
中型无人直升机内环控制器的设计与实现
2024-08-31 00:00:00李晨毓姚志豪祖家奎桑可可
机械制造与自动化 2024年3期











摘 要:针对某中型无人直升机对内环控制的特殊需求,考虑模型参数不确定以及各种扰动对无人直升机控制的影响,设计一种基于线性自抗扰的内环控制系统,实现无人直升机控制系统对不确定扰动的抑制。介绍无人直升机动力学建模、稳定性分析、内环控制器设计与仿真验证的一整套设计流程。结果表明:所设计的内环控制器能够满足技术需求,有很好的抗扰效果,达到了预期的研究目标。
关键词: 无人直升机;内环控制器;线性化模型组;线性自抗扰
中图分类号:TP23; V249.1文献标志码:B文章编号:1671-5276(2024)03-0243-06
Design and Implementation of Inner Loop Controller for Plant Protection Unmanned Helicopter
Abstract:In line with the special demand of a certain type of plant protection unmanned helicopter for inner loop control and in consideration of the influence of model parameter uncertainty and various disturbances on the control of unmanned helicopter, an inner loop control system based on linear auto disturbance rejection is designed to realize the suppression of uncertain disturbances by the unmanned helicopter control system. This paper introduces a complete set of design flow of dynamics modeling, stability analysis, inner loop controller design and simulation verification of unmanned helicopter. The results show that the designed inner loop controller can meet the technical requirements with good anti-interference effect and the achievement of the expected research objectives.
Keywords:UMH;inner loop controller;linearized model group;LADRC
0 引言
无人直升机作为传统直升机的延伸产物,具有的独特飞行能力和应用价值,也是飞行器控制领域的研究热点[1]。飞控系统作为无人机的核心部分,在整个无人机系统中起着至关重要的作用。无人直升机飞控系统的主要作用是通过机上的各种传感器获取飞机的实时状态信息,再通过相应的计算处理,解算出无人机各个执行机构的控制量。飞控的主要任务是保证无人机的稳定飞行,在稳定飞行的基础上不断提高无人机的飞行品质。设计研究出可靠、稳定和具有高飞行品质的内环控制系统,可以为后续无人直升机的进一步发展打下坚实的基础,在科研和实际应用方面都具有非常重要的意义[2-3]。
本文结合某课题需求,针对一款中型无人直升机的内环控制器展开研究设计,该内环控制为姿态控制。结合该中型无人直升机的线性化模型进行特性分析,针对该无人直升机面临的鲁棒性问题,设计出横向、纵向、偏航3个通道的线性自抗扰控制器,通过扩张状态观测器对系统内部不确定参数和未知外部扰动进行估计,实现控制器的稳定性、鲁棒性、抗扰性及跟踪性。
1 需求分析
