农药喷雾系统建模与仿真技术研究综述
2024-06-16 12:20郑加强张慧春徐幼林周宏平
中国农业科技导报 2024年3期
关键词:发展建议
郑加强 张慧春 徐幼林 周宏平
摘要:农药使用效果与农药喷雾过程密切相关,农药喷雾过程的建模与仿真可弥补因植物生长周期差异、病虫害发生程度不同以及田间作业自然环境不可控等造成的试验研究困难。分析农药施用的抗性、再增猖獗、残留(resistance,resurgence,residue,3R)/效果、效率、生态(efficacy,efficiency,eco-environment,3E)/方法、模型、测试(method,model,measurement,3M),重点综述农药喷雾过程的雾化、输运、沉积等关键环节的模拟仿真研究状况。根据模拟仿真技术发展趋势,提出农药喷雾半实物仿真系统设计的建议,并提出雾化模型及新型喷头雾化机理、群体农药雾滴多相流场模拟、靶标定制与识别模型、综合农药雾滴飘移模型、植物生长模型与农药喷雾系统耦合等建议,以促进原创农药精确喷雾技术研究和高质量植保机械研发。
关键词:植保机械;农药喷雾系统;建模仿真;发展建议
doi:10.13304/j.nykjdb.2022.0776
中图分类号:S224.3;S49 文献标志码:A 文章编号:1008‐0864(2024)03‐0076‐15
在相当长的时间内,化学农药防治都是消灭或控制农林有害生物的主要措施。从15世纪开始,西方国家喷洒砷、汞和铅等有毒化学物质来毒杀害虫[1]。农药喷雾是目前国内外农药施用的最主要方法,即利用喷雾器械将液态农药分散成雾滴,输运到靶标植物,需要高度关注农药科学的施用方法,以提高农药施用效率并进一步降低风险[2-8]。随着高毒、高风险农药相继被禁用,高毒农药比例已经很低,国内外开发了一批高效、安全、环境友好型农药(包括生物农药),但也需要研究针对此类农药的施用技术以提高喷雾性能。
防治效果及喷雾性能优劣与喷雾过程中的状况直接相关,而农药喷雾过程较为复杂,不能单纯依赖数学工具进行分析,常规直接性能试验也有很大局限性,所得结论仅适于与试验条件相同的工况。对于处于研制阶段的农药喷雾装备,很难用试验方法去探索其喷雾机理及获取规律性结果,即使对于已商业化的喷雾机,限于设备体积或农药喷雾过程难以控制等因素,也不能全部采用直接试验方法,因此需要开展必要的喷雾过程模拟研究。模拟和仿真常可通用,但一般认为仿真的含义更广阔,涵盖了模拟,后者涉及物理相似,更偏重于物理效应。仿真建模是根据研究对象特点和仿真算法将系统数学模型转换为运行程序的过程,已逐渐成为研究客观事物的重要手段。仿真是建立实际系统模型(数学模型、物理效应模型或数学-物理效应模型),并利用所建模型对实际系统进行试验研究的过程。数值仿真计算在发现问题、研究参数影响趋势及改进设计等方面有经济高效和可重复的优势。喷雾过程仿真就是以相似原理、系统技术等为基础建立有效的喷雾系统模型,通过计算机和农药喷雾机械为模型工具,然后利用喷雾系统模型的核心作用,对已商业化或拟研制的农药喷雾系统进行研究,开展农药喷雾仿真试验和仿真分析。数值模拟仿真是建立在数学模型的相似原理基础上的一种方法,如可应用计算流体动力学(computational fluid dynamics,CFD)软件对喷雾喷头内部流场和雾滴输运过程等进行数值模拟[9]。