
基于动态智能算法的嵌入式计算机软件测试研究
2024-07-14 03:53:44霍晓旭
赤峰学院学报·自然科学版 2024年6期
关键词:计算机软件
霍晓旭
摘 要:本文主要研究动态智能算法在嵌入式计算机软件测试中的应用效果。本文采用DMC动态智能算法进行建模分析,判断静态性能与动态性能之间的矛盾比,将其设计在DMC-PID系统之中,并依据验证软件测试的理论结果,进行嵌入式计算机软件测试。结论表明应用了动态智能算法的嵌入式计算机软件测试在串级DMC-PID工业蒸汽温度控制系统中运行稳定,控制效果良好。
关键词:嵌入式动力学;动态智能算法;计算机软件;测试应用
中图分类号:TP311文献标识码:A文章编号:1673-260X(2024)06-0047-03
随着微电子和信息网络技术的快速发展,计算机产业革新越来越具有吸引力。其特征体现在市场对计算机技术创新的需求保持持续增长态势[1]。
随着网络技术的进步,单一化的应用软件系统管理,已经难以满足业务流程的安全性和可靠性要求[2]。现阶段,基于ARM(Advanced RISC Machine)的嵌入式系统凭借着低功耗、CPU架构简单、高性能、使用嵌入式网络接口等优势广泛应用于众多领域[3]。
目前,越来越多的学者致力于研究动态智能算法。例如蝙蝠振动算法(DVBA)粒子群优化算法(PSO)、蝙蝠算法(BA)、遗传算法(GA)和禁忌搜索算法(TS)[4]。有学者提出了一种具有自动权重修正功能的最优粒子群优化算法,解决了现有计算机系统算法的过早集成和最小优化问题,构建了成本最低、出行延误较短的赤字规划模型[4]。研究嵌入式动态智能算法在计算机软件测试中的应用,可以更好地实现计算机软件中控制功能的优化[5]。
本文将单级倒立摆控制的自适应动态编程算法嵌入到工业蒸汽温度控制系统之中,通过图形用户界面显示控制结果,可以方便地查看到控制效果,并针对不理想的结果进行修改,直到满意为止。此外,在实现对单级倒立摆工艺系统控制的过程中,可以对系统的参数进行修改,或者对智能动态算法进行一些局部修改,从而实现在系统中对其他问题的控制。
1 计算机软件测试中的嵌入式动态智能算法
1.1 嵌入式系统
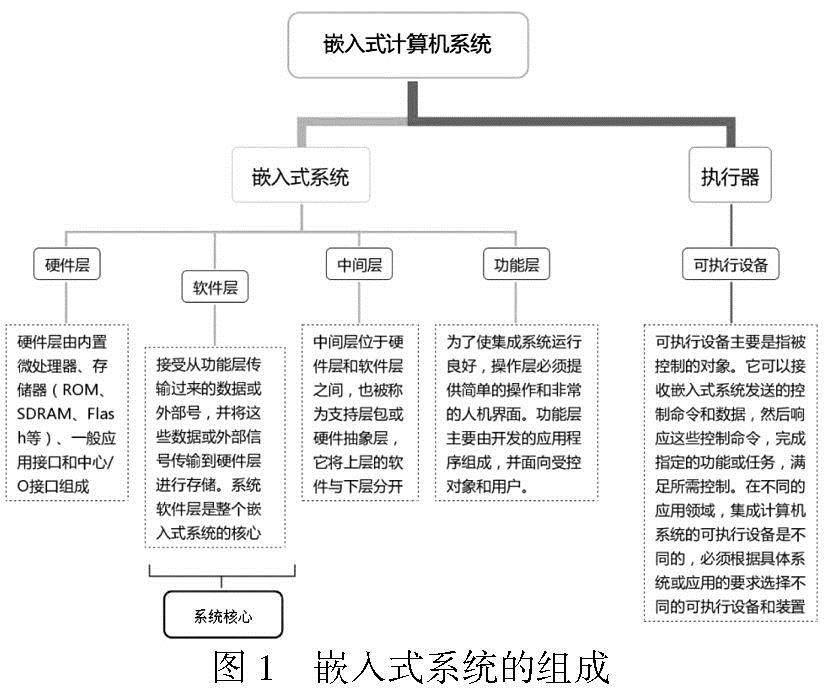
嵌入式系统是一个独立的计算机系统,由执行器和嵌入式系统组成。嵌入式系统由硬件层、中心层、软件层和功能层组成;执行器可以看作是受控对象,接收嵌入式系统发出的控制命令,完成特定的任务或工作[6],具体内容如图1所示。
1.2 动态智能算法
DMC(旋转矩阵控制)算法是一种基于控制对象单步响应的非参数模型的动态智能预测算法。通过反馈修正和旋转,对当前和未来的控制变量进行优化,使输出与预定轨迹一致。强矩阵控制是一种动态智能预测控制算法,它利用被控对象的渐进响应特性来描述系统的功率模型。
1.3 PID控制系统
PID控制系统(Proportional Integral Derivative)主要是指对工业控制过程,可以进行实时数据采集与误差定制自动分析与微分控制的系统。PID控制系统的优势十分明显,其设置原理简单,主要依据数据误差比例的积分和微分差值进行控制计算;其实用性广、鲁棒性强,广泛应用于计算机工艺控制之中。
2 嵌入式动态智能算法在计算机软件测试中的设计方法
2.1 设计原理
观察PID和DMC过程,在一般预测函数指标中输入稳态误差密度,按照PID还原一般预测控制规则,即把算法分解成PID格式,检查PID的预测特性。为了使用两个PID控制系统和一个强矩阵控制,可以将PID控制和DMC控制结合起来,将相应环节中用于约束的场函数改为PID格式,然后开发一个新的PID控制系统。
