞机虽然升阻比较低,但是和大展弦比飞机相比,其高速机动飞行能力较强,适合于执行攻击任务。
受自然界鸟类启发,变形翼无人机(MWUAV)可以在飞行中改变机翼形状,从而具备不同的飞行性能,可以适应不同的任务需求。所以变形翼无人机的概念一经提出,就成为航空界的研究热点[10-13]。但是,经过数十年的研究,目前在航空工程界还没有出现实用的变形翼无人机型号。阻碍变形翼无人机实现的难点存在于材料、气动、机械结构、动力学和飞行控制等多方面[14]。其中,动力学与控制是亟待解决的关键问题[15]。变形翼无人机在机翼变形过程中带来的非线性、非定常气动力以及参数变化等,这些都给建模和控制带来极大挑战[16]。当前的变形翼无人机建模及动力学分析多针对其飞行动力学特性的某些方面,比如非定常气动特性分析[17]、多体动力学和稳定性[18]等。而全面的动力学建模和特性分析对于变形翼无人机的控制和设计评价具有重要意义。
1 MWUAV的纵向动力学建模
1.1" MWUAV模型概述
本文中研究的变形翼无人机(MWUAV)样机如图1所示。其机翼分为内外两段,在变形过程中外段机翼保持水平(上反角不变),而内段机翼可以绕着与机身连接的关节轴从0 °(图1中左图)到120 °(图1中右图)连续变形。该无人机设计实现了侦察和打击一体化(察打一体)。
该变形翼无人机的机翼折叠角可以在飞行中从0°到120°连续变化,变形速率设置为20°/s,长短机翼构型之间的转换时间为6秒。
1.2" 纵向非线性动力学模型
1.2.1准定常假设
MWUAV在变形过程中存在非定常气动力, 而非定常气动力难以准确建模[19],通过作者之前的研究[20]发现,对于本文所研究的MWUAV,在变形机翼以20°/s的变形速率恒定变形的情况下,非定常气动力对于升力的影响和准定常假设计算结果之间的误差不超过10%,在气动数据的工程允许误差范围内。所以本文假设机翼折叠或展开的变形速率均为20°/s的恒定速率,在此假设下,在机翼变形过程中,可以忽略由于变形引起的非定常气动力,即变形过程中在某时刻的气动力和力矩与处于该形状的定常构型气动力和力矩是一致的。
1.2.2纵向非线性参数变化模型
变形翼无人机的纵向非线性动力学数学模型如式(1)所示[21]:
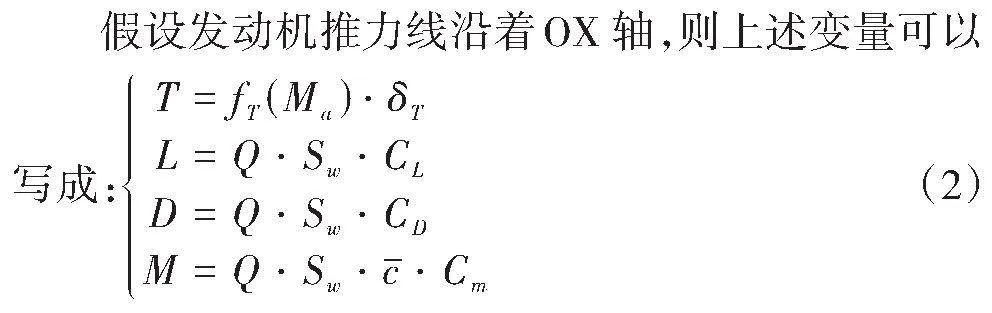
