甘蓝拔取输送装置设计与试验
2024-06-17 09:58:54杨家豪杜雅刚房欣周成
中国农机化学报 2024年6期
杨家豪 杜雅刚 房欣 周成
摘要:为提高甘蓝收获效率,研制适合我国甘蓝种植模式的收获机械,以测定的“秋甜”甘蓝品种的基础物理特性参数为基础,设计一种可实现甘蓝拔取输送的单行悬挂式收获装置。应用SolidWorks软件对装置三维建模并导入Adams软件进行动力学仿真,得到收获过程甘蓝与螺旋凸棱的接触力和甘蓝摆动垂直度的仿真结果,进行正交组合分析表明:装置的最佳工作参数为机具前进速度0.4m/s、螺旋杆转速300r/min、螺旋凸棱外径70mm、限位间距166mm时,收获甘蓝的垂直度最高,通过田间试验表明该装置收获过程甘蓝的采净率和破损率分别为97.6%、8.24%,收获性能符合预期设计,为研究收获装置样机提供理论基础。
关键词:甘蓝;收获机械;Adams;运动仿真;正交试验
中图分类号:S225.92
文献标识码:A
文章编号:2095-5553 (2024) 06-0032-05
收稿日期:2022年10月1日
修回日期:2022年12月13日
*基金项目:黑龙江省重点研发计划(GA21B003)
第一作者:杨家豪,男,1996年生,四川广元人,硕士研究生;研究方向为现代农业机械设计与试验。E-mail: yjh0112358@163.com
通讯作者:周成,男,1973年生,黑龙江望奎人,博士,研究员,硕导;研究方向为智慧农业与智能装备。E-mail: 03054@zjhu.edu.cn
Design and experimental study of cabbage picking and conveying device
Yang Jiahao1, Du Yagang2, Fang Xin2, Zhou Cheng3
(1. College of Mechanical Engineering, Jiamusi University, Jiamusi, 154007, China; 2. Institute of
Agricultural Engineering, Heilongjiang Province Academy of Land Reclamation Sciences, Harbin, 150000, China;
3. School of Information Engineering, Huzhou Normal University, Huzhou, 313000, China)
Abstract: In order to improve the harvesting efficiency of cabbage, a harvesting machine suitable for Chinas cabbage planting mode was developed. Based on the measured basic physical parameters of the “Autumn Sweet” cabbage variety, a single-row hanging harvesting device that could realize cabbage picking and conveying was designed. SolidWorks software was used to build the three-dimensional model of the device and Adams software was imported for dynamic simulation. The simulation results of the contact force between cabbage and screw convex ridge and the verticality of cabbage swing during harvesting were obtained. The orthogonal combination analysis showed that the best working parameters of the device were as follows: the forward speed of the machine was 0.4 m/s, the screw speed was 300 r/min, the outer diameter of screw convex ridge was 70 mm, and the spacing for limiting displacement was 166 mm, the verticality of harvesting cabbage was the highest, the field test results showed that the harvesting rate and damage rate of cabbage in the harvesting process of this device were 97.6% and 8.24% respectively, and the harvesting performance meets the expected design, which provides a theoretical basis for the study of the prototype of the harvesting device.