模型是将系统、现象或过程的物理、数学或逻辑通过实体物理系统和数学模型进行表示,而数学模型包括原始系统数学模型和仿真系统数学模型,如基于喷雾距离和叶面积密度建立果园智能农药精确喷雾模型,集成Kinect视频传感器等,调整最佳喷洒距离和剂量来提高施药效率[10];建立农药精确施用的实体物理模型,与林木虚拟生长模型进行协同研究[3,11]等。因此,本文在农药喷施全生命周期的基础上,分析农药施用的抗性、再增猖獗、残留(resistance,resurgence, residue,3R)问题[2],农药施用的效果、效率、生态(efficacy, efficiency, eco-environment,3E)以及方法、模型、测试(method, model, measurement,3M),重点综述国内外喷雾过程的模拟研究发展现状,并提出喷雾过程模拟仿真的系列研究建议。
1 农药施用3R/3E/3M 及建模分析
从有机氯、有机磷、有机氮、氨基甲酸酯到拟除虫菌酯,从杀虫、杀菌到除草,从研究、生产到使用,农药及其施用技术和装备都获得了长足发展。与此同时,由于农药施用中存在3R问题,病虫草产生抗药性和天敌杀灭致生态失衡,病虫草害呈现逐年反复甚至加重现象,因此,要从农药全生命角度的5 个周期(研发、生产、流通、使用和使用后)更新农药管理理念,特别是农药的生产、流通、使用周期,农药对环境的污染会毒化大气、水系和土壤,并破坏农林有益生物群体,甚至危及人畜安全。
在农药的生产周期中,产生的“三废”如果不采取严格的处理,就可能使其蒸发到空气、流失到水体或土壤等,由此引起严重的环境污染事故。在农药的流通周期,如果包装、贮藏、销售和运输出现问题,农药也会扩散到空气、水体、土壤等,而且农药流通过程失控,会造成农药误用甚至违法行为。在农药的使用周期,需要实现3E目标,即增强病虫草害防控效果、提高农药使用效率、降低农药对生态环境的负面影响。当进行加药和混合操作时,操作者可能会接触到农药,农药有泄漏到土壤、水体或蒸发到空气中的风险;在农药喷雾过程中,因存在农药雾滴飘移和蒸发而影响空气、水体和土壤等;农药使用后,清洗喷雾机或其他设备时,废水会到达水体、土壤甚至会蒸发到空气中;当不合理焚烧或填埋废弃的农药容器时,会影响空气、水体和土壤等;所有的蒸发农药又会在空气中积聚,伴随降雨过程而再次影响水体和土壤[2]。因此,在农药管理的每个生命周期均存在不同程度的污染问题,本文重点关注农药使用周期的喷雾过程。
根据群体农药雾滴所处空间位置和状态可将喷雾全过程分为雾化过程、输运过程和沉积过程[12‐13]。农药喷雾过程各环节紧密相扣,互相影响,互为因果,可以通过3M关键环节来研究农药喷雾过程。其中,国内外对农药使用方法(method)开展了大量的研究和应用尝试,积累了丰富的经验[2-5,7‐8,12], 同时对农药喷雾性能开展了大量的测试(measurement)研究工作[13]。由于农药使用全生命周期过程的田间试验存在植物生长周期差异大、病虫害发生程度不同以及田间作业自然环境不可控等特点,因此可研究农药喷雾的理论模型和计算机模拟替代传统田间试验方法,缩短农药喷雾机械的研制周期,降低试验成本,提高机具设计的可靠性。
2 农药喷雾系统模拟仿真研究概况
