
垂直起降无人机气动布局设计研究进展
2024-10-22 00:00:00王晓璐刘威威周冲李光浩
郑州航空工业管理学院学报 2024年2期



摘" " 要:垂直起降无人机是当前航空领域的研究热点。文章介绍了倾转旋翼、倾转涵道和双系统式三类垂直起降无人机的工作原理和典型机型,分析和讨论了其气动布局特征及其设计研究进展,提出了垂直起降无人机气动布局设计和优化、飞行控制、侧风效应和结构轻量化设计方面的研究建议。
关键词:垂直起降无人机;电动垂直起降;气动布局设计;侧风效应;飞行稳定性
中图分类号:V221" "文献标识码:A" " 文章编号:1007 - 9734 (2024) 02 - 0025 - 08
在过去几十年里,无人机技术快速发展,在侦察、监视和地面打击等军事领域得到了广泛的应用,在交通监控、灾害管理、基础设施检查和紧急援助等民用领域的应用也逐渐扩大[1]。
固定翼和多旋翼是两种传统的无人机类型,在过去20年中主导了无人机的发展方向。这两种类型的无人机各有优缺点,但也存在固有的局限性。固定翼无人机在巡航速度、有效载荷能力、飞行范围和续航能力方面优势明显,但其起飞和着陆依赖于跑道或发射/回收设备,不适用于超低速飞行或受限的任务环境。多旋翼无人机对起降点的要求较为宽松,还具有独特的悬停能力,增强了执行任务的多功能性。然而,速度和续航能力的限制,削弱了多旋翼无人机在长续航任务中的能力[2]。
目前,由于城市低空交通和物流派送等方面的需求,垂直起降无人机受到广泛关注。一般将垂直起降无人机分为直升机、多旋翼、倾转旋翼[3-4]、倾转涵道[5]和双系统[1]等多个类别。考虑到直升机理论相对成熟,多旋翼无人机的布局相对简单,本文仅介绍和讨论后三类垂直起降无人机的气动布局设计现况。对于这三类无人机,为提高综合飞行性能,一般期望其以多旋翼模式垂直起飞、悬停和降落,并以固定翼模式巡航前飞,以保证相对较长的飞行距离和飞行航时。由于它们兼顾多旋翼和固定翼的优势,且应用范围更广、操作灵活性更强,有望改变全球无人机市场的未来[6-7]。
本文首先介绍了上述三类垂直起降无人机的工作原理和典型机型。然后,分析和讨论了其气动布局特征和设计研究进展。最后,提出了气动布局设计和优化、飞行控制、侧风效应和结构轻量化的发展建议。
1 垂直起降无人机气动布局研究进展
在垂直起降无人机的发展过程中,研发人员设计了多种机制,用于实现垂直起降与巡航飞行模式之间的切换。
1.1 倾转旋翼式
通过倾斜旋翼完成转换的垂直起降无人机被称为倾转旋翼垂直起降无人机。其旋翼水平时,用于垂直飞行和悬停。在转换过程中,旋翼逐渐倾斜,并最终定向为产生向前的推力或拉力,平行于飞机的纵轴,实现垂直飞行过渡到水平飞行。为了着陆而转换回垂直飞行,旋翼再次倾斜,沿着飞机的垂直轴产生向上的拉力。
借鉴V-22鱼鹰的倾转旋翼的方式,美国贝尔直升机德事隆(Bell Helicopter Textron)公司研发了“鹰眼”倾转旋翼无人机[8-9],其具有更宽的飞行包线、更长的续航时间和更高的巡航速度。韩国航空宇航研究院(Korea Aerospace Research Institute)研制了“TR-60”倾转旋翼无人机[10],并首次实现了在舰船上降落,提升了此类型无人机的任务能力。为了避免传统倾转旋翼无人机在气动和飞行控制方面的问题,中国航天空气动力技术研究院研发了“彩虹-10”(图1)倾转旋翼无人机。其将发动机安装在机身内部,通过传动轴的方式驱动旋翼,避免了翼尖安装可倾转发动机舱,同时,改善了此类无人机的涡环问题,提高了气动效率[11]。在倾转三旋翼和四旋翼无人机方面,以色列航空航天工业公司(Israel Aerospace Industries)和美国大角星无人机公司(Arcturus UAV)分别研发了“黑豹”倾转三旋翼无人机和JUMP 20 VTOL无人机[12]。在倾转旋翼与翼身融合布局结合方面,深圳智航公司研发了V200和V380等机型[13]。