Keywords: cabbage; harvesting machinery; Adams; motion simulation; orthogonal test
0 引言
甘蓝起源于地中海沿岸,由于其耐寒、易于种植的蔬菜特性,深受北欧农民喜欢。国外对甘蓝收获机械的研究,已超过百年历史。目前欧美日韩等国对甘蓝收获机械的研究较为成熟,已有甘蓝收获装置在我国出售和试验。国外对甘蓝收获机械的研发设计逐步向智能化、低损化过渡,如日本甘蓝自动收获机[1]、韩国白菜切根姿态自动调整收获机[2, 3]、俄罗斯甘蓝无损收获机[4]以及丹麦MK-1000型无人协作智能甘蓝收获机等,均完成了相应的田间试验,收获效果较为理想。我国甘蓝收获装备研究相对较晚,现阶段高校如甘肃农业大学[5]、东北农业大学[6]、浙江大学[7]和黑龙江大学[8]等,以及科研院所如南京农业机械化研究所[9, 10]和黑龙江农垦科学院工程研究所[11]等设计生产的装置多数处于样机,对甘蓝收获性能试验的研究,暂未投产形成大规模推广阶段。
甘蓝在我国种植面积广泛,是东北、西北和华北地区[12]主要蔬菜之一。据联合国粮农组织(FAO)统计,截至2020年,我国甘蓝种植面积居世界第一。目前甘蓝收获仍是以人工为主,机械为辅;人工收获除成本高外,随工作时间收获效率也会降低,机械化收获是甘蓝生产的必然趋势。但甘蓝的拔取输送是影响机收质量的重要环节,甘蓝的品种、成熟度、垄上生长直线度、行距和株距等都会影响拔取输送工作性能;拔取输送装置的结构参数和运行参数选择也会对收获性能产生显著影响,如拔取方式有引拨铲式、螺旋杆式[11]和圆盘式[13],输送方式有双螺旋杆式[6]和夹持输送式[7],参数选择不合理会导致甘蓝堵塞而引起挤压或切割损伤。
本文以测定的甘蓝物理力学特性参数为基础,对甘蓝拔取输送装置进行设计,并利用Adams仿真软件进行虚拟样机的运动学分析,结合正交试验,明确拔取输送装置最优工作参数,为甘蓝机械收获研发提供参考。
1 甘蓝拔取输送装置结构与工作原理
1.1 整体结构
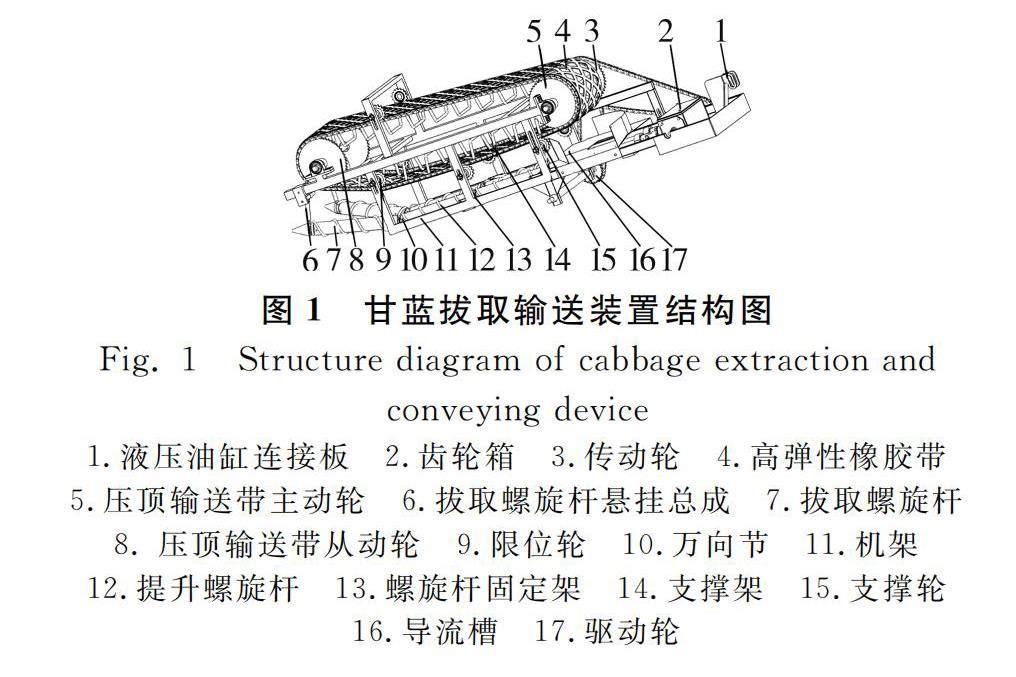
甘蓝拔取输送装置主要由拔取部件、提升输送部件、传动系统和机架等组成,如图1所示。
传动系统包括驱动轮、传动轮、齿轮箱、压顶输送带主动轮和链条等,其中传动轮与压顶输送带主动轮共轴,齿轮箱与提升螺旋杆直接连接;拔取部件主要由悬挂总成和两根不同旋转方向的阶梯轴组成,该轴各焊接一条起始角度相反的螺旋凸棱,为拔取甘蓝提供向上的螺旋提升力,以便甘蓝被快速地从土壤拔出;提升输送部件主要由压顶输送带和提升螺旋杆构成,压顶输送带由链轮结构、支撑架和多条斜向交叉的高弹性橡胶带组成;拔取和提升螺旋杆长度和安装角不同,其余结构参数均相同。装置采用三点悬挂式与机具连接,具备一定的随地仿形能力,而且通过调节限位轮与提升螺旋杆的平行距离能适用于不同尺寸甘蓝的收获,其主要设计参数如表1所示。
