
主动反射面控制系统单调协同设计方法探讨
2024-08-31 00:00:00张庆海赵亚楠刘圣乾林海波赵正旭
机械制造与自动化 2024年3期








摘 要:设计测控系统时,单个组件(硬件和软件)的选择需要考虑多种权衡。针对主动反射面控制系统多目标、多约束的设计问题,以电机选择为例,通过单调协同设计方法将控制问题嵌入到电机、促动器和反射面面板的协同设计问题中,将协同设计问题转化为多目标优化问题,计算Pareto前沿,得到功能映射到的最小反链资源。根据优化结果进行实验,实验结果验证了单调协同设计方法的准确性和实用性,对复杂系统的设计优化具有一定的指导价值。
关键词:协同设计;单调协同设计方法;多目标优化;Pareto前沿
中图分类号:TH122文献标志码:A文章编号:1671-5276(2024)03-0223-06
Reserch on Monotone Co-design Method of Active Reflector Control System
Abstract:When designing a measurement and control system, it is necessary to take multiple trade-offs into consideration in choosing a single component ( hardware and software ). Aiming at the multi-objective and multi-constraint design problem of active reflector control system, and taking motor selection as an example, the control problem is embedded into the codesign problem of motor, actuator and reflector panel by monotone codesign method. The co-design problem is transformed into a multi-objective optimization one, and the Pareto frontier is calculated to obtain the minimum anti-chain resource mapped to the function. According to the optimization results, experiments are carried out, and their results verify the accuracy and practicability of monotone co-design method, which has certain guiding value for the design optimization of complex systems.
Keywords:co-design;monotone co-design method;multi-objective optimization;Pareto frontier
0 引言
测控系统在设计时过于重视功能的实现,通常以功能划分的方式进行设计优化,不能兼顾软件运行结果的特殊性以及与已开发系统的功耗、计算能力、电磁兼容、性能和成本的权衡,而采用协同设计的设计方法可以兼顾并优化解决。
