
无人机精确着陆控制技术研究
2024-08-31 00:00:00郑金豪黄一敏王姝琪
机械制造与自动化 2024年3期






摘 要:固定翼无人机着陆性能是限制其发展的重要因素,提升其着陆性能有重要的现实意义。聚焦于着陆中的浅下滑段,对固定油门的传统着陆控制方法进行分析并指出其存在的缺陷。通过姿态、速度和下沉率关系引出过程速度控制和末端速度控制的必要性,提出油门速度闭环控制方案。该方案解决了触地姿态安全问题,大大提高了着陆的精度。
关键词:固定翼无人机;精确着陆;姿态敏感性;速度控制
中图分类号:V249文献标志码:B文章编号:1671-5276(2024)03-0249-06
Longitudinal Control Strategy for Precision Landing of UAV
Abstract:Since the landing performance of fixed wing UAV is an important factor limiting the development of UAV, it is of great practical significance to improve its landing performance. This paper focuses on the shallow glide section of landing, analyzes the traditional landing control method with fixed throttle, and indictes its shortcomings. The necessity of process speed control and terminal speed control is derived from the relationship between attitude, speed and sink rate, and a closed loop control scheme of throttle speed is proposed. The scheme solves the problem of touchdown attitude safety and greatly improves the landing accuracy.
