
一种小型无人机飞行控制及图像传输系统设计研究
2024-10-22 00:00:00李玲唐嘉成谭皓琳
郑州航空工业管理学院学报 2024年2期
关键词:STM32单片机


摘 要:文章设计了无人机的飞行控制及图像传输,将PID算法和飞行控制的公式相结合,建立更平稳的飞行控制模型。采用功能较为强大的STM32F4系列单片机作为中心处理器进行设计,分模块分平台来模拟实现无人机的飞行控制、图像采集和图像传输等功能。不仅可以增加飞行拍摄稳定性,也可以为跨平台飞行摄像传输提供参考。
关键词:飞行控制;图像传输;STM32单片机;ESP32-CAM
中图分类号:U693.4" "文献标识码:A" " "文献编号:1007 -9734 (2024) 02 -0058 - 07
随着高新技术产业的蓬勃发展,无人机技术得到广泛应用。无人机具有机动性强、作业效率高等优点,因此在军事、民用领域都开始广泛应用[1]。其中,无人机图像传输技术是其重要应用之一[2]。美国航空航天局(NASA)早在20世纪20年代就开始研究无人机图像传输技术,并在后来发展出了多光谱、高清晰度、红外线等各种传感器技术[3],以提高无人机在航拍、地质勘查、生态监测等方面的应用效果[4],具有开创性的价值。2017年,中国成功地研发出全球最大的无人机“彩虹-7”,该机可承载高精度摄像头完成45至52个小时的飞行[5]。
得益于无人机技术的蓬勃发展,无人机图像传输也呈现出广阔的发展空间。其飞行控制及图像传输技术也向着低功耗、低延时、高清晰等方向发展[6]。无人机图像传输技术的需求越来越多,但以模拟图像数据传输,利用视频电缆为媒介传输图像数据信号的系统容易受到距离、环境等的影响[7]。相比PC机的体积庞大且重,以嵌入式技术为基础核心的图像传输系统,具有体积小、使用灵便的优点[8],极其适合无人机等相近的可移动平台装载使用。
本系统基于STM32F411CE芯片,搭配ESP32-CAM摄像头模块以及各种外设模块共同组成。最终可使用遥控器通过NRF无线通信操纵四旋翼无人机起飞,无人机起飞后可通过MPU9250进行姿态检测,MPU解算后操纵电机实现自平衡,进而通过光流模块进行定高定点及自平衡。同时ESP32-CAM摄像头可以拍摄低延时、高清晰的图片并通过WiFi传输发送到终端。本系统对无人机和遥控器进行简单的电源管理,实现了低功耗的要求。
1 PID算法及四旋翼无人机飞行控制模型简介
1.1" PID算法
