
变电站二次控制电缆敷设机械化设备联动控制技术
2024-08-31 00:00:00廖志鹏张立林江维臻李娟韩存
机械制造与自动化 2024年3期










摘 要:针对联动控制能力较差,导致电缆磨损次数较多、电缆敷设成本较高的问题,提出新型变电站二次控制电缆敷设机械化设备联动控制技术。根据空间曼哈顿距离算法,构建电缆敷设基础模型,设计敷设调速与转矩检测方法,完成单一设备控制。根据电缆敷设机械化设备联动控制原理,构建PID联动控制器,进行机械化设备联动控制。实验结果表明:该技术可进一步降低电缆磨损次数,较早到达固定位置,保证初始端设备与末尾端设备速度一致,具有较为明显联动速度的控制能力。
关键词:变电站二次控制电缆;电缆敷设;联动控制;机械化设备;空间曼哈顿距离;质量控制
中图分类号:TM757文献标志码:B文章编号:1671-5276(2024)03-0269-06
Linkage Control Technology of Mechanized Device for Secondary Control Cable Laying in Substation
Abstract:In view of the poor linkage control ability leading to more cable abrasion times and higher cable laying cost, a new linkage control technology of substation secondary control cable laying mechanization device is proposed. According to the space Manhattan distance algorithm, the basic model of cable laying is constructed, and the laying speed regulation and torque detection methods are designed to complete the control of a single device. Based on the linkage control principle of the mechanized device for cable laying, a PID linkage controller is constructed to carry out the