1.2 工作原理
机具开始作业前,通过液压油缸调节装置与地面的平行高度,使位于前端的拔取螺旋杆能浮于地表,又与甘蓝底部有效接触。工作时,驱动轮与地轮共轴,地轮转动产生的动力通过传动系统使装置各部件运行;输入动力经由轴和链条传动带动拔取部件和提升输送部件旋转实现甘蓝的拔取收获,其中拔取螺旋杆的动力来源是齿轮箱通过万向节间接传递。随着机具向前行进,脱离土壤的甘蓝在橡胶带和拔取螺旋杆作用下,进入提升输送部件中。此后,甘蓝球体顶部和底部会受到压顶输送带和提升螺旋杆持续的挤压力和支持力,使甘蓝沿着压顶输送带和螺旋杆向上输送,到达导流槽后被抛出装置,完成提升输送收获。
2 甘蓝在拔取输送装置中的受力分析
2.1 甘蓝进入提升输送部件的受力分析
甘蓝在运动到拔取螺旋杆末端时,不能被压入提升输送部件内的现象时有发生,会导致甘蓝被卡在提升输送部件的入口处,堵塞提升输送部件。为便于分析甘蓝进入时的受力状态,以进入提升输送部件入口处的甘蓝为例,如图2所示。
在水平拔取螺旋杆上的甘蓝由于受机具的前进和拔取螺旋杆的推力作用沿杆横向运动,且甘蓝顶部逐渐与橡胶带开始接触,并在到达水平拐点时,橡胶带弹性变形最显著。
在进入过程中,甘蓝会受到螺旋杆产生推力F、支持力N、橡胶带挤压力Fk以及螺旋杆对甘蓝的摩擦阻力Ff等作用力的影响。在不考虑甘蓝质点质心位置情况下,简化刚体受力系统得到甘蓝在输送过程中的受力平衡方程
∑X=0,Fcosγ+Fksinψ-Ff=0
∑Y=0,N+Fsinγ-G-Fkcosψ=0(1)
式中: G——甘蓝自身重力,N;
γ——螺旋凸棱的螺旋升角,(°);
ψ——提升螺旋杆与地面的倾角,(°)。
甘蓝沿着提升螺旋杆运动的条件为∑X>0,则
Fcosγ>Ff-Fksinψ
Ff=μ(G+Fkcosψ)(2)
式中: μ——甘蓝与螺旋杆间的摩擦系数。
ψ>arcsinFkμ(N+Fsinγ)-Fcosγ(3)
2.2 甘蓝在提升输送部件中平稳输送受力分析
在甘蓝被平稳输送时,甘蓝受到提升螺旋杆N′的支持力和橡胶带Fk挤压力的方向都垂直于提升螺旋杆,甘蓝自身重力方向与提升螺旋杆呈一定角度,如图3所示。
∑X=Fcosγ-Gsinψ-Ff=0
∑Y=N′+Fsinγ-Fk-Gcosψ=0(4)
甘蓝平稳输送条件为∑X≥0,则
Fcosγ≥Gsinψ+Ff
Ff=μ(Fk+Gcosψ)(5)
ψ≤arcsinGFcosγ-μ(Fsinγ+N′)(6)
