
具有[H∞]性能的输入受限三级倒立摆控制器设计
2024-10-10 00:00:00韩光信张保葵
河南科技 2024年17期




摘 要:【目的】针对直线三级倒立摆控制输入受限下的稳摆控制问题,设计了具有H∞性能的输入受限三级倒立摆控制器。【方法】利用线性矩阵不等式(LMI)方法,将控制输入约束问题转化为利用线性矩阵不等式求解优化值的优化问题,经Lyapunov稳定性推导出符合条件的LMI,利用MATLAB中的LMI工具箱求解得到有效的K。进一步在控制输入受限下引入H∞性能指标,使所设计的控制输入受限下的算法具有H∞性能。【结果】仿真结果表明,该控制器对于控制输入受限下的复杂高阶次不稳定系统具有很好的控制效果。【结论】控制输入信号在给定的受限范围内实现了三级倒立摆的稳摆要求,且引入H∞性能指标后控制输入和摆杆波动更小。
关键词:直线三级倒立摆;控制输入受限;线性矩阵不等式(LMI);H∞性能指标
中图分类号:UTP273 文献标志码:A 文章编号:1003-5168(2024)17-0004-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.17.001
Design of Input Constrained Triple Inverted Pendulum Controller with H∞ Performance
HAN Guangxin ZHANG Baokui
(College of Information and Control Engineering, Jilin of Chemical Technology, Jilin 132022, China)
Abstract: [Purposes] To solve the stabilization control problem of triple inverted pendulum with control input constraint, an input constrained control strategy with H∞ performance is proposed.[Methods] By using linear matrix inequalities(LMI), the control input constraint problem is transformed into an optimization problem using LMI to solve the optimization value. A suitable LMI is obtained by Lyapunov stability derivation, and an effective K is obtained by using the LMI toolbox in MATLAB. Furthermore, H∞ performance index is introduced to make the designed algorithm with control input constraint have H∞ performance. [Findings] The simulation results show that the control strategy has a good control effect on the complex high-order unstable system with control input constraint. [Conclusions] The control input signal can achieve the stability requirement of the triple inverted pendulum within the given limited range, and the fluctuation of the control input and pendulum rod is less after the introduction of H∞ performance index.
