
面向区域化管理的垃圾中转平台设计
2024-10-10 00:00:00胡毅王玉勤周路祥邵家乐朱庆卓
河南科技 2024年17期






摘 要:【目的】为有效解决城市化进程推进带来的垃圾清运问题,提出了面向区域化管理的垃圾中转平台设计方案。【方法】为打造高性能的垃圾区域化管理网络,通过SolidWorks软件对垃圾中转平台的主要机构进行三维建模,利用Simulation模块对平台关键零部件进行有限元分析,验证设计的合理性。【结果】计算结果显示,装置性能满足设计要求。【结论】该平台的设计将为现代城市和社区的垃圾管理提供清洁、绿色和智能化的解决方案,具有良好的应用前景。
关键词:区域化管理;垃圾中转平台;Simulation模块;有限元分析
中图分类号:TH137.5 文献标志码:A 文章编号:1003-5168(2024)17-0024-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.17.005
Design of Garbage Transfer Platform for Regional Management
HU Yi1 WANG Yuqin1 ZHOU Luxiang1,2 SHAO Jiale1 ZHU Qingzhuo1
(1.School of Mechanical Engineering, Chaohu University,Hefei 238024, China;
2.School of Mechanical Engineering, Anhui Polytechnic University, Wuhu 241000, China)
Abstract: [Purposes] In order to effectively solve the problem of garbage removal caused by urbanization, a design scheme of garbage transfer platform oriented to regional management is proposed. [Methods] In order to build a high-performance garbage regional management network, the main institutions of the garbage transfer platform were modeled by SolidWorks