基于双路控制的农田精准喷药处方优化试验
2024-06-17 19:10:06赵浣旻李亚芹李志博刘兆光蒲岩岩邱新伟
中国农机化学报 2024年6期
赵浣旻 李亚芹 李志博 刘兆光 蒲岩岩 邱新伟
摘要:自精准农业技术开展以来,精准喷药作为精准农业关键技术之一,是一直以来研究的重要问题。为进一步研究精准喷药,提出基于双路控制的分区宽度变量喷药方法,并搭建农药精准喷洒试验台,对比例电磁阀控制下喷头的有效喷幅进行测量试验。试验发现,在PWM占空比大于60%时有效喷幅与理论值喷幅误差小于20%,具有可参考性。试验时,根据有效喷幅对喷药处方图的分区宽度进行选择,以0.5 m、0.75 m、1 m作为试验参数。根据选择的参数设计以喷雾高度、移动速度、分区宽度为因素的正交试验,得到回归方程,并通过残差分析检验模型的正确性。试验得到参数优化区域为:喷雾高度1.5 m、行进速度0~0.5 m/s、分区宽度0.7~0.9 m。田间试验发现,采取优化的分区宽度进行喷药比常规喷药方式节省23%的药量,同时有效覆盖率可达90.7%。
关键词:精准喷药;双路控制;优化试验;处方图
中图分类号:S2
文献标识码:A
文章编号:2095-5553 (2024) 06-0113-06
收稿日期:2022年12月5日
修回日期:2023年4月14日
*基金项目:黑龙江省教育厅基本科研业务费基础研究项目(2020—KYYWF—0264)
第一作者:赵浣旻,男,1996年生,天津人,硕士研究生;研究方向为智能农业装备。E-mail: 3031402865@qq.com
通讯作者:李亚芹,女,1978年生,黑龙江佳木斯人,博士,教授;研究方向为智能农业装备。E-mail: 104006239@qq.com
Experimental on optimization of field precision spray prescription based on dual-way control
Zhao Huanmin1, Li Yaqin1, Li Zhibo2, Liu Zhaoguang1, Pu Yanyan1, Qiu Xinwei1
(1. Jiamusi University, Jiamusi, 154007, China; 2. Heilongjiang Provincial Research Institute of Agricultural Mechanical Engineering, Harbin, 150081, China)
Abstract: Since the development of precision agriculture technology, precision spraying, as one of the key technologies of precision agriculture, has been an important issue studied. In order to further study precision spraying, the partition width variable spraying method based on double way control was proposed, and the pesticide precision spraying test bench was set up to measure and test the effective nozzle under the proportional solenoid valve control. The test found that the error between the effective spray amplitude and theoretical value was less than 20%, when the PWM duty ratio was greater than 60%, which had reference value. During the test, the partition width of the spray prescription map was selected according to the effective spray amplitude, and 0.5m,0.75m and 1m were used as the test parameters. Orthogonal tests with spray height, travel speed, and partition width were designed from the selected parameters, and regression equations were obtained, and the correctness of the model was tested by residual analysis. The spray height was 1.5m, travel speed 0-0.5m/s and partition width 0.7-0.9m. Field experiments showed that spraying with optimized zone width saved 23% of the dosage compared with conventional spraying, while the effective coverage could reach 90.7%.