协同设计(co-design)的需求在国内外逐渐扩大,其中传感和控制的权衡占据了主导地位[1-6]。GUPTA等[7]通过随机选择的算法,计算最小化协同设计过程中传感器选择问题的协方差,TZOUMAS等[8]在此基础上研究了高斯控制策略与传感器协同设计问题,对传感、驱动和控制进行共同设计。TANAKA等[9]提出一种新的框架协同优化传感器的选择和控制。SOUDBAKHSH等[10]研究了传输信号丢失时控制系统的协同设计。易永胜[11]提出不确定性多学科稳健设计方法优化工程协同设计问题。汪浩等[12]提出通过虚拟调试数字孪生模型的方法对驱动控制系统进行优化设计。谢冰川等[13]探讨了电机控制在不同学科下协调策略和耦合形式,提出电机优化面临的主要挑战是缺乏集成化的电机优化平台。杨丽丽等[14]通过协同优化组合算法获取Pareto最优解集,为实际工程中复杂结构优化问题提供参考。复杂网络与可视化研究所在中标麒麟国产操作系统中创建了FAST的三维模型,为反射面控制系统的设计奠定了基础[15-18]。李爱华等[19]总结前人经验,提出主动反射面控制系统设计时在满足基本功能的前提下,还要综合考虑电磁兼容、可靠性、稳定性及功耗等各方面因素。现有的系统设计突出了权衡,需要综合制定和解决涉及控制的协同设计问题,降低优化设计中的耗时与繁琐。
1 单调协同设计理论
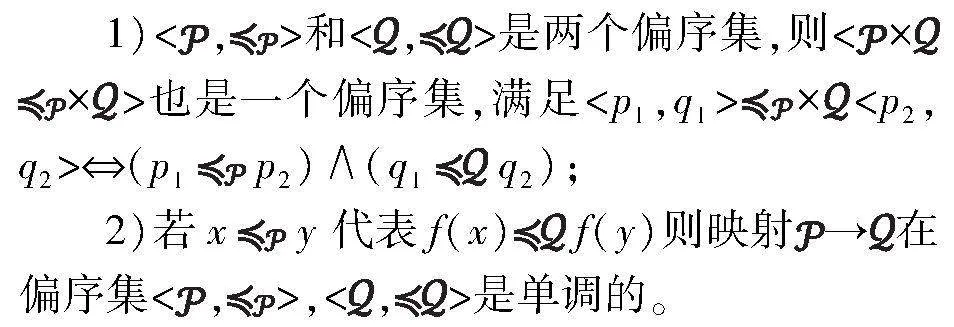
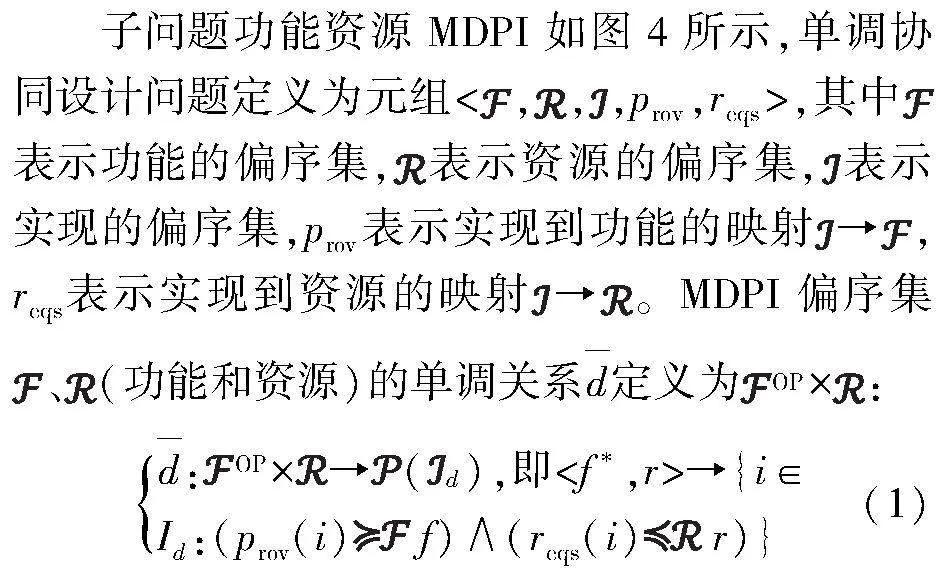
单调协同设计[20](monotone co-design)理论来源于序数理论。序数理论是数学的一个分支,使用二元关系(如大于、优于)来研究顺序的直观概念,其中:
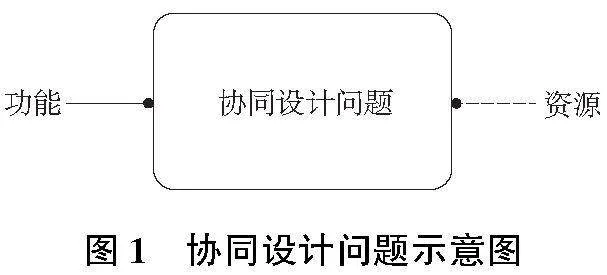
偏序关系可以建成拓扑图,全序集合叫链(可以通过链来完全表示偏序关系),如果偏序集中不存在任何可比的两个元素,称之为反链。