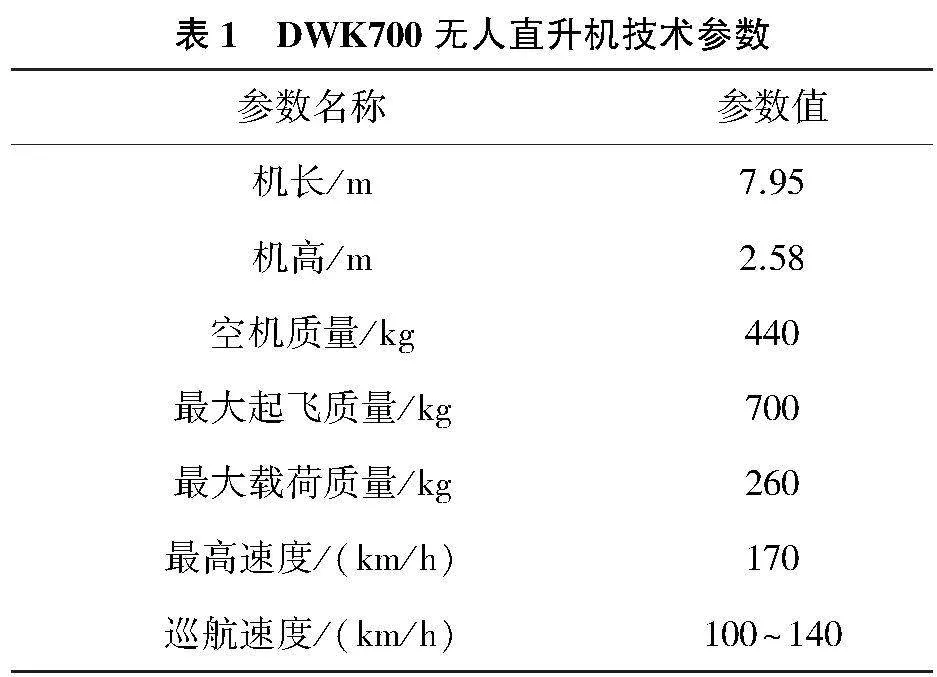
本文旨在针对DWK700中型无人直升机(主要技术参数如表1所示)设计一套内环控制系统。在无人直升机应用的各个领域对姿态保持都有很高的要求,如目标跟踪、农药喷洒等。姿态的异常抖动都会对任务的执行带来很大的影响,如被跟踪的目标脱离视野、农药喷洒不均匀等。所以在无人直升机作业过程中,对姿态的保持有着较高的要求。
本文需要针对一种控制量干扰,如舵机异常或人为操纵失误造成的控制量异常抖动来设计一款有着较好抗扰效果的内环控制器。
2 中型无人直升机数学模型
对于单旋翼带尾桨的常规布局无人直升机而言,通过分析其主要气动部件的气动力学特性,得到其对应的力与力矩方程(如主旋翼气动力模型、机身气动力模型、尾桨气动力模型和安定面气动力模型等)从而建立无人直升机的非线性动力学微分方程组。
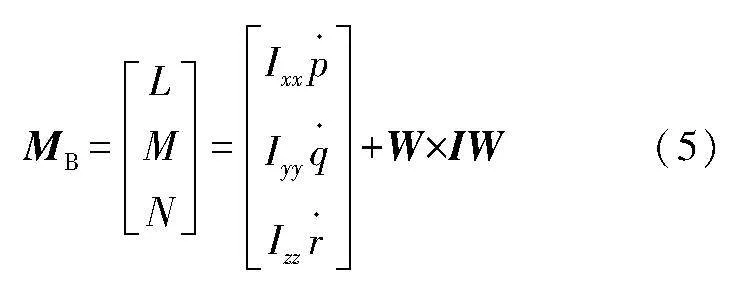
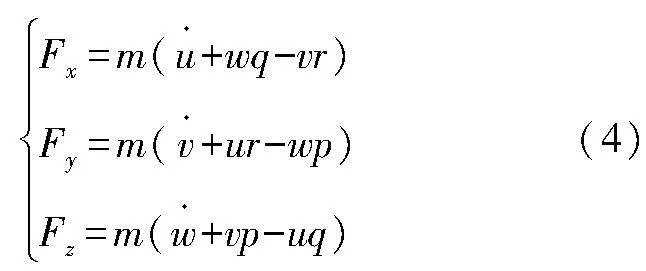
在机体坐标系下,无人直升机的合力FB与合力矩MB表示为:
式中:Fx、Fy、Fz分别表示无人直升机在x、y、z方向上的分力;XG、YG、ZG分别表示重力在x、y、z方向上的分力;Xmr、Ymr、Zmr、Xtr、Ytr、Ztr、Xvf、Yvf、Zvf、Xhf、Yhf、Zhf、Xxy、Yxy、Zxy分别表示主旋翼、尾桨、垂尾、平尾与机身分别在x、y、z上产生的分力;L、M、N分别表示滚转力矩、俯仰力矩及偏航力矩;Lmr、Mmr、Nmr,Ltr、Mtr、Ntr,Lvf、Mvf、Nvf,Lhf、Mhf、Nhf,Lxy、Mxy、Nxy分别表示主旋翼、尾桨、垂尾、平尾与机身的滚转力矩、俯仰力矩及偏航力矩。
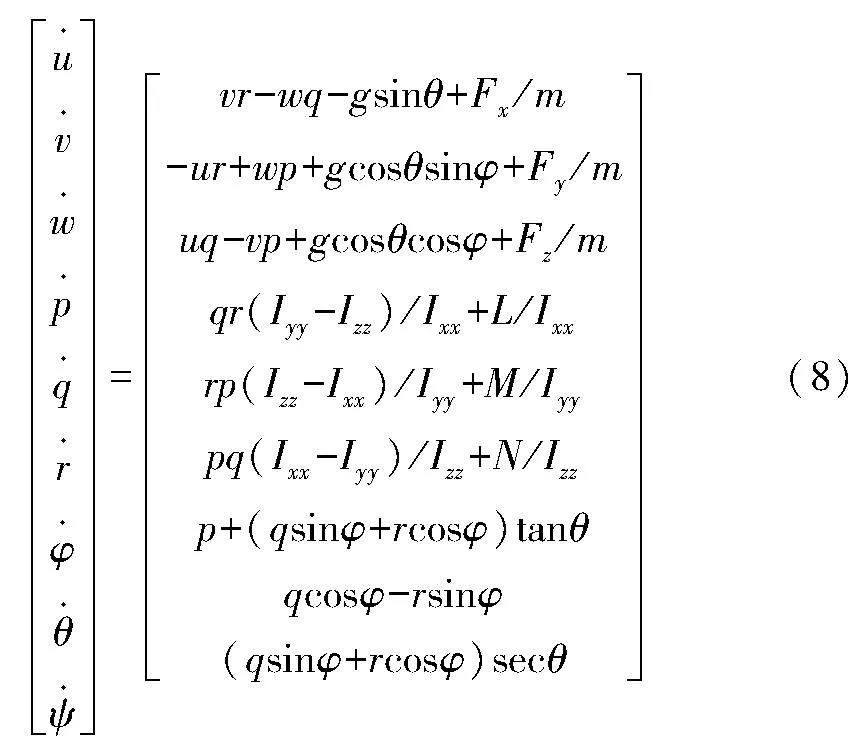
根据牛顿第二定律F=ma,得到直升机的动力学方程:
式中:m为无人直升机的质量;W为无人直升机姿态角速度;E为角速度转换矩阵;I为转动惯量矩阵。
直升机机体合力在3个坐标轴方向上的分力计算方程为