Keywords:fixed wing UAV; precision landing; attitude sensitivity; speed control
0 引言
对象无人机为常规气动布局大展弦比无人机,采用左右双发动机布局。最大起飞质量为2 300kg,全机长约12m,翼展为13m,高约3m。襟翼共有3档,只能向下偏转可开0°、20°、42°,襟翼开42°时的大阻力比较适合着陆减速。停机角达到2°,对触地俯仰角有较高要求[1]。
对象无人机已完成多次飞行,但飞行效果不佳。虽能完成着陆,但触地俯仰角小。其使用的传统着陆控制策略在浅下滑段采用固定油门和俯仰角闭环拉起的控制策略。在传统控制策略的浅下滑段,实飞和非线性实时仿真中均存在姿态-速度敏感性,导致触地姿态小;而固定油门单纯依赖自身减速性能进行减速的方式鲁棒性差,影响浅下滑过程速度一致性,使得下沉率曲线质量差,最终导致触地精度效果不佳。故油门-速度控制方案成为了解决姿态安全和触地精度的最优手段。
本文聚焦于浅下滑段,从传统着陆控制方案出发,首先剖析姿态-速度敏感性,引出末端速度控制的必要性;其次从飞行动力学角度分析姿态、空速与下沉率之间的关系,提出过程速度控制对改善下沉率曲线质量的必要性。最终提出速度-油门的闭环控制方案。该方案解决了触地姿态安全问题,大大提高了着陆的精度。
1 着陆轨迹描述与分析
1.1 着陆轨迹描述
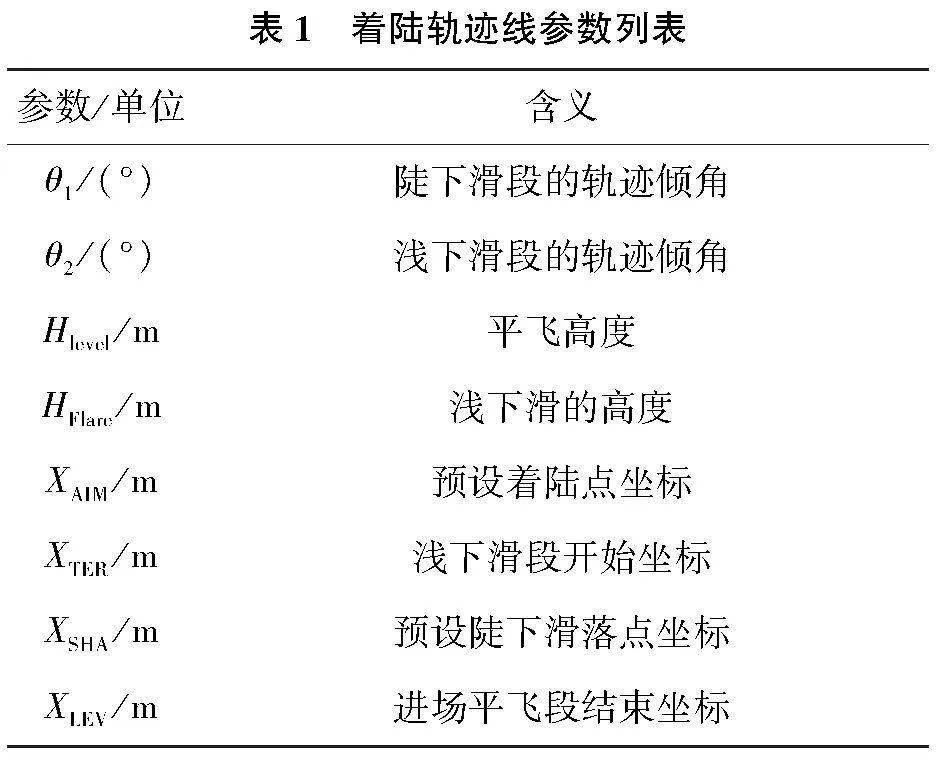
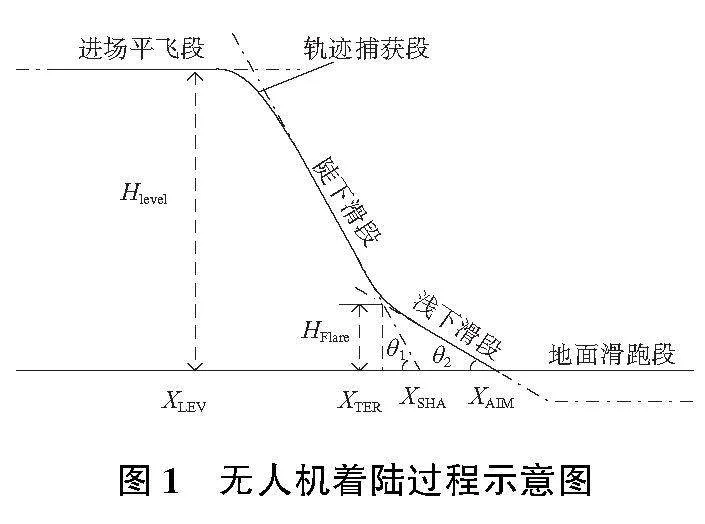
经过多年设计经验积累,本实验室已有一套成熟的固定翼无人机着陆轨迹流程。当对象无人机在完成预定飞行任务后进入着陆回收阶段,整个着陆回收过程依次分为进场平飞段、轨迹捕获段、陡下滑段、浅下滑段以及地面滑跑段[2-3],其高度剖面图如图1所示,着陆轨迹线参数如表1所示。
如图1所示,图中点划线为不同阶段的预设高度指令轨迹线,而实线则为无人机实际飞行轨迹线。无人机基本按照预设轨迹线飞行,当进行阶段切换时,为保持对下一阶段的跟踪性,可能提前切入下一阶段轨迹,进行平滑过渡,导致预设轨迹与实际轨迹部分不重合。