linkage control of the mechanized device. The experimental results show that the proposed technology can further reduce the number of cable wear, reach fixed position earlier, ensure the consistency of the speed of the initial end equipment with that of the end equipment, and has obvious linkage speed control ability.
Keywords:substation secondary control cable; cable laying; linkage control; mechanized device; space Manhattan distance; quality control
0 引言
变电站所使用的二次控制电缆主要由通信电缆、控制电缆以及电力电缆组成[1-2]。二次控制电缆在敷设过程中,需要将控制电缆线放置在传送盘上方,通过人工牵引的方式进行敷设安装。这种敷设方式,为现场施工造成了诸多不便,且现有的敷设工艺需要大量的人力、物力。由于变电站二次控制电缆敷设过程中需要使用大量的工作人员,变电站工况日益复杂,如果不在敷设过程中使用辅助工具,仅靠人力牵引,极易造成电缆破损,提高电缆敷设成本[3]。
针对上述问题,变电站二次控制电缆敷设机械化设备应运而生,主要应用于变电站二次控制电缆敷设工作中,如考虑设备相关性的智能变电站二次系统可靠性分析方法[4]和接地铜排对变电站二次电缆防护效果研究[5],实现电缆自动送线与牵引,但是极易出现电缆过度松弛或过度紧绷的问题。
为了更好地控制电缆敷设机械化设备,本文提出了变电站二次控制电缆敷设机械化设备联动控制技术。希望通过此技术,控制机械化设备工作过程,提升此设备的应用效果,为电缆敷设工艺的发展提供新的辅助设备。
1 构建电缆敷设基础模型
电缆敷设时,将终点自动牵引设备的牵引绳穿过全部机械式敷设防护设备后与控制电缆、起点自动牵引设备的牵引绳进行连接固定(通过电缆网套或查新设计新的紧固结构),传输履带1直至终点的牵引头自动回到起点与传输履带2控制电缆进行连接,以此反复。电缆敷设机械化设备工作结构如图1所示。