式中:u、v、w分别为直升机在大地坐标系下的三轴线速度;p、q、r分别为滚转角速率、俯仰角速率、偏航角速率。
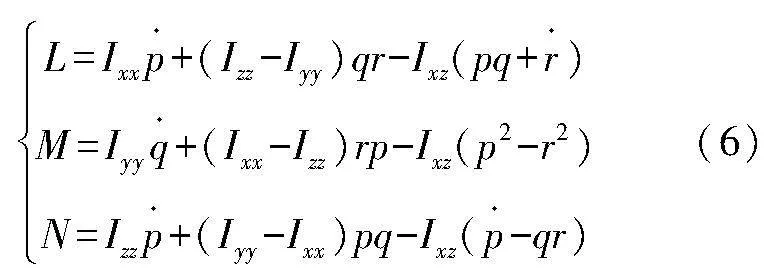
机体坐标系中,直升机在外力矩作用下的角运动方程为[4]
即
且
式中:Ixx、Iyy、Izz分别为绕x轴、y轴、z轴的转动惯量,惯性积Ixz为0。
由此可得,直升机的非线性动力学方程为
由于无人直升机非线性模型的一些局限性,给后续的模型特性分析和控制律设计带来了很大难度,同时其建模难度过大且精度不高,故需要将此非线性模型转化为线性化模型再进行分析设计。
将直升机在各个飞行平衡状态下的运动方程进行泰勒展开,忽略高阶导数后,各个状态参量表示为基准值加上一个增量[5],可以得到增量形式的无人机线性状态方程为
式中A、B分别为状态转移矩阵与输入矩阵。
本课题组在长期的项目经验积累中发现,在无人直升机处于平衡状态下,其航向通道不会随其他状态的变化导致受力不同,所以可以将原无人直升机的9阶状态方程简化为下式中的8阶[6]:
Δx=[ΔuΔvΔwΔpΔqΔrΔφΔθ]T(10)
Δu=[ΔulatΔulonΔupedΔucol]T(11)
3 稳定性分析
直升机的运动是一个纵横向耦合严重的运动,为了更精确地分析无人直升机横纵通道的稳定特性,将两个通道分离开来进行相应的响应绘图与分析。基于内环的横纵向运动包括滚转角、滚转角速率、偏航角、俯仰角、俯仰角速率运动[7]。本节以无人直升机悬停、前飞10m/s与20m/s的状态为例,对横向与纵向的稳定性进行分析。
3.1 纵向模态
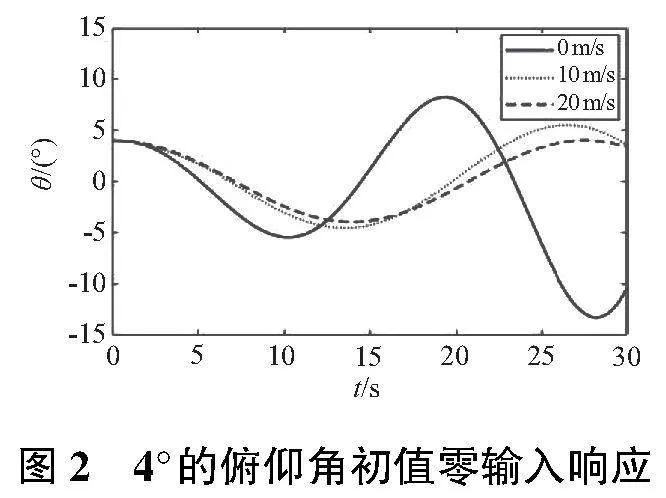
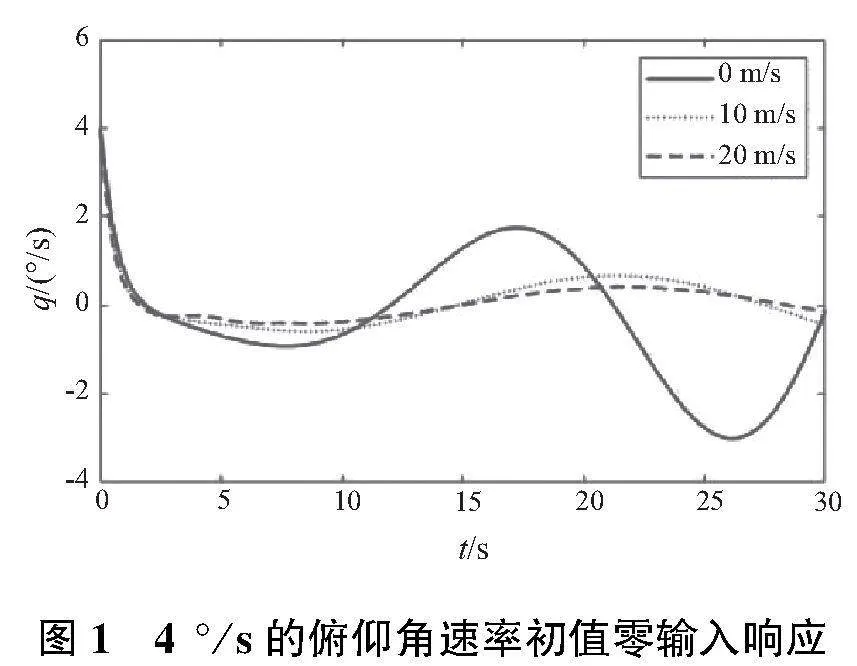
对于纵向的稳定性分析,分别给定4°/s的俯仰角速率初值、4°的俯仰角初值来观察对应俯仰角速率、俯仰角的零输入响应(图1)。两种响应所对应的模态分别为俯仰阻尼模态、俯仰震荡模态。