1.2 倾转涵道式
倾转涵道式无人机的垂直起降方式与倾转旋翼式相同,不同之处在动力系统方面。涵道风扇与旋翼相比,能较好地与机体或机翼进行结合,使气动效率得到提高。
2007年,根据美国国防部对具有海上能力的垂直起降无人机的需求,美国动力飞行系统公司(American Dynamics Flight Systems)研发了AD-150倾转涵道垂直起降无人机。其利用两个安装在翼尖的涵道风扇,维持悬停、向前飞行和过渡所需的拉力[1]。2013年,英国和意大利合资的阿古斯特维斯特兰公司(Agusta Westland)研发了“Project Zero”倾转涵道垂直起降无人机(图2),其两个大涵道风扇与机体以符合空气动力学的方式融合在一起,涵道风扇可以倾转90°,从而实现飞行任务的转换[7]。
1.3 双系统式
双系统垂直起降无人机具有两套推进系统,一套用于垂直起降的升力,另一套用于巡航飞行的牵引或推进力。由于其不需要倾转机构,与上述两种垂直起降无人机相比,该类无人机具有机械设计相对简单和可靠性较强的优势。
2007年,西班牙国家航空航天技术研究所(Spanish National Institute for Aerospace Technology)推出一种新概念自适应直升机(Helicopter Adaptive Aircraft),其使用两套动力系统,与直升机相似的主旋翼用于垂直飞行和悬停,尾部的旋翼用于产生向前飞行的推力。在悬停和垂直起降期间,变形的机翼保持收缩在机身下方。在过渡阶段,隐藏的机翼逐渐展开,以产生巡航飞行的升力;同时主旋翼的叶片逐渐收回,以减少前飞阻力[2]。2016年,德国和瑞士的TU-150项目开发了一种双系统垂直起降无人机(图3),翼尖处两个朝上的旋翼用于垂直飞行,安装在尾部的推进式旋翼用于产生向前的推力[1]。
2 垂直起降无人机气动布局设计分析
2.1 倾转旋翼式
倾转旋翼垂直起降无人机的技术发展较早,且技术较为成熟。在其总体设计过程中,进行了相关的理论和实验方法的探讨。Kaparos等[14]提出了一种倾转旋翼垂直起降无人机设计概念,使用低保真度工具和半经验相关性研究了气动性能,预测了无人机各部件的阻力、干扰产生的阻力段和螺旋桨风阻。由于倾转旋翼垂直起降无人机的气动干扰机理较为复杂,需要考虑较多的因素,Zeng等[15]综合考虑了倾转旋翼垂直起降无人机的质量平衡、空气动力学和优化概念等方面的因素,利用风不确定度模型、冗余模型和无人机空速约束,提出了此类无人机设计优化公式,能够较快地进行气动布局设计和优化。但是,Zeng提出的优化公式也有其局限性,未能用实验数据进行验证。在实验数据的验证方面,Mylapore等[16]利用简化的倾转四旋翼飞行器缩比模型,进行了悬停和低速前飞状态的研究,获得了不同高度下的旋翼性能和载荷数据,分析了垂直起降无人机气流的悬停效应和地面效应,但实验分析仅限于悬停和起降。Yeo等[17]对巡航状态下的垂直起降无人机气动特性进行了分析,得出了气动干扰可以提高常规倾转旋翼机的升阻比,也可以降低倾转旋翼机的性能的结论。简化理论方法和实验可以高效地计算旋翼的气动性能,但需建立在大量的经验及实验参数修正的基础上,故较难分辨复杂气动外形与旋翼气动特性之间的联系,无法深入地探索倾转旋翼气动特性演变的机理。
理论方法和试验性的计算流体力学方法具有较高的可信度,其促进了倾转旋翼垂直起降无人机的研究。Cronin等[18]利用无粘性流动求解器构建模型,表征了倾转旋翼和机翼相对位置在过渡飞行状态中升力降低的因素,同时分析了旋翼的外形和位置对机翼升力的影响。针对倾转旋翼的特点,李鹏等[19]针对悬停状态,建立了旋翼和机翼之间气动干扰的高效混合计算流体力学方法,并对旋翼和机翼之间的非定常流场和气动特性进行了数值研究,模拟了旋翼的气动干扰现象。叶片是旋翼的重要组成部分,对旋翼整体性能有较大的影响。招启军等[20]采用适合倾转旋翼和螺旋桨气动外形综合优化设计的方法,削弱了桨叶尖部的气流分离现象,明显提高了倾转旋翼的综合气动效率。