图1中,电缆敷设机械化设备由紧固推杆、传输履带设备1、传输履带设备2、动力总成、紧固支架、控制箱组成,传输履带设备1、传输履带设备2于自动送线设备的中间部位。当需要更换控制电缆型号时,通过紧固推杆调节传输履带设备1的高度,根据不同的线径调节至不同的高度,使传输履带设备1与传输履带设备2达到最理想距离。电力施工人员通过设备背后的智能控制器就可以操控该模块进行送线工作,同时自动送线设备的送线速度与终点自动牵引设备的牵引速度是同步的。动力反馈系统将检测到的情况反馈至主控单元,随后主控单元将控制动力系统提高传送量,完成电缆敷设机械化设备联动。
但在进行控制电缆牵引时容易因为惯性牵引导致电缆传送盘继续旋转传送,进而容易发生控制电缆散出线盘之外发生缠绕、拉扯的现象,为现场施工带来很多不便。
为了更好地完成电缆敷设机械化设备联动控制,引入空间曼哈顿距离算法,构建电缆敷设基础模型,为后续的操作提供基础。
电缆敷设的过程中,将多种类型的机械式敷设防护设备安装在所需的位置,将终点电缆自动牵引设备的牵引绳穿过全部机械式敷设防护设备后与控制电缆前端以及起点电缆自动牵引设备牵引绳进行固定。当完成第一段控制电缆敷设后,对起点自动牵引设备与终点自动牵引设备进行反转,通过整套变电站二次控制电缆敷设机械化设备完成自动化敷设,获取两个关键点之间的距离,确认每个维度差的绝对值。此时,固定点、起点、重点皆为控制关键点,设变电站空间平面中给定关键点位置集合Q=(a1,a2,a3,a4),若要获取此集合中的最短距离,需要在其中增设辅助节点集合G={x,y},并将图形整合为有带权无向图S(W,E,C),其中W表示图的顶点集;E表示图的边集;C表示边的权值,可写作C=[cij]n×n,此权值取值范围设定为无穷大。此次研究中,对每个节点增加一个度约束量[6],将其设定为vi。与此同时,对无向图中的变量展开设定:
式中:sij=1表示经过的路径(i,j);sij=0表示没有经过的路径。根据上述设定,得到电缆敷设空间曼哈顿距离模型:
获得电缆敷设基础模型,如图2所示。
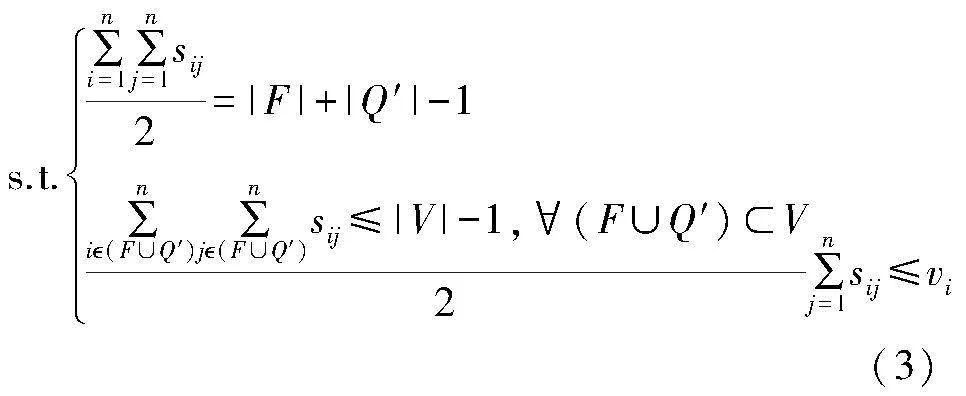
基于空间曼哈顿距离参数,电缆通道中需要连接的设备点个数可设定为Q′,通道中的拐点与通道节点组成对应的集合为F,假设某一电缆节点为Q′中的元素,其约束度为v=1,则此点的约束条件可表示为
电缆敷设装置与各个被控制设备是包含关系,且被控制对象不是唯一的,而是共同作用的结果。为了保证计算参数是唯一的,使用约束度构建目标变电站电缆敷设基础模型,对变电站电缆敷设情况进行分析。
2 设计敷设调速与转矩检测方法