综上,ψ∈arcsinFkμ(N+Fsinγ)-Fcosγ,arcsinGFcosγ+μ(Fsinγ+N′)。
通过图2可知,在实际的提升输送部件中,Fk受橡胶带的弹性形变位移dp影响,通过调节限位轮位置使压顶输送带与提升螺旋杆间的距离变化为Δx,相应的dp的形变位移量也会变化Δh,所以Fk的大小应受限位轮位置约束。结合受力分析,在整个提升输送阶段,当螺旋杆推力F和甘蓝球纵径一定时,适度调节限位轮位置,会使挤压力Fk增大,便于甘蓝球快速进入提升输送部件,但过大的挤压力不仅会对甘蓝球造成挤压损伤,同时随着挤压力增加也会导致倾角增大。过大的倾角会造成甘蓝球在平稳输送过程中存在沿提升螺旋杆向下滑落的现象,从而使甘蓝球脱离出部件或者堵塞在入口处。参照文献[6, 14]与农业机械设计手册螺旋输送器倾斜输送系数表,提升螺旋杆的倾角ψ设置为17°适宜。
3 仿真分析
3.1 建立仿真模型
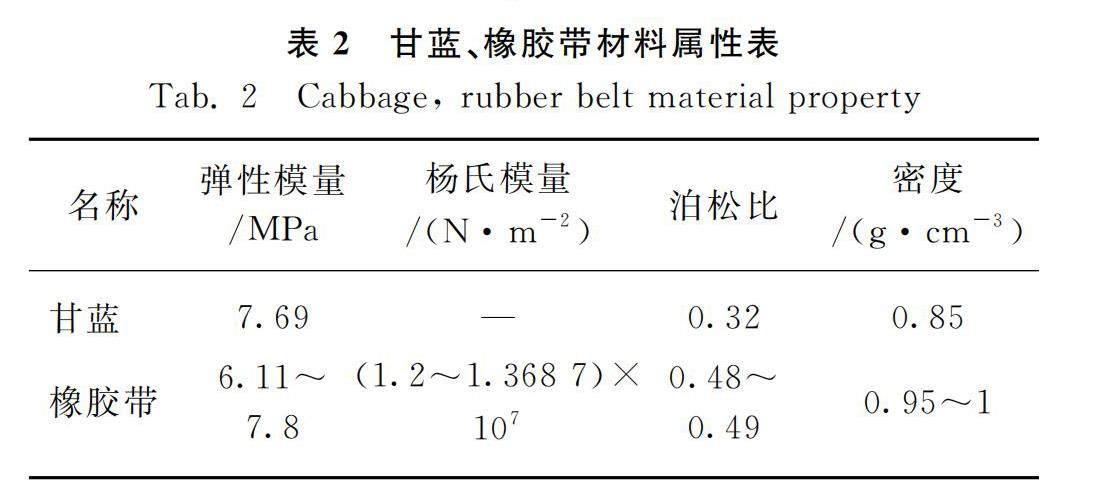
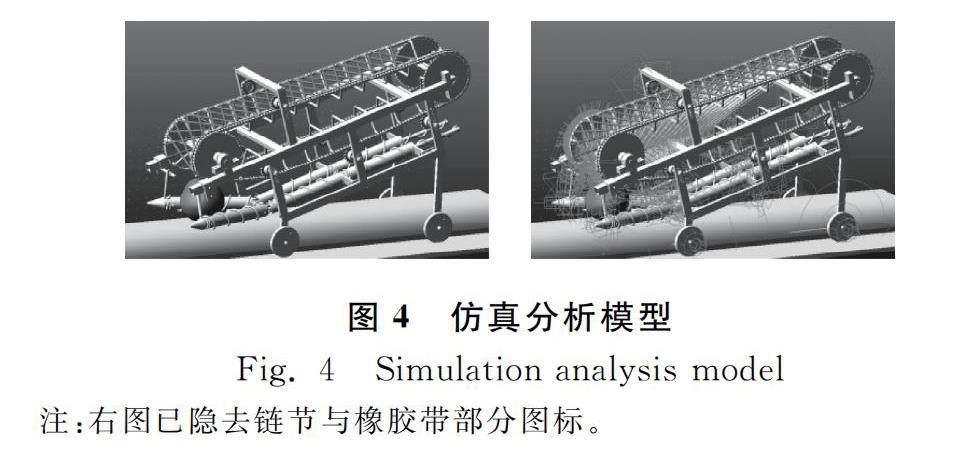
为了模拟收获装置在田间拔取收获甘蓝的动力学状况,依据前文对收获装置关键部件设计分析得出的参数,使用SolidWorks软件对收获装置和甘蓝植株进行了建模,并保存为“.x_t”格式导入Adams中。在保证仿真可执行性和精确性的条件下,对仿真模型进行简化:(1)由于本装置工作方式为悬挂式,在进行仿真试验时,为便于调节机具前进速度,对原始模型添加了四个轮子。(2)删除导流槽、齿轮箱和驱动轮等零件,改为直接在螺旋杆和压顶输送带主动轮上添加运动副。(3)橡胶带受力会发生变形,通过Adams中的离散柔性连杆工具将橡胶带建立成柔性体。通过查阅资料[7, 15, 16],确定甘蓝模型材料属性和橡胶带材料属性如表2所示。
将仿真模型简化后,对模型添加零部件约束及驱动设置进行运动学仿真分析,仿真时间设置3s,步长300,仿真模型添加结果如图4所示。
3.2 试验结果与分析
根据对关键部件设计的结论,以机具前进速度、螺旋杆转速、螺旋凸棱外径和限位间距(限位轮与提升螺旋杆之间距离)作为仿真试验因素,各因素选取3个水平(表3);选取甘蓝模型与螺旋凸棱的接触力(y1)和在提升输送部件中的甘蓝球部垂直度(y2)作为评价指标。其中y1为螺旋凸棱受来自甘蓝模型的重力、摩擦力、赫兹接触力和橡胶带对甘蓝模型挤压力的总和力;y2是为机械化收获中切根工序做准备的,垂直度越高,甘蓝植株在切根时切割损伤越小;反之亦然。
通过正交试验设计表(表4),按照试验号中因素水平,将测试模型导入Adams中获取指标数值。A、B、C、D为各因素编码值。