其中,a表示飞机迎角;V为空速;q 和 q 分别表示俯仰角速率和俯仰角;Iyy 是绕机体OY 轴的转动惯量;m表示飞机质量;g表示当地重力加速度;M 是俯仰力矩;T、L 和 D分别表示发动机推力、升力和阻力。
气动系数CL,、CD 和 Cm 可以由CFD计算得到的气动数据库插值得到。记气动数据插值函数关系为:
[C*=f*(v1,v2,...)] (3)
可以采用多项式拟合得到:
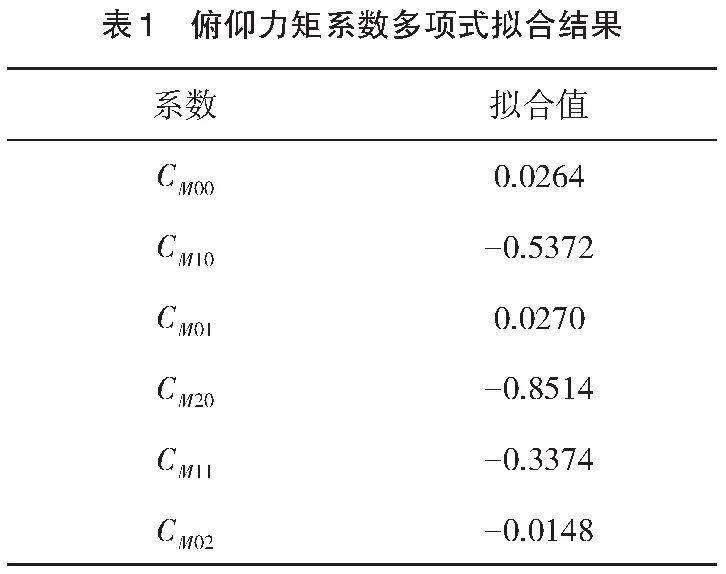
[CM0(α,θr)=CM00+CM10α+CM01θr+CM20α2+CM11αθ+CM02θ2r] (4)
其中,拟合系数如表1所示。
同理可以得到升力系数的拟合多项式为:
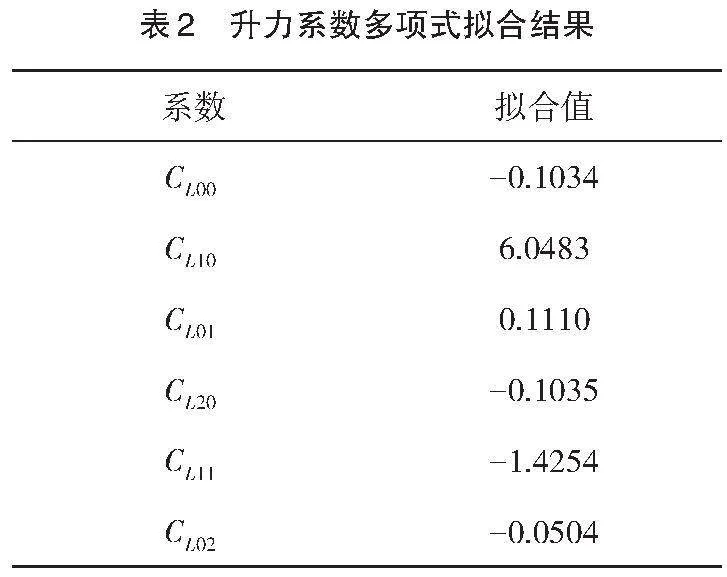
[CL0(α,θr)=CL00+CL10α+CL01θr+CL20α2+CL11αθ+CL02θ2r] (5)
其中,拟合系数如表2所示。
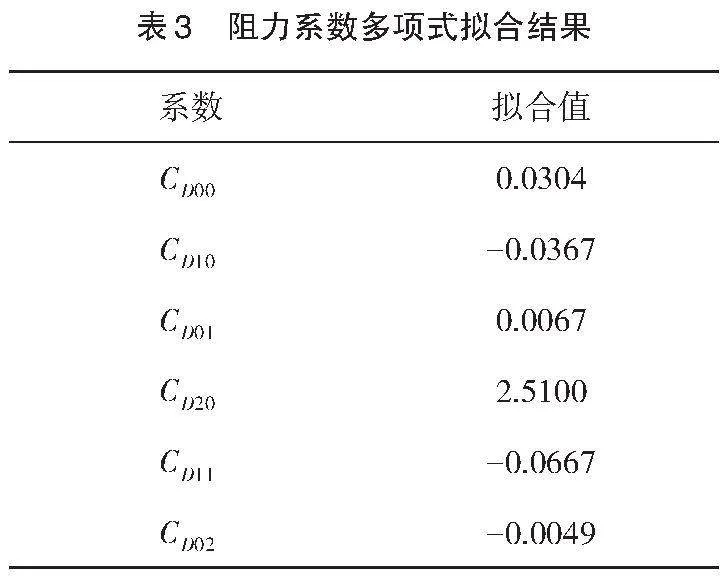
阻力系数的拟合多项式为:
[CD0(α,θr)=CD00+CD10α+CD01θr+CD20α2+CD11αθ+CD02θ2r] (6)
其中,拟合系数如表3所示。
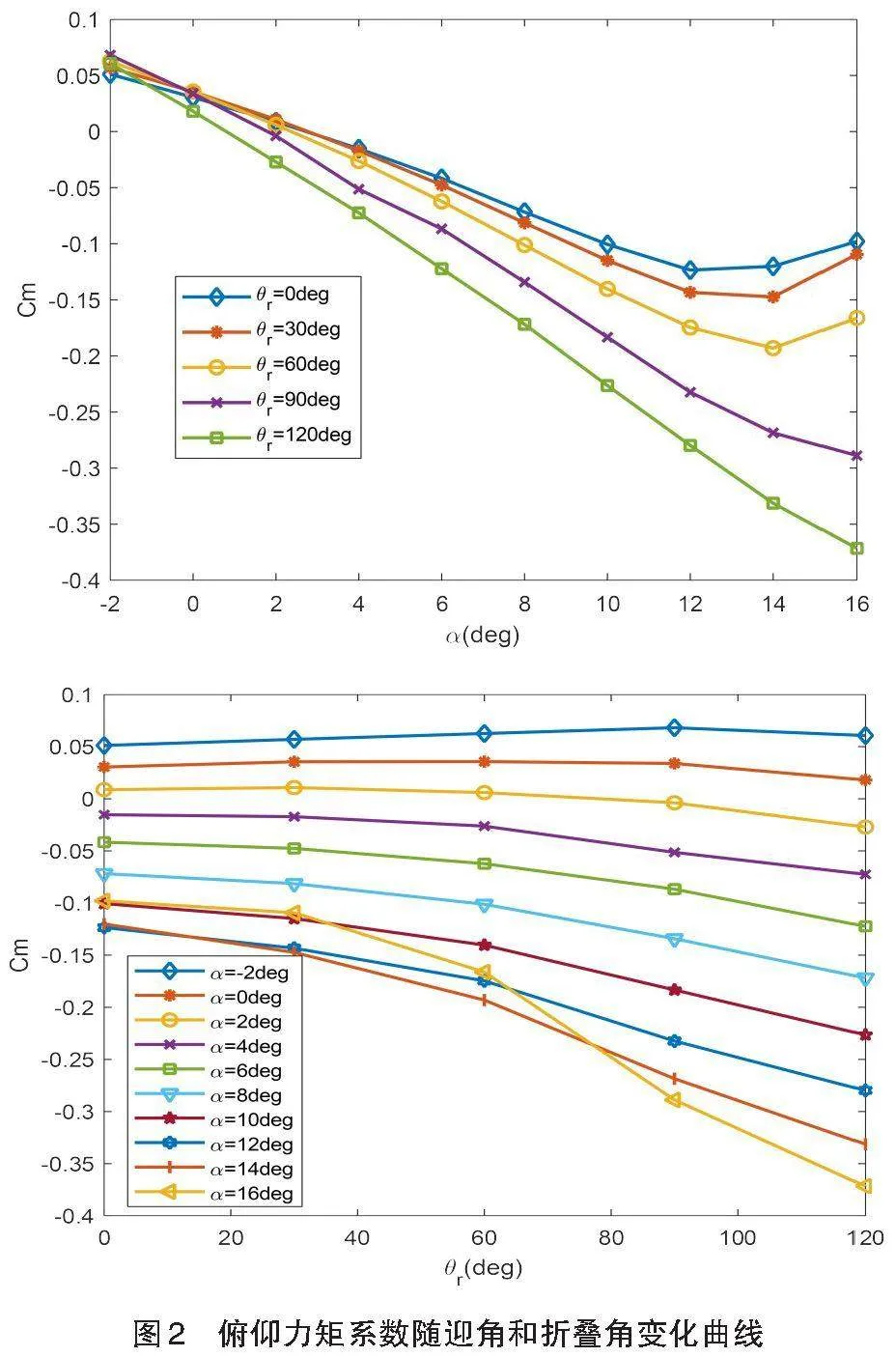
这三个系数都和迎角及机翼折叠角有关,CM还和q及升降舵偏角de有关。所以有:
考虑到一般飞机的俯仰力矩与俯仰角速率和升降舵偏度近似成线性关系,所以有:
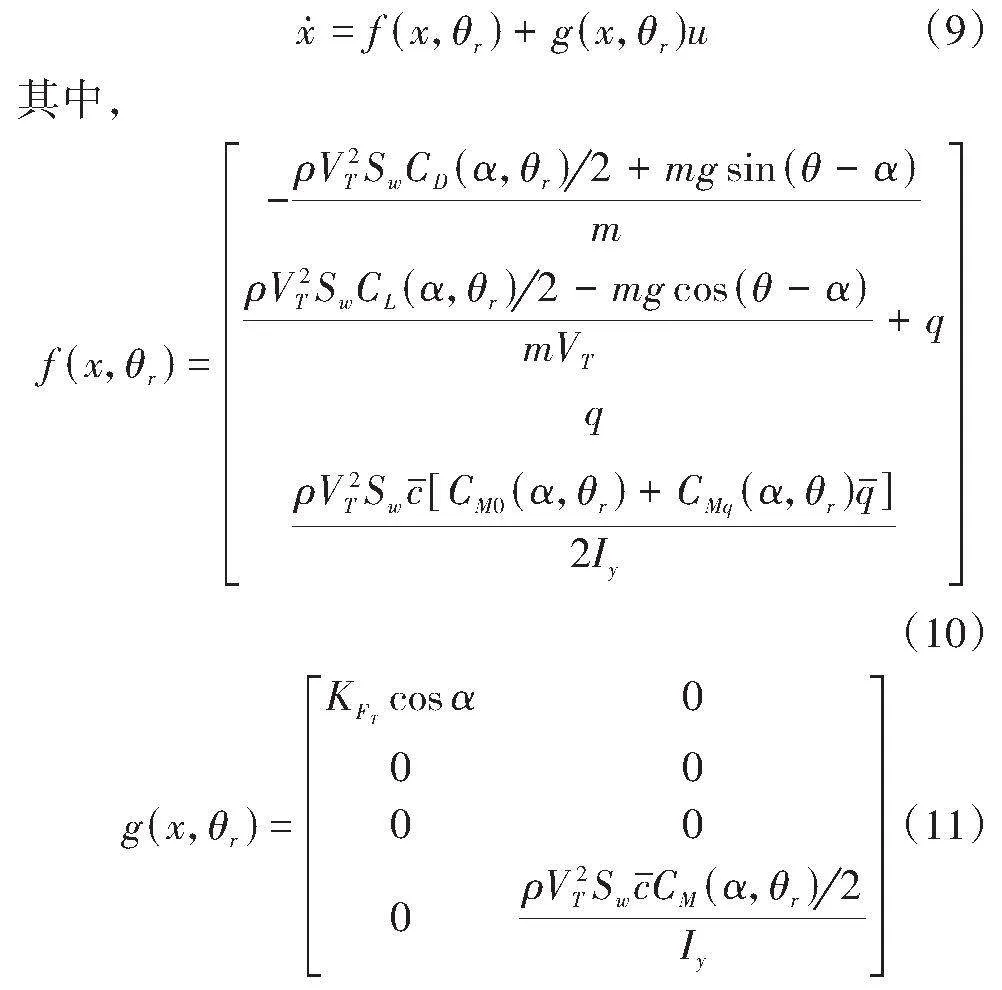
联立式(1)到式(8),即可得到系统的纵向非线性模型。选取系统状态变量为:x=[V,a,q,q]T,系统输入为:u=[dT,de]T。式(1)—式(8)可以写成状态空间形式:
可以看出,式(9)是一个非线性参数变化系统。
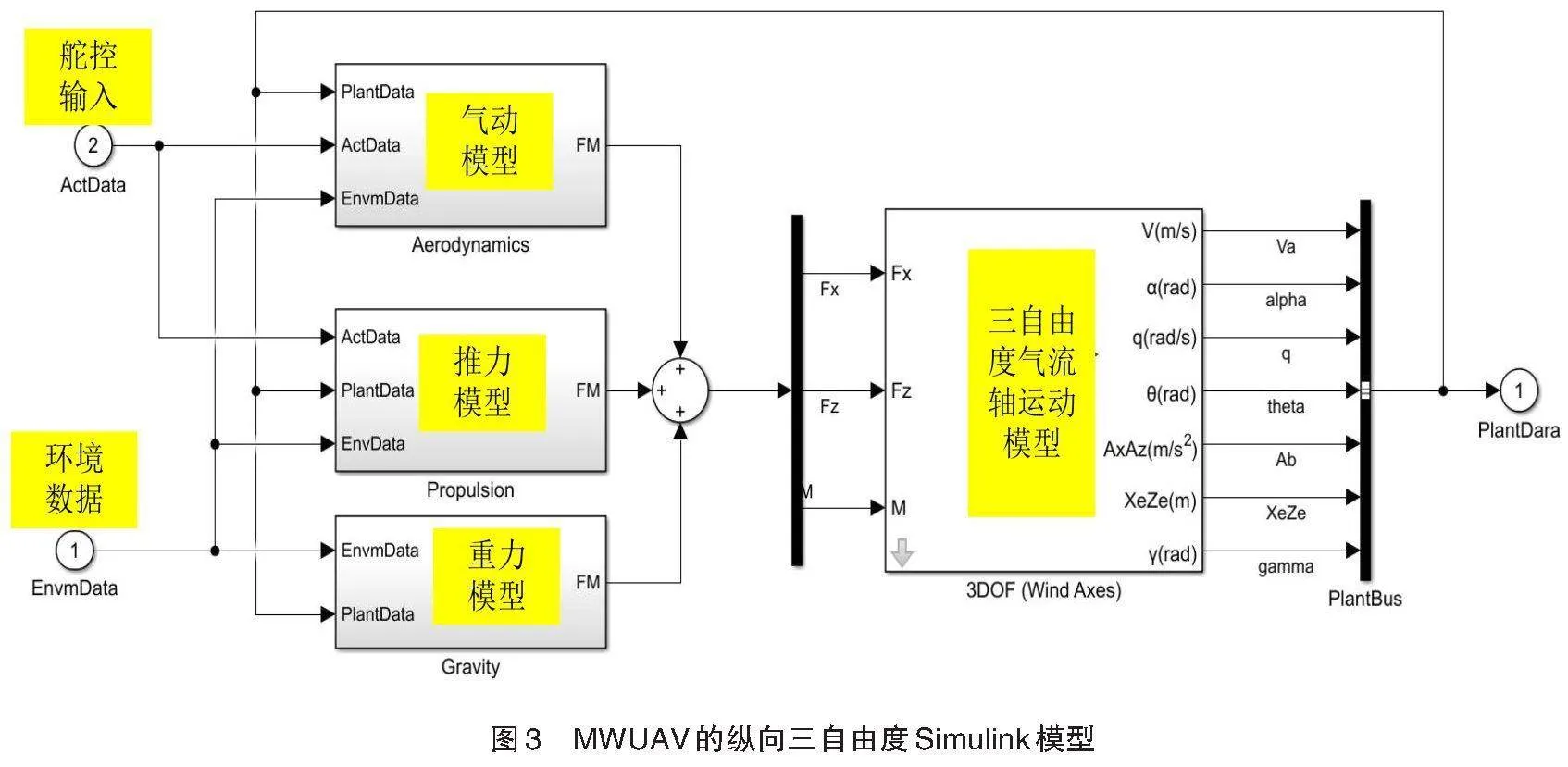
由式(1)—式(11)在Simulink下建立MWUAV的数字仿真模型,模型结构如图3所示。
在该模型实现时将折叠角作为输入来处理。
2 MWUAV的参数变化静态特性分析
在机翼折叠角变化过程中,MWUAV的外形会发生变化,从而引起众多参数的变化,包括:转动惯量、升阻特性及飞行速度等。本节将对折叠角变化引起的这些静态特性变化进行分析,即先不考虑飞机运动的动态过程。