由图1可以看出俯仰阻尼模态在短周期内是稳定的,随着速度的不断增大,衰减的速度也在不断增大。由图2可知,纵向震荡模态是一个不断震荡最终发散的模态。待俯仰阻尼模态快速表现过后,纵向震荡模态开始有所显现,逐渐震荡最终发散,但随着速度的不断增大,震荡的幅度有所缓解,但仍然处于发散状态。
由上述分析可知,虽然速度的增大可以缓解纵向的不稳定性,但远远达不到控制所需的稳定性要求,所以纵向控制主要目的是解决飞行的稳定性,在达到稳定性要求的基础上增大阻尼。
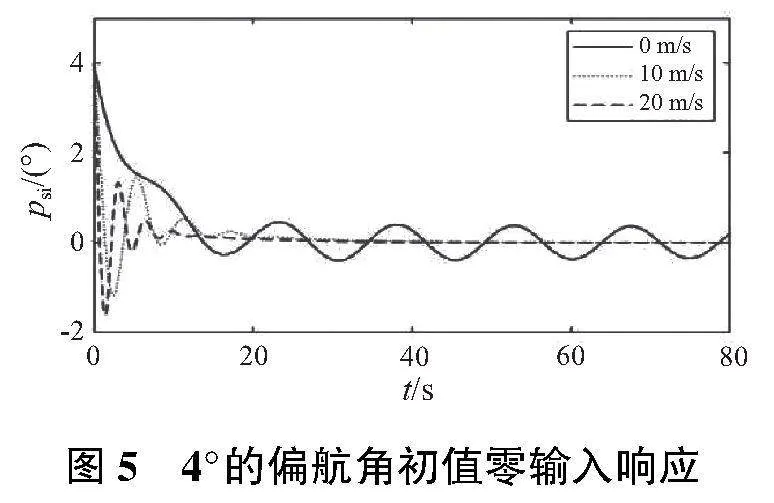
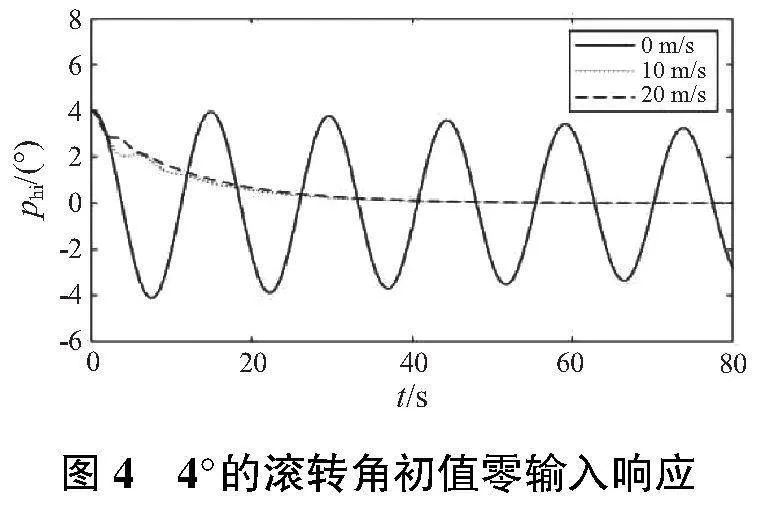
3.2 横航向模态
对于横航向的稳定性分析,分别给定4°/s的滚转角速率初值、4°的滚转角初值、4°的偏航角初值来观察对应滚转角速率初值、滚转角、偏航角的零输入响应。
横航向模态中短周期模态为滚转阻尼模态,滚转角速率受扰后的响应属于滚转阻尼模态。由图3可知,该模态衰减速度很快,是一个稳定的模态。长周期模态为横向震荡模态,滚转角受扰后的响应属于横向震动模态,其动态响应如图4所示,有收敛趋势,但由于阻尼不足,衰减较慢。偏航角收到扰动后如图5所示,由于直升机的尾桨会提供一定的反作用力,增强了该方向上的阻尼,使得扰动衰减。与纵向模态相同,随着无人直升机飞行速度的不断增加,扰动衰减的速率也会不断增加,但运动响应仍然不够理想。所以通过分析,与纵向模态不同,横航向模态在控制方面的主要需求为加快响应时间,以提高无人直升机的控制质量。
4 操纵性分析
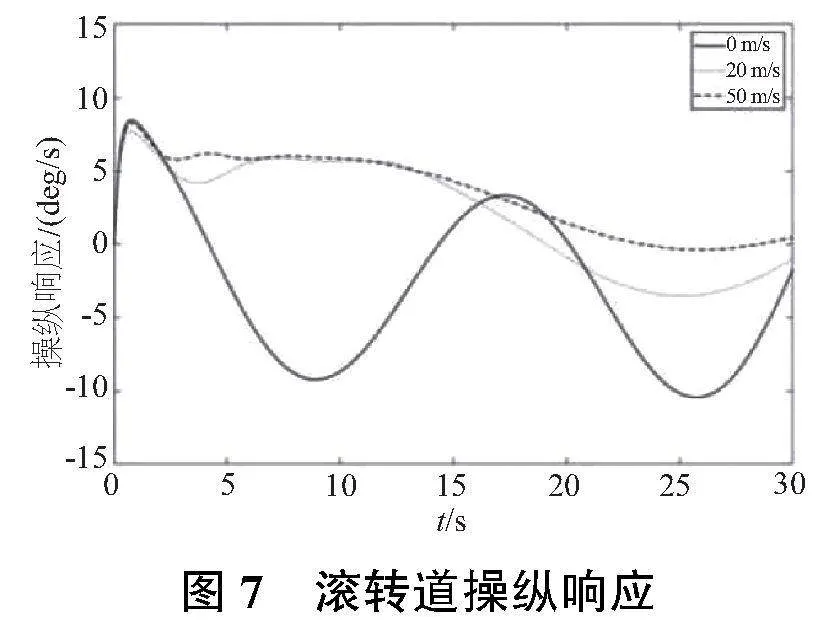
该无人直升机的操纵特性分析主要从操纵灵敏度的角度展开。在无人直升机不加控制的前题下,通过观察各个控制通道在1°控制变距下的状态变化情况来研究无人直升机在整个飞行包线下的控制灵敏程度。
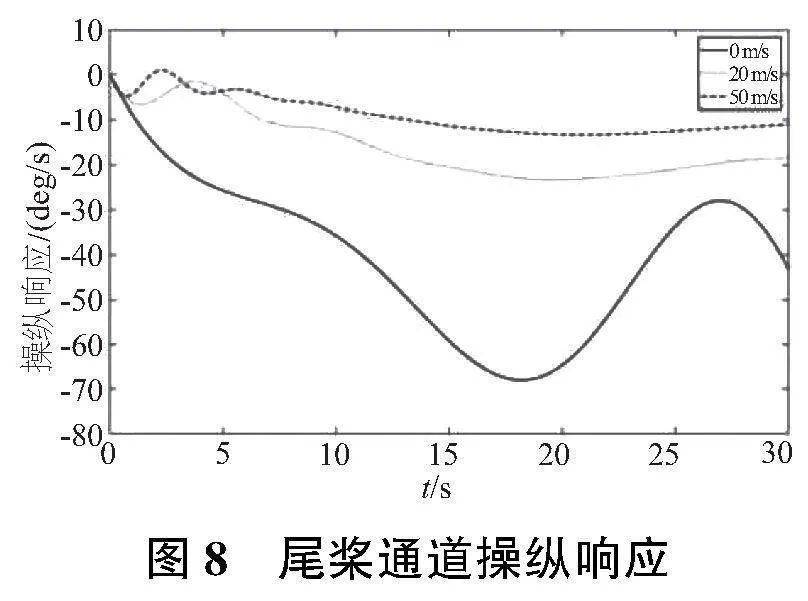
分别给定1°的纵向变距、横向变距和尾桨距,观察其俯仰通道,滚转通道和尾桨通道的响应曲线如图6—图8所示,分析其3个通道的操纵性。