利用极差分析法来评价4个因素分别对接触力与垂直度的影响程度,通过极差值R确定4个因素分别对两指标影响的主次关系。极差分析表如表5所示。
从表5可看出,4个试验因素中螺旋杆转速B和螺旋凸棱外径C对接触力的影响最大,其次是机具前进速度A,再次是限位间距D。各因素极差值R1分别为:65.09N、75.10N、71.96N、58.23N。对接触力影响关系为:螺旋杆转速B>螺旋凸棱外径C>机具前进速度A>限位间距D。以接触力为指标时,其数值越小表示甘蓝在拔取输送过程中受到的挤压损伤越小,故K值越小对应的水平最佳,即对接触力的最优组合为A1B3C3D1;4个试验因素中限位间距D和螺旋杆转速B对垂直度的影响最大,其次是螺旋凸棱外径C和机具前进速度A对垂直度影响较小。各因素极差值R2分别为:6.3%、19.8%、15.5%、20.4%。对垂直度影响关系为:限位间距D>螺旋杆转速B>螺旋凸棱外径C>机具前进速度A。以垂直度为指标时,K值越大对应的水平最佳,即对垂直度的最优组合为A2B2C2D2。机械化收获甘蓝的过程中,甘蓝受到挤压损伤是不可避免的,主要表现为甘蓝最外层叶片破损。但甘蓝的切割损伤则会伤害到甘蓝球体内部,严重影响收获质量,因此,9次试验中对接触力和垂直度的影响最符合实际的组合为A2B2C2D2。
将A2B2C2D2组合的试验模型在Adams中进行仿真分析,以甘蓝模型质心“.cm”marker点为标记点,绘制甘蓝模型在收获中的运动轨迹曲线,如图5所示。通过后处理观察,甘蓝根部始终与提升螺旋杆垂直,且甘蓝在提升输送部件平稳输送状态符合理论分析。
4 田间试验
2022年10月19日,在哈尔滨呼兰区小果家窝堡进行田间试验,试验地长约100m,宽约10m。选择的甘蓝品种为中甘21甘蓝,采用单垄种植,行距670mm,株距300~400mm,株高245~270mm,甘蓝球横、纵径为160~220mm和170~195mm,甘蓝成熟度较好,符合收获要求。
依据GB/Z 26582—2011《结球甘蓝生产技术规范》和NY/T 4073—2022《结球甘蓝机械化生产技术规程》,选取采净率和破损率为甘蓝收获装置的评价指标。在试验地机具以1.5km/h的作业速度对单垄上的甘蓝连续采收,记录采收后甘蓝切割破损颗数和甘蓝球颗数。
田间试验结果表明,拔取输送装置收获甘蓝的平均采净率为97.6%,破损率为8.24%。样机收获作业流畅,能够一次性完成甘蓝拔取、切根和输送等收获任务,装置拔取效果良好,垂直度较高,田间收获效果和性能指标基本符合机械化生产规范要求(NY/T 4073—2022,采净率≥95%,破损率≤5%)。
5 结论
1) 本文研究一种甘蓝拔取输送装置,介绍其结构组成、工作原理和技术参数,对甘蓝在装置内运动状态进行受力分析。