2.1" 转动惯量变化特性分析
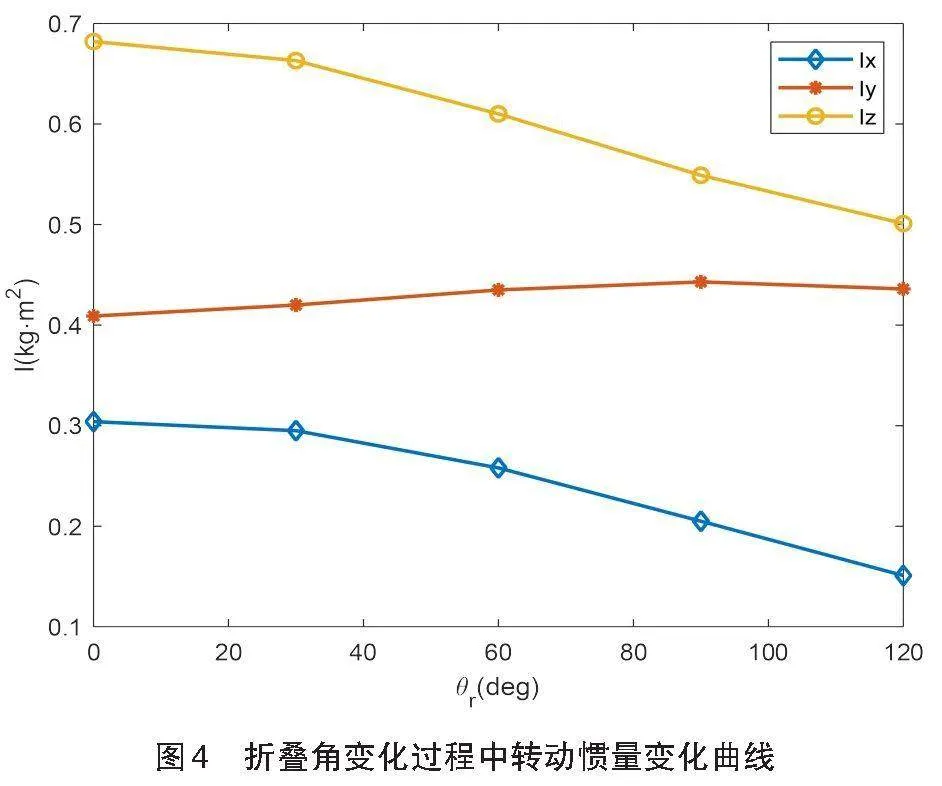
从定性分析可知,当折叠角增大时,飞机的质量在绕机体轴X轴和Z轴方向更向重心方向集中,而Y轴方向变化不大。根据测量的转动惯量数据,对三轴的转动惯量随折叠角变化曲线绘图如图4所示。
图 4中的变化趋势和定性分析一致,由此可知折叠角变化造成的转动变量变化对横航向影响较大,对纵航向影响较小。由于横航向的转动惯量都在减小,因此其机动性将增强。
2.2" 升阻特性分析
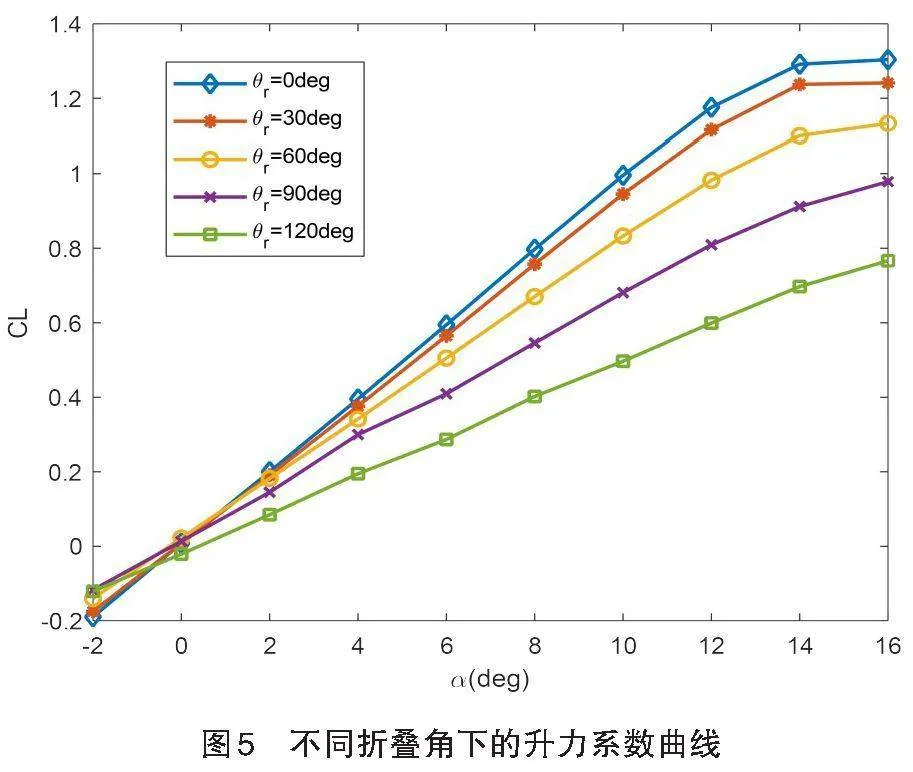
随着机翼折叠,其展弦比逐渐变小,升力系数逐渐降低。不同折叠角下的升力系数曲线如图5所示。
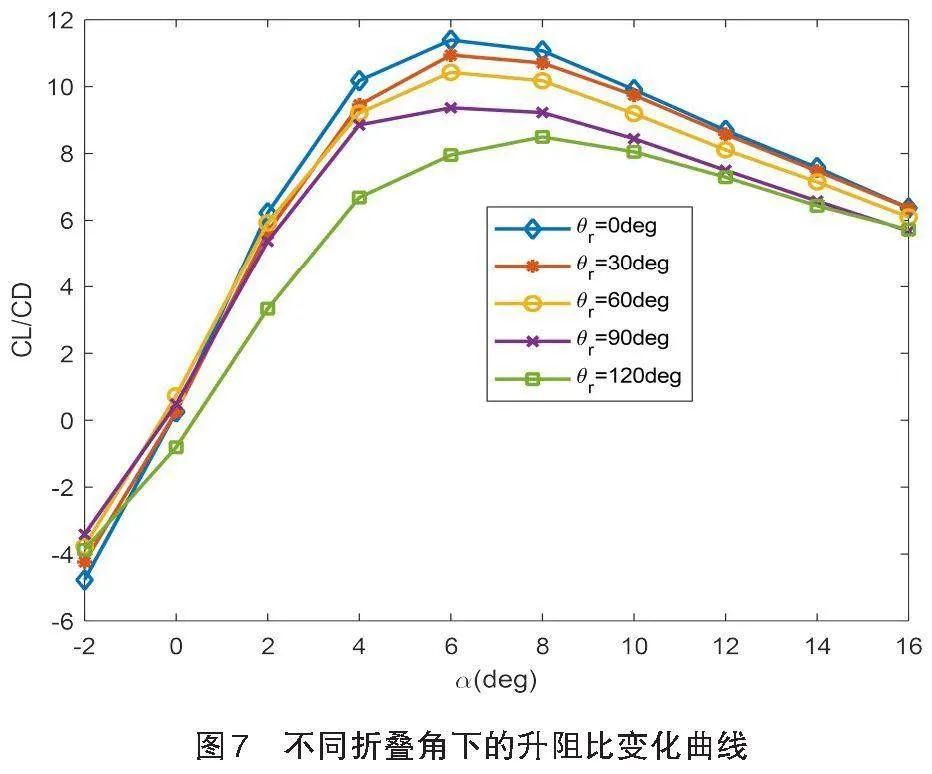
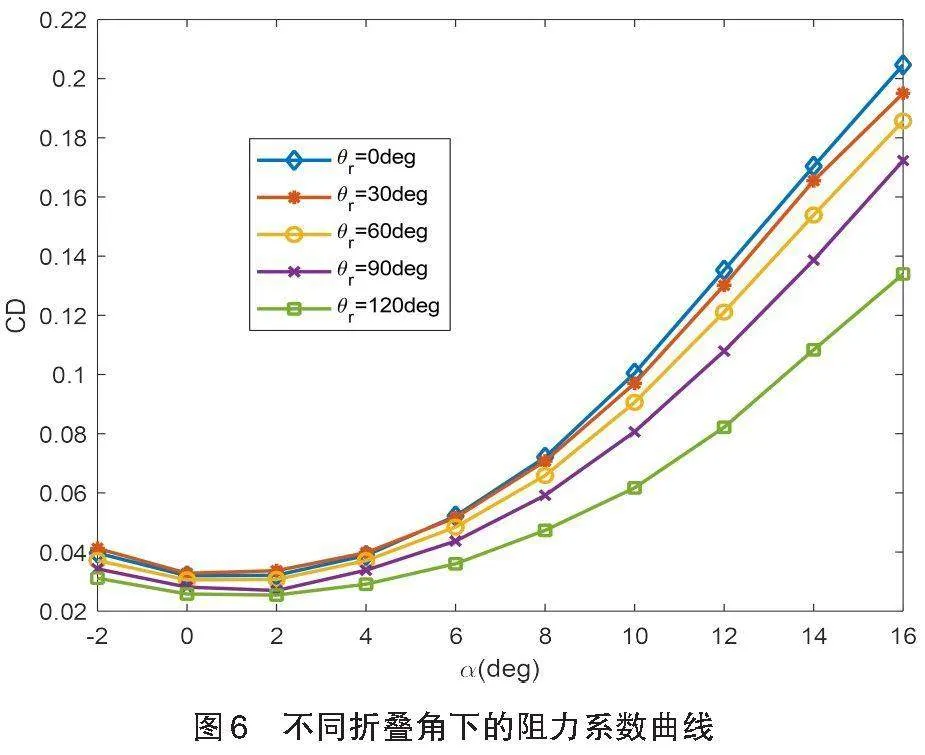
随着折叠角的增大,升力系数逐渐降低,阻力系数也逐渐降低,如图6所示。升阻比逐渐降低,如图7所示。由图7可以看出,随着折叠角的增加,飞机展弦比逐渐降低,升阻比减小,最大升阻比从0°折叠角的11.39减小到8.4。
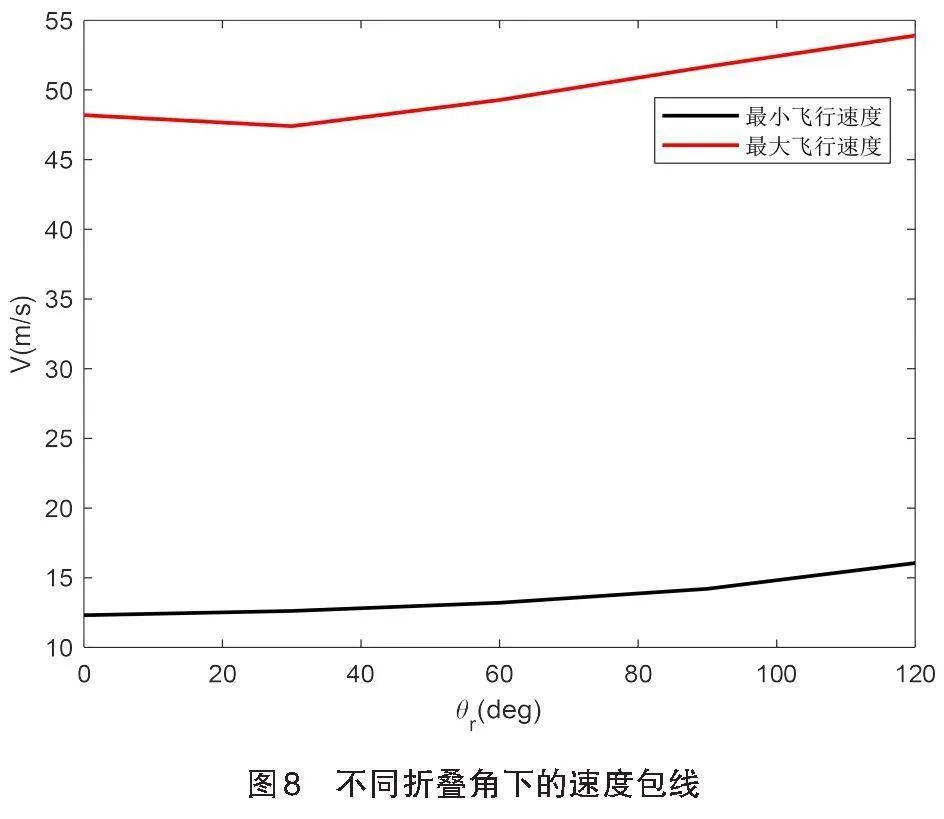
2.3" 飞行包线
由于该MWUAV主要用于原理验证,所以飞行高度范围变化不大,实际飞行高度在离地1000米以下,所以在飞行包线计算时不考虑高度影响,主要考虑机翼折叠对于飞行速度的影响。
计算飞行状态按照给定飞行高度海拔500米定高平飞,则失速速度为:
其中,[G=mg]为飞机在500米高度时的重力;[Sw]为机翼参考面积;[ρ]为500米海拔高度对应的空气密度;[CLmax]为最大升力系数(即失速迎角处对应的升力系数);最小飞行速度取一定安全余量,按照[Vmin=1.2Vs]飞行。
最大飞行速度按照发动机最大油门平飞,因为以最大速度平飞时迎角较小,忽略平飞迎角和发动机安装角影响,由平飞时轴向力平衡有:
由平飞时纵向力平衡有:
将式(14)和式(13)作比,有:
因此可以得到以最大速度平飞时所需要的升阻比,再根据2.2小节的升阻比计算结果,通过查表得到最大速度平飞时的迎角,以及阻力系数和升力系数,代入式(13)可以计算得到最大飞行速度。