无人机的着陆过程分为多个阶段,为简化轨迹线的设计,将轨迹线简化为各个阶段的直线并省去了各阶段的过渡过程。其中无人机的进场平飞段为高度300m的水平直线;无人机的陡下滑段表现为斜率较大的斜线;浅下滑段则表现为斜率较小的斜线。由于地面效应存在,浅下滑段轨迹线通常延伸至地下10m[4]。
无人机的着陆轨迹线本质上是无人机当前位置到预设着陆点之间的待飞距和高度的对应关系。无人机的着陆轨迹线可表达成待飞距与高度之间的分段函数,其数学表达式如式(1)所示。
1.2 传统着陆纵向控制策略
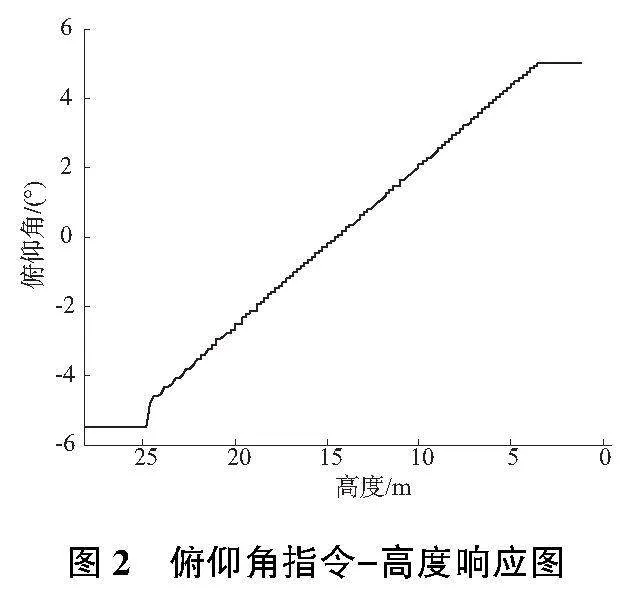
传统着陆控制策略的浅下滑段使用俯仰角比例积分控制,油门采用固定油门。其中俯仰角指令采用高度-俯仰角指令的计算方法,随高度减小俯仰角指令线性拉起直至5°,俯仰角指令如式(2)所示,俯仰角-高度关系如图2所示。
θc=θland+K(HEXP-H)/HEXP(2)
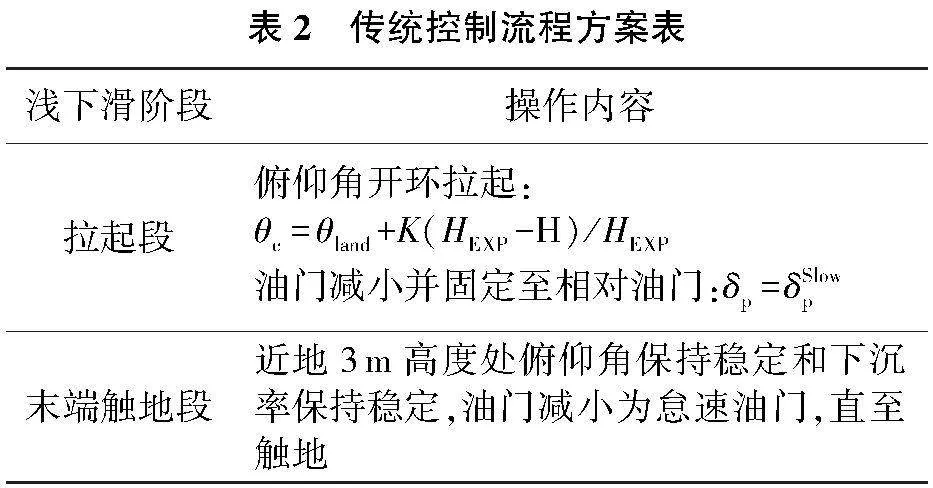
该控制方案依赖42°襟翼带来的大阻力进行减速,通过姿态角的线性拉起配合其减速特性使下沉率快速拉起并稳定在-1m/s左右。当离地3m时,将油门进一步减小至怠速油门,进一步增加触地姿态角。传统控制流程方案如表2所示。
2 问题描述与机理分析
2.1 速度-俯仰角敏感问题
对象无人机采用传统着陆控制策略,以20°、42°襟翼分别完成着陆,两次着陆存在同一个问题——触地俯仰角小,仅有3°。而该机停机角为2°,俯仰角安全裕度不足,严重影响着陆安全。
在鲁棒性验证中,当无人机存在不确定性及受到外部干扰导致触地速度不同时,相对应的俯仰角也随之变化。这可能说明对象无人机在低速情况下,速度与俯仰角存在很强的负相关性,即速度越大,俯仰角越小。而实飞数据恰恰证实了这一点,实飞着陆时触地速度偏大,触地俯仰角偏小,与鲁棒性验证情况相吻合[5]。
2.2 敏感性分析
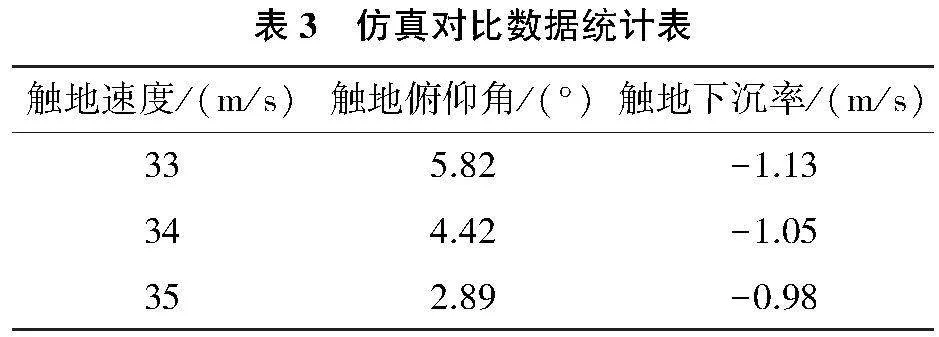
1)针对着陆速度进行仿真测试。选取33m/s、34m/s、35m/s 3个速度进行控制律调试,使下沉率基本保持在-1m/s。在只改变触地空速的情况下,观察触地俯仰角情况,其飞机着陆姿态与速度关系如表3所示。
由表3可得,仿真测试时,在下沉率接近的情况下,触地速度对对象无人机姿态有很大的影响,1m/s速度差导致俯仰角相差1.4°左右。