2) 建立甘蓝拔取输送装置与甘蓝植株模型,借助Adams仿真软件对装置收获甘蓝的过程进行多体动力学仿真分析和试验验证,以机具前进速度、螺旋杆转速、螺旋凸棱外径和限位间距作为试验因素,以接触力和垂直度作为指标,进行四因素三水平正交试验,通过试验结果可知,当拔取输送装置的工作参数为:机具前进速度0.4 m/s,螺旋杆转速300 r/min,螺旋凸棱外径70 mm,限位间距166 mm时,收获甘蓝的垂直度最高,该组合为拔取输送装置的最佳参数组合。
3) 该样机整体结构合理,能够达到甘蓝机收的预期目标和部分性能指标。后续研究可根据分析甘蓝球切割损伤部位和球横、纵径,进一步对样机结构进行优化试验,以提高收获的自适应性和低损伤性,为后续甘蓝机收装备设计与优化提供参考。
参 考 文 献
[1]Fukao T. Field robotics: Applications and fundamentals [J]. Journal of Robotics and Mechatronics, 2021, 33(6): 1216-1222.
[2]Park Y, Kim H J, Son H I. Novel attitude control of korean cabbage harvester using backstepping control [J]. Precision Agriculture, 2022: 1-20.
[3]Park Y, Son H I. A sensor fusion-based cutting device attitude control to improve the accuracy of korean cabbage harvesting [J]. Journal of the ASABE, 2022, 65(6): 1387-1396.
[4]Alatyrev S S, Mishin P V, Alatyrev A S. New cabbage harvester [J]. Vestnik of Kazan State Agrarian University, 2018(1): 102-107.
[5]王志强, 郭维俊, 王芬娥, 等. 4YB-Ⅰ型甘蓝收获机的总体设计[J]. 甘肃农业大学学报, 2011, 46(3): 126-130.
Wang Zhiqiang, Guo Weijun, Wang Fene, et al. Overall design of 4YB-Ⅰcabbage harvester [J]. Journal of Gansu Agricultural University, 2011, 46(3): 126-130.