计算得到的最大和最小飞行速度如表3所示。
速度飞行包线如图8所示。从图8可以看出,随着机翼折叠,飞机的最小飞行速度和最大飞行速度都有所增加。说明短机翼构型比长机翼构型更适合于高速飞行。
3 配平及线性化分析
3.1" 配平分析
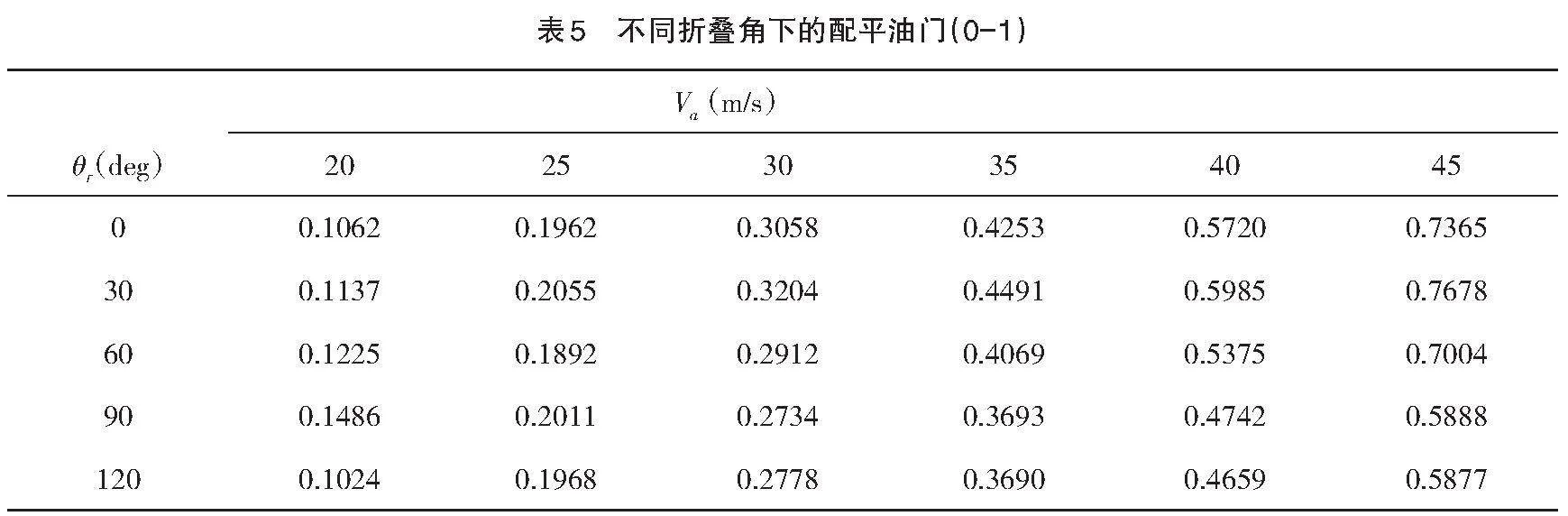
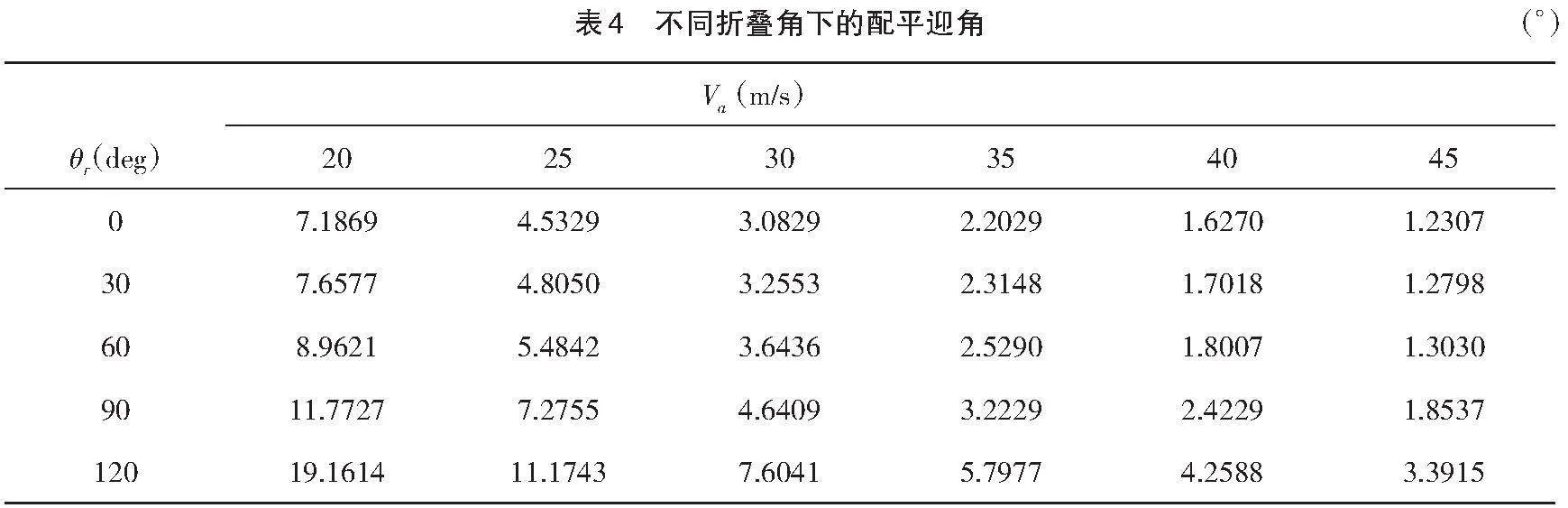
取典型飞行高度为海拔500米,按照图7所示,飞行包线选取分析点速度为Va=[20,25,30,35,40,45]m/s,每个速度下取机翼折叠角为qr=[0,30,60,90,120]deg。进行配平分析,由受力平衡有:
由式(7)和式(16)可以得到配平迎角和油门值,如表4和表5所示。
从表4可以看出,折叠角的增大,导致机翼升力系数下降,配平迎角逐渐增大。在同一折叠角下,随着速度增大,配平迎角逐渐减小。在短机翼构型低速飞行情况下,配平迎角超过19°,进入大迎角非线性区域,证明短机翼构型不适合进行低速飞行。
由表5可以看出,在小空速(20m/s~25m/s)下,折叠角对配平油门影响不大,但在空速增大后(大于30m/s),随着折叠角增大,配平油门有所降低,这是因为小展弦比的飞行阻力更小,所以也可以由此得出结论。
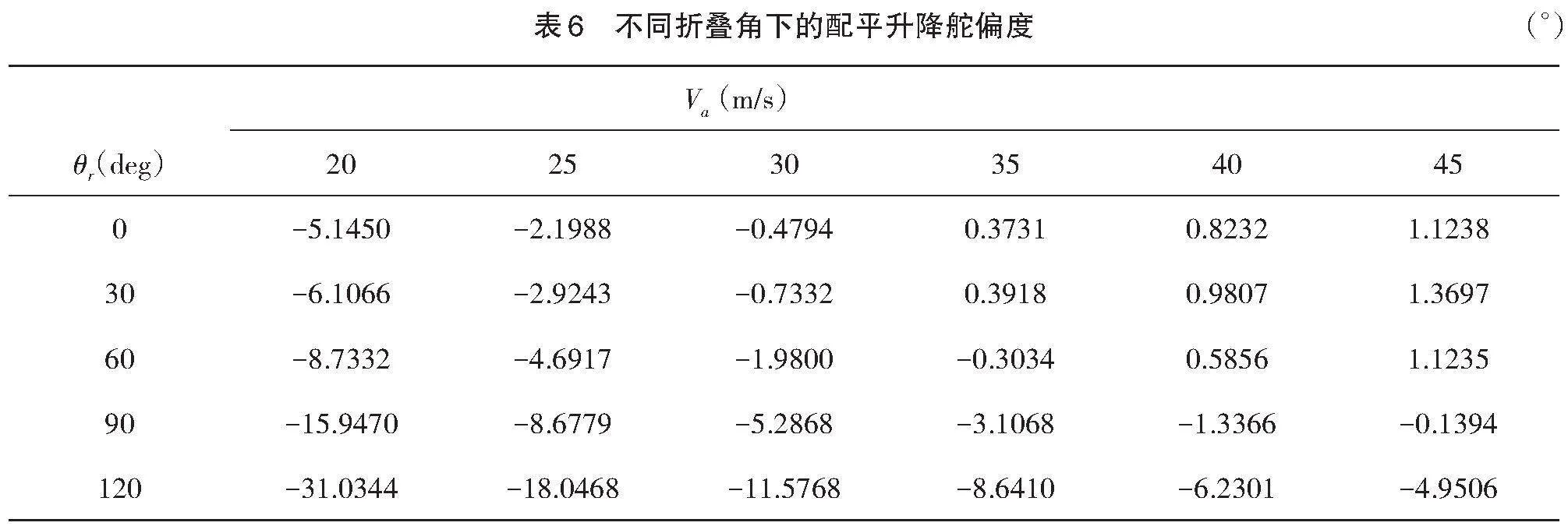
由力矩平衡有:
可以求解出来配平升降舵偏度。求解结果如表6所示。
从表6可知,随着折叠角增大,所需的配平升降舵上偏(负值方向)逐渐增大,在短机翼小空速(120°,20m/s)情况下出现配平升降舵超限,证明该运行点在实际中不可用,在设计运行包线时应该避开该点。
3.2" 线性化分析
给定空速和折叠角,在3.1小节所示的配平点处进行线性化,即令式(9)中
可以得到配平值,配平点的状态记为[x0],输入记为[u0]。状态增量为:
在平衡点附近进行小扰动线性化,有:
其中,
式(21)中迎角α按照表 4中的配平迎角即可。
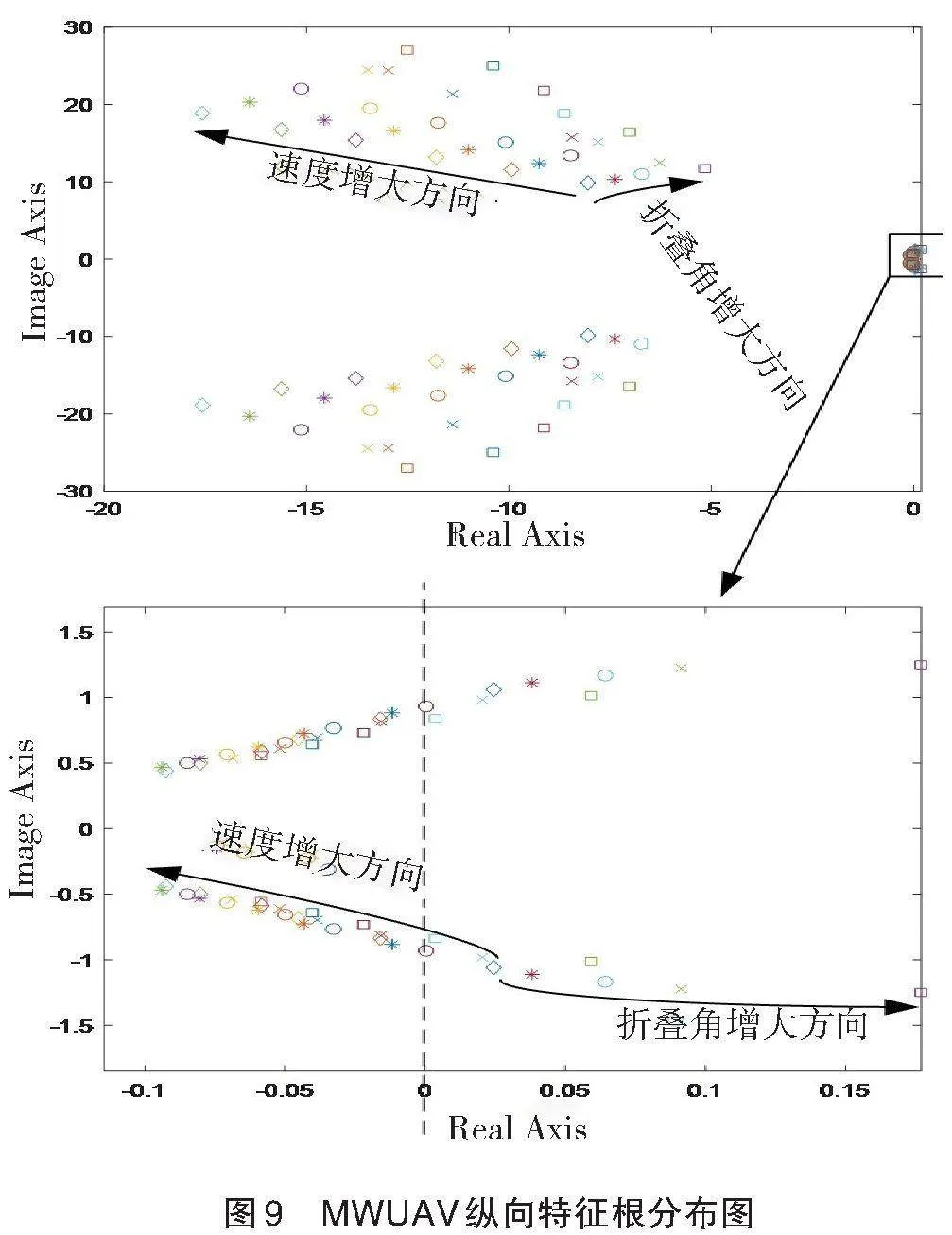
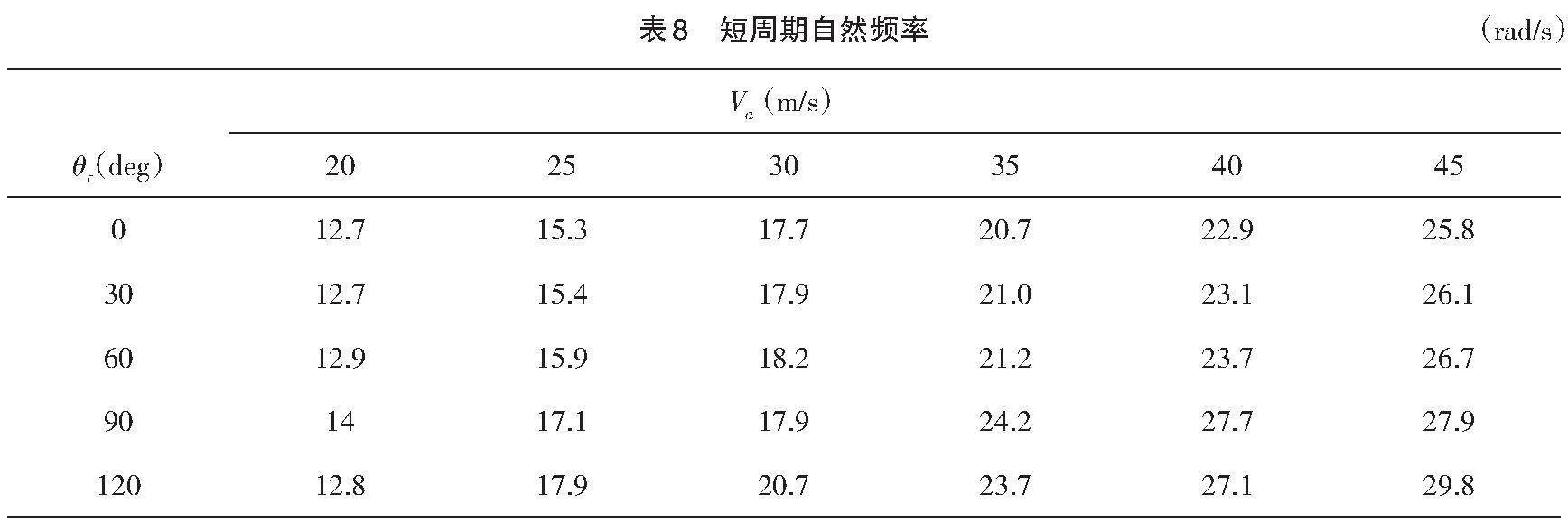
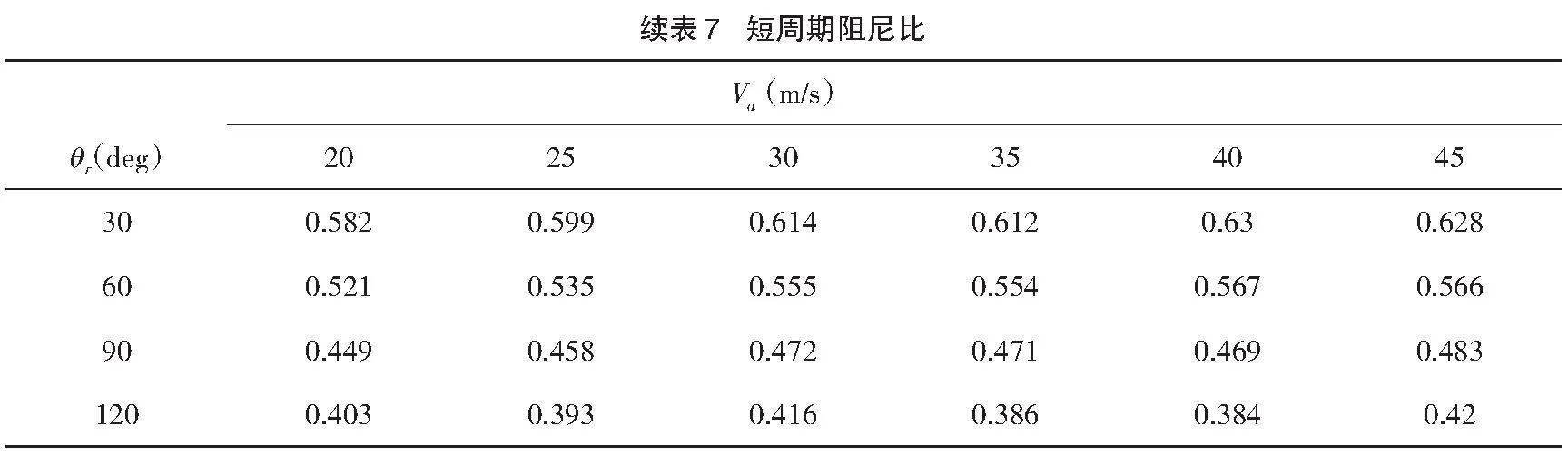