Keywords: linear triple inverted pendulum; control input constraint; linear matrix inequality(LMI); H∞ performance
0 引言
控制输入受限问题[1]在实际的控制系统中是广泛存在的。由于其自身的物理特性而引起的执行机构饱和约束,例如,在汽车主动悬架控制系统[2]中,力发生器只能产生有限的作用力;在化工反应釜生产过程控制中,填料速率[3]不可能无限地快,必然要有个限度。因此,对于控制输入受限的研究[4-6]具有十分重要的现实意义。如果只考虑系统性能而忽略控制输入约束,那么在实际应用时极有可能会因执行机构限制而造成整个控制系统发散,进而导致整个控制系统失控。即使系统不发散,长时间高强度的振荡也会造成控制系统结构损坏,从而导致故障。在不超出规定的约束范围内,完成倒立摆的稳摆控制目标,对于诸多的实际控制系统来说,具有极为值得借鉴的现实意义。
对于控制输入受限的控制器设计方法分为两大类。一类为补偿器设计法[7]:即通过定义辅助系统,采用输入饱和误差动态放大的方法,可以实现一种基于控制输入抗饱和控制;另一类为直接法:即在设计控制器之时就考虑控制输入受限,使控制输入在给定的受限范围内完成稳摆控制目标。本研究采用直接法设计,将约束条件转化为线性矩阵不等式[8-9]的条件,求解出有效的控制器增益,使控制输入在给定的有限范围内实现对三级倒立摆的控制。
1 数学模型
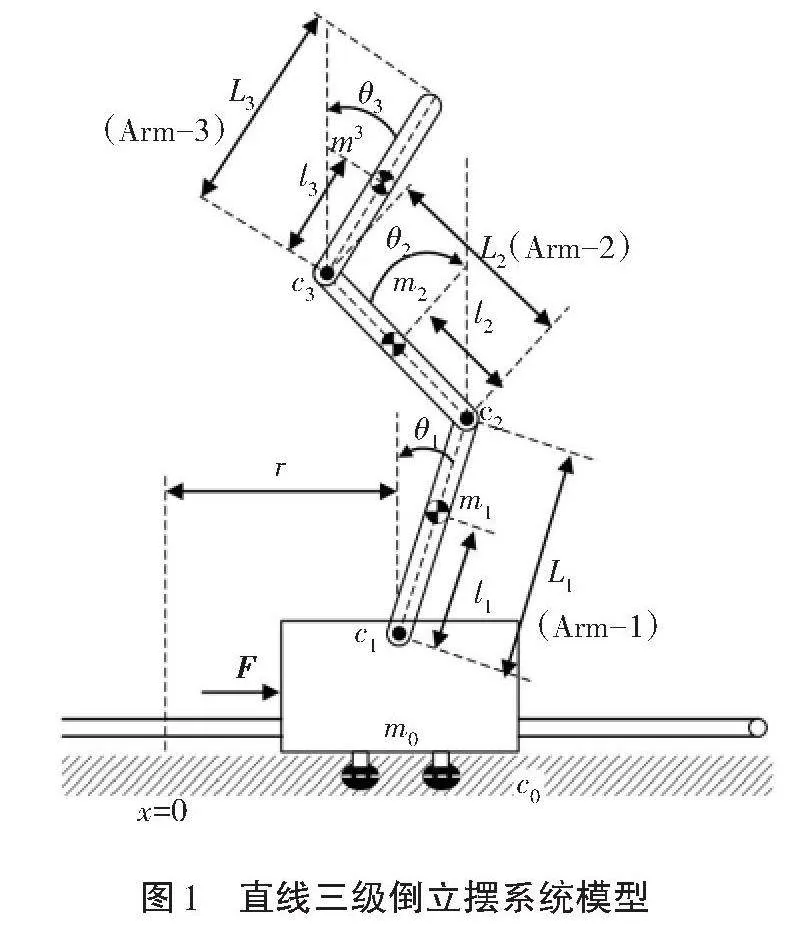
直线三级倒立摆系统简化模型如图1所示。在系统建模时定义摆杆正旋转方向为逆时针,小车位移的正方向为向右运动,以摆杆垂直位置为0。下摆杆离垂直位置的偏角为[θ1(t)],中摆杆离垂直位置的偏角为[θ2(t)],上摆杆离垂直位置的偏角为[θ3(t)]。
在对直线三级倒立摆系统应用拉格朗日力学[10]的方法进行建模时,分别列出小车、下摆、中摆、上摆、质量块1和质量块2这6个部分的动能和势能。之后构建拉格朗日算子,列写出拉格朗日方程,对所得到的微分方程组化简后,即可得到三级倒立摆系统的非线性数学模型。
利用拉格朗日方程推导运动学方程,对于直线三级倒立摆系统,系统的总动能见式(1)。
[T=T0+T1+T2+T3+T4+T5] (1)
系统的总势能见式(2)。
[V=V0+V1+V2+V3+V4+V5] (2)
拉格朗日方程见式(3)。
[L=T-V] (3)
式中:[L]为系统的总动能与总势能之差。
在倒立摆系统进行建模时,在理想条件下(忽略摩擦和干扰),小车和摆杆相对于伺服电机而言,电压的拉格朗日方程的一般形式表示见式(4)。
[ddt∂L∂qi-∂L∂qi=Qi] (4)
式中:[qi]为广义坐标。
对于直线三级倒立摆系统,则存在的关系见式(5)。
[qi(t)T=x(t)θ1(t)θ2(t)θ3(t)] (5)
系统在[θ1(t)]、[θ2(t)]、[θ3(t)]方向上不受外力,在小车水平方向上受外力[F],且[F]为系统的控入输入量[u],则等式(6)成立。
[∂2L∂t∂x-∂L∂x=F=u∂2L∂t∂θ1-∂L∂θ1=0∂2L∂t∂θ2-∂L∂θ2=0∂2L∂t∂θ3-∂L∂θ3=0] (6)
对于直线三级倒立摆系统而言,其工作点是倒立摆系统保持在平衡状态下各个变量的值,在倒立摆处于平衡状态时,系统在平衡点处线性化,则有[sinθ≈0,cosθ≈1]。
假定系统保持竖直向上的平衡状态时,所有状态都取零,见式(7)。
[X=xθ1θ2θ3xθ1θ2θ3T=[00000000]T] (7)
将式(6)得到的微分方程组,在平衡点位置附近用Taylor Series展开并代入此刻状态变量的值,运用Mathematica科学计算软件进行计算,且取[x]作为输入,令控制输入量等于加速度,即[u=x]。系统的线性状态方程见式(8)。
[X=AX+BuY=CX] (8)