2.2 系统建设
平台硬件包括系统电源、主控单元、通信单元、空气开关、终端等附件。
主控单元采用低功,计算性能高,集成以太网功能,不使用风扇散热的CPU控制器;具有较强的在线运行能力,能满足高精度、快速采样和实时控制的要求;采用模块化可扩展模式,具有设备扩展能力。
通信单元由通信模块CP(Communication Processor)和通信模块DCS(Distributed Control System)两部分组成。首先通信模块CP利用CPU以MODBUS通讯协议的形式与常规控制系统进行安全数据交互。主控单元直接接收来自常规控制系统控制器的工艺参数,通过常规控制系统向现场发出指令;其次通信模块DCS采用EDPF-COMII模块。该单元是一个智能通信单元,用于测量高速EDPF配电和控制网络。有四个RS485端口,其中两个使用HDLC协议与EDPF-NT DPU通信,另外两个端口可以独立配置103。这对系统与第三方MODBUS应用进行通信非常有用,可以确保电子安全。
2.3 参数选择
动态智能矩阵的高级旋转是通过算法增加对P误差的控制,并通过算法记录控制P的进展,决定强矩阵控制算法控制变量的数量。因此,控制时区的数量应小于或等于M控制变量中预测时区P的值。
如果P值过高或过低,系统测试结果会变差。在选择P值时,应考虑系统的稳定性和速度。控制系统的特性非常复杂,系统的响应电压并不取决于P预测的时间点和系统的功率。在这种情况下,必须根据系统对稳定性和速度的要求来调整P值。
2.4 DMC动态智能算法模型
DMC动态智能算法主要基于线路模拟特性的假设和捕捉演示的动态智能预测模型。作为性能最好的在线监测系统,它获得了滚动优化的弹性保持函数,能够及时计算出搜索信息的分离度,并对分离信息进行反馈和校正。基于阶梯响应的预测模型如公式1所示。
其中N为建模时域,ai为单位阶跃采样值,u(k-i)-u(k-i-1)是在k=i时刻作用于系统的控制增量。实现反馈的目的是使算法的每一步都能根据被控对象的实际状态进行优化。
测量系统的实际结果、实时测量结果为系统获得最佳控制理念提供准确可靠的信息基础。获得的信息不仅可以用于控制系统的预测行为,还包括实际系统中未知的不确定信息。反馈校正用实际误差来校正,如公式2所示。
yc(k+j)=y(k+j)+he(k),j=1,2,…,P(2)
yc(k+j)是反馈修正后得到的新预测值,即初始预测值y(k+j)与经过k时刻通过校正向量修正后输出值的增量he(k)总和。
3 基于动态智能算法的嵌入式计算机软件测试研究
3.1 嵌入式系统的DMC控制器开发
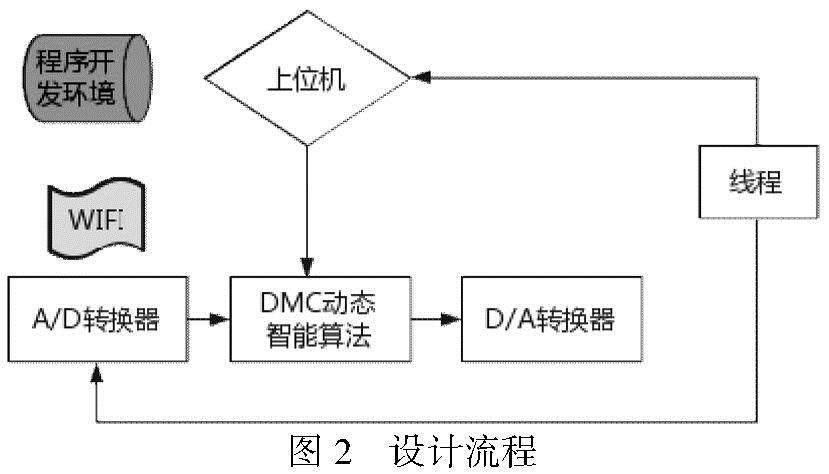
本文利用智能算法测试一款工业蒸汽温度控制器系统,整体测试设计流程如图2所示。其大致可分为后端服务器部分、开发板部分和前端被控对象部分。而主开发板部分包括A/D转换器、DMC动态智能算法、D/A转换器三个环节。
首先,用户通过上位机的图形界面设置开环增益K、时间常数T、延迟时间t等参数,并进行数值设定。其次,设置参数完毕后开始运行下位机程序,A/D转换器实时采集被控对象的输出,通过DMC算法计算出控制量u,并通过D/A转换器将控制量转换为模拟信号,作用于被控对象,被控对象的输出也被发送到上位机的图形界面,并实时显示输出曲线。
最后,在程序运行过程中,并行地启动一个线程,该线程专门负责与上位机服务器建立并保持通信。一旦与服务器成功建立连接,该线程便能接收来自上位机服务器的参数和设定值,并据此更新本地的相应参数和设定。在此过程中,机器将不再接受其原有系统的控制指令。若与上位机服务器的连接发生中断,系统将自动恢复到接受本地机器系统的控制,从而确保控制的连续性和稳定性。