各个分析点对应的线性系统特征根分布如图9所示。由图9中上图可以看出短周期特征根在分析点覆盖范围内一直保持稳定,总体趋势是随着速度增加,短周期自然频率在逐渐增加,阻尼比也在逐渐增加,但是速度对短周期自然频率的影响大于短周期阻尼比的影响;随着折叠角增大,自然频率在增加,阻尼比稍有减小。
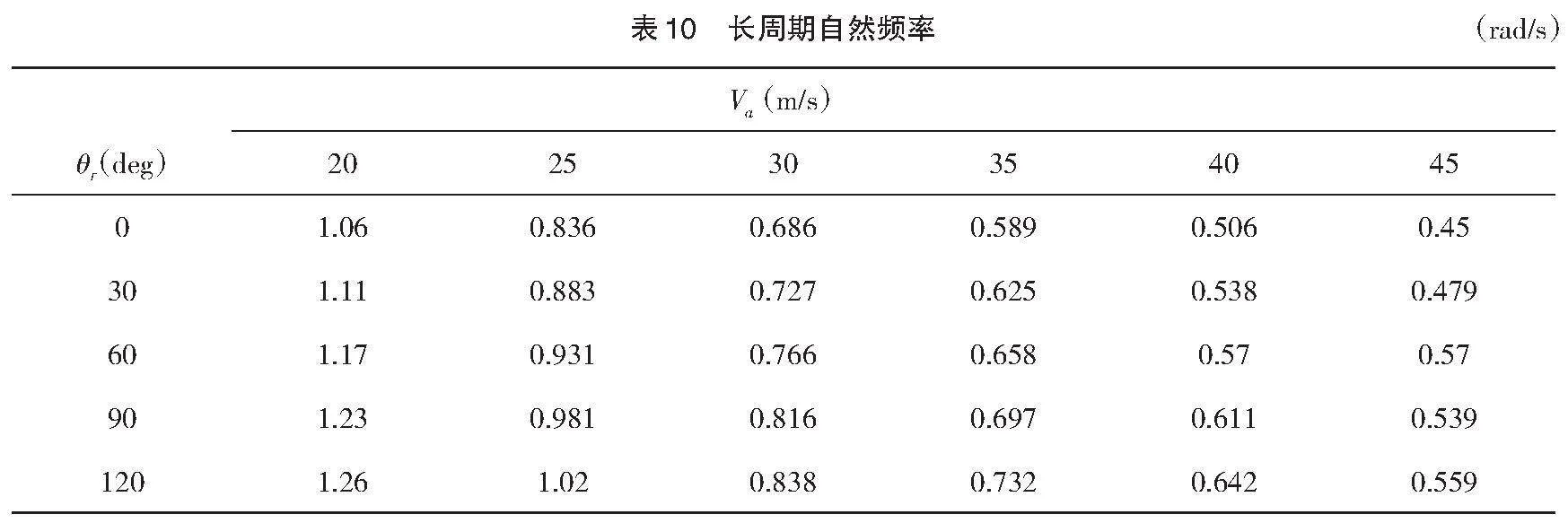
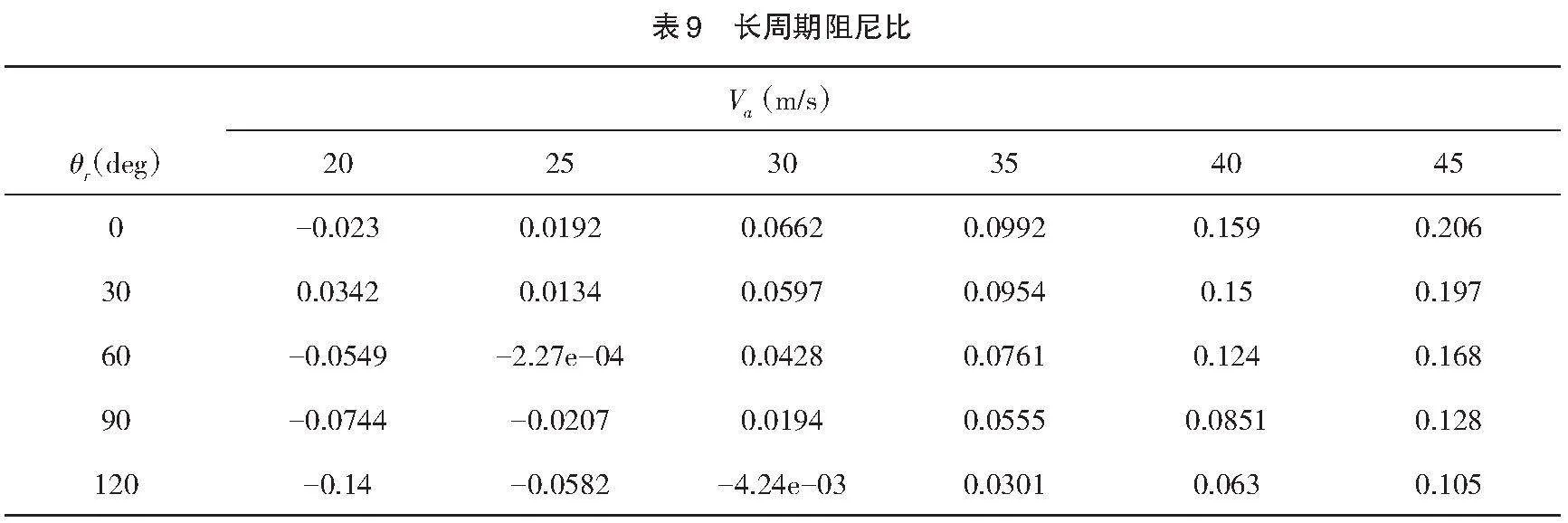
图9中下图可以看出长周期特征根在短机翼低速情况下存在不稳定区域(即极点在虚轴右侧,表中阻尼比为负的情况),总体变化趋势为随着速度增大,其自然频率在减小,阻尼比在增大,而折叠角增大时,其阻尼比和自然频率都在增大。
纵向模态的阻尼比和自然频率见表7—表10。
4 结 论
本文对MWUAV的建模和动力学分析进行了研究。建立了非线性参数变化系统模型,并对参数变化对于静态特性的影响进行了分析,包括升阻特性、转动惯量特性和飞行包线的计算;在所建立模型基础上,进行了配平和线性化分析,包括配平迎角、油门和舵偏以及长短周期特性的分析。得出了在各个折叠角和空速情况下的配平特性及动稳定性,发现了在短机翼小空速情况下存在不稳定区域。分析结果可以为MWUAV的飞行工作点选择以及控制器设计提供依据。
参考文献:
[1]FAN B,LI Y,ZHANG R,et al.Review on the technological development and application of UAV systems[J].Chinese Journal of Electronics,2020,29(2):199-207.
[2]江波,屈若锟,李彦冬,等.基于深度学习的无人机航拍目标检测研究综述[J].航空学报,2021,42(4):137-151.
[3]高盈盈.海上搜救中无人机搜寻规划方法及应用研究[D].长沙:国防科技大学,2020.
[4]张富震,朱耀琴.复杂环境中多无人机协同侦察的任务分配方法[J].系统仿真学报,2022,34(10):2293.
[5]许建华,李权.支线货运无人机的发展现状,运行方式与关键技术分析[J].航空工程进展,2022,13(4):1-10.
[6]王玉杰,唐钟南,陈清阳,等.多无人机协同打击制导控制技术研究进展[J].航空工程进展,2023,14(2):1-11.