倾转旋翼垂直起降无人机的旋翼、机翼和机身之间的气动干扰问题较为复杂,一直是数值模拟方法的重点研究领域。孙凯军等[11]对旋翼、机翼和机身之间的气动干扰问题,使用数值模拟方法验证了气动干扰的“喷泉效应”,随后探究了襟副翼变化对旋翼拉力系数的影响。张飞等[21]验证了旋翼与机翼之间的气动相互作用的复杂性,指出合适的旋翼位置能够提升无人机的整体性能。林沐阳等[22]分析了旋翼和机身间的气动干扰特性,探究了悬停和巡航状态下旋翼对机翼和机身阻力的影响。王军杰等[23]研究了垂直起降状态的气动特性以及部分参数对气动特性的影响。
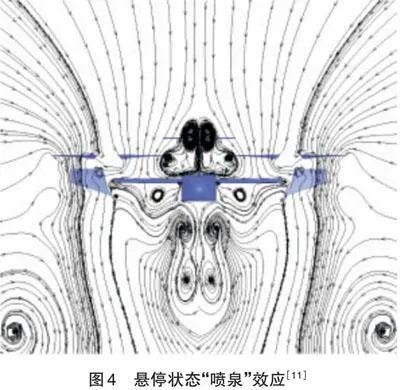
倾转旋翼同时承担固定翼拉力/推进螺旋桨和垂直起降的旋翼,兼顾垂直起降、巡航和过渡状态。因此,造成了倾转旋翼垂直起降无人机在气动性能、控制策略和结构重量等方面,面临较为复杂的设计问题。有研究指出,倾转旋翼垂直起降无人机的旋翼与机体或机翼之间存在复杂的气动干扰问题。在前飞状态下,旋翼的尾流会出现周期性的变化,其气动力特性反作用于机翼,容易造成旋翼和机翼之间的稳定性问题,进而对飞行安全造成一定的影响。在过渡状态下,由于飞行状态转换,其飞行的速度范围要求较小,同时旋翼的气动参数(倾转角度、飞行速度、迎角等)会不断地发生改变,导致了较大的控制难度(气动特性和稳定性呈不规则变化是主要原因)。在悬停状态和起降状态,机翼受到旋翼喷出的“下洗流”的不断冲击,可能会出现“喷泉”效应(图4),使机翼产生较大的垂直方向载荷;与此同时,机翼反作用产生的“下洗流”对旋翼的效率产生较大的影响。
2.2 倾转涵道式
倾转涵道垂直起降无人机的起降方式与倾转旋翼式相同,不同之处是动力部件为涵道风扇。涵道风扇可以较好地融入机体中,使此类无人机具有更高的悬停效率、巡航速度和有效载荷。此外,由于涵道的环括作用,涵道风扇的结构更加紧凑、气动噪声低、安全性好,广泛应用于飞行器设计。
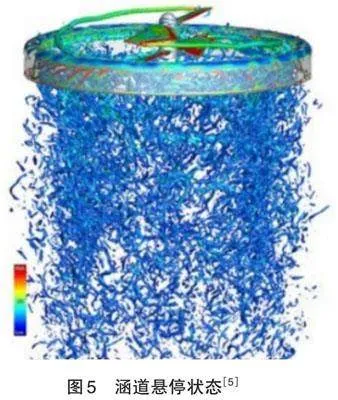
由于旋翼和涵道之间的相对旋转运动和相互作用,其流场结构与螺旋桨有较大的不同,使得倾转涵道垂直起降无人机的气动特性更为复杂。因此,国内外研究人员对其气动特性进行了相关研究[24-25]。Thouault等[26]使用计算流体动力学模拟、粒子图像测速技术和可视化技术,分析了其气动力和流场特点。有研究发现涵道风扇的控制方式,也对无人机的气动特性有较大的影响。Ohanian等[27]探索了合成喷流制动器在涵道式无人机前缘和后缘流动控制方面的新应用。Ryu等[28]结合计算流体动力学软件和实验,进一步研究了侧风中涵道风扇的气动力和涵道前缘分离现象。Deng等[29]通过对无人机压力和流场的测量,研究和分析了垂直起降和着陆状态下无人机的气动特性(图5)。Jimenez等[30]对几种涵道风扇进行了计算分析,确定旋翼气流对悬停和巡航飞行中推力产生的影响,说明了偏置旋翼气流可以提高涵道风扇无人机的悬停性能。
以上研究虽分析了涵道式无人机的整体气动特性,但对涵道风扇气动干扰机理的探究仍待进一步加强。因此,Akturk等[31]基于3D RANS模拟了悬停状态下涵道风扇的二次流、叶尖涡流、叶片黏性效应和尾流,并分析了轮毂区域损失和尾流旋转损失对涵道风扇整体气动性能的影响。Zhou等[32]对含气体驱动涵道风扇推进系统垂直起降无人机的起飞和着陆状态下的飞行行为进行了研究。Zhao等[33]对倾转涵道垂直起降无人机在不同迎角和速度下的气动力系数和不同气流模式进行了评估和分析。这些研究为倾转涵道垂直起降无人机气动设计和研究打下了坚实基础。