[6]周成. 甘蓝收获关键技术及装备研究[D]. 哈尔滨: 东北农业大学, 2013.
Zhou Cheng. Study on the cabbage key harvesting technology and harvester [D]. Harbin: Northeast Agricultural University, 2013.
[7]杜冬冬. 履带自走式甘蓝收获机研究及称重系统开发[D]. 杭州: 浙江大学, 2017.
Du Dongdong. Research on crawler self-propelled cabbage harvesting equipment and development of its weighing system [D]. Hangzhou: Zhejiang University, 2017.
[8]曹立文, 赵统森. 白菜收获机设计[J]. 黑龙江大学工程学报, 2019, 10(4): 85-89, 96.
Cao Liwen, Zhao Tongsen. Design of chinese cabbage harvester [J]. Journal of Heilongjiang Hydraulic Engineering College, 2019, 10(4): 85-89, 96.
[9]果蔬茶类收获机械创新团队成功研发2款甘蓝收获机[J]. 蔬菜, 2018(8): 57.
The fruit, vegetable and tea harvesting machinery innovation team successfully developed 2 cabbage harvesters [J]. Vegetables, 2018(8): 57.
[10]Zhang J, Cao G, Jin Y, et al. Parameter optimization and testing of a self-propelled combine cabbage harvester [J]. Agriculture, 2022, 12(10): 1610.
[11]Zhou C, Luan F, Fang X, et al. Design of cabbage pulling-out test bed and parameter optimization test [J]. Chemical Engineering Transactions, 2017, 62: 1267-1272.
[12]杨光, 肖宏儒, 张健飞, 等. 甘蓝双圆盘切根装置设计与试验[J]. 中国农机化学报, 2020, 41(10): 83-88.
Yang Guang, Xiao Hongru, Zhang Jianfei, et al. Design and experiment of double disc root cutting device of cabbage [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(10): 83-88.
[13]原田一郎. 加工·業務用ハクサイ刈取りアタッチメントの開発[J]. 農業食料工学会誌, 2017, 79(2): 105-107.
[14]郑欣欣. 倾斜式螺旋输送机输送性能及螺旋体有限元仿真研究[D]. 哈尔滨: 哈尔滨理工大学, 2020.
Zheng Xinxin. Research on the conveying performance of inclined screw conveyor and finite element analysis of screw body [D]. Harbin: Harbin University of Science and Technology, 2020.
[15]杨恒潇. 天然橡胶本构模型与轮胎成型仿真研究[D]. 郑州: 郑州大学, 2021.
Yang Hengxiao Research on natural rubber constitutive model and tire forming simulation [D]. Zhengzhou: Zhengzhou University, 2021.
[16]崔功佩. 采后甘蓝自动精准整修装备及关键技术研究[D]. 咸阳: 西北农林科技大学, 2021.
Cui Gongpei. Equipment and key technologies of automatic and precision trimming for postharvest cabbage [D]. Xianyang: Northwest Agriculture and Forestry University, 2021.
DOI: 10.13733/j.jcam.issn.2095-5553.2024.06.007
付晓, 徐锐良, 闫祥海, 等. 力位综合系数调节方法研究[J]. 中国农机化学报, 2024, 45(6): 37-41
Fu Xiao, Xu Ruiliang, Yan Xianghai, et al. Study on adjustment method of force-position comprehensive coefficient [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(6): 37-41
猜你喜欢
天天爱科学(2022年12期)2022-11-10 08:33:44
动漫界·幼教365(中班)(2020年8期)2020-06-29 07:28:25
中国科技博览(2016年25期)2016-12-20 19:50:49
汽车科技(2016年6期)2016-12-19 20:32:56
东方教育(2016年3期)2016-12-14 13:03:34
湖北农业科学(2016年18期)2016-12-08 18:51:32
长江蔬菜(2016年10期)2016-12-01 03:05:34
中国民族民间医药·上半月(2016年10期)2016-11-19 11:34:28
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年20期)2016-09-29 11:36:29