software. The Simulation module is used to analyze the key components of the platform by finite element method to verify the rationality of the design. [Findings] The calculation results show that the performance of the device meets the design requirements. [Conclusions] The design of this platform will provide a clean, green and intelligent solution for waste management in modern cities and communities, which has a good application prospect.
Keywords: regional management; garbage transfer platform; Simulation module; finite element analysis
0 引言
由于城市化进程的加速推进,城市生活垃圾持续增加,而垃圾处理能力却相对不足,导致一些地区面临“垃圾围城”的困境[1]。同时,现有的垃圾处理设施普遍存在建设水平偏低、运行质量较差、配套设施不齐全等问题,存在一定的污染隐患。如何高效地开展垃圾清运和回收工作已经成为当前社会面临的一个重要问题[2-3]。
随着科技的不断发展,清洁行业也逐步向智能化转变,研究的方向也主要集中在高性能、自动化的清洁装置开发上。甘天祥[4]基于Wi-Fi自组网技术搭建设备通信网络,提出分类运输和清运监管的垃圾智能清运模式;余赞等[5]基于Android系统开发出垃圾分类管理操作平台;王珺等[6]利用传感器和物联网技术对高校园区垃圾集中处理站点进行智能化设计,实现垃圾站点自动满桶更换、数据监控、联网管理等功能;王聪[7]结合计算机视觉技术、物联网技术,构建了一套城市生活垃圾管理系统,能够有效应对城市生活垃圾回收处理难的困境。这些研究在垃圾清运、回收、管理的网络建设方面取得了一定的进展,并为该领域的后续研究提供了重要的参考价值。
鉴于当前社会对垃圾清运管理网络和智能化清洁设施的迫切需求,本研究开发了一个基于区域化管理的垃圾中转平台。该平台由智能化垃圾清运硬件设施和管理网络系统构成,并结合了视觉图像处理技术和路径规划技术,可以实现垃圾的自主分类与收集,并合理规划垃圾运输路径,为高效率、低成本的垃圾清运管理提供了有效的解决方案。