2 主动反射面系统设计
主动反射面系统的设计涉及到硬件组件(如传感器、计算单元CPU、执行器)和软件组件(感知、规划、状态监测、控制程序)的选择。结合单调协同设计理论探讨主动反射面控制系统的设计方法,将其中每个组件单元形式化为一个单调设计问题(monotone co-design problem,MCDP),以组件间的控制性能、尺寸、质量、功耗(size weight and power,SWAP)和成本作为约束关系,分析复杂设计的单调性,得到设计方案的Pareto前沿。在天眼模型数字孪生虚实联动项目平台研究中应用,以电机、促动器、反射面面板三者协同设计以及电机选择详细说明控制模型在系统中协同设计优化问题。
2.1 设计方法构建
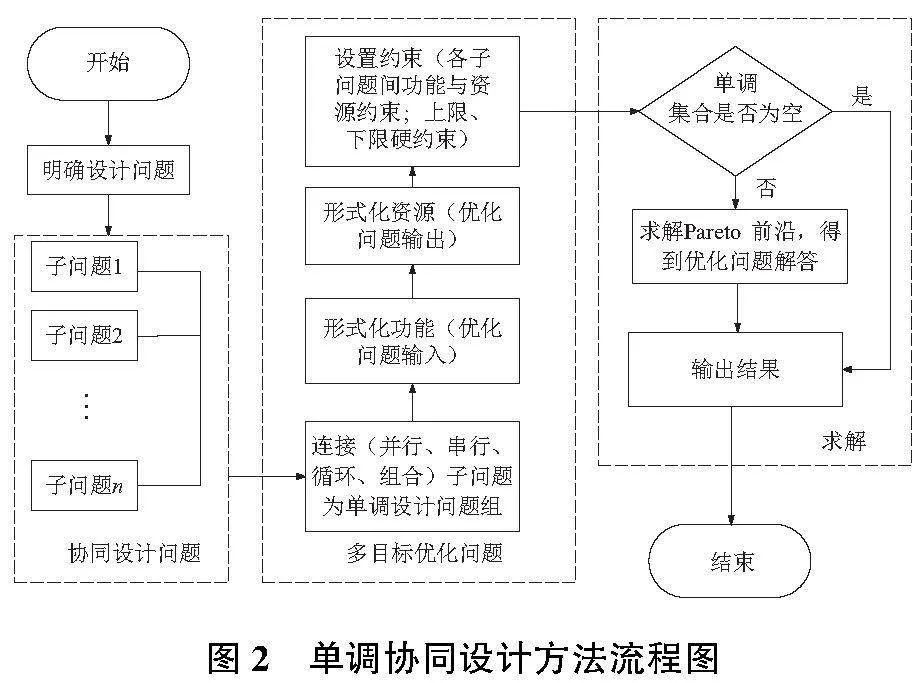
单调协同设计方法流程如图2所示。首先明确协同设计问题,形式化各个子问题的功能、资源,然后将所有子问题连接确定一个MDPIs,将协同设计问题转化为MDPIs单调性映射的多目标优化问题,最终求解Pareto前沿,得到多目标优化问题的解答。
2.2 设计方法在主动反射面系统的应用
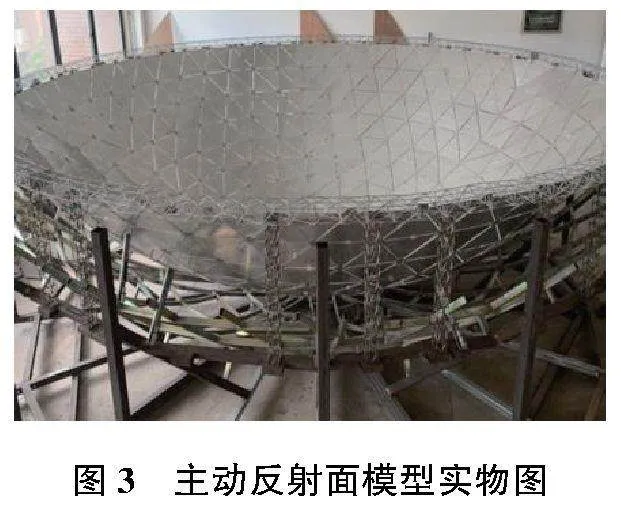
主动反射面系统的硬件组件主要包括主动反射面模型实体、测距传感器、促动器、电机、单片机和上位机等,图3所示为主动反射面模型实物。主动反射面控制系统需要统筹调节多个电机转速,将493个三角形反射面通过促动器径向伸缩量的调节形成期望的工作抛物面。该系统设计复杂,电机又是主动反射面控制系统的关键硬件组件,其重要性不言而喻。因此,将单调协同设计方法应用在主动反射面系统中,协同考虑电机、促动器和反射面面板三者得到电机选择方案。
1)协同设计子问题
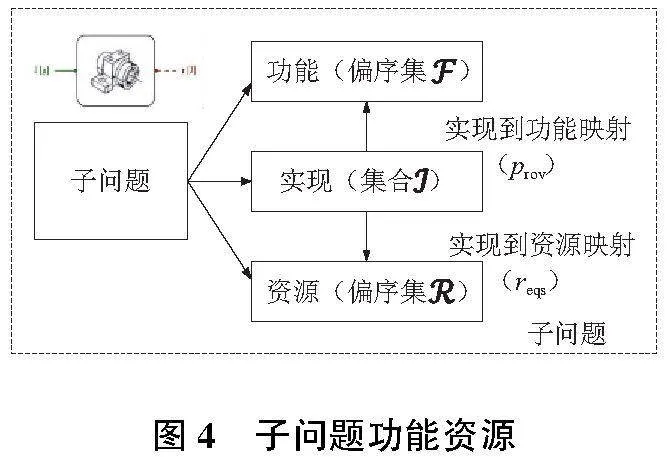