根据电缆敷设基础模型构建结果,对目标变电站进行分析。初步分析完成后,对敷设过程中敷设路线对机械化设备的速度限制展开计算:
A=Ar+Ad+Ai(5)
式中:Ar表示机械化设备工作负载;Ad表示敷设过程中的摩擦负载;Ai表示惯性负载。外部负载会对机械化设备的运动速度造成影响,需要对其进行及时调整。在确定机械化设备运行速度后,对装置运行过程中的转矩展开检测,以此控制装置的运动状态。本次研究中使用谐振器[9]完成此部分研究,谐振频率采用s表示,则有
式中:v表示测试声波的传输速度;b表示测量设备与机械化设备之间的间距。
为了实现高质量的控制过程,在此次研究的过程中,对机械化设备表面材料对转矩检测结果的影响展开计算,则有
式中:z表示机械化设备的材料常数;ρ表示机械化设备表面材料密度。
为了避免转矩输出造成钢丝绳、电缆线、控制线的损坏,进行转矩检测。根据上述两公式,预设一个最大电流值,在自动牵引设备进行工作时,以STM32F407ZGT6为主控芯片的控制结构会实时对自动牵引设备的马力电机进行检测,得到机械化设备转矩检测公式:
式中s0表示转矩检测过程中的初始谐振频率。以此,将电机转矩数据对应的电流数据进行采集,当电流超过预设的阈值,自动牵引设备定义为危险情况,将停止运行并且发出警报提示电力人员。对机械化设备的运行状态进行检测与调整,将其作为联动控制技术中的关键环节。
3 实现电缆敷设机械化设备联动控制
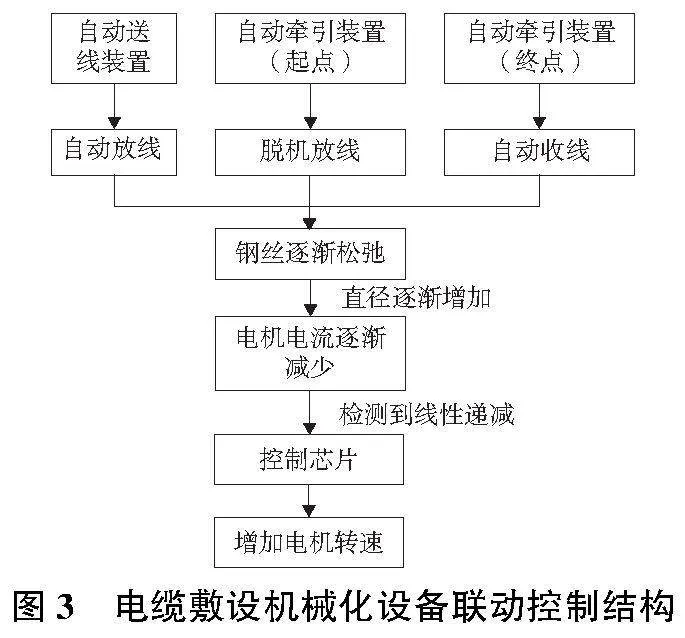
在实际变电站二次控制电缆敷设过程中,单一的机械化设备是无法独立完成敷设工作的。需要多台机械化设备同期工作才能顺利完成敷设任务。通过多个案例以及文献分析后,将电缆敷设机械化设备联动控制结构,如图3所示。
图3中,自动送线设备进行自动放线、起点的自动牵引设备进行脱机放线、终点的自动牵引设备进行自动收线,由于自动牵引设备的直径会不断发生变化,所以会出现控制电缆被过度绷紧或者过度松弛的情况。为了避免这类危险情况的发生,设计了自动调速功能。当控制电缆被过度绷紧时,自动牵引设备电机的电流会逐渐上升,自动牵引设备中的控制芯片通过自检发现电流出现线性增长,会对自动牵引设备的转速做出调整,适当减慢自动牵引设备电机的转速。
对牵引电机、传输履带设备、卷线(钢丝)盘、减速机构、控制箱的联动动力学参数进行设定。将联动控制过程的开环传递函数设定如下[10-11]:
式中:w0表示单一设备初始运行状态;Emax表示设备运行最大效率;Hs表示设备可承受电缆质量;Xmax表示电缆最高敷设效率;Hi表示电缆敷设节点序号;δ表示设备运行角速度;ML表示各个敷设节点增加的角速度;z表示传递系数。根据此公式,得到各个设备在工作情况下的力矩平衡方程[12]:
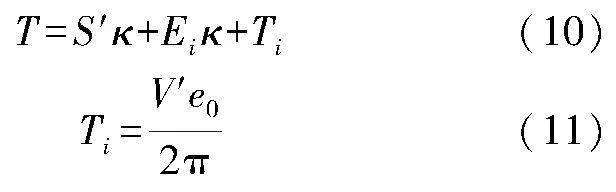
式中:T表示机械化设备负载转矩;S′表示机械化设备的总转动惯性;Ti表示目标设备连接的下一个设备输出转矩;V′表示机械化设备排量;κ表示机械化设备的角速度;Ei表示负载黏性阻尼系数。根据实际工况,将各个设备的负载转矩设定为正实数,对式(10)与式(11)进行求解,则有:
将式(8)计算结果代入式(12),得到设备工作过程中的力矩极值,根据此极值控制各设备的转速与力矩,获得优化后的动力学参数,形成联动控制后的动力学模型。与此同时,根据上述设定结果,构建PID联动控制器,控制器的控制规律为
式中:q(t)=x(t)-y(t),x(t)表示期望控制值,y(t)表示实际输出控制值;g′(t)表示控制器输出控制量;q(t)表示控制器输出的偏差控制值;Kj表示控制器控制系数。为了更好地实现联动控制,联动控制函数为
至此,变电站二次控制电缆敷设机械化设备联动控制技术设计完成,实现设备间的联动工作,避免对控制电力出现过度拉扯的现象。
4 实验分析
此次研究中提出了一种变电站二次控制电缆敷设机械化设备联动控制技术,现验证该方法的应用性能是否符合当前工作需求。
4.1 实验准备
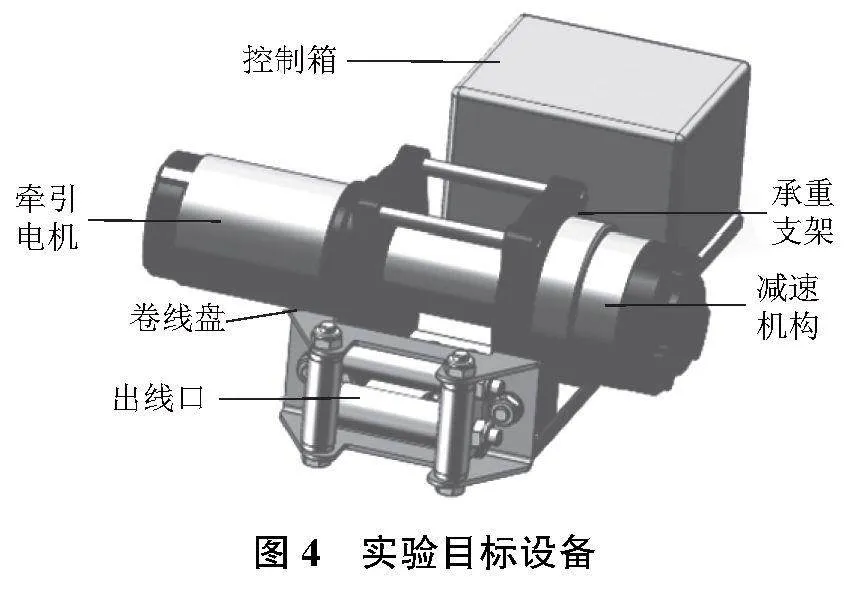
对市面上的变电站二次控制电缆敷设机械化设备进行分析后,将目标机械化设备设定为以下结构,并将其作为此次实验的基础,如图4所示。
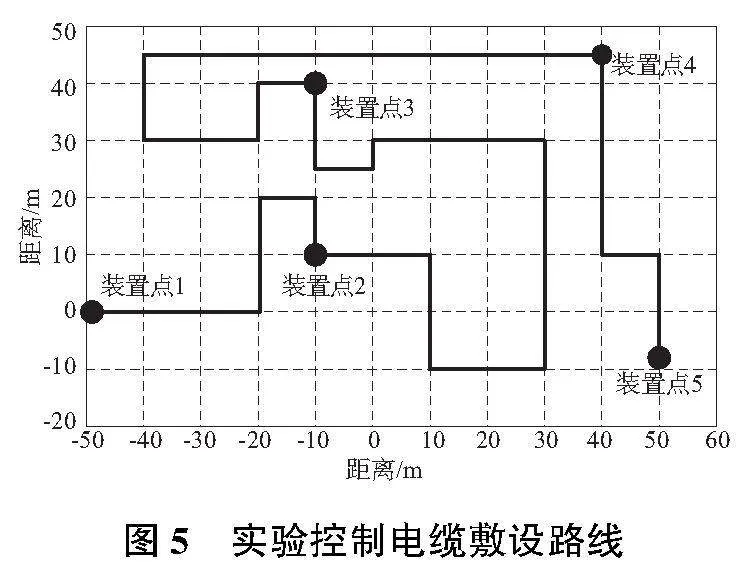
图4中,在确定实验目标装备后,对实验环境展开设定。由于真实的变电站环境较为复杂,如实验过程中出现异常将对变电站造成不可逆转的损失。为此,在此次研究中搭建实验平台完成实验分析过程,实验敷设路径如图5所示。
按照图5中内容,安装电缆敷设机械化设备。而后,在机械化设备上安装废弃电缆,模拟电缆敷设过程。
4.2 联动控制效果分析
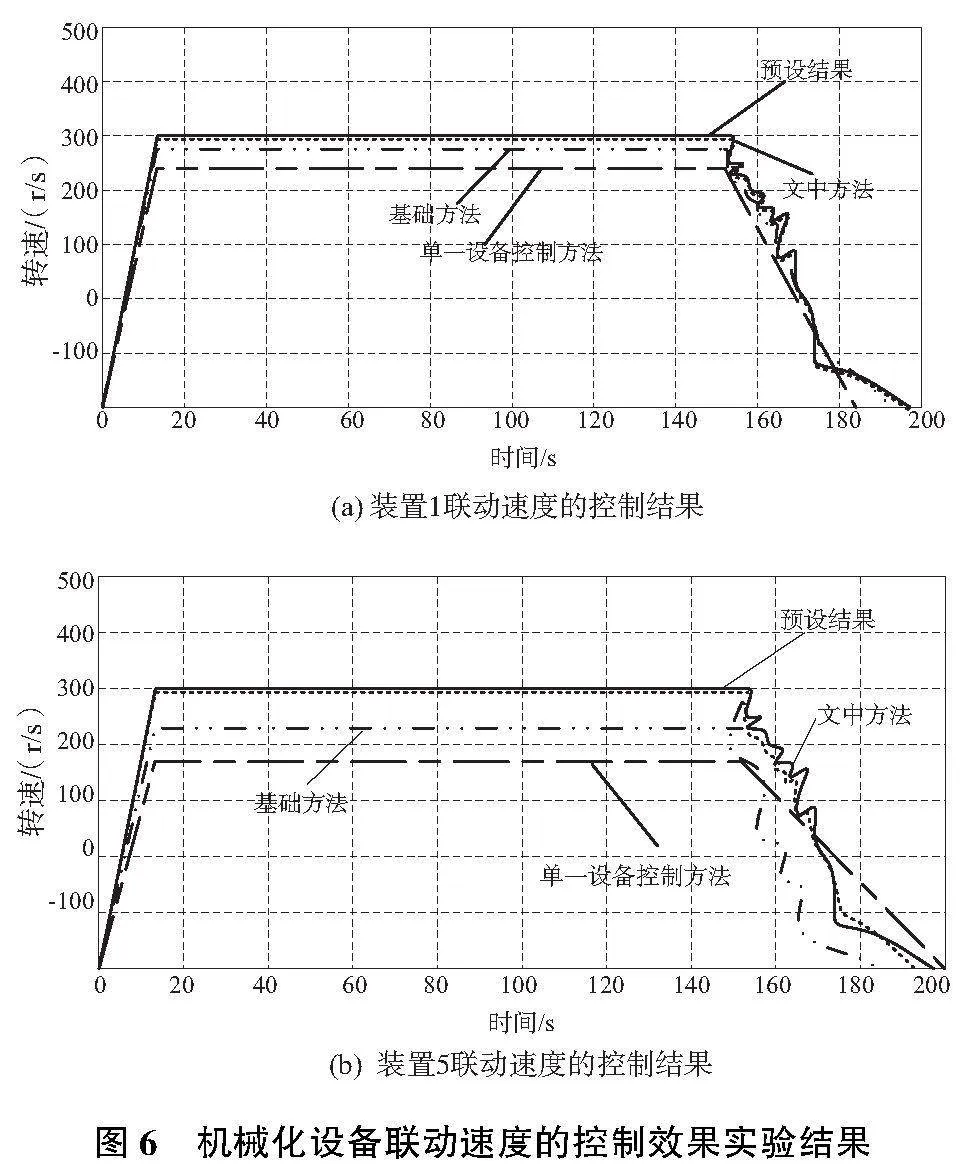
基于图4—图5,此次实验中安装了5台设备,为证实文中方法具有较高的联动控制能力,对装置点1 与装置点5的运行速度进行实验对比分析。在实验前,预先设定机械化设备的运行速度并绘制出其波形作为实验中的对比组。在实验过程中采集装置点1与装置点5的运行速度数值并绘制出其波动与预设速度进行对比,确定文中方法对装置运行速度的控制能力。为增加实验对比性,选择基础联动控制方法与单一设备控制方法和文中方法进行对比,所得结果如图6所示。