2)对无人机进行配平线性化。取下沉率为-1.0m/s,对33m/s、34m/s、35m/s进行配平线性化,其结果如表4所示。
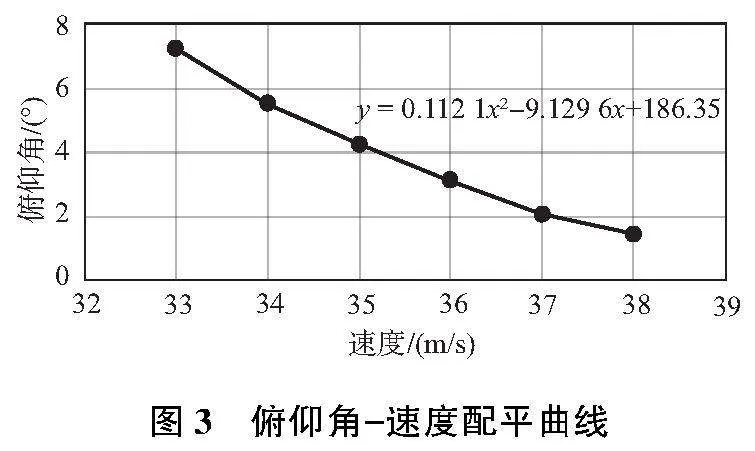
由表4可得,在相同下沉率下,1m/s的速度差将会带来1.2°的姿态差。将配平范围扩大到速度33~38m/s,将其速度与俯仰角对应画出并进行拟合,得到图3。
由图3可得,俯仰角-速度曲线可拟合为一个二次函数,随着速度的减小,曲线斜率逐渐增加,即俯仰角-速度变化率增加,敏感性增加。当速度小于36m/s时,进入速度敏感区,此时俯仰角-速度变化率达到1°/(m/s)。故在配平线性化中仍存在速度-俯仰角敏感现象。
综上所述,配平线性化是一个平衡态,即“静态”。仿真过程中着陆是一个不断变化的过程,即“动态”。前文从静态、动态两方面入手,发现对象无人机在低速情况下均存在速度-俯仰角敏感问题。相同的下沉率下1m/s的速度差会带来1.2°的姿态差,这是不被允许的。
首先对该现象进行分析,升力由动压、升力系数、参考面积三方面决定[6]。速度减小会导致动压减小,飞机需要更大的主升力系数维持升力。而主升力系数与迎角基本呈线性增长趋势,更大的主升力系数需要更大的迎角。速度与迎角呈线性减小趋势正常,但变化率达到1°/(m/s)以上,则说明速度敏感区间对应的迎角-主升力系数曲线增长缓慢。
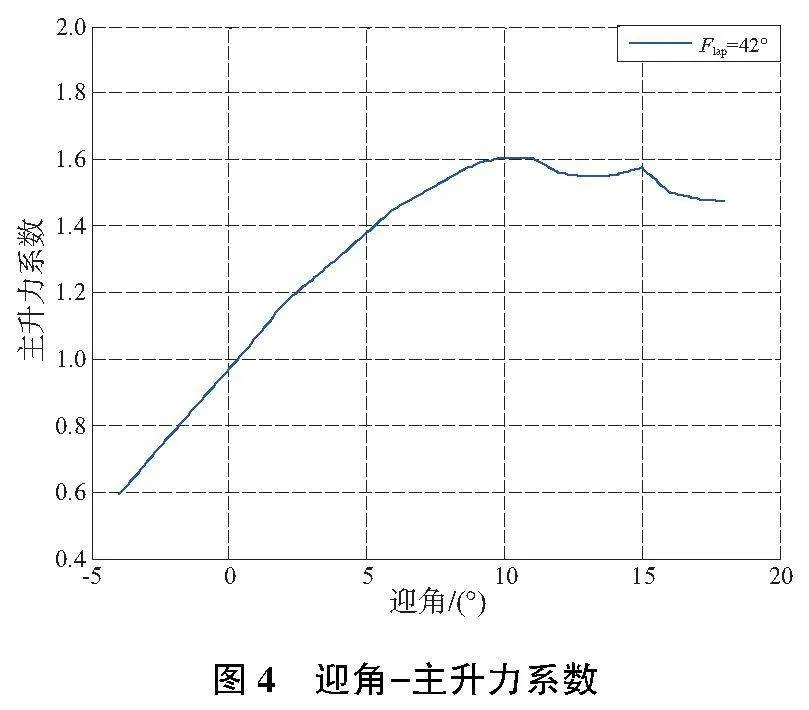
该飞机采用基于气动数据的机理法建模[7],主升力系数主要由机身、襟翼、起落架决定,将3项进行累加得到42°襟翼下的迎角-主升力系数曲线如图4所示。
上述的速度敏感区间为32~35m/s,对应的迎角为4.2°~7.2°。由图4可得此时的迎角-主升力系数斜率相比之前减小,主升力系数随迎角增加放缓。
综上所述,该飞机迎角-主升力系数曲线在迎角超过2°后主升力系数增长速度变缓,而敏感速度区间对应迎角正处于该范围内。当速度减小需要更大主升力系数时,就需要更大的迎角,导致出现了速度-迎角敏感区间。且根据图3,速度越小,该现象越明显。此为对象无人机的特性。
该飞机着陆速度区间正好处于速度-俯仰角敏感区间内,无法通过回避的方式来解决,只能对速度进行控制,以此来减小该现象对着陆的影响。这为接下来的控制策略设计提供了明确思路。
3 油门速度控制策略
3.1 浅下滑特性分析