Keywords: precision spraying; dual-route control; optimization test; prescription diagram
0 引言
在农田喷药的过程中,精准喷药一直是人们研究的主要问题。传统的喷药方式占用大量的人力物力,同时还会导致农药污染环境[1]。随着科技的进步,无人机喷药出现并逐步应用于大田喷药的场景中。与传统机器相比,无人机具有成本低、效率高、机动性强等优点[2],可以将劳动力成本降低一半[3, 4]。与其他喷药方式相比,无人机在面对障碍物时具有更好的操作性[5]。无人机能提供高效、广泛、便捷的作业,为快速高效杀灭病虫害提供了更好的平台[6]。但无人机喷药也存在一定的问题,无人机进行作业时往往使用等量喷药的方式,大部分参数都由无人机自有的参数决定,不能做到按需处理,对病虫害的预防效率大大降低[7]。大雾量、雨淋式的喷药方式,已远不能适应现代农业和新农村建设的要求[8]。
闫春雨等[9]通过对图像进行二值化、栅格化、重采样等处理后,将图像中的作物信息转换成喷药量,最终生成喷药处方图。尹东富等[10]利用机器视觉技术获得杂草质心坐标及面积大小,经软件处理后生成除草剂喷施处方图。彭孝东等[11]提出了基于幅宽微变的航线归整法路径规划方案。现阶段对无人机喷药的研究多为作业方法和路径规划,但对于能够用于植保无人机精准作业的农田处方图却鲜有研究[12],导致无人机作业过程中多为定值药量进行喷洒或根据无人机搭载喷头的喷洒宽度进行简单的区域划分。以上两种对目标地块的划分方式在喷药过程中没有做到精准,在面对农田复杂的药量需求时,会造成药量不足和药量过多两种情况出现。本研究对现有的农田划分方式进行改进,提出基于双路控制的精细划分方式,对农田以更小区域单元进行作业。以无人机作业最小喷幅即单个喷头的喷幅为基础对目标地块进行区域划分,通过双路控制实现对农田的精准喷药。
1 变量喷药控制试验台
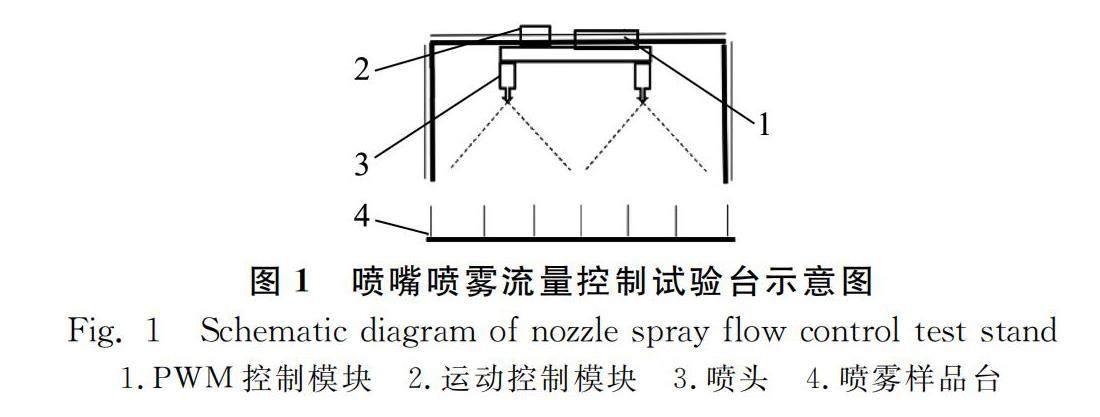
图1为变量喷药控制试验台。试验台供液系统由液体容器、水泵、流体输送管、流量计组成。运动系统由步进电机、电机驱动器、调速器组成。试验时采用立方形量杯、杯架、水敏纸和试纸夹组成的喷雾样品台,对雾滴的分布进行测量。由PWM电磁比例调节电磁阀及其驱动电路组成的喷雾变量控制模块。由ATmega328为核心的电机驱动模块,使用传动带和滑轮等组成传动系统控制试验台移动,模拟无人机在喷药过程中的动作、轨迹。
1.1 电磁阀比例调节阀
选用德国生产的电磁比例调节阀6023型。这是一种直接作用、双向、常闭电磁阀,具体参数如表1所示。当断电时,电磁比例阀会关闭。在供电时,根据控制电路输出的PWM电信号的不同占空比对阀门开度进行连续调节和控制。为将喷嘴尖端与阀门紧密连接,采用一侧为3/8NPT外螺纹、另一侧为M18×1.5外螺纹的接头。使阀门直接连接到喷嘴上,减小喷药过程的误差。
1.2 PWM信号控制电路