3.2 工业蒸汽温度系统的实时曲线
在系统DCS侧加载初始条件操作,同时将PLC切换到RUN状态进行操作。打开系统应用栏上的实时趋势图标,显示温度实时趋势曲线。将观察点拖到实时曲线窗口,观察其实时数值变化。选择工业蒸汽温度控制系统中的被控对象,识别工业蒸汽温度系统对象的传递函数,获得其动态特性,调整预测控制的参数,以此实现对整个系统的实时监测与控制。
根据调整后的预测控制器,对工业蒸汽温度被控对象进行预测控制,并调整实时曲线界面的上下限和时间轴坐标,得到实时数据,如表1和图3所示。
由此可以看出,项目中工业蒸汽温度的实时曲线与矩阵计算模拟的曲线基本保持一致,控制效果较好,系统运行稳定,可以达到满意的效果。
4 结论
动态智能算法与嵌入式技术的快速发展,加速了计算机系统控制技术的完善。在控制器中运用集成控制技术和智能动态算法已经成为一种控制分析的习惯。
本文结合嵌入式软件的特点,设计了嵌入式组件的软件仿真测试过程与系统建设。通过对局部算法的修改可进一步对工业系统进行实时控制,DMC动态智能算法可以较好地完成软件系统监测,并利用滚动优化来进一步保持测试函数的精确性,值得在工业控制系统中进行推广。
参考文献:
〔1〕葛长伟.嵌入式智能视频监控系统的研究及实现[D].大连:大连海事大学,2012.
〔2〕Divya G, Gummineni M. Implementation of FPGA based Decision Making Engine and Genetic Algorithm (GA) for Control of Wireless Parameters. Advances in Computational Sciences and Technology, 2018, 11(01):15-21.
〔3〕Lin G. Solving Hardware/Software Partitioning via a Discrete Dynamic Convexized Method.WuhanUniversity Journal of Natural Sciences, 2019, 24(004):341-348.
〔4〕邹小花,王渊.基于DDS的机载嵌入式软件仿真自测试方法[J].计算机仿真,2022,39(10):50-53+172.
〔5〕张道兴.嵌入式软件仿真测试系统研究[J].信息技术与信息化,2021,46(12):139-141.
〔6〕齐齐乐.关于嵌入式计算机软件测试关键技术的研究[J].电子制作,2021(21):99-100+78.
猜你喜欢
消费电子(2021年7期)2021-08-10 06:03:55
信息技术时代·上旬刊(2020年1期)2020-09-10 07:22:44
电子制作(2018年16期)2018-09-26 03:27:08
电子制作(2018年1期)2018-04-04 01:48:36
电子制作(2017年14期)2017-12-18 07:08:03
电子制作(2017年10期)2017-04-18 07:22:58
电子制作(2017年24期)2017-02-02 07:14:40
工业设计(2016年7期)2016-05-04 04:02:29
汽车维护与修理(2015年2期)2015-02-28 12:15:57
河南科技(2014年19期)2014-02-27 14:15:24