浅下滑控制设计的目的是实现俯仰角达到预期指令并保持对下沉率的稳定控制,同时需要保证对其他纵向状态维持在合理的范围内。在纵向状态量中,俯仰角、下沉率、前向速度之间存在强烈的耦合[8]。升降速度会随着姿态角的拉大而增加,也会随着速度的减小而降低,如果两者产生的效果能相互抵消,就能保持下沉率的稳定。当油门固定不变时,浅下滑段速度在逐渐减小,仅靠单独拉起俯仰角是可以实现下沉率的稳定效果,传统着陆控制律便是如此设计俯仰角单通道控制的。但该种方案存在两方面的问题。
1)极其依赖对象无人机的减速性能,在固定油门下减速性能基本固定,因此为了保证下沉率需对俯仰角拉起速率进行设计。姿态角速率固定导致末端姿态角指令的大小与浅下滑决断高度相关,在此基础上使俯仰角指令在空中达到预期值并保持至落地,需要增加决断高度。而姿态达到预期固定时速度仍在减小会导致末端下沉率降低,即为保持姿态需要增加决断高度并损失末端下沉率质量。
2)浅下滑段速度易受环境因素影响,当存在风干扰、升阻比系数以及发动机推力等因素时,浅下滑减速效果会受到明显的影响,影响下沉率曲线质量,甚至影响飞机着陆安全。
接入速度控制后,姿态控制只考虑俯仰角指标,下沉率稳定则通过速度控制来解决,通过速度减小配合固定的俯仰角增加来稳定下沉率,即需要对浅下滑过程中的速度进行控制。
上文提到对象无人机存在俯仰角-速度敏感性,在同一下沉率下速度的变化对俯仰角有巨大的影响,速度变化1m/s对应姿态变化1.2°。为保证末端的俯仰角安全,需要对触地时的速度进行控制。
基于上述两点理由,浅下滑阶段需在大部分时间接入速度控制,即通过速度指令软化对减速效能进行控制,也通过末端速度指令对末端速度进行控制。
3.2 速度控制方案设计
1) 速度接入时机设计
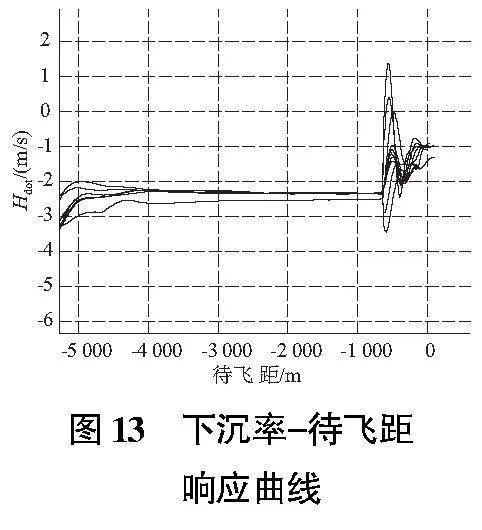
速度控制应在浅下滑过程的大部分时间中接入,需要对接入的时机进行选择。首先在固定油门下以前文改进的俯仰角控制进行着陆,基于下沉率曲线对速度控制接入进行选择。图5为下沉率响应曲线。
由图5可得,在俯仰角拉起前期由于速度较大,下沉率随着俯仰角拉起快速增加至-0.7m/s后开始缓慢减小,此时进入相对稳定段,持续6s后下沉率快速减小。此时对应空速为36m/s,其速度变化率已经过大,导致下沉率无法维持,需要接入速度控制。可通过速度指令软化的方式维持速度变化率,以此来稳定下沉率。由于油门反应较慢,需要提前接入油门-速度控制来维持,故设计接入速度为38m/s。