将倒立摆机械系统的结构参数值代入,即可得到三级倒立摆的线性数学模型,具体见文献[11]。
为了得到存在外部扰动不确定性因素的三级倒立摆数学模型,将小车与三级摆杆作为一个整体系统,外界扰动作为系统的输入,可以得出的结果见式(9)。
[x=u-wM] (9)
式中:[M]表示小车、三级摆杆和质量块的总质量;[w]表示系统的建模误差及外界输入扰动。
因此,可得到三级摆不确定性数学模型的状态空间方程见式(10)。
[X=AX+B1w+B2uY=CX] (10)
式中:[A=]
[00001000000001000000001000000001000000000159.504-38.435 60.784 64600000-127.957.9951-17.189000002.570 86-16.924 539.348 50000;]
[B1=0 0 0 0 -1 -6.649 04 0.158 31-0.003 182 11T];[B2=0 0 0 0 1 6.649 04 -0.158 31 0.003 182 11T];
[C=1000000001000000001000000001000000001000000001000000001000000001] 。
2 控制器设计与分析
2.1 具有H∞性能指标的输入受限下LMI控制器
根据三级倒立摆系统模型式(10),控制器设计见式(11)。
[u=KX] (11)
式中:[K=k1k2k3k4k5k6k7k8]。
控制目标为[t→∞]时,在控制输入满足[|u|⩽umax]条件下,使得[X→0]且[||Gzω(s)||∞<γ],把控制目标转化为LMI设计,推导得到具有H∞性能指标的输入受限下三级倒立摆控制结论见式(12)。
[AN+BF+NAT+FTBTBBT-γ2<0N>0, N=NTk0NFTF1≥0wX0TX0N≥0] (12)
通过式(12)构造的4个LMI,可求得具有H∞指标的控制输入受限下[12]有效的[K],其中:[P]是李雅普诺函数设计的正定矩阵,[F=KP-1],[N=P-1],[X0]是倒立摆系统初始状态,其余为待选参数。
2.2 具有H∞性能指标的LMI控制器设计分析
根据模型式(10)相当于在状态方程中加入扰动[d],模型可表示为式(13)。
[X=AX+Bu+dY=CX] (13)
设计的Lyapunov函数见式(14)。
[V=XTPX] (14)
其中[P>0]为8×8阶正定矩阵,通过P的设计可有效调节X的收敛效果。
[V=XTPX+XTPX=(AX+Bu+Bd)TPX+XTP(AX+Bu+Bd)=(AX+BKX+Bd)TPX+XTP(AX+BKX+Bd)=XT(A+BK)TPX+XTP(A+BK)X+(Bd)TPX+XTP(Bd)=XTQT1X+XTQ1X+(BTPX+XTPB)d=XTQX+(BTPX+XTPB)d]
(15)
式中:[Q1=P(A+BK)],[Q=QT1+Q1]。
[令η=XTdT,则η=Xd, ηT=XTd]
从而得到式(16)和式(17)。
[XTQX=XTdQ000Xd]
[=ηTQ000η] (16)
[BTPX+XTPBd=dBTPXTPBXd=XTd0PBBTP0Xd=ηT0PBBTP0η] (17)
即:
[V=XTQX+ηT0PBBTP0η=ηTQPBBTP0η] (18)
输出为 [Z=CX], 则H∞性能指标取式(19)。
[0tZTZdt<0tγ2d2(t)dt+V(0)]([γ>0]) (19)
由于式(20)和式(21),则得出式(22)。
[ZTZ-γ2d2=XTCTCX-γ2d2] (20)
[ηTCTC00-γ2η=XTdCTC00-γ2Xd]
[=XTCTC-γ2d2Xd=XTCTCX-γ2d2] (21)
[ZTZ-γ2d2=ηTCTC00-γ2η] (22)
从而[V+ZTZ-γ2d2=ηTQ+CTCPB(PB)T-γ2η] (23)
取[θ=Q+CTCPB(PB)T-γ2<0] (24)
则[V+ZTZ-γ2d2≤0] (25)
对上式积分,可得式(26)。