反射面面板、促动器和电机的各个子问题的功能资源MDPI如图5所示。电机设计子问题是将角速度和转矩作为所提供的功能(电机必须提供的功能),成本、质量作为所需的资源。促动器设计子问题的功能是将电机的转矩和角速度参数化并传递给反射面面板,所需要的资源包括成本、质量以及从电机获得的角速度和转矩。反射面面板设计子问题的功能参数化为力和面板运动的速度,资源是成本、质量以及促动器给反射面面板的转矩和角速度。
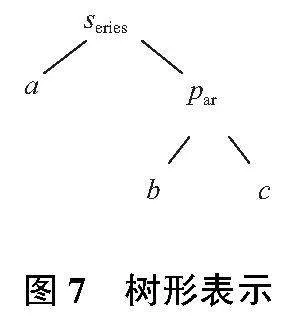
2) 多目标优化问题
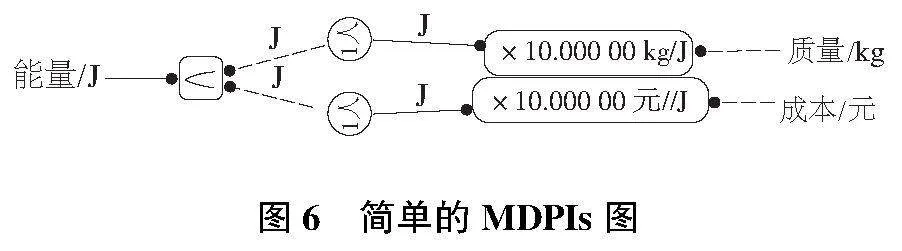
单个MDPI可以通过串行(series)、并行(par)、循环(loop)和组合(co)4种方式组合形成一个整体的单调协同设计问题MDPIs,将协同设计问题转变为求解多目标优化问题,其中MDPIs的功能为多目标优化问题的输入,MDPIs的资源为多目标优化问题的输出。各子问题的功能、资源和功能与资源之间的限制条件为多目标优化问题的约束。
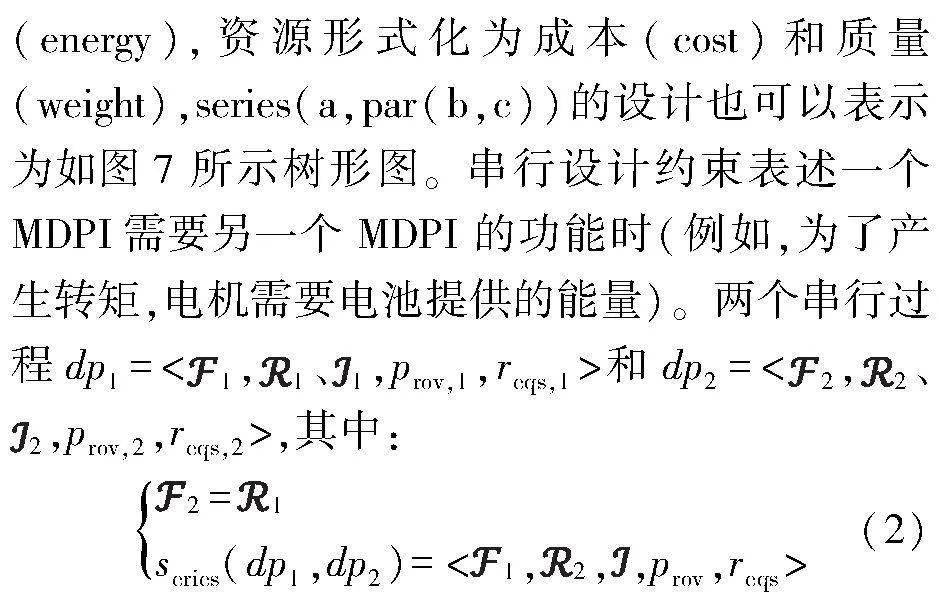
如图6所示的MDPIs,功能形式化为能量
将电机与促动器、促动器与反射面面板设计子问题连接,得到一个功能为速度和力、资源为成本、功耗和质量的单调协同设计问题组。功能与资源之间的约束通过以下非线性关系描述:①约束反射面面板运动速度≥3mm/s;②所需的功耗为电机所消耗的;③成本是电机、反射面面板和促动器的成本总和;④质量是电机、反射面面板和促动器的质量总和。部分约束伪代码如表1所示。
最终形成的电机+促动器+反射面面板MDPIs协同设计图如图8所示。
3) 求解多目标优化问题