从图6—图8可以看出,在悬停阶段,直升机三通道的操纵灵敏度较大,转为前飞段后,3个通道的操纵灵敏度都有减小。这是因为前飞段速度的增加导致气动阻尼和悬停阶段的相比增大,因此各通道单位周期变距引起的变化值减小,表现为操纵灵敏度下降。
5 控制方法研究
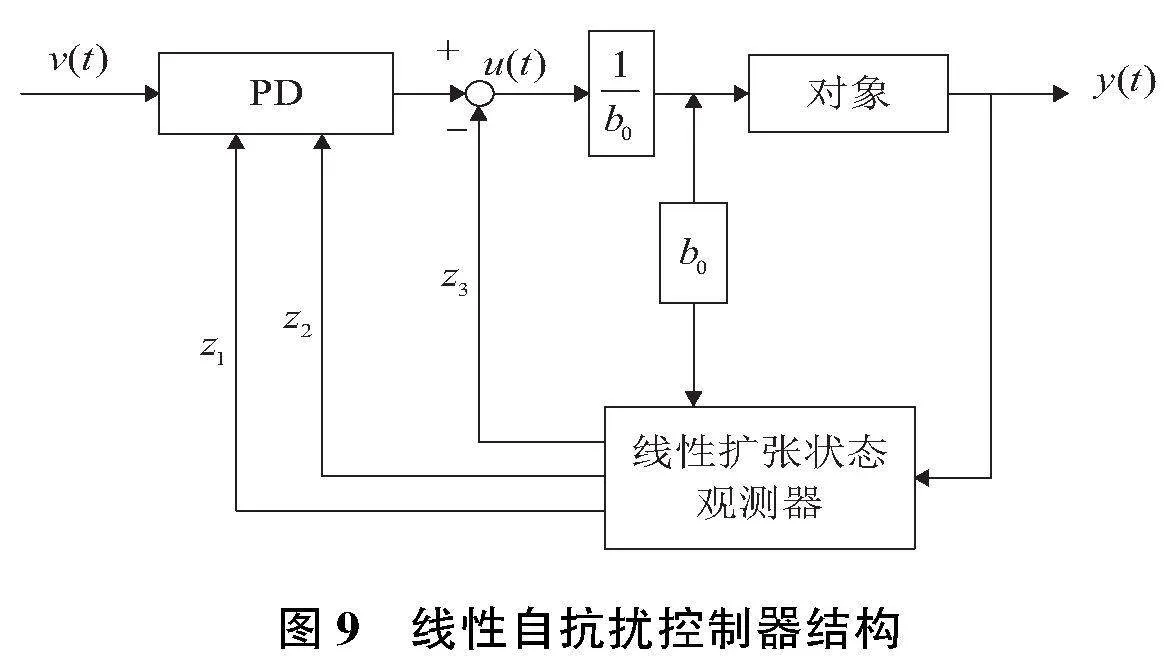
传统无人直升机控制采用的是PID控制,多年来在工程实践中广泛使用,但是PID控制在抗扰方面表现得较为乏力。自抗扰控制器(ADRC)采用以下策略对上述传统PID所面临的一些缺陷进行了改进,很好地提高了控制器的性能,使控制效果更优,其主要由跟踪微分器、扩张状态观测器和非线性状态误差反馈控制律三部分组成[8]。
自抗扰控制的一个不足就是控制器内需要整定的参数多且难以整定,并且非线性反馈的参数比线性反馈(LSEF)更加难整定,因此本文基于LADRC进行无人直升机内环控制器的设计。所使用的线性自抗扰控制器结构如图9所示。
5.1 线性扩张状态观测器(LESO)
以二阶被控对象为例,设被控对象:
式中:x为原系统中待观测的状态;y为系统的输出;u为系统的输入;w为系统运行时遇到的扰动;b用来表示输入总增益。为了描述出系统的未知增益部分,将总增益中已知增益部分用b0表示,所以上式可改写为
5.2 线性状态误差反馈控制律
由式(14)可以看出,LESO可以起到估计扰动与误差的作用,所以可将传统的PID进行简化,舍去不需要的积分控制,所以LSEF可写成如下形式:
u0=Kp(v-z1)-Kdz2(16)
式中:v为设定的目标值;z1、z2为LESO输出的状态;Kp、Kd分别为比例P与微分D的增益。
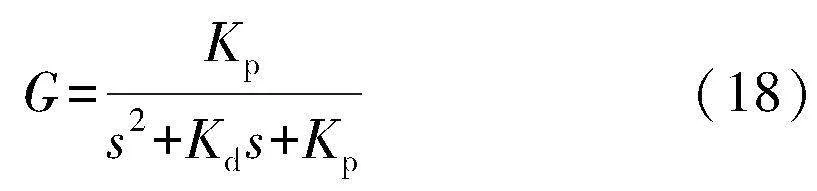
对上式进行降阶简化后可以表示为
如此一来,闭环传递函数就成了一个无零点的二阶传递函数系统:
令Kp=w2c ,Kd=2wc,这两个参数都由控制器带宽wc决定,因此只需要改变带宽wc,就能够确定线性状态误差反馈控制律。