PID算法是一种常见的反馈控制算法,其名称来源于其使用的三个控制参数:比例(Proportional)、积分(Integral)和微分(Derivative)。PID控制算法的目标是根据控制误差(即期望值与实际值之间的差异)来调整控制器输出,以使其尽可能接近期望值[9]。其中比例越大,调节作用越激进,也就是说当前值和目标值相差较大时,可以将比例部分调大。其实我们可以类比弹簧的运动,当物体距离平衡位置越远时,回复力越大,起到的作用就相当于是回复力的作用。微分则可以设想弹簧在平衡位置上拉它一下之后松手。这时候它会开始震荡,如果阻力很小,它会震荡很长时间才能重新停在平衡位置。但如果我们给它一个阻尼作用,使得越接近目标时比例的调节作用越柔和,也就是说微分的作用就是刹住物理量的变化。但上述都是较为理想的情况,实际上系统总会产生静态误差,比如给水加热时存在散热,汽车行驶时存在摩擦,因此如果只考虑比例和微分,最后达到的稳态很可能和预期的稳态存在一定偏差。这时候就需要引入积分。
四旋翼无人机是通过三轴PID控制算法来实现控制和自稳定的,其中的控制算法公式如式(1)(2)(3):
[∂x=Kpx*xdesired-xactual+Kix*integralxdesired-xactual+" " " " " " nbsp; " " "Kdx*(derivative(xdesired-xactual))] (1)
[∂y=Kpy*ydesired-yactual+Kiy*integralydesired-yactual+" " " " " " " " " "Kdy*(derivative(ydesired-yactual))] (2)
[∂z=Kpz*zdesired-zactual+Kiz*integralzdesired-zactual+" " " " " " " " " "Kdz*(derivative(zdesired-zactual))] (3)
其中,Kp、Ki和Kd分别是比例、积分和微分参数,integral和derivative是对误差和变化率的积分和微分运算。
1.2" 飞行控制公式
四旋翼飞行器的数学模型可以分为两类:平衡模型和运动模型。
平衡模型主要是用来描述飞行器在静态平衡状态下的力学特性。平衡时,四旋翼的重力等于升力,旋转力矩等于零,飞行器不会产生任何位置和姿态变化[10]。平衡模型包括方程(4)(5)(6)。
单旋翼升力公式:
[L=0.5*ρ*V2*S*CL]" " " " " " " " " " " " (4)
其中L表示升力,ρ表示空气密度,V表示空气速度,S表示旋翼面积,CL表示升力系数。
总推力公式:
[T = 4 * Kf * ω2]" " " " " " " " " " " " (5)
其中T表示总推力,Kf表示电机常数,ω表示电机的转速。
平衡方程:
[mg=L]" " " " " " " " " " " " " " " " (6)
其中m表示四旋翼的质量,g表示重力加速度。
运动模型是用来描述飞行器在非平衡状态下的运动学和动力学特性。运动状态下,四旋翼具有姿态变化、位置变化和速度变化等动态特性[11],运动模型包括方程(7)(8)(9)。
欧拉角动力学方程:
[dphidt=p+sinphi*tantheta*q+cosphi*" " " " " " " " " " " " tantheta*r]" " " " " " " " " " " " " "(7)
[dthetadt=cosphi*q-sinphi *r]" " " " " " " " " (8)
[dpsidt=sinphicostheta*q+cosphicostheta*r]" " " " " " " " " (9)
其中,phi、theta、psi分别是飞行器的欧拉角,p、q、r分别是飞行器绕x、y、z轴的角速度[6]。
动力学方程:
[F=ma]" "[M=I*α] (10)
其中F表示合力,a表示加速度,M表示合力矩,I表示惯量矩阵,α表示平面角加速度。
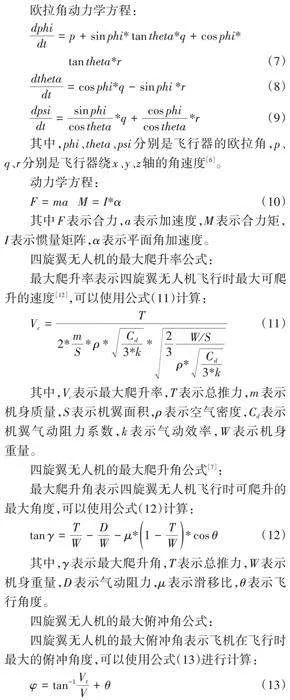
四旋翼无人机的最大爬升率公式:
最大爬升率表示四旋翼无人机飞行时最大可爬升的速度[12],可以使用公式(11)计算:
[Vc =T2*mS* ρ * Cd3*k *23WSρ*Cd3*k ]" " " " " (11)
其中,Vc表示最大爬升率,T表示总推力,m表示机身质量,S表示机翼面积,ρ表示空气密度,Cd表示机翼气动阻力系数,k表示气动效率,W表示机身重量。
四旋翼无人机的最大爬升角公式[7]:
最大爬升角表示四旋翼无人机飞行时可爬升的最大角度,可以使用公式(12)计算:
[tanγ=TW-DW-μ*1-TW*cosθ]" " "(12)
其中,γ表示最大爬升角,T表示总推力,W表示机身重量,D表示气动阻力,μ表示滑移比,θ表示飞行角度。
四旋翼无人机的最大俯冲角公式:
四旋翼无人机的最大俯冲角表示飞机在飞行时最大的俯冲角度,可以使用公式(13)进行计算:
[φ=tan-1VtV+θ]" " " " " " " " " " " " " " (13)
其中,φ表示最大俯冲角,Vt表示水平风速,V表示飞行速度,θ表示飞行角度。
2 图像传输系统
本设计采用ESP32-CAM图传系统,它是一种用ESP32开发板和摄像头模块构建的远程无线图像传输系统。
ESP32-CAM图传系统的原理是通过ESP32模块实现WiFi模块与摄像头模块的互联,采集摄像头模块拍摄的图像,通过WiFi模块将图像传输到远程接收端进行显示。其基本流程如下:
(1)安装和配置Arduino开发环境以及ESP32和摄像头模块的库和驱动程序。
(2)在Arduino开发环境中,编写ESP32的程序,程序通过WiFi模块连接到局域网,并通过WiFi服务器与远程接收端保持连接。
(3)通过使用摄像头模块拍摄照片,并使用摄像头库将图像数据传输到ESP32开发板。
(4)ESP32开发板使用WiFi模块将图像数据通过局域网网络发送到远程接收端。数据传输通过TCP或UDP协议进行。