基于农药喷雾过程中可能发生的混合、雾化、蒸发、飘移、滴落等建立的物理和数学模型,通过数值仿真计算,可研究某项或某几项参数对雾化、输运、沉积性能的影响。农药喷雾系统的雾化、输运、沉积等动态环节的建模非常复杂,数值仿真的准确度及精确性与基于喷雾过程的深刻理解而建立的物理模型及求解方法密切相关,需要深入分析喷雾过程系统特性。
2.1 雾化过程模型
雾化过程指的是雾滴离开喷头前的形成过程,包括农药管路输送、预混或在线混药、雾滴形成过程等环节,雾化过程模型研究包括雾化机理与雾化模型、喷头流量控制模型、在线混药模拟等。
2.1.1 雾化机理与雾化模型 喷头雾化过程和边界条件相对复杂,其机理研究和建模大都依赖经验数据和试验数据,国内外对扇形雾喷头、空心锥雾喷头、防飘喷头、静电喷头、离心喷头等开展了部分相关雾化机理与建模研究。
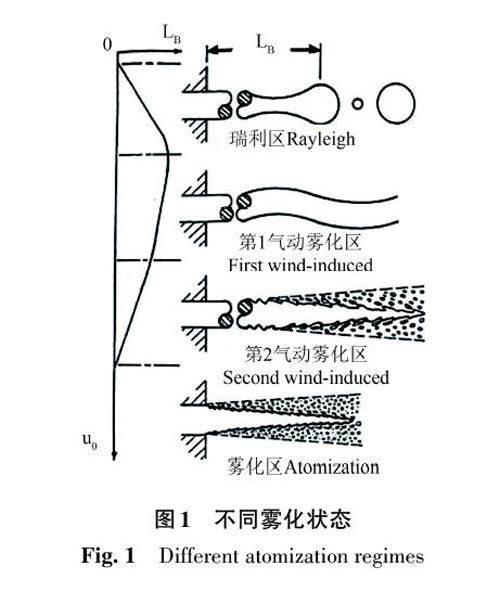
①扇形雾喷头。为了分析扇形雾喷头喷出液膜,构建农药雾化理论模型(图1),首先分析以喷射速度0~u0 从圆形喷口喷出的圆柱形液体射流在LB区域的不同雾化状态,在极低喷射速度的瑞利区,液柱破碎成直径大于原始液流的液滴,此时环境气流影响可忽略;随喷射速度增加,液流进入第1气动雾化区,液柱尺寸接近喷孔直径;随喷射速度进一步增加,到了第2气动雾化区,即不稳定的短波在液膜表面生长,并将其破碎成直径小于喷孔的液滴;在高喷射速度下,气动力足够大,可直接将液滴从液膜上剥离,产生的液滴比喷孔直径小1~2个数量级,液体喷出即在雾化区发生破裂。然后在简化以往相关模型的基础上建立雾化模型,可使用无量纲化模型参数和易测量参数,如工作压力、流量、喷嘴尺寸、喷雾角、农药及其表面张力等,通过这些参数的变化来预测雾滴尺寸(体积中径Dv0.5)的变化[14]。
②空心锥雾喷头。根据液体分散、速度和湍流的经典流体力学输运方程,采用Fluent开展空心锥雾喷头雾化建模,耦合液体质量分数和液体/气体表面积的输运方程,计算喷嘴内旋流和喷嘴外空心锥形膨胀液膜的两相流,估算索特平均直径,并利用模型研究各种压力的质量流率以及表面张力和表面活性剂对雾滴尺寸的影响情况[15]。
③防飘喷头。农药防飘移通常采用特定喷头结构、添加表面活性剂等方法以产生较大的雾滴。为了比较标准扇形雾喷头、前置孔喷头和吸气式喷头等的雾滴大小,采用k-ε 湍流模型在稳态下分别对其内部流动进行CFD数值模拟,发现湍流强度和湍流动能是防飘喷头增大雾滴尺寸的主要因素[16]。
④静电喷头。为了预测静电喷头雾化特性以控制雾化质量,采用群智能粒子群优化算法(particle swarm optimization,PSO)、正交试验分析和改进的最小二乘支持向量机(least squaresupport vector machine,LS-SVM)智能算法,建立了静电喷雾雾化特性的智能预测模型[17]。
⑤离心喷头。离心喷头包括转盘式、转笼式、转杯式和转刷式等,国内外对其建模开展了研究[9,18]。以Aerial-E 型电动转笼雾化器为控制对象,利用二次回归正交试验分析风速、施药流速、雾化器转速与雾滴粒径间的相关关系,建立雾滴粒径模型,通过对雾滴粒径影响因素的分析,添加补偿因子对模型进行第1次优化,得到第1次优化雾滴粒径补偿模型,然后利用机器学习分析第1次优化雾滴粒径补偿模型残差,得到第2次残差预测模型,将其与第1次优化雾滴粒径补偿模型线性叠加得到二次残差补偿雾滴粒径模型,同时对该模型进行等效变形,得到电动转笼的二次残差补偿雾化模型,最后通过试验验证模型的有效性[18]。