1 工作原理
当垃圾中转平台开始运行时,视觉识别模块可以实时捕捉垃圾收集点的图像,并识别不同类型的垃圾。垃圾转运车对垃圾进行分类,机械臂自动抓取垃圾并将其放置到垃圾仓中[8-9]。通过采集垃圾收集点的位置数据,利用路径规划技术,可以生成最佳的垃圾收集路径,使垃圾转运车按照优化后的路径依次前往目标中转站。当垃圾转运车到达中转站时,根据垃圾类型进行分类投放。智能中转站配备了数据管理平台,可以实时记录垃圾转运车的位置信息、站内垃圾箱的填充情况及站内空气质量等数据,并对数据进行整合处理。根据检测到的垃圾填充数据,平台可以为垃圾转运车设计出最佳运输路线。除此之外,中转站可根据数据管理平台反馈的空气质量信息,适时开启站内净化装置,通过UV-C紫外线照射灯和活性炭过滤器对站内进行杀菌消毒,从而去除异味。经过这一系列流程,就可以高效地完成垃圾的处理工作。
2 装置设计方案
2.1 垃圾中转平台设计
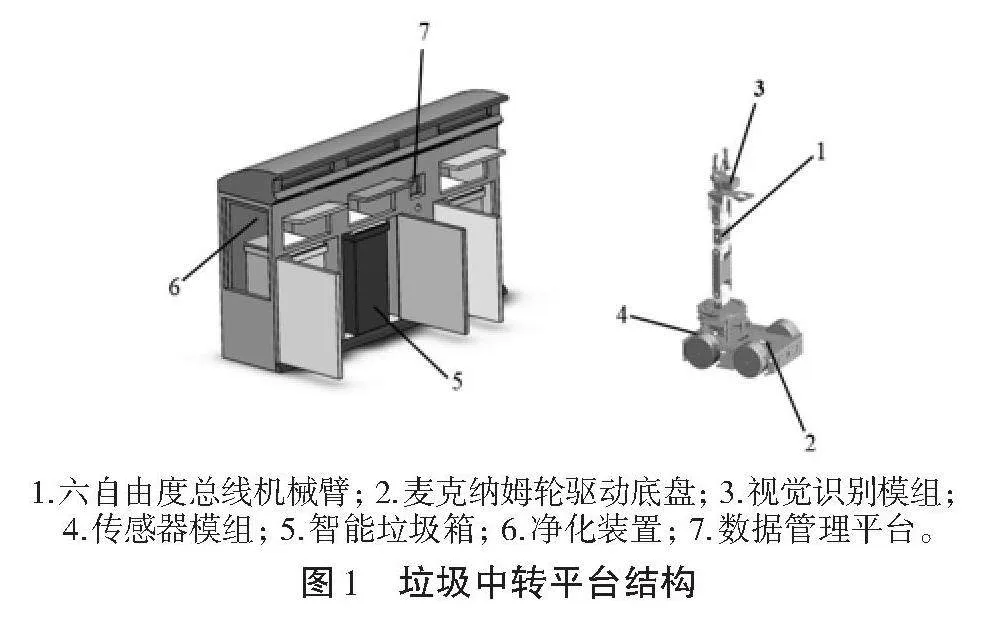
垃圾中转平台主要由基于视觉识别的垃圾转运车和智能垃圾中转站构成,其主要结构如图1所示。垃圾转运车由六自由度总线机械臂、麦克纳姆轮驱动底盘、视觉识别模组和传感器模组等组成。智能垃圾中转站由智能垃圾箱、净化装置和数据管理平台组成。
<E:\2023田田\10-\河南科技202417\Image\image1_12.png>
2.2 六自由度总线机械臂设计
六自由度总线机械臂是一种基于通信技术,可以在三维空间进行灵活运动和操作的装置,其结构如图2所示。六自由度总线是一种用于机器人和自动化系统的通信协议,可以实现多个设备之间的数据高速传输和控制。六自由度总线机械臂可以实现沿X、Y、Z轴方向的平移运动和绕X、Y、Z轴的旋转运动,从而确保机械臂能够在三维空间内进行精确的位置控制和姿态控制,实现复杂的任务操作[10]。机械臂搭载了总线马达驱动模块,该模块通过UART串口信号即可完成电机转速和旋转方向的控制;单总线通信协议则可以实现一根信号,完成对所有设备的控制。
2.3 驱动底盘设计
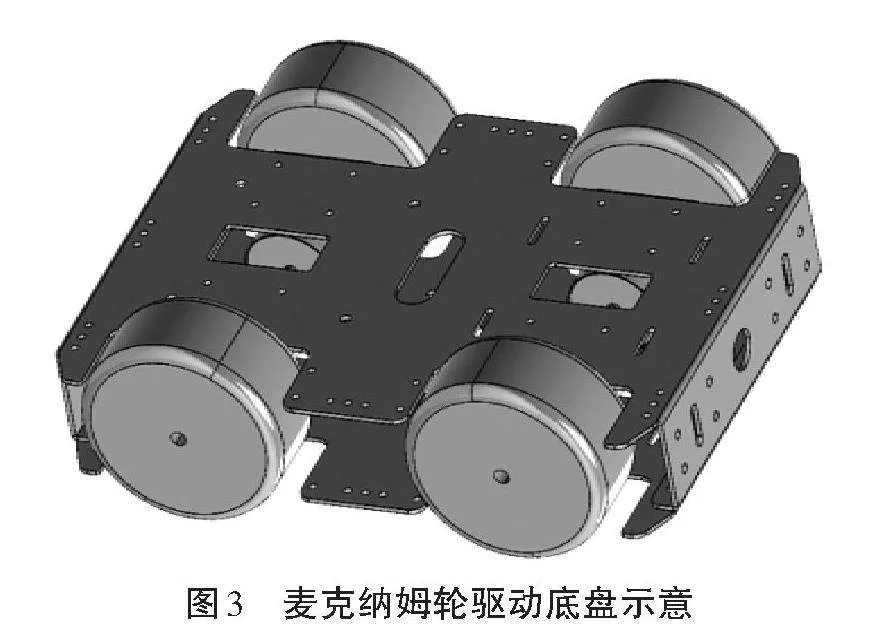
驱动底盘采用麦克纳姆轮驱动技术,配备了超声波传感器、循迹传感器和光敏传感器等模块,从而具备环境感知和导航能力 [11]。麦克纳姆轮驱动底盘结构如图3所示。