(5)通过在终端上搭建Web接收器,对接收到的图像数据进行保存。
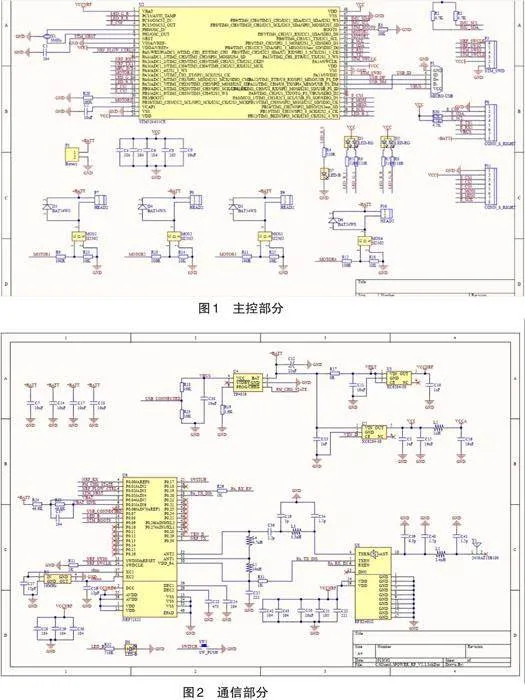
3 电路图设计
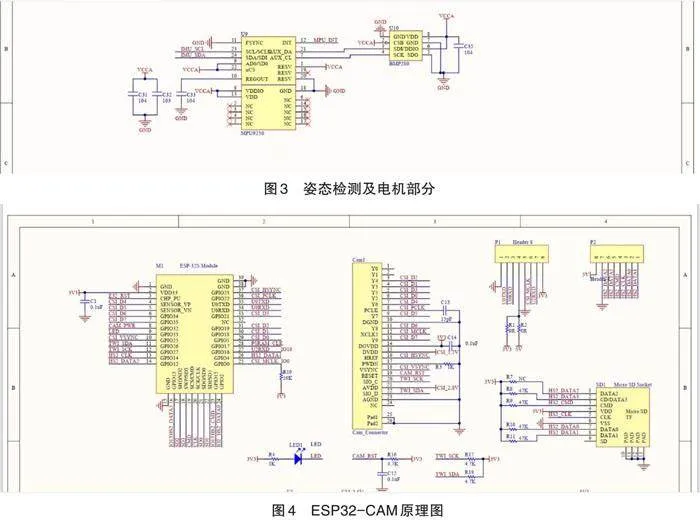
根据上文对飞行控制模型的设想,集成飞行驱动模块、无线通信模块及电源管理模块,利用Altium Designer 20设计出电路图原理如图1、图2、图3、图4。
4 系统功能测试
4.1" 系统测试说明
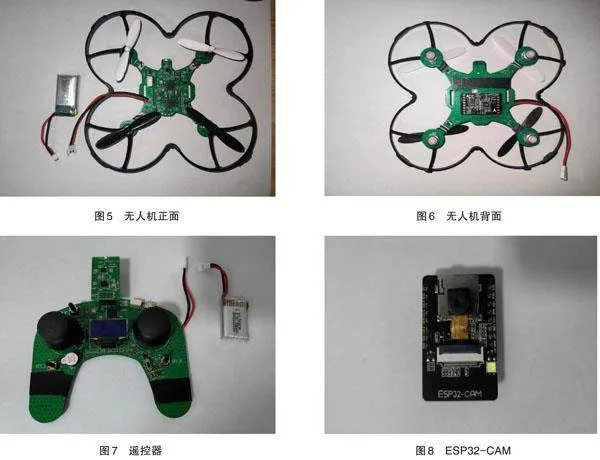
将本无人机飞控部分进行焊接后,将四轴飞行器和图传部分的ESP32-CAM进行组装以及使用DAP-LINK向STM32单片机烧录完整程序,并使用串口将图传程序下载到ESP32-CAM后完成软硬件设计,最后进行整个控制系统的整体测试。根据本控制系统的基本要求,要对所有预设实现的功能进行单一测试,观察其测试结果是否符合要求,这样才能确保系统的完整性,通过反复的实际测试才能将系统中的潜在隐患及时发现,最终完善其功能。硬件实物如图5、6、7、8所示。
4.2 各模块功能测试
4.2.1姿态传感器-MPU9250测试
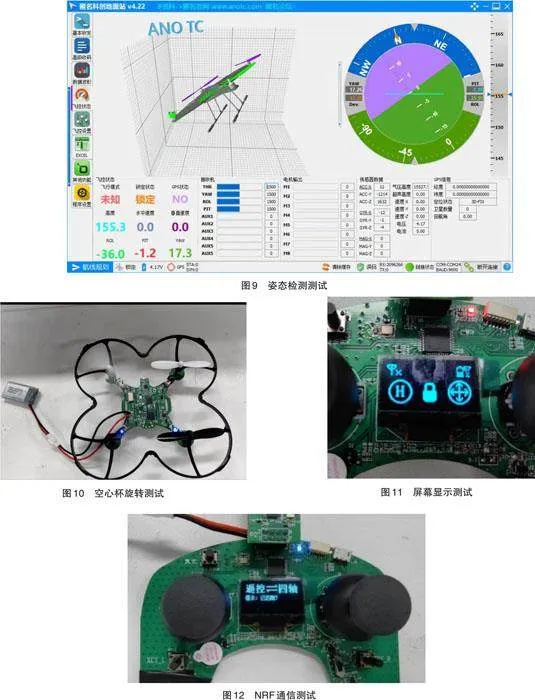
如图9所示,利用串口将姿态传感器数据发送到匿名飞控地面站,可显示传感器数据、飞控状态、无人机飞行仿真图。
4.2.2空心杯电机测试
如图10所示,驱动空心杯电机转动桨叶,电机转动正常且能随PWM波的增大而加快转速。
4.2.3屏幕测试
如图11所示,连接电源,可以看到屏幕被驱动正常显示。
4.2.4NRF通信测试
如图12所示,NRF成功通信后会在屏幕上显示出“已匹配”字样。
4.2.5光流模块测试
如图13所示,驱动光流模块测出到地面的距离,并可通过串口打印到上位机显示。
4.2.6飞行测试
本无人机飞控要做到自平衡和定高定点飞行,且支持通过遥控器进行遥控,实际演示飞行状态如图14所示。
4.2.7图传测试
本系统图传部分要摄像头能够拍摄俯视图片并发送到PC终端进行显示。实际演示如图15、图16所示。
5 结 论
本文提出了一种小型无人机的飞行控制及图像传输系统设计方案。此方案采用STM32F4系列单片机作为中心处理器,进行飞行控制及无线通信,进而搭建无人机平台。然后使用ESP32-CAM作图片拍摄及WIFI传输,将摄像头搭载到无人机平台上拍摄地面俯视图,发送给终端。经过原理了解和理论设计进而得到设计方案。最后进行包括飞行测试和图传测试的系统测试。测试结果表明:在稳定的信号传输以及电源供给之下,预计系统的各项功能正常。对无人机飞行控制及图像传输提供了一种可行的方案。
参考文献:
[1]陈锐. 四旋翼无人机目标追踪系统研究与设计[D].南京:南京邮电大学,2022.