2.1.2 喷头流量控制模型 农药精确喷雾系统对喷头进行独立变量控制时往往需要建立喷头流量模型,国内外开展了大量的脉宽调制变量喷雾控制系统研究,并开展有关变量控制系统响应特性和建模仿真等研究[19‐20]。通过建立试验平台,能够精确控制喷雾压力、便捷设定脉冲宽度调制(pulse width modulation, PWM)参数,开展二次回归正交试验,建立喷头流量模型,然后进行模型普适性分析,表明模型计算流量和实际测量流量具有很好的一致性[21]。
2.1.3 在线混药模拟 喷雾机农药药水在线混合采用水箱和药箱分设,在农药施用过程中按需将农药和水在线混合,达到药、水、人分离,能安全、可靠、高效地施用农药,解决传统预混式混药造成的配制多余过量农药问题和消除残留农药对环境的污染,通过混药器内部流场数值模拟,有助于设计合理的混药器结构[3,22‐23]。为了实现农药在线与水或油混合,可以采取计量泵控制、射流(旋动射流)、阀控喷嘴直接注入、带缓冲罐预混式在线注入系统等不同的注入混合方式,基于CFD等开展模拟分析[3,24‐25]。采用模拟粒子代替水分散颗粒剂进行混药器的在线混合模拟试验,可实现基于双视角图像的粒子匹配和三维重构,分析在线混合效果[26]。农药有水溶性和脂溶性等不同剂型,脂溶性农药和助剂加水稀释搅拌后,以极小的油珠均匀分散在水中形成相对稳定的乳浊液,或以平均粒径2~3 μm的分散颗粒与水混合形成有明显分层现象的悬浮剂,不同于水溶性农药的混合过程,可通过混合机理与混合过程的数值模拟研究脂溶性农药的混合性能[3,27]。
2.2 输运沉降模型
输运过程指的是农药雾滴离开喷头后、到达靶标前的过程,从喷雾流场数值模拟与仿真、静电喷雾电场与流场模拟、植保无人机喷雾模型构建等方面综述输运沉降模型研究概况,由于飘移控制是农药施用的重要环节,农药雾滴飘移伴随着农药喷雾作业,会造成各种严重后果,将对农药雾滴飘移模拟及典型飘移算法模型建设和应用进行综述。
2.2.1 喷雾流场数值模拟与仿真 喷雾流场介于喷头和靶标之间,其状态直接关系喷雾性能优劣,对此国内外开展了大量的研究,包括流场数值模拟与仿真,如气动喷雾雾滴轨迹模型[28]、喷雾沉降动态分布模型[29]、风送喷雾气流场建模[30]、果园喷雾机气流速度场模拟[31]、离散相雾滴沉积模拟[32]、气辅式喷雾雾滴飘失建模[33]、雾滴沉积可视化模型[34]等。
2.2.2 静电喷雾电场与流场模拟 为研究荷电雾滴向植物靶标运行过程,分析电场梯度、空间电荷分布、雾滴尺寸和运行速度、喷雾机动力学、气候条件、植物物理特性等对雾滴充电效果及静电喷雾沉降性能的影响,开展静电喷雾电场与流场模拟研究以提高静电喷雾性能。如通过归纳描述不同电压下雾滴喷出时的雾化角的拟合计算公式,建立基于水平安装喷头产生的荷电雾滴的运动模型,根据时间增量法和粒子系统原理对这些雾滴的运动轨迹进行模拟[3,35]。