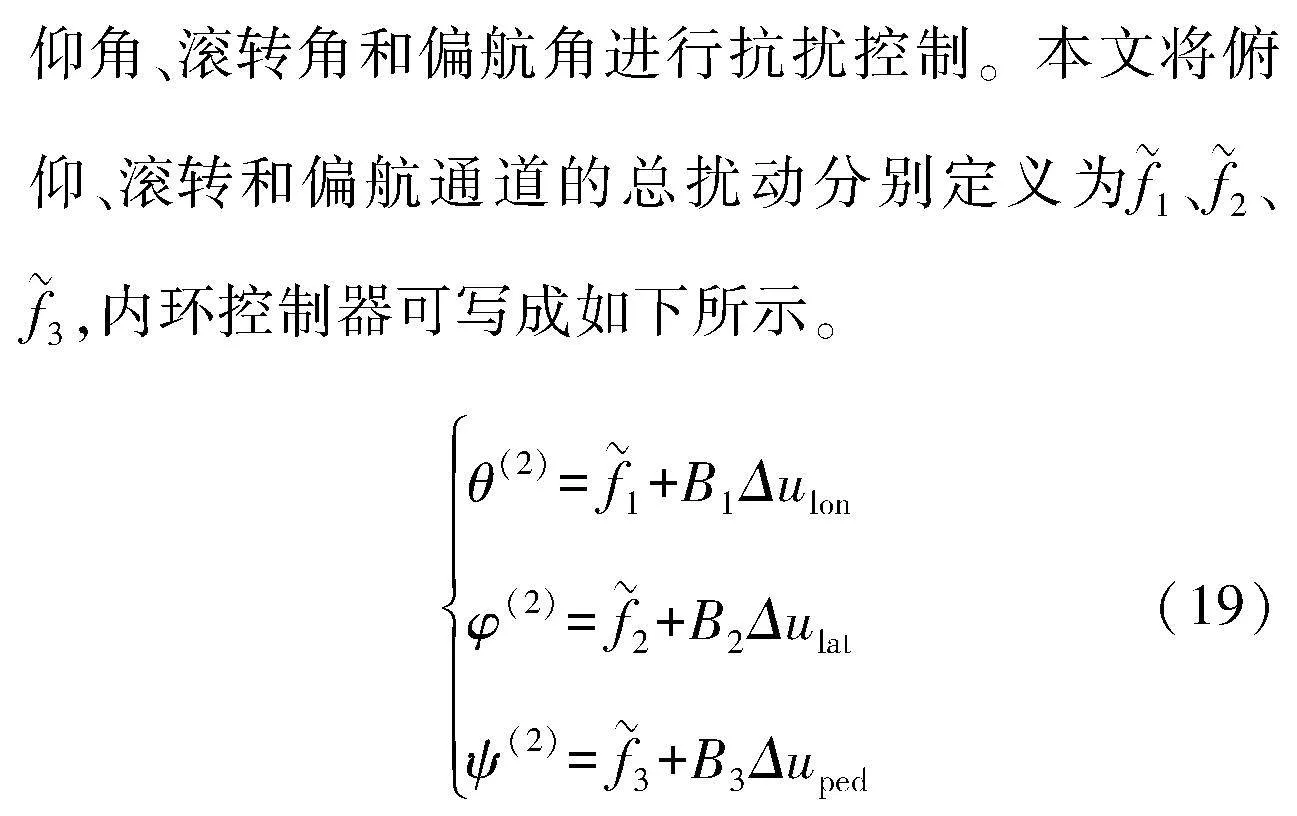
5.3 内环控制器设计
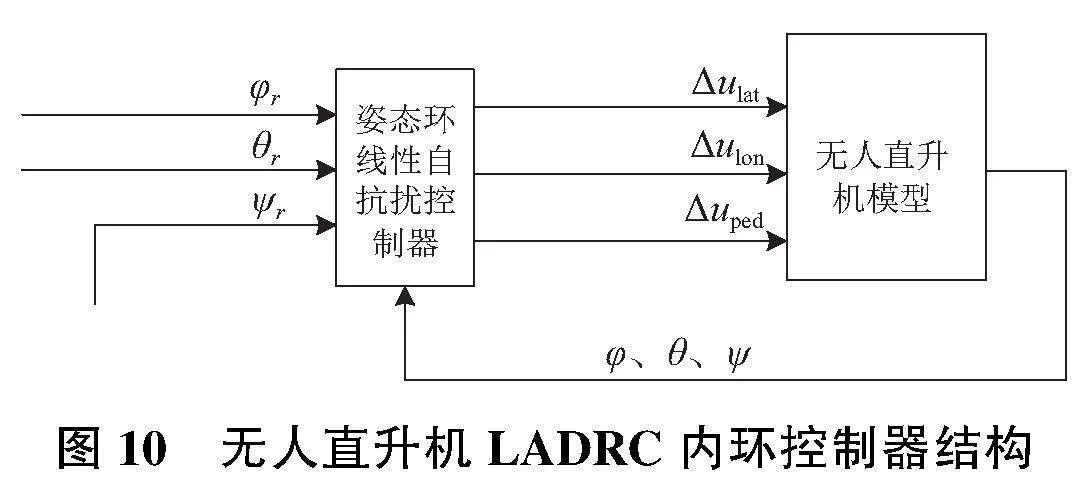
内环控制(姿态控制)对于飞行器而言是至关重要的一部分。由于飞行器的特殊性,在飞行过程中保持正确的姿态是其维持正常工作的基本条件[9]。线性自抗扰控制器能够估测出系统的总扰动,再通过反馈控制律对系统进行扰动补偿。本文分别对俯仰通道、滚转通道、偏航通道设计了一个二阶的线性自抗扰控制器对无人直升机的俯
式中B1、B2、B3分别表示所要设计的各个通道的已知通道增益。所以本文所要设计的基于线性自抗扰内环控制器的结构框图如图10所示,φr、θr、Ψr分别为滚转角、俯仰角、偏航角的参考值。
6 仿真验证
本文在Simulink仿真环境下基于无人直升机线性化模型组,以悬停、前飞10m/s状态为例,观察该无人直升机姿态指令的跟踪效果。俯仰角、滚转角和偏航角的响应曲线如图11、图12所示。
由图11、图12所示的3个速度状态下的3个通道的指令响应曲线可以看出,LADRC的收敛速度较快,超调小且没有误差,相比PID有较好的控制效果。
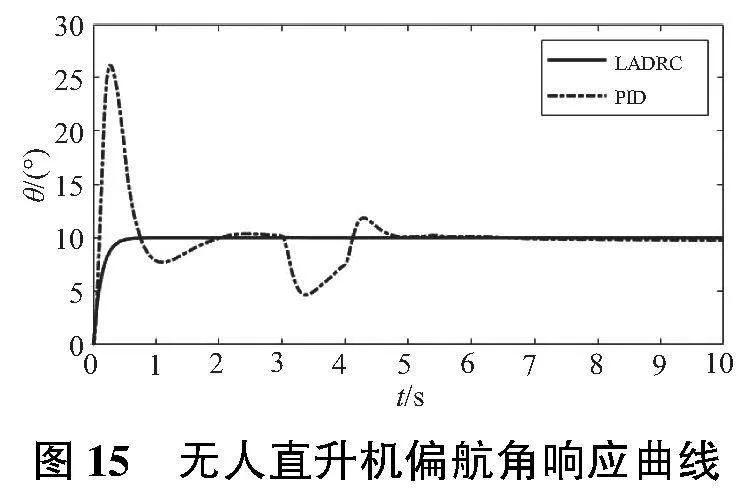
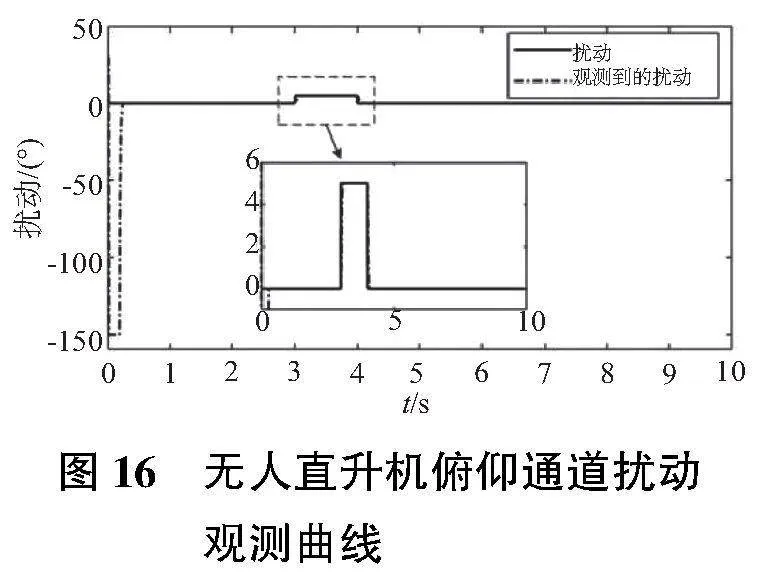
以直升机悬停状态为例,在3s时刻分别给定直升机的俯仰、滚转和偏航通道幅值5°、持续时间为1s的变距干扰,观测3个通道的抗扰效果。由图13—图15可以看出,常规PID控制方法在扰动来临时,无人直升机姿态晃动较大,且需要很长时间才能恢复到原有平衡状态,而在LADRC控制下的姿态几乎没有收到什么影响。
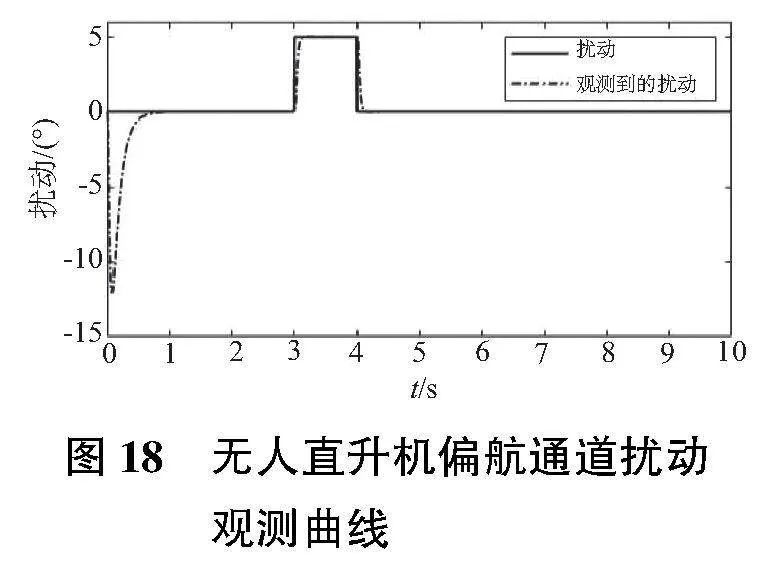
图16—图18为扰动来临时,LADRC中LESO对扰动的观测情况。
由图16—图18观测曲线可知,LESO可以很好地观测到扰动,进而通过估计补偿抵消扰动带来的影响,从而起到抗扰的效果。