PWM指令信号经比例放大器进行功率放大,并按比例输出电流给比例阀的比例电磁铁,比例电磁铁输出力并按比例移动阀芯的位置,即可按比例控制液流的流量[13, 14]。采用AT89C52单片机作为控制模块输出PWM信号,使用定时器T0控制频率,定时器T1控制占空比。通过P1.1和P1.2两个引脚接入控制信息,进而控制占空比的增减。因为在AT89C52中没有专门输出PWM信号的引脚,因而使用任意输出引脚作为PWM信号的输出引脚,这里选择P2.2作为输出引脚。PWM控制电路如图2所示。当按下开关K1时,占空比增加;当按下开关K2时,占空比减少。占空比控制调整的变化量由程序进行控制,在试验过程中设定为5%。通过调节占空比控制电磁比例阀的开度,调节喷雾量。
1.3 电机驱动电路
通过A4988微驱动器驱动步进电机。在VMOT、GND引脚之间连接8~35 V电压,同时并联100μF的去耦电容器在瞬时电压下保护驱动板。1A、1B、2A、2B引脚连接步进电机的两组线圈。将STEP与DIR引脚与ATmega328的P3、P4引脚相连,用于控制步进电机的转速与方向。
2 试验条件与方法
2.1 试验条件
电磁比例阀的驱动信号是占空比可在10%~100%之间连续可调的方波信号。通过对占空比的调节,可以得到不同的喷雾条件。由3个步进电机控制喷头在平面内移动。通过旋钮对步进电机的方向、转速进行控制,可以模拟不同路径的无人机行进条件。喷头工作压力为0.3 MPa。
2.2 试验方法
由步进电机控制喷头所在平台的移动速度用于模拟无人机在作业过程中的移动,通过平台的升降控制喷头高度用于模拟无人机在作业过程中与作物之间的高度变化,通过PWM信号占空比的变化,控制喷药量以及喷雾角度。
使用方形量杯与水敏纸进行药量信息采集。至少一个量杯被装满时,记录每个量杯中的量,每次测试重复三次,取平均值。使用水敏纸进行液滴覆盖范围数据采集,通过对水敏纸上的液滴占比计算,当占比小于50%时视为喷药有效覆盖面的边缘。试验过程中通过控制行进速度、喷头高度和PWM信号占空比得到喷雾量和覆盖范围数据。其中行进速度分为三档,喷雾高度分为三档,PWM信号占空比自50%~90%分为五档。
3 试验过程与结果
3.1 PWM占空比优化试验
在试验过程中对喷头的高度变量控制,设置1.2 m、1.4 m、1.6 m三种高度。通过重复试验,对在不同占空比的PWM波控制下的喷药宽度进行测量。试验结果如表2所示。
通过Design-Expert软件对数据进行分析,结果如表3所示。在信度为0.05下采用F检验,喷雾高度和PWM占空比对有效喷幅影响显著。对数据进行拟合得到曲面方程式(1)。拟合曲面如图3所示。
Z=-0.48+0.04A-1.49D-4.04A2+0.02AD+0.25D2(1)
式中: A——喷雾高度,m;
D——PWM信号占空比,%。
以喷头的理论喷幅为基础进行预测,实际喷幅的预期值在1 m左右。曲面在PWM占空比在50%~65%时,倾斜角度较大,实际喷幅的变化较大。在占空比为50%时,实际覆盖宽度仅为0.5 m,但在占空比为60%时实际覆盖宽度达到0.8 m,目标喷幅的误差小于20%,可以满足设计的最低要求。在占空比为65%~90%时,实际覆盖宽度的变化较小,且满足设计要求。根据实际情况下喷药覆盖率的要求,并结合拟合曲面发现,当喷雾高度为1.4m、1.6m,PWM信号占空比大于60%时,有效喷幅较好。
3.2 分区宽度优化试验
通过ArcMap软件生成随机的地块信息用于进行覆盖效果试验,如图4所示。