随着倾转涵道垂直起降无人机的应用范围逐渐扩大,研究人员提出了若干新构型。苏运德等[34]设计的新型共轴式涵道风扇无人机采用共轴式双桨克服转矩,利用导流片实现姿态控制,为共轴式涵道风扇技术在垂直起落无人机上的应用提供了可靠的技术数据。稳定性是此类无人机的一个弱点,王春阳等[35]设计了一种新构型的涵道式无人机,并对其飞行过程中的悬停和过渡两个飞行状态,进行了纵向的飞行平衡求解和稳定性分析。
含涵道的旋翼比传统旋翼有更高的推进效率,还可以保护螺旋桨免受过多的螺旋桨/旋翼空气动力相互作用的影响,实用性更强[7]。从飞行器外形角度来说,倾转涵道可以特别灵活地安装在机身和机翼上,并且提供升力的方式较为简单;与此同时,涵道风扇与机体的融合,在气动性能上可能更具优势。
然而,倾转涵道垂直起降无人机一直存在气动分析困难的问题(涵道风扇的工作环境较复杂和飞行状态较多)。首先,较多的研究数据需要通过实验获取,极大地限制了涵道风扇无人机气动特性的研究。同时,在前飞状态下,倾转涵道可能会影响无人机的整体性能,主要原因是涵道的直径增大到一定程度后,其产生的阻力会显著增大,导致飞行效率降低;在较高的涵道迎角下,与开放式螺旋桨相比,涵道风扇在下洗流的影响下,可能会产生入流畸变和涵道内侧的失速,作用于涵道上的气动力和力矩也可能产生较大的变化。
2.3 双系统式
双系统垂直起降无人机的特点是使用两个独立的推进系统,分别用于垂直起降和巡航飞行。波音基于“鱼鹰V-22”开发了“幽灵雨燕”无人机,其利用埋在机体内两个向下的风扇来提供起降和悬停的升力,涵道风扇在翼梢提供前进的动力,且提高了气动效率[7]。与常规倾转旋翼/涵道垂直起降无人机相比,双系统垂直起降无人机额外安装了一套动力系统,对此类无人机的气动特性产生了较大的影响,研究人员对此进行了大量研究。
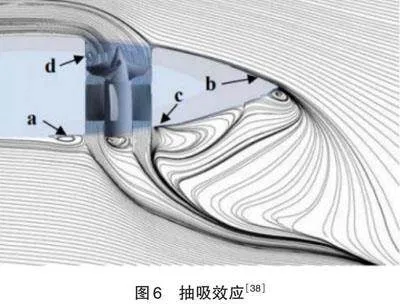
在总体设计方面,郑志成等[36]分析了失重的相关概念,建立了针对双系统垂直起降无人机升力风扇的估算模型,分析了全机总体参数与过渡态阻力峰值的影响关系,并给出总体布局设计的相关指导原则。李满等[37]进一步针对无人机实现垂直起降产生的附加结构和动力系统重量的设计问题,建立了附加重量数学模型。在气动分析方面,Thouault等[38]利用实验和CFD方法分析了内埋式旋翼上方入口气流分离引起的不稳定行为(图6),说明了旋翼的喷流堵塞在机翼下翼面会形成马蹄形涡和尾流涡,解释了反旋转涡的产生和扩散现象。在此基础上,王红波等[39]通过验证Thouault的实验,提出了内埋式旋翼的喷流在机翼上产生的特有“抽吸”和“堵塞”效应,进一步解释在机翼后缘引起升力损失的原因和卷起的对涡。对于地面效应的影响研究,一直是此类无人机研究的弱点。Footohi等[40]分析了机体内埋单旋翼和多旋翼的地面效应,得出其正相互作用可以提升旋翼的推力并改善无人机的悬停和垂直起降的气动效率问题的结论。Culpepper等[41]进一步说明了内埋式旋翼倾斜角和入口形状的关系,并引入导流叶栅,使无人机的气动性能和纵向稳定性进一步提高。
双系统垂直起降无人机在悬停和巡航时具有良好的稳定性和操控性,状态转换较为简单。其最常用的是多旋翼垂直起降和推进构型,配备一个或两个独立的动力系统,以提高悬停和垂直起降模式下的效率。双系统垂直起降无人机在垂直飞行过程中,其旋翼动力系统工作,水平推进旋翼动力系统保持关闭;而过渡模式,水平推进旋翼动力系统工作,飞机达到了与失速速度相等的水平速度,垂直起降旋翼动力系统停止工作。然而,其在巡航飞行期间保持关闭的旋翼动力系统,实际上增加了额外的重量和气动阻力,降低了巡航效率。同时,多组独立的动力系统致使无人机的操控变得更加复杂。
上述三种垂直起降无人机,在前飞、悬停、过渡和垂直起降状态方面存在若干不足,如表1所示。