2.2.3 基于CFD和离散相粒子跟踪法的农药雾滴飘移模拟 通常可采用三维CFD模拟分析常规喷雾、风送喷雾等农药雾滴飘移的趋势,促进飘移控制方法的研究。如采用拉格朗日粒子跟踪多相流模型(Lagrangian particle tracking multiphase flowmodel),并结合喷雾雾化模型和喷雾机参数,通过CFD追踪雾滴路径,分析和预测喷杆喷雾机和果园喷雾机的垂直雾滴沉积分布和远程雾滴飘移状况[36]。为克服2D方法无法捕捉风向偏差、风幕尾迹不对称等问题,更好地掌握田间喷雾飘移机理,建立3D稳态CFD模型,并进行现场试验验证模型准确性,预测近距离(<5 m)飘移,但因增加的复杂性需要通过动态模拟和优化湍流扩散模型以改进远程飘移预测[37]。采用Navier-Stokes方程与k-ε 湍流模型求解空气流动(连续相)和拉格朗日粒子跟踪多相流模型跟踪空气中的雾滴(离散相),通过稳态条件下CFD模型,将3个年份种植梨树的三维冠层结构数据转换成具有多孔子域(porous subdomains)的三维虚拟几何图形,树冠周围的多孔子域表示叶片覆盖率,考虑叶面积密度和阻力系数的动量和动能损失,所有这些被整合到模型中来研究梨树冠层对果园喷雾的影响[38]。基于CFD粒子跟踪技术,建立离散相雾滴沉积量和沉积率的预测模型,在3 m×2 m×2 m长方体计算区域,分析三维空间中气流对雾滴飘移的影响[32]。基于CFD和离散相粒子跟踪法,在温室环境用气流辅助方式喷施农药时,模拟施药靶标周围流场中的雾滴运动轨迹,探寻雾滴附着靶标的行为[39]。基于CFD非稳态模拟,建立固定管道式常温烟雾系统在温室内作业的气流速度场仿真模型及雾滴沉积分布仿真模型,预测模拟常温烟雾系统气流速度场与雾滴沉积分布特性[40]。
2.2.4 典型飘移算法模型 美国环境保护署(Environmental Protection Agency, EPA)认为,评估农药对人类健康或环境的风险时,要考虑农药的毒性以及人或环境可能接触到的农药量,在评估接触情况时,会使用数学模型来预测食品、水、住宅和职业环境中的农药含量。EPA网站汇总了水生模型、陆地模型、大气模型和健康影响模型等。其中,大气模型是用来预测释放到大气中农药的沉积模式,包括AGDISP(agricultural dispersal)、AgDRIFT、PERFUM (probabilistic exposure andrisk model for fumigants)、SOFEA (soil fumigantexposure assessment) 和FEMS (fumigant exposuremodeling system)等[41]。
①AGDISP和AgDRIFT。AGDISPTM模型由美国农业部林务局开发,可以预测应用场所的喷雾飘移,旨在优化农业喷洒作业,具有描述喷洒区域上下风向释放、分散和沉积的详细算法。该模型可用于估算航空喷雾和地面喷杆喷雾中喷雾飘移的顺风沉降。AGDISP是基于拉格朗日的雾滴跟踪算法,输入喷雾机描述、喷杆喷嘴位置、雾滴尺寸分布、喷雾液体特性、喷雾高度和气象学等参数的喷雾模型,可处理侧风、飞机尾流、飞机产生湍流和环境湍流等对雾滴运动的影响,更新版本包括雾滴蒸发模型、雾滴沉降相关时间步长算法、光学冠层模型、顺风至20 km的远场高斯模型、跟踪挥发性活性喷雾液体的欧拉模型等[3,42-44]。航空喷雾预测模型AgDRIFT?是美国EPA、农业部和喷雾飘移工作组基于Windows合作研发的近尾流拉格朗日农业扩散(AGDISPTM)模型的扩展改进版本,包括拉格朗日轨迹分析、雾滴尺寸分布数据、基于D平方定律雾滴蒸发建模、固定翼和直升机模型、涡衰减效应和地面沉积协同模型等,可用于估算航空喷雾、地面喷杆喷雾和果园/葡萄园风送喷雾的喷雾飘移顺风沉积情况,能够评估预测液体农药下风沉积和空中释放的各种喷雾飘移沉积[45]。