该驱动底盘具有良好的操控性和灵活性,能够实现平稳移动和精准转向。底盘上安装有电机、减速器和控制器等驱动系统组件,并搭载传感器套组,可以实现智能避障、智能循迹、定距跟随等功能。超声波传感器用于测量底盘与障碍物之间的距离,实现环境感知和避障功能。传感器通过发射超声波脉冲,可以精准测量障碍物的距离。循迹传感器通过感知地面上的特定标记或线路来确定位置。底盘上的循迹传感器会跟随标记或线路进行检测,根据检测结果调整底盘的运动方向和速度,其检测原理如图4所示。
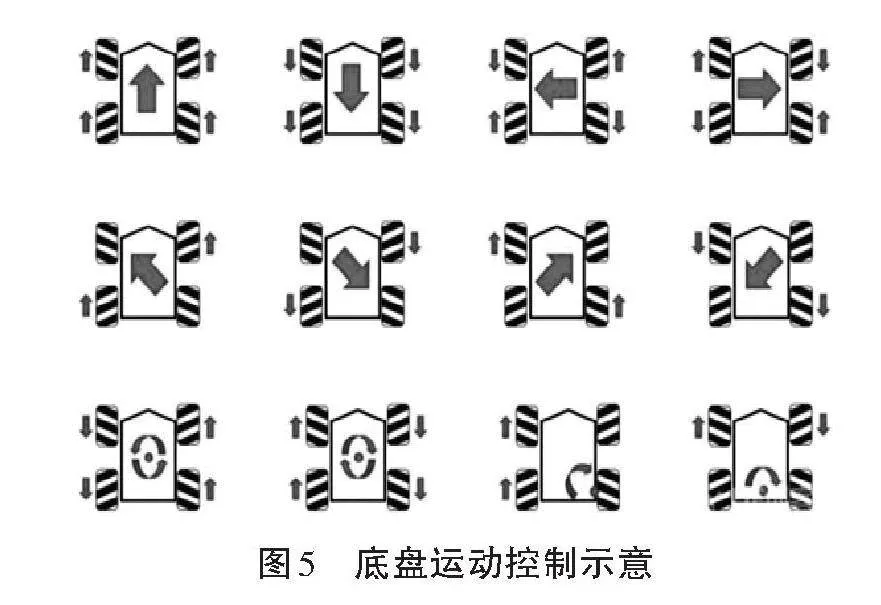
底盘控制系统由中央控制器和分布式控制器组成。中央控制器负责规划设备整体的运动路径。各个驱动单元和传感器由对应的分布式控制器单独控制。底盘控制系统的运行过程如图5所示。
2.4 智能垃圾中转站设计
智能垃圾中转站是由智能垃圾箱、净化装置和数据管理平台等组成,其结构如图6所示。
智能垃圾箱配备了视觉识别模组,可根据识别算法,提取物品关键特征,从而判断是否有垃圾被投放,并确定出投放位置。中转站拥有一套独立的自动控制系统,用于控制合盖的打开和关闭。当视觉识别模组检测到有垃圾投放时,自动控制系统会启动电机打开合盖,垃圾投放完成后关闭合盖。为确保垃圾投放的及时性,可以调节合盖动作的灵敏度。
为解决智能中转站中产生的异味和细菌滋生的问题,中转站设计了净化装置。净化装置主要由UV-C紫外线照射灯和活性炭过滤器组成。UV-C紫外线照射灯利用辐射紫外线照射垃圾站内的空气和表面,杀死细菌和病毒,达到消毒的效果。在站内布置活性炭过滤器可以吸附和中和异味分子,减少站内的异味。同时,净化装置配备了定时功能,可以按照预设的时间自动启动和关闭。为了降低能耗,数据管理平台可以对垃圾站内的空气质量进行实时监测,当检测到异味或污染物超过预设阈值时,自动启动消毒除味装置。
3 有限元分析评估
承重板是轮式运输车重要的载荷部件,承重板在负载状态下的位移、变形、屈服极限和固有频率等结构性能必须符合设计要求。利用SolidWorks软件中的Simulation模块对承重板进行静力学性能分析。
3.1 建立分析模型
选取材料:承重板使用合金钢材质,该材料具耐腐蚀、韧性强和强度高等特性,其主要材料属性见表1。
设置约束条件:约束条件主要包括零件固定和施加载荷。对承重板中心圆孔内壁采用固定约束,并在承重板内腔底面及四周分别施加800 N的力。
网格规划:对承重板模型进行高品质实体网格划分。网格的单元总数为7 486,节点总数为15 946,雅可比点数为4。其中,单元大小设置为2.079 39 mm,公差设置为0.103 969 mm。承重板网格划分如图7所示。