浅下滑过程中的速度需维持一定的速度下降率配合固定的俯仰角拉起速率来稳定下沉率,根据图5可得前期速度减小率与俯仰角拉起速度配合较为合适,能维持下沉率在-1m/s左右,后续速度下降率过大导致下沉率无法维持。前期减速速率为1.5m/s,由此设计速度指令软化也为1.5m/s,直至末端指令速度。
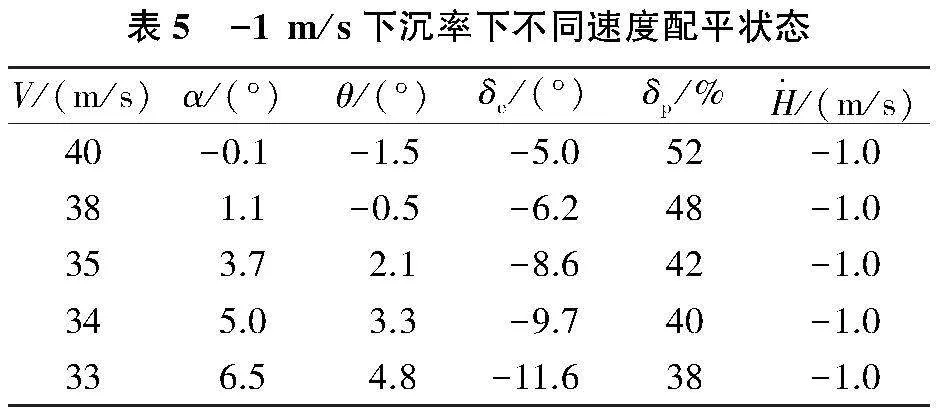
末端速度的大小需要根据配平进行选择,表5为-1m/s下沉率时不同速度下的配平状态。
根据表5的速度-俯仰角对应关系,选择33m/s作为末端速度。至此,油门-速度控制的切入速度、末端速度、速度指令软化速率均已确定,在此基础上给出油门速度控制方案如表6所示。其中:ThetaCmd=IthetaCmd表示指令俯仰角、指令积分俯仰角,分别对应公式(4)的符号θcmd、Iθ,cmd;Vcmd为指令速度。
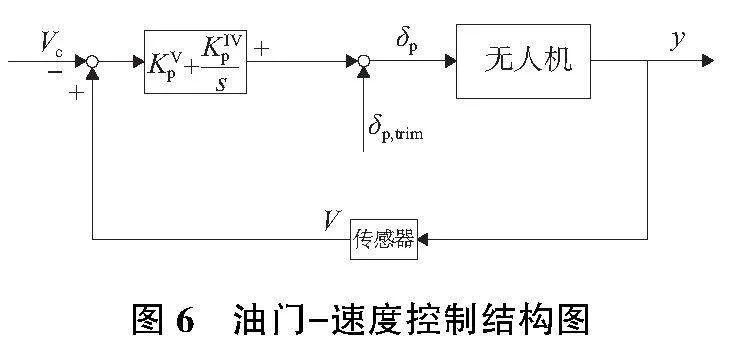
2) 速度控制结构设计
油门速度控制结构参考平飞段,采用PI控制,该控制方案能够有效地消除净差。控制律结构如式(3)所示。控制结构如图6所示。
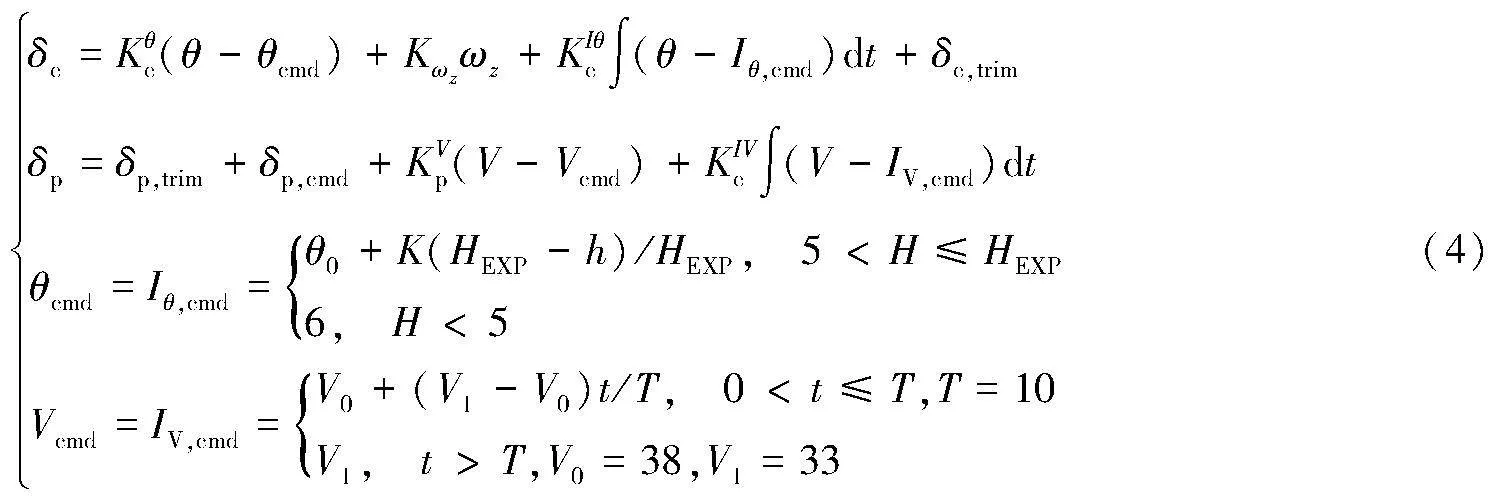
对象无人机浅下滑段完整的纵向控制律如式(4)所示。
3) 抗风性验证
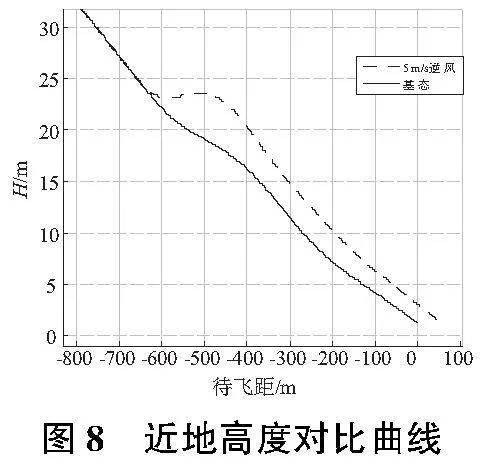
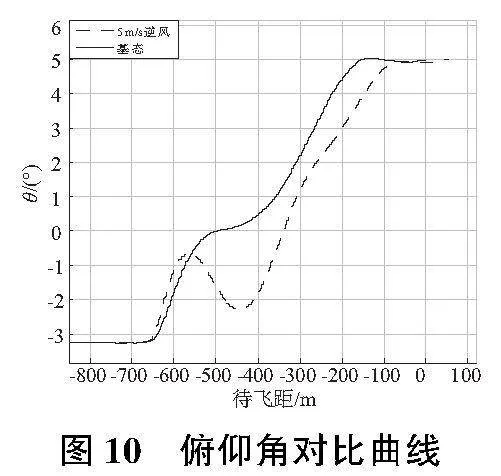
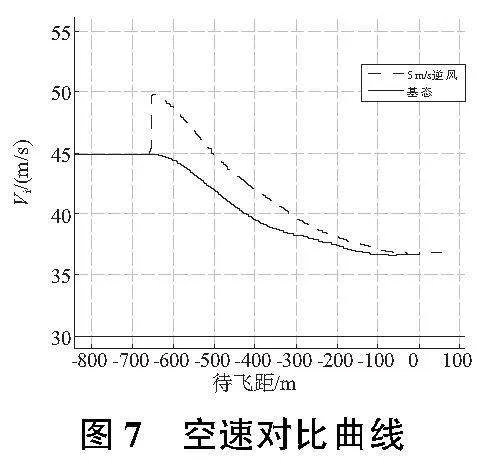
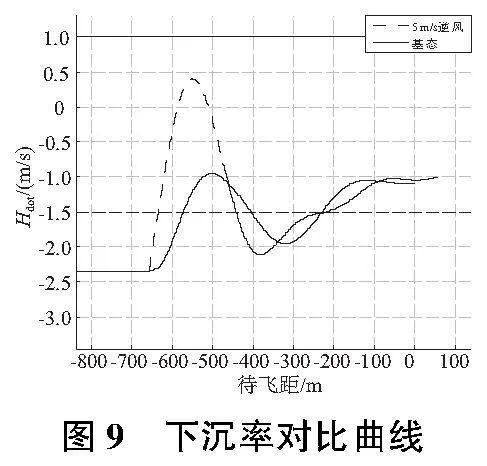
众所周知,升力由速度、迎角决定,而俯仰角-速度控制对于末端俯仰角、速度进行控制,使得俯仰角、速度固定。低速状态下,俯仰角与迎角可认为近似相等。故俯仰角-速度控制方案的升力基本固定,近地时飞机近似处在平衡态。对于间接升力影响的干扰,即风干扰、阻力系数干扰等,均是通过影响姿态、速度来间接影响升力,而俯仰角-速度控制使得俯仰角、速度有良好的一致性,使得间接升力影响下的触地精度较高。图7—图10为5m/s风干扰下的近地响应图。