②综合飘移预测模型。综合飘移预测模型是指将特定场景模型与通用飘移模型进行耦合而建立的模型。如将山谷飘移大气扩散/沉积模型(VALley DRIFT atmospheric dispersion/depositionmodel,VALDRIFT)和AGDISP的飞机尾迹模型进行耦合,生成用于预测喷洒在山谷中农药非靶标飘移的模型系统,即利用AGDISP近场喷雾模型对空气中农药喷雾雾滴的质量分数进行估计,然后利用VALDRIFT中的复杂地形模型对农药雾滴脱离靶标区域的飘移进行估计。其中,独立运行的AGDISP和VALDRIFT模型,通过用户创建的数据文件将AGDISP的处理结果输入VALDRIFT中,然后运行输出随时间变化的三维含量分布和地面沉积分布[46]。另外,通过综合递阶航空力学旋翼机模型(comprehensive hierarchical aeromechanics rotorcraftmodel,CHARM)和AGDISP融合的算法,可进行旋翼无人机喷雾飘移和沉积预测[3,47]。
2.3 沉积过程模型
沉积过程指的是农药雾滴到达靶标后的相互作用过程和弹跳、浸润、蒸发、持留、穿透、流失等行为,沉积过程模型关注靶标特征模拟、雾滴与靶标碰撞、雾滴沉积模拟与覆盖等[48-55]。
2.3.1 雾滴与靶标碰撞模型 基于雾滴与靶标作物交互机理建立的预测雾滴在叶片表面碰撞行为的雾滴碰撞模型,包括雾滴反弹模型和雾滴喷溅模型。雾滴与靶标碰撞与沉积过程和雾滴尺寸及分布、喷雾助剂、植物叶片及表面特性等许多因素相关,通过建模可以更好地研究雾滴与靶标碰撞及其后续弹跳、浸润、持留、蒸发等行为[48-55],如风送喷雾雾滴冠层穿透模型[56]、多尺度特征融合的柑橘冠层施药沉积量分类模型[57]、基于虚拟模型的雾滴与叶片的交互行为分析[58]、雾滴大小及叶片特性对农药沉积量影响[59]、毛茸叶片通用雾滴粘附模型[60]。对喷杆喷雾机喷洒除草剂进行建模,可确定最佳雾滴尺寸范围,分析改变喷雾沉积和雾滴持留模型的主要参数对雾滴飘移趋势和雾滴撞击结果的影响[61]。
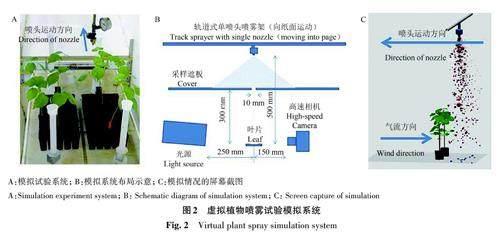
通过不同建模方法可探索构建喷雾雾滴和叶片之间发生的撞击和撞击后相互作用的数学模型,图2为虚拟植物喷雾试验模拟系统,其中A、B为试验系统及布局示意图,C为虚拟喷雾模拟系统的屏幕截图[62]。建立固体基底上薄层液膜流动的润滑模型,从真实棉花叶子的三维扫描重建形成虚拟叶子表面,研究叶片形貌与雾滴撞击后在叶片上的运动,以及雾滴在撞击时如何滞留在叶片上和与其他雾滴的合并相互作用;建立数学模型,利用流体、叶片表面和雾滴特性(包括喷雾试剂配方、植物类型和雾滴尺寸、速度和撞击角度),模拟虚拟叶片上的雾滴运动[63]、植物整体的喷雾沉积过程[64],建立喷雾-冠层相互作用模型[65],预测撞击时雾滴在干叶表面的附着、反弹或飞溅,描述反弹雾滴的出口速度和轨迹以模拟可能的二次捕获[62]。
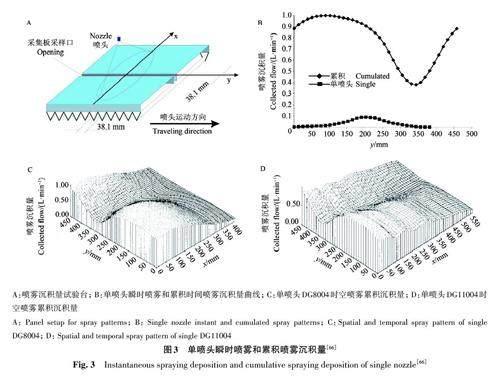