采用了不同的分区宽度进行试验,同时对喷头的高度和移动速度进行控制。在试验台下方根据分区信息放置水敏纸,通过对水敏纸上的液滴分布情况计算雾滴的覆盖率。通过流量计对区域内药量进行统计。根据变量设计了三因素旋转正交试验,A为喷雾高度因素、B为移动速度因素、C为分区宽度。在该模拟地块进行三次试验,取均值作为最终结果,具体数据如表4所示。
通常这类试验以喷雾流量或雾滴沉积密度作为指标,但该方法忽略了对目标的有效覆盖面积。通过参考医学上不同种类动物之间药物剂量转换因子的计算方式[15],试验中设计了喷药量与覆盖面积的比值作为试验指标。试验发现,当两者的比值在4~6时,喷药效果较好。使用Design-Expert软件数据进行分析,结果如表5所示。
以地块一的试验结果为例,对回归方程中各项回归系数在信度0.05下采用F检验,将不显著项去除。发现交互作用AB、AC对指标影响不显著,剔除后得到覆盖率简化回归方程式(2)。
R=3.046+0.631A-1.745B+1.332C-0.767BC+0.693A2+0.460C2+0.471B2(2)
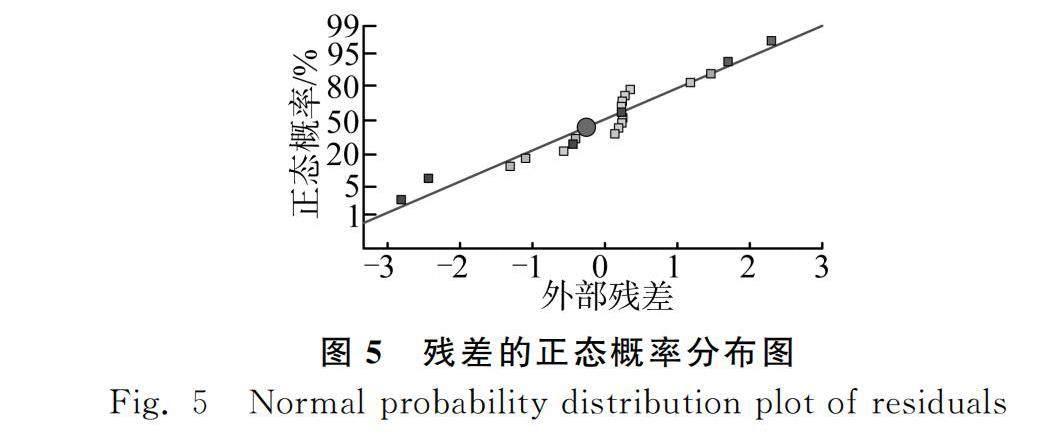
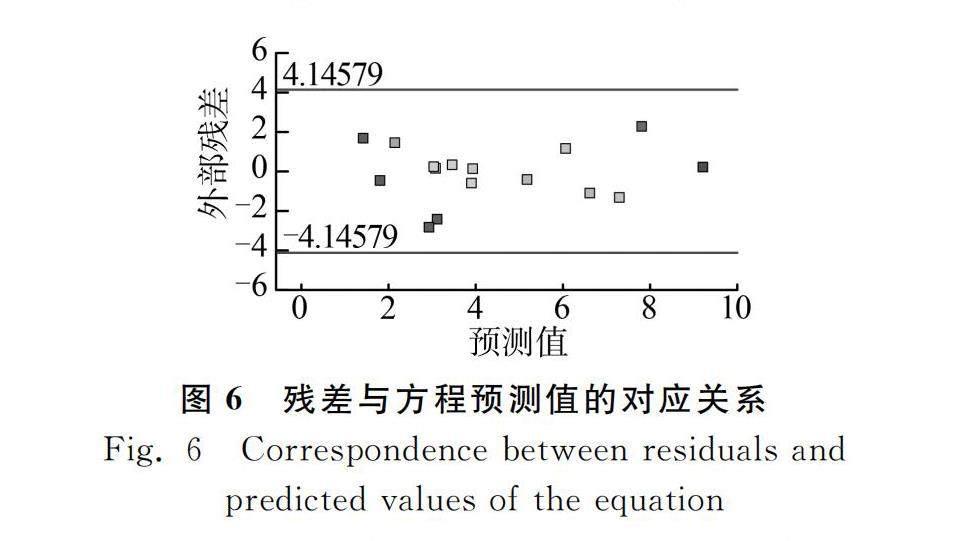
图5为残差的正态概率分布图,可以看出,残差值靠近直线,说明回归模型拟合较好;图6为残差与方程预测值的对应关系,可以看出,分布特征不随预测值的增加而发生改变,说明着数据方差齐性、独立性条件符合。
通过回归方程可得到响应曲面如图7所示。
由图7(a)可知,在喷雾高度不变时,随着移动速度的增加,喷药量与覆盖面积的比值呈现下降趋势;在移动速度一定时,喷药量与覆盖面积的比值随着喷雾高度呈现先下降后上升的趋势。由图7(b)可知,在喷雾高度不变时,喷药量与覆盖面积的比值随着分区宽度的增加呈现增加趋势;在分区宽度不变时,喷药量与覆盖面积的比值随着高度增加呈现先下降后上升的趋势。由图7(c)可知,在移动速度不变时,喷药量与覆盖面积的比值随着分区宽度增加呈现上升的趋势;在分区宽度不变时,喷药量与覆盖面积的比值随着移动速度增加呈现上升趋势。以各因素水平区间为约束条件,对参数进行优化。参数优化的最优结果为:喷雾高度1.5 m、移动速度0.4~0.5 m/s、分区宽度0.75~0.9 m。
4 田间试验
2022年6月23—30日在桦川县江川农场15队17号地,进行了精准划分变量喷药试验,目标地块如图9所示。试验时设定喷雾高度1.5 m、移动速度0.5 m/s、分区宽度0.9 m。对目标农田进行区域划分,以1 m×1 m区域为一个操作单元,共划分24个单元。
对24个单元进行添加处方值,并通过Loaspace Viewer软件进行定位获取目标农田地理位置信息,将经度和纬度输入Microsoft Excel中[16]。最终将地块区域的地图、坐标信息和处方值导入ArcMap软件中生成处方图,如图9所示。处方图主要包含三层信息,第一层是栅格信息,根据无人机的有效喷雾幅度和飞行速度而大小相等的矩形栅格;第二层是处方值信息层,根据专家决策获得的网格剂量;第三级是地理信息层,主要是栅格行、列的经纬度信息。根据处方图进行喷药试验,通过流量计采集药量信息,通过水敏纸采集药液的覆盖率信息。使用选择的参数进行喷药试验,通过Design-Expert软件预测值为6.37 mL/m2、预计喷药量为133 mL、预计覆盖率为87.25%。试验实际值为5.65 mL/m2、实际喷药量为123 mL、实际覆盖率为90.7%。通过对实验室环境与实地作业环境对比分析发现,室内试验并不能完全模拟在实际作业过程中的作业环境。室内试验时并没有考虑作物的叶片遮挡和环境中的横向风等影响因素,导致预测值与实际值存在误差。预测值与实际值之间的误差为12.7%,验证试验结果在优化性能指标区间,表明优化结果是可信的。