翼身融合布局无人机具有良好的空气动力学性能,有利于将推进系统安装在机体内,减小浸润面积和干扰阻力,并且能产生较为可观的升力[42-46]。有研究表明,有包裹的旋翼较未有包裹的旋翼,推力系数可以增加20 %~94 %[40]。基于这些设计思想,有研究人员提出动力系统置入翼身融合布局机体内的新构型垂直起降方式[39][41][55]。其中,内置动力系统在仅使用一套动力系统的情况下,实现了无人机垂直起降、悬停、过渡和前飞等飞行状态,简化了动力系统和操控系统,减少重量损失和气动阻力,提升了巡航飞行和起降及悬停效率[55]。这种具有较多优点的新概念气动布局,可能是未来的研究重点之一。
3 建议和总结
本文介绍了垂直起降无人机的背景和技术特征,对其进行了归纳,提出了若干关键技术问题。随着“5G+无人机”和无人机产业化的发展,未来垂直起降无人机的研究趋势可能为:
(1)新概念气动布局设计及优化
垂直起降无人机的气动布局设计应当从航程、续航时间、有效载荷能力、巡航速度、稳定性、气动效率和系统效率等方面,综合分析评估,提出新概念气动布局设计方案。气动布局优化具有多学科和非线性特点,利用可靠性的多学科设计优化框架,可高效解决这些多目标的优化问题。
对于垂直起降无人机在垂直飞行、过渡、巡航和悬停等复杂状态的气动布局设计问题,多学科设计优化可能是高效和精准的解决方法之一。
(2)飞行稳定性和操控性
垂直起降无人机通过倾转动力系统,实现垂直起降、悬停和飞行机动性。然而,倾转运动往往带来高度的非线性动力学效应和复杂的空气动力学效应,进而影响飞行轨迹和控制律设计。对于垂直起降无人机稳定性和操控性的研究,主要有数值模拟和风洞实验两类方法。数值模拟中的叶素法和面元法,可能不适用于螺旋桨滑流特性分析和高精度气动导数计算;风洞实验则成本相对较高。
可使用高精度数值模拟方法获取气动力系数,并根据六自由度方程建立垂直起降无人机的飞行动力学模型,研究分析悬停、垂直起降、巡航和过渡状态的俯仰、滚转和偏航稳定性,并对操控进行设计和评估。
(3)飞行中的侧风效应
侧风效应对垂直起降无人机的影响较为显著,成为此类无人机坠毁的主要原因之一。在垂直起降模式下,侧风气流不仅会在旋翼上产生较强的气动力和力矩,还会导致翼载荷分布不均衡,进而引发严重的振动和稳定性下降等问题。若同时耦合地面效应,则气动力的变化将尤为明显;此外,在过渡和巡航状态下,侧风强度和方向的变化,会降低螺旋桨效率;旋翼和机体之间的气动干扰更加复杂,影响垂直起降无人机的稳定性和操控性。
因此,有必要研究侧风效应下的垂直起降无人机在垂直起降、悬停和过渡状态的飞行性能及稳定性,以拓宽垂直起降无人机的应用范围,并提高其可靠性。
(4)结构轻量化
从无人机机体平台技术观点看,垂直起降无人机要求低成本、轻结构、长航时和使用寿命长。然而,典型的垂直起降无人机存在结构笨重、功率损失大、载荷复杂,工况多变等众多技术难点。在垂直起降过程中,面临较大的重量载荷、惯性载荷和阻力,削弱了起降及悬停效率和有效载荷系数。动力装置产生的推力、冲击载荷以及阵风载荷都将对无人机结构产生影响,对结构的强度要求较高。
针对传统的倾转传动机构的不足,可开发具有动力传递简洁、结构重量轻和结构强度大的机体以及倾转结构。在拓扑优化、增材制造和智能控制技术快速发展的背景下,主动气动弹性技术可以大幅降低机翼结构刚度要求;智能材料结构将驱动传感控制和结构融为一体,为结构简洁、重量轻、可靠性高的垂直起降无人机设计提供了条件。利用这些方法有望实现垂直起降无人机的轻量化、拓扑化和一体化设计。
垂直起降无人机有可能改变情报、监视、侦察、数据收集、测量、测绘、包裹递送和无人机集群应用等领域的操作方式。同时,其有望在综合性能上超越传统的固定翼和旋翼无人机,进而影响无人机产业发展。
参考文献:
[1]SAEED A S, YOUNES A B, CAI C, et al. A survey of hybrid unmanned aerial vehicles[J].Progress in Aerospace Sciences, 2018,98:91-105.