完成电机、促动器和反射面面板MDPIs设计,分析电机选择在协同设计问题中得到电机控制功能映射到的最小反链的资源(成本、功耗和质量)过程,来验证协同设计方法的准确性和实用性。
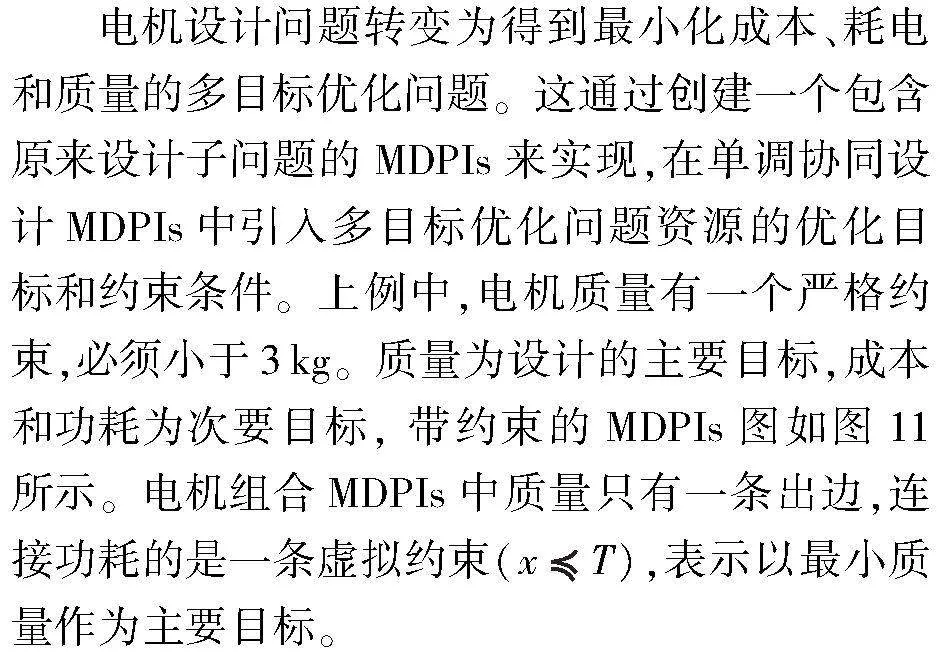
每个电机的资源和功能是质量、功率、成本和转矩,尺寸、转速等因素忽略不计,对应表2中ID2895电机为
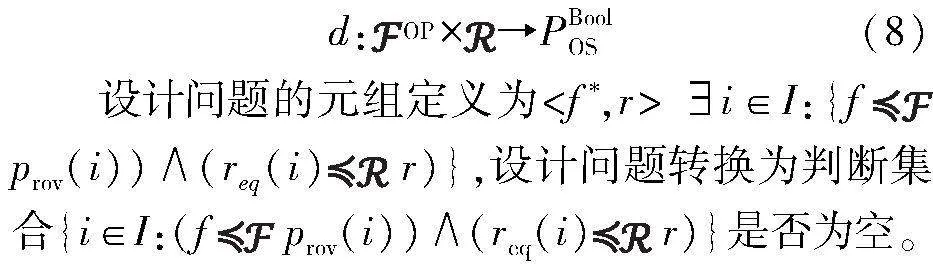
给定一个特定的功能f在资源r中是否可行,通过函数g来表示:
定义单调函数d(f,r)=g(f*,r),
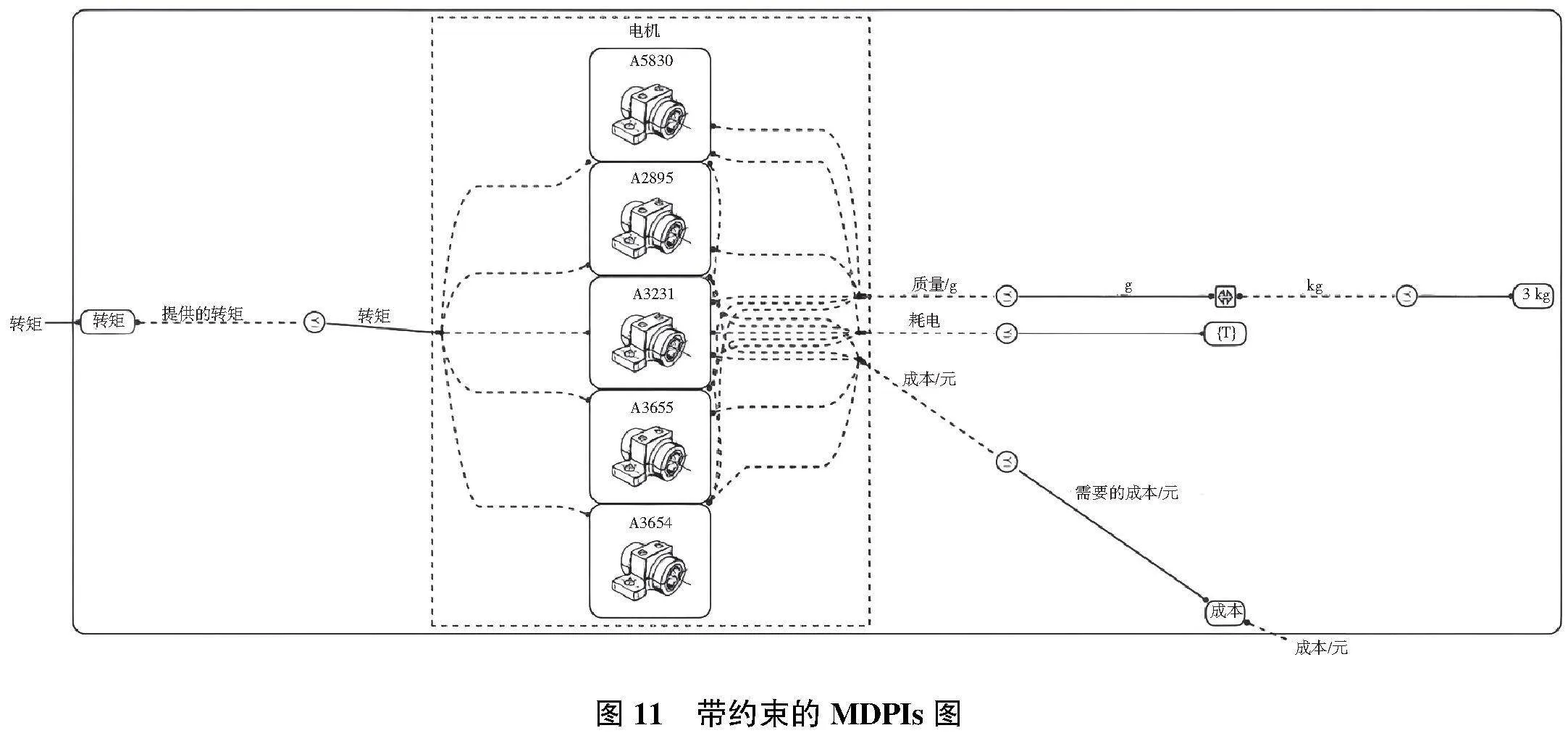
电机的设计问题把转矩作为提供的功能,成本、质量和功率作为所需的资源,其MDPI数学模型形式化如图9所示。
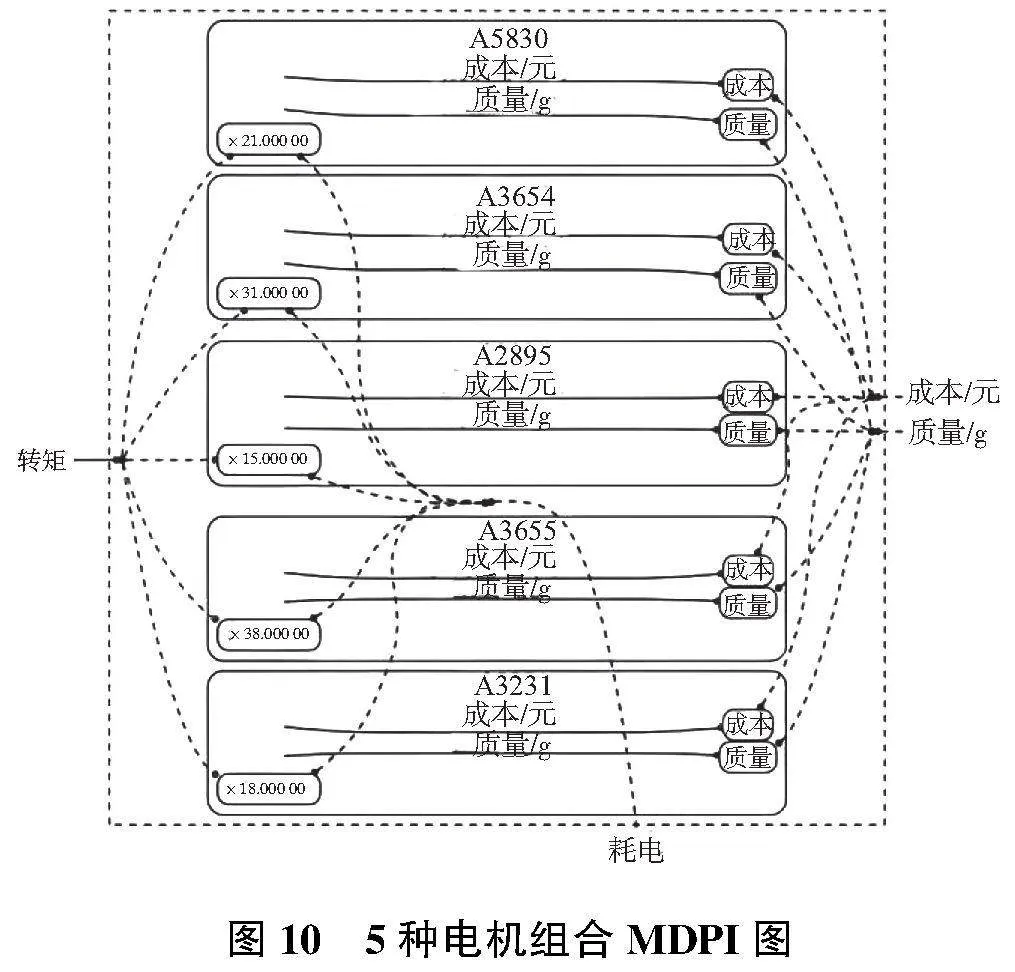
MCDP的求解是通过最小不动点迭代的方式得到Pareto前沿,设计问题之间的依赖约束越多,得到的方程式越复杂。根据表2的性能参数,通过代码编译,为不同的备选电机建立独立的电机设计模型,使用choose关键字描述电机不同电机模型的选择问题,Motors.mcpy文件中5种电机组合如图10所示。
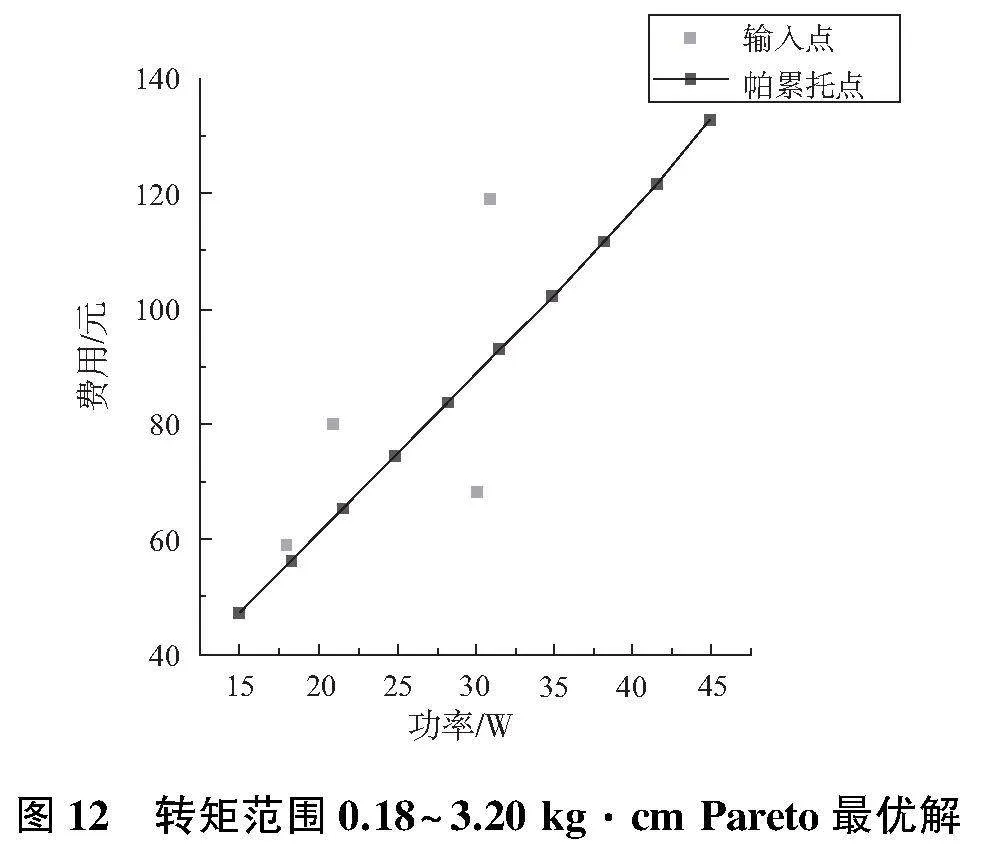
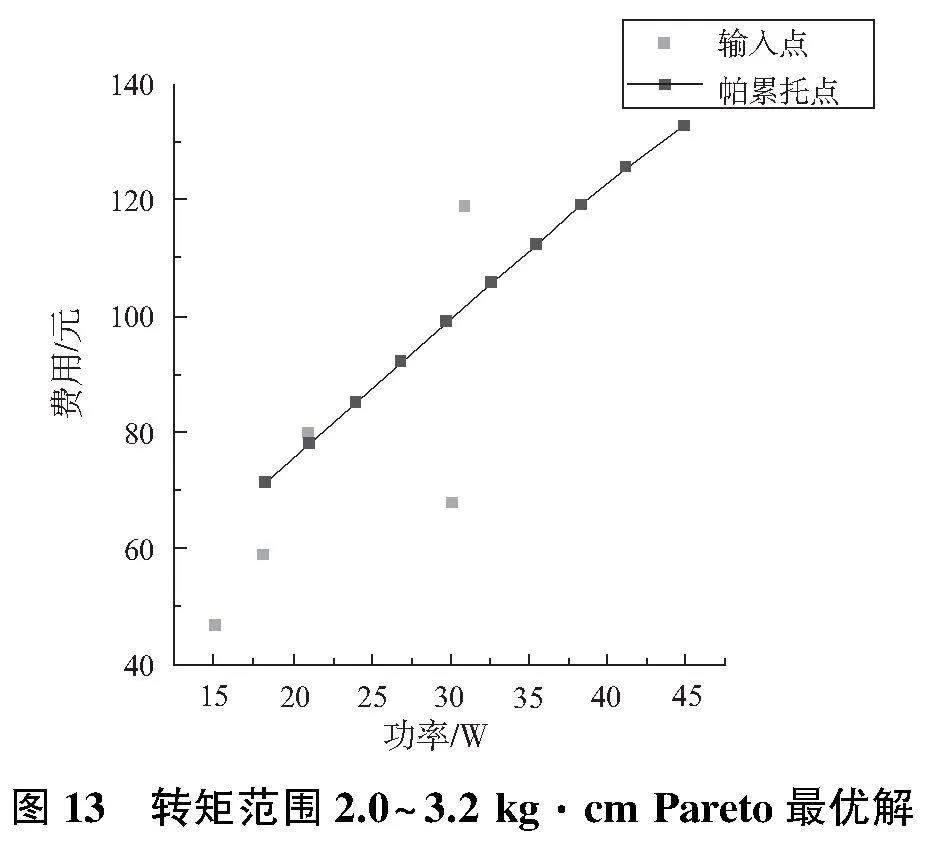
通过对多目标优化问题的求解,得到最优的设计结果,为了进一步验证设计方法的准确性,取不同功能要求的结果进行比较。图12为电机转矩功能范围为0.18~3.20 kg·cm的费用与额定功率的Pareto解答,图13为转矩范围2.0~3.2 kg·cm的Pareto解答。经过对比分析发现,当电机转矩范围变小要求更严格时,优化目标成本和功耗随之增加,当前5种类型电机中ID为2895、5830电机分别为符合转矩功能范围要求的最优结果,也可以从Pareto点中选择出合理的方案,以便高效地处理电机选择问题,这对指导实际工程设计中组件的优化选取具有一定的指导意义。