3.2 静应力模组求解
通过应用赫兹接触理论可以计算得到承重板的最大位移量和最大应力[12]。将计算结果与软件求解结果进行比对,即可判断承重板是否满足设计要求。静应力的计算见式(1)。
[σmax=0.578FR21-V21E1+1-V22E223δmax=0.826F2R1-V21E1+1-V22E223] (1)
式中:[σmax]表示最大应力值;[δmax]表示最大位移量;[F]表示法向力;[R]表示曲率半径;[V1]和[V2]表示泊松比;[E1]和[E2]表示弹性模量。
通过Simulation模块的静应力分析模组,求解得到承重板应力、位移计算结果如图8所示。
由式(1)计算得到σmax为6.204e+008 N/m2,δmax为3.667e+002 mm。静应力分析模组运算所得最大应力值为1.613e+007 N/m2,最大位移量为2.917e+002 mm。承重板的最大应力数值和最大位移量模拟运算结果均在设计许用范围内,故承重板应力满足设计要求。
3.3 频率分析模组求解
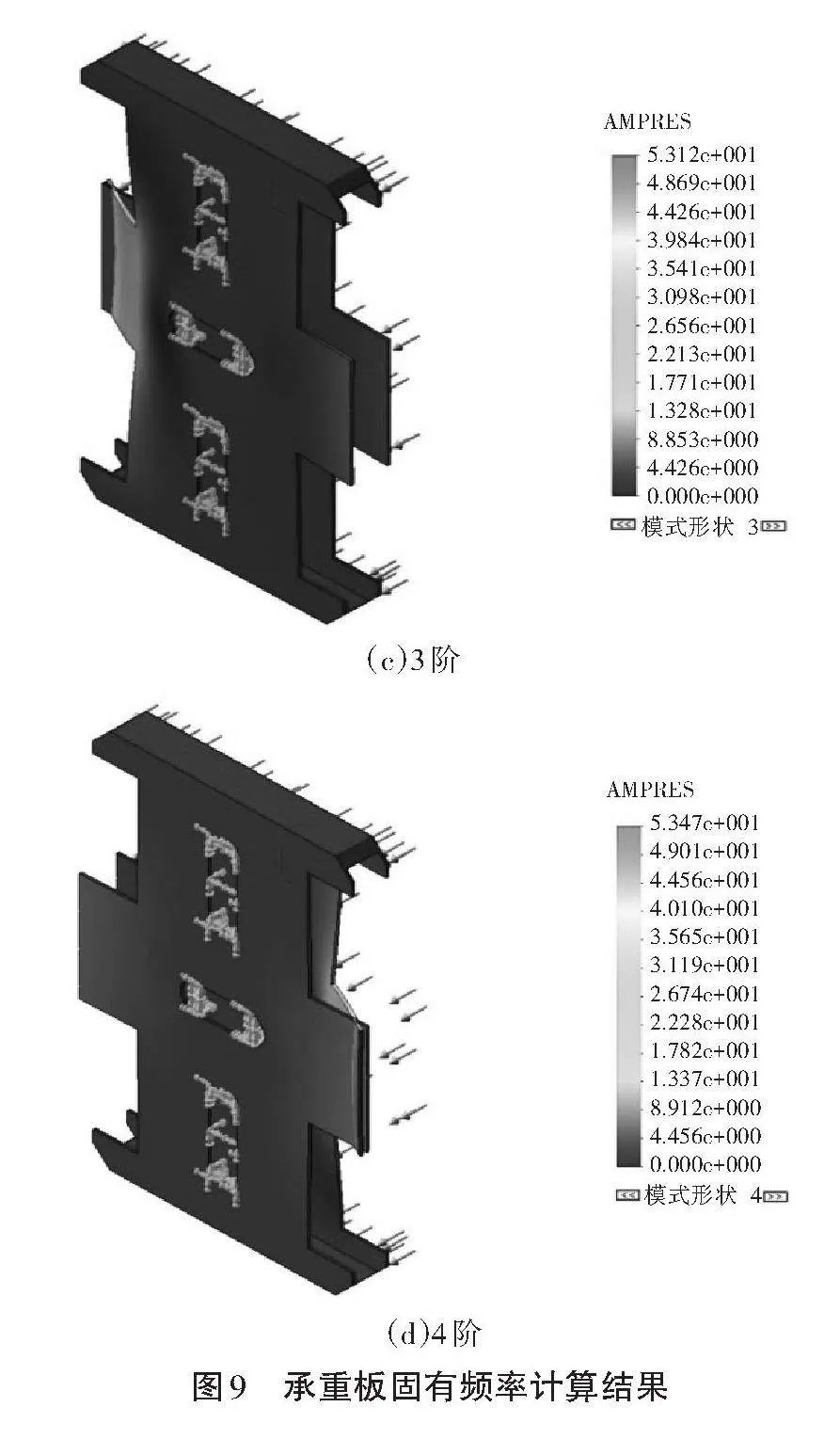
为避免运输车驱动装置和承重板在工作过程中产生共振现象,导致机械结构损坏和功能失效,需计算承重板固有频率[13]。承重板1~4阶的固有频率计算结果如图9所示。
由图9可知,承重板1~4阶的固有频率分别为1 463.9 Hz、1 470.1 Hz、1 472.5 Hz和1 473.9 Hz。当设备工作时,产生的振动频率只要保持在这一范围内,就可以有效避免发生共振现象,从而降低安全事故风险。
4 结语
本研究提出了一种面向区域化管理的高性能垃圾清运、回收、管理的网络设计方案。该方案涵盖了清运硬件设施和网络性能服务,融合了视觉图像处理和路径规划技术,实现了垃圾的自动分类收集和运输路径的智能规划,旨在提高清运效率并降低成本。并且,本研究构建了垃圾中转平台的三维结构模型,并针对主要部件进行了结构设计。利用SolidWorks的Simulation模块对承重板进行了静应力分析。结果表明,承重板的最大应力值和最大位移量均在合理范围内,其结构性能满足设计要求。此外,通过频率分析模块,计算得出了承重板工作时的固有频率范围,为设计提供了重要参考。路径规划模块的设计有效解决了垃圾转运车辆在收集点和中转站间的行驶混乱问题,进一步提升了清运效率。垃圾中转平台的设计不仅为现代城市和社区的垃圾管理提供了一种先进的解决方案,而且对建设清洁、绿色、智能化的城市环境具有重要意义,展现出广阔的应用前景。