[2]REHAN M, AKRAM F, SHAHZAD A, et al. Vertical take-off and landing hybrid unmanned aerial vehicles: An overview[J]. The Aeronautical journal, 2022,126(1306):2017-2057.
[3]刘凯, 叶赋晨. 垂直起降飞行器的发展动态和趋势分析[J].航空工程进展,2015,6(2):127-138.
[4]唐亮, 徐庆九. 海军倾转旋翼无人机技术和发展优势综述[J].科技资讯,2012,28:73-74,76.
[5]ZHANG T,BARAKOS G N.Review on ducted fans for compound rotorcraft[J].Aeronautical Journal New Series, 2020, 124(1277):941-974.
[6]KHAN A M, SHAHZAD A, SHAMS T A. An overview of stability and performance analysis of hybrid vertical take-off and landing unmanned aerial vehicle[C]//3rd Pak-Turk International Conference on Emerging Technologies in the field of Sciences and Engineering. 2020.
[7]王科雷, 周洲, 马悦文, 等.垂直起降固定翼无人机技术发展及趋势分析[J].航空工程进展, 2022,13(5):1-13.
[8]于进勇, 王超. 垂直起降无人机技术发展现状与展望[J].飞航导弹,2017,5:37-42.
[9]BESHEARS T, PETERSON G I. The hv-911 eagle eye tiltrotor uav an exciting future for coast guard aviation[R]. American Society of Naval Engineers,“ASNEDays”Tech-nical Paper, 2004:1-10.
[10]YOO C,PARK B,KANG Y. Evaluation of operational flight program in tilt rotor UAV[R]. AIAA-2008-7415, 2008.
[11]孙凯军, 张碧辉, 付义伟, 等. 悬停状态倾转旋翼机非定常气动干扰研究[J].航空工程进展,2019,10(6): 744-749.
[12]彭延辉, 徐国华. 无人驾驶直升机的技术发展及其关键技术[J].飞行力学,2004,1:4-8,20.
[13]邵扬杰, 刘莉, 曹潇, 等.倾转旋翼无人机发展现状及关键技术概述[J].战术导弹技术,2022,1:12-20.
[14]KAPAROS P,BLIAMIS C,YAKINTHOS K. Conceptual design of a UAV with VTOL characteristics[R]. AIAA-2019-3137, 2019.
[15]ZENG C,ABNOUS R,GABANI K,et al.A new tilt-arm transitioning unmanned aerial vehicle: Introduction and conceptual design[J].Aerospace Science and Technology,2020, 99(2):105755.
[16]MYLAPORE A R,SCHMITZ F H.An experimental investigation of ground effect on a quad tilt rotor in hover[J].Journal of the American Helicopter Society,2015,60(1):012002.