由图7—图10可得,当浅下滑受到风干扰时,空速瞬间增大至50m/s,下沉率曲线随之响应迅速增大直至拉飘。由于浅下滑初期采用小油门快速减速直至40m/s的策略,空速随之快速减小,趋势与基态曲线一致;而俯仰角指令采用随高度线性拉起的方式,随着拉飘,俯仰角指令减小,使无人机低头;空速的快速减小与俯仰角的减小,或在两者共同作用下,下沉率随之减小,结束了拉飘状态。在待飞距300m处,空速减小至40m/s,接入油门-速度控制,速度平缓软化,与俯仰角拉起配合,使下沉率稳定在-1m/s附近,以稳态触地。
在着陆过程中,无人机俯仰角拉起,空速减小,二者配合使得下沉率稳定,风干扰导致空速变化,两者无法配合,使得下沉率超限。而空速控制正好解决该问题,在风干扰下依旧使得空速以预定指令软化并维持,保证了与俯仰角的配合,解决了安全性问题。
众所周知,风干扰引起的触地误差主要源于空速改变导致下沉率的变化,使得无人机滞空时间改变。而俯仰角随高度响应和空速控制能快速使下沉率迅速反应,解除拉飘、掉高现象,使滞空时间趋于一致,5m/s常值风干扰下触地误差仅为55m。
对于真实无人机,其飞行过程中最大干扰因素便是风,如在着陆状况时常常发生风干扰。该方案对于风的鲁棒性极高,故该方案适用性较强。
4 仿真对比与分析
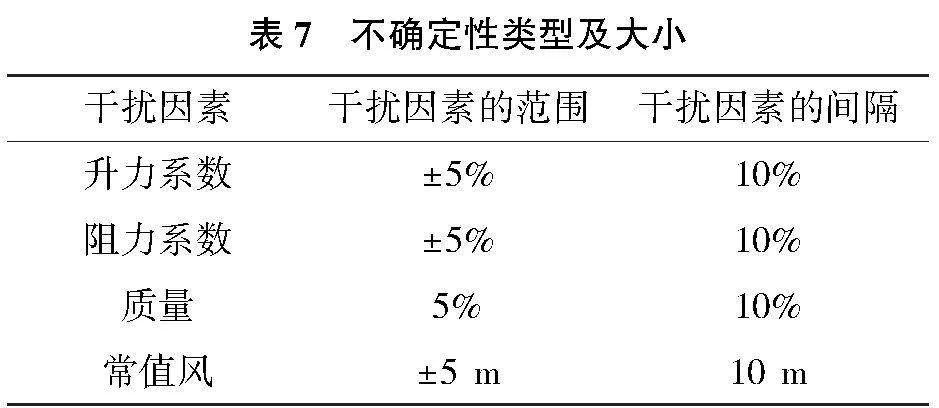
表7给出了着陆精度仿真的不确定性类型和大小。
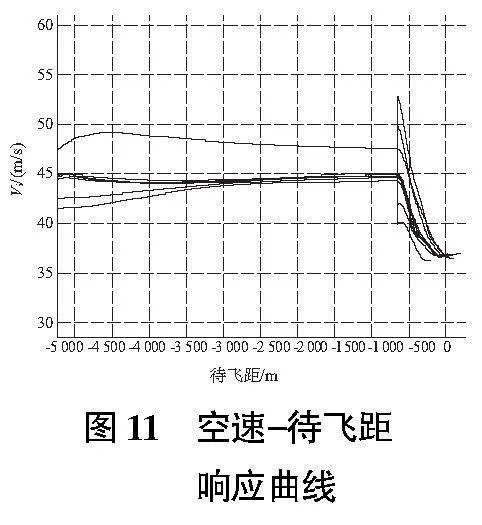
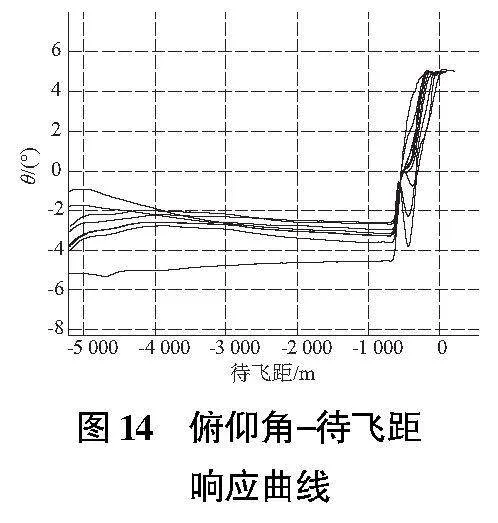
基于非线性实时仿真平台仿真结果如图11—图14所示。
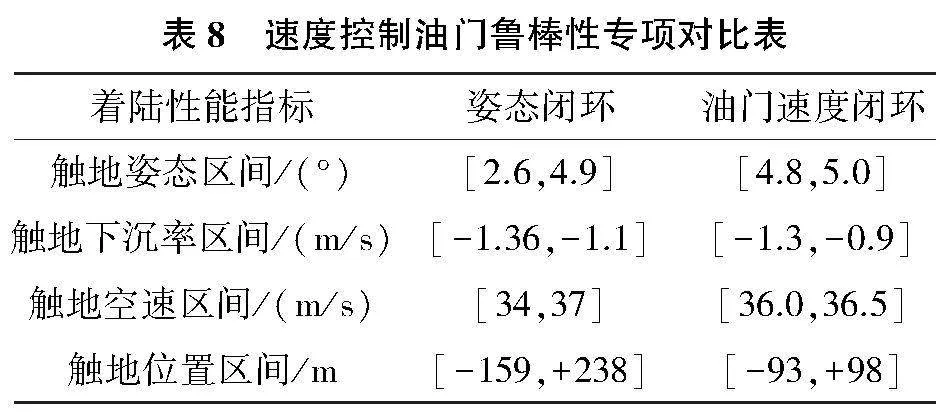
与传统着陆控制相比:整个着陆过程的一致性有明显的提升,其中着陆速度一致性得到了明显的提高,受速度影响极大的触地姿态质量随之提高,充分体现了速度控制的优势。触地速度误差仅在±0.5m/s内,触地俯仰角均能达到4.8°以上,姿态安全得到充分保障;触地下沉率波动不大,触地精度也得到了巨大提升(由[-159,+238]m提升至[-93,+98]m)。其触地数据对比如表8所示。