[V+0tZTZdt≤0tγ2d2dt+V(0)] (26)
假设[d]为递减的扰动信号,即积分有界扰动,取:
[0∞d2 dt≤γ-2vmax] (27)
由于[0tZTZdt≥0,则:]
[V(t/aLo1CNMnnqxDbHZQ/L0YiBjOVQrTAe/759T14Uw3oU=)≤w] (28)
其中[vmax +V(0)≤w]。
由[V(t)≤w]可得式(29)。
[Pmin ‖X‖2≤XTPX≤w] (29)
则收敛结果为式(30)。
[‖X‖2≤vmax+V(0)Pmin] (30)
将式(24)展开即可得到满足H∞性能指标的条件:
[PA+PBK+ATP+KTBTPPB(PB)T-γ2<0] (31)
左右两边同时乘[P-1001]
[AP-1+BKP-1+P-1AT+P-1KTBTBBT-γ2<0] (32)
令[F=KP-1,][ N=P-1]。由式(32)可化为LMI设计形式,得到第一个LMI,见式(33)。
[AN+BF+NAT+FTBTBBT-γ2<0] (33)
根据[P]的定义可设计第二个LMI,见式(34)。
[N>0, N=NT] (34)
2.3 控制输入受限下LMI控制器设计分析
由于[V(0)=X0TPX0],如果存在正定矩阵P和[w>0,]使得[X0TPX0≤w]成立,则可保证[V(0)≤w],从而[V(t)≤w]。
取[KTK⩽w-1u2maxP],由[u=KX]可得式(36)。
[u2=(KX)TKX=XTKTKX≤XTw-1u2maxPX=w-1u2maxV≤u2max] (35)
则 [|u|⩽umax] (36)
通过上述理论分析,可以构造线性矩阵不等式见式(37)。
[KTK-w-1u2maxP≤0] (37)
由于不等式(37)中含有非线性项,必须转化为线性矩阵不等式才能求解。故取[k0=w-1u2max],则有式(38)。
[KTK≤k0P] (38)
根据Schur补定理[13],假设[C]为正定矩阵,则[A-BC-1BT≥0]等价于[ABBTC≥0],则有式(39)。
[k0PKTK1≥0] (39)
式(39)左右两边同时乘[P-1001],则有式(40)。
[k0P-1P-1KTKP-11≥0] (40)
[取F=KP-1, N=P-1]根据式(40)可得到第三个LMI,见式(41)。
[k0NFTF1≥0] (41)
要满足[X0TPX0≤w],根据Schur补定理,可以将其设计为第四个LMI,见式(42)。
[wX0TX0N≥0] (42)
通过式(33)、式(34)、式(41)、式(42)构造的4个LMI,可求得具有H∞指标的控制输入受限下有效的[K]。
3 仿真结果
采用Matlab中的LMI工具箱—YALMIP求解倒立摆初始值为小车位置-0.5 m,上摆杆、中摆杆、下摆杆分别为-0.2 rad、0.1 rad、0.1 rad。控制器参数为[w=1.0、α=2.0、γ=0.5][umax=20]。即可得到H∞指标的控制输入受限控制器反馈增益:[K =0.1118 ]
[-106.8847 90.4163 -132.2230 0.3735 -4.8538 ][8.1204 -19.8516]。
对比算法选用H∞控制器[14-15]实现三级倒立摆稳摆控制目标可以看出控制输入不满足限制的要求,采用直接法线性矩阵不等式技术可以直接考虑控制输入,使控制输入在给定的受限范围内对直线三级倒立摆达到稳摆控制的要求。为了进一步对比出效果,H∞控制器的控制输入利用限幅模块对其进行压缩,压缩到20.5 v系统已发生变形,再压缩系统将发散变得不稳定,无法达到期望的控制输入20 v条件下稳摆的控制目标。控制输入约束下LMI控制器则可以使控制输入在期望的受限范围内完成控制目标,加入H∞指标控制输入约束LMI控制器也可以在控制输入被限制的范围内完成稳摆的控制目标且摆杆具有更小的波动,仿真实验过程如图2至图6所示。
4 结论