[17]YEO H,JOHNSON W.Performance and design investigation of heavy lift tilt-rotor with aerodynamic interference effects[J].Journal of Aircraft,2012,46(4): 1231-1239.
[18]CRONIN W E. Aerodynamic analysis of a fixed rotor hybrid VTOL UAV in transitional flight using CFD[C]//Summary Report 2019, UNSW Canberra at ADFA,2019.
[19]李鹏, 招启军. 悬停状态倾转旋翼/机翼干扰流场及气动力的CFD计算[J].航空学报,2014,35(2):361-371.
[20]招启军, 蒋霜, 李鹏, 等. 基于CFD方法的倾转旋翼/螺旋桨气动优化分析[J].空气动力学学报,2017, 35(4):544-553.
[21]张飞, 王云, 谭锟. 复合式垂直起降固定翼无人机旋翼和机翼的干扰分析[J].航空工程进展,2019,10(6): 810-816.
[22]林沐阳, 招启军, 赵国庆. 基于滑移网格的倾转旋翼机全机干扰流场研究[J].航空科学技术,2017,35(4): 100-108.
[23]王军杰, 俞志明, 陈仁良, 等. 倾转四旋翼飞行器垂直飞行状态气动特性[J].航空动力学报,2021,36(2): 249-263.
[24]ZHANG T, BARAKOS G N.Review on ducted fans for compound rotorcraft[J].Aeronautical Journal New Series, 2020,124:1277.
[25]CAI H, ZHANG Z, DENG S. Numerical prediction of unsteady aerodynamics of a ducted fan unmanned aerial vehicle in hovering[J]. Aerospace,2022,9:318.
[26]THOUAULT N, BREITSAMTER C, Adams N A. Numerical investigation of inlet distortion on a wing-embedded lift fan[J].Journal of Propulsion amp; Power,2011,27(1): 16-28.
[27]OHANIAN J, KARNI D, LONDENBERG K. Ducted-fan force and moment control via steady and synthetic jets[J].Journal of Aircraft,2011,48(2):514-526.
[28]RYU Y, CHO S, CHO J. Aerodynamic analysis of the ducted fan for a VTOL UAV in crosswinds[J]. Transactions of The Japan Society for Aeronautical and Space Sciences,2016,59:47-55.
[29]DENG S,REN Z. Experimental study of a ducted contra-rotating lift fan for vertical/short takeoff and landing unmanned aerial vehicle application[J].Proceedings of the Institution of Mechanical Engineers, 2018,232(16):3108-3117.
[30]JIMENEZ B G,SINGH R. Effect of duct-rotor aerodynamic interactions on blade design for hover and axial flight[R].AIAA-2015-1030,2015.
[31]AKTURK A,CAMCI C. A computational and experimental analysis of a ducted fan used in VTOL UAV" systems[C]// European Turbomachinery Conference. 2011.
[32]ZHOU Y, HUANG G, XIA C. Analysis of fixed-wing VTOL aircraft with gas-driven fan propulsion system[J]. Aerospace Science and Technology,2020, 104(6):105984.
[33]ZHAO H ,BIL C. Aerodynamic design and analysis of a VTOL ducted-fan UAV[R]. AIAA-2008-7516, 2008.
[34]苏运德, 徐林程, 叶正寅. 一种共轴式涵道风扇无人机的研制[J].航空科学技术,2014,25(3):40-44.
[35]王春阳, 周洲, 王睿, 等. 涵道式垂直起降固定翼无人机纵向稳定性研究[J].西北工业大学学报,2021, 39(4):712-720.
[36]郑志成, 周洲, 昌敏, 等. 升力风扇垂直起降飞机阻力特性分析[J].西北工业大学学报,2012,30(1):6-10.
[37]李满, 宋笔锋, 华鑫, 等. 升力风扇垂直起降无人机死重分析[J].飞行力学,2016,34(1):51-58.
[38]THOUAULT N,GOLOGAN C,BREITSAMTE C.et al.Aerodynamic investigations on a generic fan-in-wing con-figuration[C].26th Congress of the Internatiobal Council of the Aeronautical Sciences,2008.
[39]王红波, 祝小平, 周洲, 等. 垂直起降飞机新型气动布局设计分析[J].西北工业大学学报,2017,35(2):189-196.
[40]FOOTOHI P,BOUSKELA A,SHKARAYEV S.Aerodynamic characteristics of the blended-wing-body VTOL UAV[J].Journal of Aerospace Engineering and Mechanics,2020,4(1):187-200.