4)实验验证
为了验证设计方法的实用性,选取了转矩范围在2.0~3.2 kg·cm的最优设计方案ID为5830的电机,制作出的电机、促动器与反射面面板实物如图14所示。促动器由减速器、联轴器和直动螺杆组成,电机动力由减速器传输至联轴器,直动螺杆将电机输出的旋转运动转换为直动螺杆的直线运动。促动器安装在面板的节点下方,驱动节点沿球面径向运动,使面板运动。在优化结果满足最小化成本、耗电和质量的基础上,所选电机能基本满足位移输出、面形改变等功能需求。
在实验中,当需要调整反射面面形时,可以通过单片机驱动ID为5830的电机运动相应距离,完成反射面面板的运动。所选电机能够实现预期的所有功能需求,满足相应的设计需求,通过实验验证了设计方法的实用性。
3 结语
将单调协同设计方法应用在主动反射面系统电机选择实例中,考虑控制时电机、促动器和反射面面板的成本、质量和功耗之间的约束关系,确定多个目标的设计优化问题,通过最小不动点迭代的方式求解当前的最佳选择Pareto前沿(Pareto最优解对应的目标函数值),最终得到最优设计的解决方案,有效地解决了实际应用中系统硬件选择的问题。
本文结合电机选择的问题实例验证,初步探讨了单调协同设计方法的实用性与可行性,后续将继续运用在复杂的主动反射面控制系统设计过程当中,以期得到一种抽象层级较高的通用设计方法,为我国测控系统设计乃至工业软件国产自主化进程提供技术参考。
参考文献:
[1] 洪振强,李鉴,宋效正,等. GEO超大口径相机遮光板与卫星姿态控制联合设计[J]. 空间控制技术与应用,2022,48(1):16-22.