油门速度控制将速度这一关键因素稳定,过程速度控制通过特定的速度指令软化使下沉率曲线质量与俯仰角拉起剥离,使得着陆过程的一致性得到了极大地提升;末端速度控制使得触地速度稳定,触地姿态一致性也得到了提升,这也与之前速度-俯仰角敏感性结论相吻合。现将速度控制优势总结如下:
1)姿态安全得到解决;
2)提升整个着陆过程中的状态一致性;
3)通过稳定下沉率曲线质量,使得触地精度得到提升,由“百米级”提高到“十米级”。
5 结语
本文从对象无人机在多次着陆过程中的实际问题出发——触地姿态小、触地精度低,通过非线性仿真与气动数据分析,揭示浅下滑段速度-姿态的敏感关系以及下沉率曲线质量与触地精度关系。通过剖析浅下滑段的空速特性,得到空速、姿态、下沉率的耦合特性。创新性地提出油门-速度闭环控制方案,通过特定速度指令软化稳定下沉率质量,控制末端速度提高姿态一致性,同时解决姿态安全问题和触地精度问题。姿态安全得到保证,触地精度得到显著提高。
经非线性实时仿真与实飞验证,该控制策略较传统控制策略有很强的稳定性和易操作性,将作为实验室解决首飞着陆问题的主要技术方案。
参考文献:
[1] 吴森堂,费玉华. 飞行控制系统[M]. 北京:北京航空航天大学出版社,2005.
[2] 郭艳艳,陈澜,杨常伟. 无人机着陆抗风鲁棒H_∞控制器设计研究[J]. 计算机测量与控制,2010,18(2):348-350.
[3] 张蒙. 大展弦比无人机安全着陆纵向控制技术研究[D]. 南京:南京航空航天大学,2017.
[4] 黄筱莺. 高超声速飞行器助推段纵向控制技术研究[D]. 南京:南京航空航天大学,2019.
[5] 宋辉. 复杂条件下无人机自动着陆控制技术研究[D]. 南京:南京航空航天大学,2011.
[6] 金伟. 小型双发固定翼无人机飞行控制系统设计[D]. 上海:上海交通大学,2019.
[7] 段鹏,郑金豪,吕健玮. 无人机短距着陆纵向控制策略设计[J]. 机械制造与自动化,2022,51(2):186-189,194.
[8] FAN Y M,DING M,CAO Y F. Vision algorithms for fixed-wing unmanned aerial vehicle landing system[J]. Science China Technological Sciences,2017,60(3):434-443.