使用常规喷药方式[17-19]再进行喷药试验,得到喷药量为160 mL、覆盖率为90.7%、喷药量与覆盖面积的比值为7.35 mL/m2。优化参数喷药试验对比常规喷药参数试验结果相差30%,通过分析发现优化喷药方式的喷药量与常规喷药方式覆盖率相同,但节省了23%的喷药量。
5 结论
为更精准喷药,提出基于双路控制的农田精准喷药区域划分方法,并进行以喷雾高度、移动速度和分区宽度为三因素、以农田喷药量和覆盖率为目标的正交试验。同时进行优化区域的农田田间试验,试验时采用双路控制的精准喷药方法,并将该方法与常规喷药方法进行对比。
1) 在PWM信号占空比小于50%时,喷头的喷雾实际覆盖宽度与理论宽度误差大于38%,实际喷药量与理论值误差大于27%,无法满足喷药需求。因而,使用PWM对电磁比例阀进行控制时,应选择占空比大于60%的PWM波。
2) 以喷雾高度、移动速度与分区宽度为影响因素,实施双路控制的精准喷药试验。试验结果表明,各因素对喷药效果影响主次顺序为行进速度、分区宽度、喷雾高度。最优的工作参数组合为:喷雾高度1.5 m、移动速度0.4~0.5 m/s、分区宽度0.75~0.9 m。通过回归方程得到的预测值与实际值相差12.7%,验证数学模型的可用性。
3) 进行优化区域参数的双路控制精准喷药田间试验。试验发现,采用优化的分区方式喷药比常规喷药方式可节省23%的药量。采用优化的参数进行分区喷药不仅减少单位喷药量,同时喷药精准度明显提升,在降低生产成本的同时也减少对农田及周边土壤的污染,对精准喷药具有一定的指导意义,促进农业可持续发展。
参 考 文 献
[1]陈佶, 刘伟华, 袁益明. 无人机雾化喷头的使用现状与发展趋势[J]. 中国植保导刊, 2018, 38(3): 66-70.
Chen Ji, Liu Weihua, Yuan Yiming. Application and development trend of nozzles on UAV [J]. China Plant Protection, 2018, 38(3): 66-70.
[2]Huang Y, Hoffmann W C, Lan Y, et al. Development of a spray system for an unmanned aerial vehicle platform [J]. Applied Engineering in Agriculture, 2009, 25(6): 803-809.
[3]Umeda S, Yoshikawa N, Seo Y. Cost and workload assessment of agricultural drone sprayer: A case study of rice production in Japan [J]. Sustainability, 2022, 14(17): 10850.