[2] CENSI A, LORAND J, ZARDINI G.Applied compositional thinking for engineers[J].Institute for Dynamic Systems and Control,2022,23(1):331-371.
[3] GARCIA-SANZ M. Control co-design:an engineering game changer[J]. Advanced Control for Applications,2019,1(1):e18.
[4] HUANG G Y,HU J B,HE Y F,et al. Machine learning for electronic design automation:a survey[J]. ACM Transactions on Design Automation of Electronic Systems,2021,26(5):1-46.
[5] LYU C,HU X S,SANGIOVANNI-VINCENTELLI A,et al. Driving-style-based codesign optimization of an automated electric vehicle:a cyber-physical system approach[J]. IEEE Transactions on Industrial Electronics,2019,66(4):2965-2975.
[6] PHAM-QUOC C,NGUYEN X Q,THINH T N. Towards an FPGA-targeted hardware/software co-design framework for CNN-based edge computing[J]. Mobile Networks and Applications,2022,27(5):2024-2035.
[7] GUPTA V, CHUNG T H, HASSIBI B, et al. On a stochastic sensor selection algorithm with applications in sensor scheduling and sensor coverage[J]. Automatica,2006,42(2):251-260.
[8] TZOUMAS V,CARLONE L,PAPPAS G J,et al. LQG control and sensing co-design[J]. IEEE Transactions on Automatic Control,2021,66(4):1468-1483.
[9] TANAKA T,SANDBERG H. SDP-based joint sensor and controller design for information-regularized optimal LQG control[C]//2015 54th IEEE Conference on Decision and Control (CDC). Osaka,Japan:IEEE,2016:4486-4491.
[10] SOUDBAKHSH D,PHAN L T X,SOKOLSKY O,et al.Co-design of control and platform with dropped signals[C]// Proceedings of the ACM/IEEE 4th International Conference on Cyber-Physical Systems.Philadelphia Pennsylvania:ACM,2013:129-140.
[11] 易永胜. 基于协同近似和集合策略的多学科设计优化方法研究[D]. 武汉:华中科技大学,2019.
[12] 汪浩,刘树青,贾茜,等. 基于数字孪生的数控机床自动上下料系统设计[J]. 机械制造与自动化,2021,50(4):101-103.
[13] 谢冰川,张岳,徐振耀,等. 基于代理模型的电机多学科优化关键技术综述[J]. 电工技术学报,2022,37(20):5117-5143.
[14] 杨丽丽,陈昌亚,王德禹. 基于多目标协同优化算法的卫星结构优化设计[J]. 上海交通大学学报,2014,48(10):1446-1450.
[15] 赵正旭,张涛,宋立强,等. 大型科研设施的数字化和信息传承与保护的研究[J]. 计算机时代,2019(10):36-39.
[16] 赵正旭,薛晓荣,郭阳,等. 500米口径射电望远镜圈梁结构解析与自动建模[J]. 现代计算机,2019(25):8-13.
[17] 张庆海,武鹏伟,赵正旭. 大型射电望远镜数字孪生系统架构设计与应用[J]. 计算机集成制造系统,2021,27(2):364-373.
[18] 张涛,郭阳,张庆海,等. FAST反射面单元数字孪生模型的创建[J]. 现代计算机,2020(25):15-21.
[19] 李爱华,周国华,李国平,等. 射电望远镜主动反射面系统的控制[J]. 光学精密工程,2016,24(7):1711-1718.
[20] CENSI A. Uncertainty in monotone codesign problems[J]. IEEE Robotics and Automation Letters,2017,2(3):1556-1563.
猜你喜欢
科技创新导报(2016年28期)2017-03-14 08:47:51
建筑科学与工程学报(2016年6期)2017-01-18 15:37:05
数学学习与研究(2016年17期)2017-01-17 18:31:20
软件导刊(2016年11期)2016-12-22 21:30:28
科技创新与应用(2016年33期)2016-12-17 14:55:12
电脑知识与技术(2016年21期)2016-10-18 22:51:02
电脑知识与技术(2016年13期)2016-06-29 22:01:07
电脑知识与技术(2016年13期)2016-06-29 21:00:53
科教导刊·电子版(2016年10期)2016-06-02 19:22:10
中国总会计师(2015年1期)2015-08-03 06:50:33