[2]裴艺敏. 无人机多天线图传接收系统设计及仿真[D].北京:中国科学院大学(中国科学院国家空间科学中心),2021.
[3]LUNSFORD IAN,BRADLEY THOMAS H. Evaluation of unmanned aerial vehicle tactics through the metrics of survivability[J].The Journal of Defense Modeling and Simulation: Applications,Methodology,Technology,2022,19(4):230-265.
[4]SHEVTSOV V A , KIRDYASHKIN V V , TIMOSHENKO A V,et al.Experimental estimates of angular coordinates and location of radio emission sources in unmanned aircraft monitoring systems[J].Russian Aeronautics, 2021, 64(3):562-570.
[5]李明军.基于图像处理技术的无人机河道巡查系统[J].河北水利,2022(5):32-34.
[6]OSBORNE T.Croatian officials examine wreckage of Unmanned Aircraft Near zagreb[J].Aerospace Daily amp; Defense Report, 2022, 279(14):6-26.
[7]华厚强.模块化低空长航时无人机的设计与实现[J].电子测量技术,2021,44(9):13-21.
[8]尹军祖.基于LTE的无人机图传网[J].中国新通信,2021,23(21):30-32.
[9]肖斌. 基于无人机视觉的仓库货物缺陷检测系统研究[D].绵阳:西南科技大学,2021.
[10]葛男男. 面向输电线路巡检的无人机图传系统设计[D].南京:南京信息工程大学,2021.
[11]郭琦,游绍彦,王宝光,李亚楠.地形图测绘工作自动化中的无人机技术探析[J].信息记录材料,2022,23(11):243-245.
[12]陈钰坤. 无人机航拍图像目标识别与定位方法研究[D].沈阳:沈阳大学,2022.
责任编校:陈 强,裴媛慧
Flight Control and Image Transmission of Unmanned Aerial Vehicles
LI Ling1,TANG Jiacheng2,TAN Haolin1
(1. School of Automation,Zhengzhou University of Aeronautics,Zhengzhou 450046,China ;
2.Zhikong Network Co.,Ltd,Hangzhou 310000,China)
Abstract: This paper designs the flight control and image transmission of the UAV, and combines the PID algorithm with the flight control formula to establish a more stable flight control model. The more powerful STM32F4 series microcontroller is used as the central processor for design, and it is divided into modules and platforms to simulate and realize the functions of UAV flight control, image collection and image transmission. It can not only increase the stability of flight shooting, but also provide a reference for cross-platform flight camera transmission.
Key words: flight control; image transmission; STM32 microcontroller; ESP32-CAM
基金项目:航空航天电子信息技术河南省协同创新中心、河南省通用航空技术重点实验室、航空航天智能工程河南省特需急需特色骨干学科群资助
作者简介:李 玲,博士,副教授,研究方向为人工智能、电力牵引与控制。
猜你喜欢
电子技术与软件工程(2016年20期)2016-12-21 10:44:40
电子技术与软件工程(2016年19期)2016-12-19 20:34:26
科技视界(2016年26期)2016-12-17 08:35:54
教育界·下旬(2016年8期)2016-12-14 10:01:53
电脑知识与技术(2016年17期)2016-07-23 21:15:17
中国高新技术企业(2015年3期)2015-03-26 18:38:25