[7]刘洋,李一波,王扬扬.从 “捕食者” 看高空长航时察打一体化无人机的特点[J].国际航空,2009 (12):26-28.
[8]王大勇,李悦霖.高空长航时无人侦察机关键技术[J].飞航导弹,2009(11):31-35.
[9]耿峰,祝小平.高速攻击型无人机非线性鲁棒制导律研究[J].宇航学报,2008,29(3):922-927.
[10]HARVEY C,GAMBLE L L,BOLANDER C R,et al.A review of avian-inspired morphing for UAV flight control[J].Progress in Aerospace Sciences,2022,132:100825.
[11]宋玉端.DARPA 在开展变形无人机的研究[J].飞航导弹,2006 (12):30-30.
[12]XU D,HUI Z,LIU Y,et al.Morphing control of a new bionic morphing UAV with deep reinforcement learning[J].Aerospace Science and Technology,2019,92:232-243.
[13]CHANZY Q,KEANE A J.Analysis and experimental validation of morphing UAV wings[J].The Aeronautical Journal,2018,122(1249):390-408.
[14]AMEDURI S,CONCILIO A.Morphing wings review:Aims,challenges,and current open issues of a technology[J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2023,237(18):4112-4130.
[15]LINGLING C H U,QI L I,FENG G U,et al.Design,modeling,and control of morphing aircraft:A review[J].Chinese Journal of Aeronautics,2022,35(5):220-246.