基于图6,文中方法的联动控制能力明显优于其他方法。根据以往案例分析结果发现,在以往的电缆敷设过程中,初始端设备与末尾端设备采用相同的速度与控制技术但两者之间还存在一定的差异,而文中方法可很好地解决此问题,保证初始端设备与末尾端设备速度一致,避免电缆敷设过紧或过于松弛。
4.3 成本分析
完成200m的电缆敷设工作,基础敷设工作成本为3 000元,假设每次磨损增加100元,设备运行时间成本每分钟50元,使用文中方法以及选中的实验方法完成电缆敷设过程,不同方法的基本对比结果如表1所示。
在表1中,实验方法以人力为主、劳动强度大、方法单一,需耗费大量人力和时间,施工成本高,效率偏低,而本文方法具有智能反馈功能、联动控制功能,能够实现设备间的联动工作。
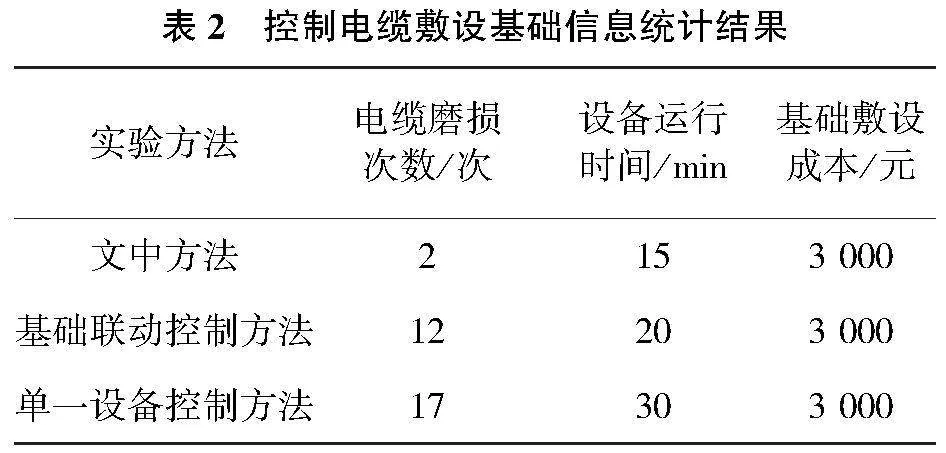
在电缆敷设过程中,容易造成电缆在拐弯处以及上下进线、出线处被桥架等尖锐部位刮伤或磨损造成供电影响,减少使用寿命等。由此,统计设备运行时间以及电缆磨损次数,具体数据如表2所示。
基于表2,得到机械化设备联动控制成本具体数据如下。
文中方法:
M1=3 000+2×100+15×50=3 750(16)
基础方法:
M2=3 000+12×100+20×50=5 200(17)
单一设备控制方法:
M3=3 000+17×100+30×50=6 200(18)
基于上述过程,文中方法分析了机械化设备的角速度与负载转矩之后,保证控制过程的同时性与序列性,控制能力相对较好,实现全方位辅助线缆穿透,可进一步降低电缆磨损次数,解决电缆敷设成本与开销,提升电缆敷设的经济性。将此实验结果与机械化设备联动速度的控制效果实验结果融合分析可以看出,具有明显的优越性。
5 结语
整合当前变电站二次控制电缆敷设机械化设备联动控制技术后,采集装置点1与装置点5的运行速度数值,可进一步降低电缆磨损次数,较早到达固定位置,保证初始端设备与末尾端设备速度一致,完成新型联动控制技术优化。
参考文献:
[1] 杨爱晟,冯霆,王中杰,等. 变电站低压电缆绝缘层老化特征及老化模型[J]. 工程塑料应用,2022,50(5):126-131.
[2] 严有祥,朱婷,张那明,等. 交直流电缆共沟敷设电磁环境影响因素[J]. 电工技术学报,2022,37(6):1329-1337.