参考文献:
[1]张庆霞,呼军艳.环境政策对公众垃圾分类行为的影响路径分析[J].环境保护与循环经济,2023,43(12):10-15.
[2]李梓嫣.城市生活垃圾分类公共管理研究[J].合作经济与科技,2023(12):172-174.
[3]张郁媛.城市生活垃圾分类收集智能化应用进展及对策研究[J].智能建筑与智慧城市,2023(9):19-22.
eGv4lKpJLOg2hfXsROqs7Sx1niSZwj57CRRGV93vpzk=[4]甘天祥.智能网联垃圾分类清运管理系统设计与开发[D].武汉:江汉大学,2022.
[5]余赞,李叶萱,高靖棠,等.基于Android的垃圾分类管理系统设计与实现[J].电脑编程技巧与维护,2023(4):64-66.
[6]王珺,苏俊恺,翁小洁,等.高校园区垃圾分类站点智能管理系统模型设计探讨:基于PLC技术基础的研究[J].海峡科技与产业,2022,35(4):57-59.
[7]王聪.基于计算机视觉技术的城市生活垃圾管理系统[D].重庆:西南大学,2022.
[8]郭佳涛,陈申锐,张佳涛,等.基于人工智能的垃圾分类解决方案的设计[J].电脑知识与技术,2023,19(21):18-20.
[9]李红斌,裴永亮.STEM教育理念下高中生基于项目学习的模式探究:以制作“智能垃圾分类机器人”为例[J].中国信息化,2023(6):91-92.
[10]姜浩.绳驱动仿人机械臂机构设计和运动分析[D].广州:广东工业大学,2020.
[11]付晓云.基于Arduino典型传感器智能避障小车的设计开发[J].精密制造与自动化,2021(2):25-29.
[12]孔祥雨.4L20柴油机配气机构接触应力计算[D].大连:大连海事大学,2020.
[13]伍磊,腾凯,徐黄镇.基于SolidWorks的电梯检验运载机器人承重板有限元分析[J].机械研究与应用,2022,35(1):145-147.
收稿日期:2024-07-25
基金项目:国家级大学生创新创业项目“面向区域化管理的智能垃圾中转设施设计”(202410380030);安徽省传统专业改造提升项目“机械设计制造及其自动化专业改造提升”(2021zygzts039);安徽省虚拟仿真实验教学项目“数控加工虚拟仿真实验教学项目”(2021xnfzxm070)。
作者简介:胡毅(2004—),男,本科生,研究方向:机械制造。
通信作者:王玉勤(1985—),男,硕士,副教授,研究方向:机械系统测试与控制。