7 结语
本文基于某型号无人直升机完成了无人直升机建模、特性分析和内环控制器设计等流程,通过仿真结果对比,本文所设计和实现的直升机内环控制器可以加强姿态回路的鲁棒性和稳定性,达到了预期的效果。
参考文献:
[1] 王鹏.无人直升机发展现状及技术难点[J].计算机产品与流通,2018(1):91-92.
[2] AHMED B,KENDOUL F. Flight control of a small helicopter in unknown wind conditions[C]//49th IEEE Conference on Decision and Control (CDC). Atlanta,GA,USA:IEEE,2011:3536-3541.
[3] LAI Y C,LE TRI Q. System identification and control of a small unmanned helicopter at hover mode[C]//2017 2nd International Conference on Control and Robotics Engineering (ICCRE). Bangkok,Thailand:IEEE,2017:92-96.
[4] 王云霞,代冀阳,王村松,等. 一种线性自抗扰控制器的无人直升机姿态控制方法研究[J]. 计算机应用研究,2019,36(6):1753-1757.
[5] 王云霞. 基于线性自抗扰控制的无人直升机路径跟踪方法研究[D]. 南昌:南昌航空大学,2018.
[6] 尹亮亮. 无人直升机飞行控制若干关键技术研究[D]. 南京:南京航空航天大学,2012.
[7] 缪丽娟. 小型无人直升机悬停与低速段飞行控制律研究[D]. 南京:南京航空航天大学,2014.
[8] 韩京清. 自抗扰控制技术[J]. 前言科学,2007(1):24-31.
[9] 刘泽群. 无人直升机飞行控制及视景仿真实现[D]. 南昌:南昌航空大学,2019.