[3] 陈文教,郑志豪,徐研,等. 基于高导热管道提升排管敷设下的电力电缆载流量的研究[J]. 绝缘材料,2022,55(2):97-103.
[4] 唐志军,李泽科,陈建洪,等. 考虑设备相关性的智能变电站二次系统可靠性分析[J]. 福州大学学报(自然科学版),2021,49(6):782-789.
[5] 刘倩,曹雯,苗浩铭,等. 接地铜排对变电站二次电缆防护效果研究[J]. 电网与清洁能源,2021,37(7):58-64.
[6] 李文昊,蒲瑶,张立新,等. 小型战术导弹弹上电缆网敷设设计[J]. 弹箭与制导学报,2021,41(3):53-56.
[7] 刘刚,许志锋,王鹏宇,等. 基于磁热流多场耦合的双沟四回路电缆温度场分布与载流量计算[J]. 华南理工大学学报(自然科学版),2020,48(12):10-17.
[8] 简学之,刘子俊,文明浩,等. AR增强现实技术在变电站二次设备运检中的应用[J]. 电力系统保护与控制,2020,48(15):170-176.
[9] 郝晓光,耿少博,任江波,等. 智能变电站二次电缆回路建模方法研究与应用[J]. 电力科学与技术学报,2020,35(4):161-168.
[10] 张重远,芮皓然,刘贺晨,等. 高压单芯电缆金属护套感应电压仿真计算及最大允许敷设长度研究[J]. 高压电器,2020,56(5):143-148.
[11] 王同文,刘宏君,邵庆祝,等. 智能变电站二次回路智能预警及故障诊断技术研究术[J]. 电测与仪表,2020,57(8):9-63,98.
[12] 冯跃,吴跃康,任杰,等. 基于无线同步技术的数字化变电站二次系统新型测试方法[J]. 中国测试,2020,46(1):117-123.
猜你喜欢
科技与创新(2016年19期)2016-11-09 19:43:15
科技视界(2016年23期)2016-11-04 13:13:20
中国科技博览(2016年18期)2016-10-19 09:03:36
中国科技博览(2016年18期)2016-10-19 08:46:18
中国科技博览(2016年18期)2016-10-19 07:45:39
科技视界(2016年21期)2016-10-17 17:58:28
科技视界(2016年20期)2016-09-29 13:11:33
科技视界(2016年20期)2016-09-29 13:10:51
科技视界(2016年20期)2016-09-29 13:10:08
中国科技博览(2016年6期)2016-04-25 13:02:40