[16]PRABHAKAR N,Gudmundsson S,et al.Dynamic analysis of a variable-span,variable-sweep morphing UAV[C].IEEE Aerospace Conference.2016.
[17]徐国武,白鹏.翼型连续变形过程中非定常气动特性研究[J].力学季刊,2012,33(2):165-173.
[18]TONG L,JI H.Multi-body dynamic modelling and flight control for an asymmetric variable sweep morphing UAV[J].The Aeronautical Journal,2014,118(1204):683-706.
[19]汪清,钱炜祺,丁娣.飞机大迎角非定常气动力建模研究进展[J].航空学报,2016,37(8):2331-2347.
[20]邵朋院.大尺度变参数无人机鲁棒变增益控制方法研究[D].西安:西北工业大学,2016.
[21]STEVENS B L,LEWIS F L,JOHNSON E N.Aircraft control and simulation:dynamics,controls design,and autonomous systems[M].Third Edition Hoboken,N.J:John Wiley amp; Sons,2016.
Longitudinal Modeling and Analysis of Flight Dynamics of a Morphing Win UAV
Abstract: In this paper, the longitudinal dynamics model of Morphing Wing UAV (MWUAV) is established and the flight dynamical characteristics are briefly analyzed on its basis.Firstly, a longitudinal nonlinear parameter-varying (NPV) model is established for the parameter variation characteristics of MWUAV; the effects of parameter variation on its static characteristics, including the lift-drag characteristics, the inertia characteristics, and the flight envelope, are analyzed; and on the basis of the established model and the analysis of the static characteristics, typical analysis points are selected and leveling and linearization are performed in the flight envelope of the MWUAV. On the basis of the established model and static characteristics analysis, the typical analysis points are selected, the leveling and linearization analysis are carried out, the relationship between the leveling amount and the parameter change is obtained, and the longitudinal long- and short-period modal characteristics are calculated. The modeling and analysis results can provide a design basis for the flight state design of the MWUAV and the controller design.
Key words:Morphing Wing UAV(MWUAV);longitudinal dynamics;flight dynamics;flight envelope;dynamical stability