针对直线三级倒立摆高阶次欠驱动系统控制输入受限下的控制问题,本研究基于线性矩阵不等式采用直接法解决控制输入受限问题,推导出考虑控制输入受限时的LMI,利用LMI工具箱求解出有效的K,使三级倒立摆在保证控制输入在期望范围内完成稳摆控制目标,再进一步引入H∞性能指标使摆杆和控制输入在波动上更为平稳,有更为优越的控制性能。经仿真实验验证所提控制算法的有效性,控制输入受限下和引入H∞指标控制输入约束LMI控制器均达到了控制输入信号在给定的受限范围内对直线三级倒立摆稳摆的控制要求,也进一步说明了线性矩阵不等式对于解决高阶次复杂非线性系统控制方面的有效性。
参考文献:
[1]ZHAO W,LIU Y,YAO X Q.Pde-based boundary adaptive consensus control ofmultiagent systems with input constraints[J].IEEE Transactions on Neural Networks and Learning Systems,2023.
[2]贾俊茹,郑黎明,张镇.汽车非线性主动悬架系统的自适应事件触发控制[J].汽车安全与节能学报,2023,14(4):439-447.
[3]袁建华,陈庆,刘力溥.基于催化剂与变进料比控制的化工生产反应速率及转化率的研究[J].三峡大学学报(自然科学版),2018,40(4):74-78.
[4]LI B,YONG K,CHEN M, et al. Flexible performance‐based adaptive fault‐tolerant attitude tracking control for input‐constrained satellite[J].International Journal of Adaptive Control and Signal Processing,2023,37(12):3193-3211.
[5]贺战胜,邱宏凌,沈俊.输入受限下无人直升机自适应固定时间滑模控制[J/OL].控制与决策:1-9[2024-05-17].https://doi.org/10.13195/j.kzyjc.2023.1354.
[6]韩光信,付伟,刘冬.控制输入受限的四水箱系统分布式预测PI控制[J].吉林化工学院学报,2019,36(9):51-53.
[7]路莹昕,韩光信.输入受限的倒立摆系统变结构PID控制研究[J].河南科技,2019(16):37-38.
[8]吕申,武俊峰.基于LMI优化的鲁棒控制器设计[J].工业仪表与自动化装置,2017(3):123-125,128.
[9]甄玉婕,王天成.基于LMI的不确定随机时滞系统输出反馈保性能控制[J].鲁东大学学报(自然科学版),2023,39(2):146-152.
[10]BAEK J, LEE C, LEE Y S, et al. Reinforcement learning to achieve real-time control of triple inverted pendulum[J].Engineering Applications of Artificial Intelligence, 2024, 128: 107518.
[11]齐心舒.智能控制算法设计及倒立摆实现[D].呼和浩特:内蒙古大学,2018.
[12]陈虹,韩光信,刘志远.基于LMI的约束系统H∞控制及其滚动优化实现[J].控制理论与应用,2005(2):189-195.
[13]曾诚,冯林安.Schur补和矩阵不等式[J].贵阳学院学报(自然科学版),2011,6(2):12-14.
[14]夏炎,谢玮.基于鲁棒H∞理论的三级倒立摆控制系统研究[J].计算技术与自动化,2017,36(1):17-22.
[15]吴文波,李小华,程万胜.基于LMI三级倒立摆系统的H∞鲁棒控制[J].辽宁科技大学学报,2010,33(3):253-257.
收稿日期:2024-05-17
作者简介:韩光信(1971—),男,博士,教授,研究方向:欠驱动机器人运动控制、非线性控制、带约束控制、鲁棒控制。
通信作者:张保葵(1999—),男,硕士生,研究方向:倒立摆系统控制算法研究。