[41]CULPEPPER G G, CAI J, GUNASEKARAN S. Effect of forward propeller tilt and inlet shape in propeller-in-wing thrust vectoring[R].AIAA-2021-1359,2021.
[42]LIOU M F, GRONSTAL D, KIM H J, et al. Aerodynamic design of the hybrid wing body with nacelle: n3-x propulsion-airframe configuration[R].AIAA-2016-387, 2016.
[43]张阳, 周洲, 王科雷, 等.分布式动力系统参数对翼身融合布局无人机气动特性的影响[J].西北工业大学学报,2021,39(1):17-26.
[44]PANAGIOTOU P,DIMOPOULOS T,DIMITRIOU S, ET AL.Quasi-3d aerodynamic analysis method for blended-wing-body uav configurations[J]. Aerospace, 2021,8:13.
[45]WANG K, ZHOU Z. Aerodynamic design,analysis and validation of a small blended-wing-body unmanned aerial vehicle[J]. Aerospace,2022,9:36.
[46]POPOVI L S,PAUNOVI L D,ILAS V S,et al.Design of the uav aerodynamics in multiple stages[J].Science Technical Review, 2020, 170(2):9-16.
[47]STAHL P, RÖßLER C, HORNUNG M. Benefit analysis and system design considerations for drag reduction of inactive hover rotors on electric fixed-wing vtol vehicles[R].AIAA-2018-4150,2018.
[48]STAHL P, SEREN T, RLER C, et al. Development and performance comparison of optimized electric fixed-wing VTOL UAV configurations[C]// 31st Congress of the International Council of the Aeronautical Sciences,2018.
[49]朱秋娴, 招启军, 林永峰, 等.倾转旋翼机多部件对机翼气动干扰的分析及优化[J].航空动力学报,2017, 32(6):1505-1514.
[50]HOLSTEN J,OSTERMANN T,MOORMANN D,et al. Design and wind tunnel tests of a tiltwing UAV[J]. Ceas Aeronautical Journal, 2011, 2:69-79.
[51]祝小平, 王睿, 周洲. 垂直起降固定翼飞翼布局无人机过渡飞行纵向稳定性研究[J].西北工业大学学报,2011, 29(4):548-553.
[52]OSTERMANN T,HOLSTEN J,DOBREV Y,et al.Control concept of a tiltwing uav during low speed maneuvering[C]// Proceeding of the 28th International Congress of the Aeronautical Sciences:ICAS Brisbane,Australia,2012.
[53]HOLSTEN J, OSTERMANN T, DOBREV Y, et al. Model validation of a tiltwing UAV in transition phase applying wind tunnel investigations[C]//Congress of the International Council of the Aeronautical Sciences,2012.
[54]FREDERICKS W J, MOORE M D, BUSAN R C. Benefits of hybrid-electric propulsion to achieve 4x cruise efficiency for a VTOL UAV[C]// 2013 International Powered Lift Conference,2013.
[55]刘威威. 垂直起降无人机气动布局和结构设计分析[D].郑州:郑州航空工业管理学院,2023.
责任编校:田 旭,刘 燕
Research Progress on Aerodynamic Configuration Design of Vertical"Take-off and Landing UAVs
WANG Xiaolu1,LIU Weiwei2,ZHOU Chong1,LI Guanghao1
(1.School of Aerospace Engineering ,Zhengzhou University of Aeronautics,Zhengzhou 450046,China;
2.Henan Civil Aviation Development and Investment Group Co.,Ltd.,Zhengzhou 450000,China)
Abstract: The vertical take-off and landing UAV is a hotspot in aerospace engineering. In this paper, the working principles and typical models of three types of vertical take-off and landing UAVs, including tilt rotor, tilt duct and dual system, are introduced. The aerodynamic performance and design research progress are analyzed and discussed. The research suggestions on aerodynamic configuration design and optimization, flight control, crosswind effect and structural lightweight design of vertical take-off and landing UAV are put forward as well.
Key words:vertical take-off and landing UAV;electric vertical take-off and landing; aerodynamic configuration design; crosswind effect; flight stability
基金项目:河南省科技攻关计划项目(232102220029);郑州航空工业管理学院科研平台开放基金(ZHKF-230201)
作者简介:王晓璐,男,河南商城人,博士,教授,研究方向为飞行器设计。