[4]Seo Y, Umeda S. Evaluating farm management performance by the choice of pest-control sprayers in rice farming in Japan [J]. Sustainability, 2021, 13(5): 2618.
[5]Hassanein M, El-Sheimy N. An efficient weed detection procedure using low-cost UAV imagery system for precision agriculture applications [J]. International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, 2018.
[6]华小梅, 江希流. 我国农药环境污染与危害的特点及控制对策[J]. 环境科学研究, 2000(3): 40-43.
Hua Xiaomei, Jiang Xiliu. Characteristics and control countermeasures of pesticide pollution and its damage on environment in China [J]. Research of Environmental Sciences, 2000(3): 40-43.
[7]李会芳, 邱白晶, 刘保玲, 等. 对精确农业中变量喷雾控制的研究[J]. 中国农机化学报, 2004(3): 25-27.
Li Huifang, Qiu Baijing, Liu Baoling, et al. Study on the control of variable-rate spraying in precision agriculture [J]. Journal of Chinese Agricultural Mechanization, 2004(3): 25-27.
[8]龚艳. 高效植保机械化技术发展方向探讨[J]. 农机科技推广, 2008(11): 34-35.
[9]闫春雨, 黎文华, 兰玉彬, 等. 基于无人机多光谱遥感的棉花脱叶效果监测及处方图生成研究[J]. 南京农业大学学报, 2022, 45(4): 799-808.
Yan Chunyu, Li Wenhua, Lan Yubin, et al. Study on cotton defoliation effect monitoring and formulation map generation based on multi-spectral remote sensing of UAV [J]. Journal of Nanjing Agricultural University, 2022, 45(4): 799-808.
[10]尹东富, 陈树人, 裴文超, 等. 基于处方图的室内变量喷药除草系统设计[J]. 农业工程学报, 2011, 27(4):131-135.
Yin Dongfu, Chen Shuren, Pei Wenchao, et al. Design of map-based indoor variable weed spraying system [J]. Transactions of the Chinese Society for Agricultural Engineering, 2011, 27(4): 131-135.
[11]彭孝东, 兰玉彬, 胡洁, 等. 农用小型无人机转弯掉头模式及全区域覆盖下作业路径规划与优化[J]. 华南农业大学学报, 2019, 40(2): 111-117.
Peng Xiaodong, Lan Yubin, Hu Jie, et al. Turning mode and whole region-coverage path planning and optimization of agricultural small UAV [J]. Journal of South China Agricultural University, 2019, 40(2): 111-117.
[12]阚平. 基于路径规划的多植保无人机协同精准作业方法研究[D]. 济南: 山东大学, 2021.
Kan Ping. Cooperative and precise operation method of multi-sprayer-UAVs based on path planning [D]. Jinan: Shandong University, 2021.
[13]Wei D, Xiongkui H, Weimin D. Droplet size and spray pattern characteristics of PWM-based continuously variable spray [J]. International Journal of Agricultural and Biological Engineering, 2009, 2(1): 8-18.
[14]雷慧杰, 卢春华, 李正斌. 电力电子应用技术[M]. 重庆: 重庆大学出版社, 2017.
[15]徐贞, 史美祺. 抗肿瘤药物的剂量选择[J]. 中国临床药理学杂志, 2012, 28(5): 379-380.
[16]Wen S, Zhang Q, Deng J, et al. Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control [J]. Applied Sciences, 2018, 8(12): 2482.
[17]胡章涛. 药液量和飞防助剂对低空低(超低)容量喷雾施药效果的影响[D]. 合肥: 安徽农业大学, 2020.
Hu Zhangtao. The effect of pesticide liquid volume and aircraft control additives on low-altitude low(Ultra-low) volume spray application [D]. Hefei: Anhui Agricultural University, 2020.
[18]张宋超, 薛新宇, 孙涛, 等. 植保无人飞机油菜杂草防治与效果评估研究[J]. 中国农机化学报, 2019, 40(9): 48-53, 59.
Zhang Songchao, Xue Xinyu, Sun Tao, et al. Study on weed control of plant protection UAV and effect evaluation in rape filed [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(9): 48-53, 59.
[19]金永奎, 薛新宇, 秦维彩, 等. 电动单旋翼植保无人机性能试验[J]. 中国农机化学报, 2019, 40(3): 56-61.
Jin Yongkui, Xue Xinyu, Qin Weicai, et al. Performance test of electric powered single-rotor UAV for plant protection [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 56-61.