2.3.2 雾滴沉积模拟与覆盖模型 为模拟变量调制喷头的雾滴沉积覆盖特性,提出离散累积法并建立喷雾沉积量时空分布数学模型,通过喷雾沉积量试验台(图3A),测量单喷头瞬时喷雾沉积量,可计算获得单喷头瞬时喷雾和累积时间喷雾沉积量曲线(图3B);然后生成二维时空喷雾沉积量分布图,以直观展示可变量喷头的喷雾沉积性能。图3C为单喷头DG8 004时空喷雾累积沉积量(模拟速度16.0 km·h-1,占空比75%)情况。图3D为单喷头DG11004时空喷雾累积沉积量(模拟速度16.0 km·h-1,占空比75%)[66]。
利用3D植物结构、虚拟喷头等建立三维虚拟喷雾模型来研究早期草本植物的雾滴沉积持留特性[67]。通过实测Hardi LB-255型果园风送式喷雾机相关参数,确定二维流场边界条件及模型参数,基于CFD技术建立雾滴沉积分布模型并经试验验证,模型能较准确地描述雾滴沉积规律,可得到约束条件下的雾滴沉积轨迹及不同层面的沉积比率[68]。除草机器人药液喷洒模型的建立是提高对靶喷施精度的关键,在考虑风扰的前提条件下,根据液滴粒子轨迹动力学方程,结合机械臂连杆和关节变量参数,建立液滴喷洒轨迹模型,并推导得到液滴理论沉积覆盖区域;在此基础上通过计算机数值模拟,分析了喷头位姿、车速和风速对液滴落地沉积覆盖区域的影响,并对靶标点进行了坐标重构;在室内搭建小型开口直流低速风洞并进行药液喷洒验证试验,利用图像处理技术获取试验的液滴落地沉积覆盖区域[69]。针对农药雾滴难以穿透果树冠层及雾滴在叶背面附着率低等问题,研究感应电压、风机频率、喷雾距离和喷雾压力对雾滴覆盖率的影响,以正面、反面雾滴覆盖率及其比值为响应值建立二次回归风送静电喷雾覆盖率响应面模型[70]。基于正态分布概率密度函数建立雾滴飘移沉积双峰分布式数学模型,研究因风胁迫产生的雾滴飘移对雾滴沉积分布的影响规律,系统表达沉积范围与沉积量的关系[54]。常采用风洞和相关测试平台等对雾滴飘移进行测量和评价。通过风洞及喷雾系统进行喷雾试验,使用自动算法处理水敏纸(water sensitive paper, WSP)雾滴图像获取雾滴体积中径(Dv0.5)和表面覆盖率等参数,应用Levenberg-Marqurdt模型训练网络,建立人工神经网络模型来预测不同喷雾条件(喷头高度、压力、风速和Dv0.5)下的输出变量(喷雾机雾滴飘移)[71]。测试分析风洞中不同位置气吸扇形雾喷头和涡流气吸喷头产生的雾滴沉积和飘移,采用SPSS软件建立包含采样距离、风速、喷头类型和药剂类型在内的多变量非线性雾滴飘移特性模型,指导气象条件选择、雾滴沉积区域预测、缓冲隔离区确定、防飘施药技术研究和喷雾药剂药械配套等[72]。
2.3.3 喷雾靶标的表型特征及冠层物理效果模拟 植物个体及其根、茎、叶、花、果实、种子等器官是植物病害、虫害、鼠(兔)危害、有害植物等生物胁迫的直接靶标,为更好地开展农药雾滴与靶标的撞击过程模拟研究,需要针对靶标植物表型及可视化模拟进行研究。如通过光学相机采集模式植物的叶片宽度、长度、主茎长度、叶片间夹角、叶片面积等形态表型信息,拟合构建基于L-system的拟南芥时序生长可视化模型,可直观表达叶片面积与主茎生长过程[73];模拟喷雾场景与水稻冠层的交互场景,研究雾滴与叶片(植株)撞击等交互过程[74];以叶密度、风送喷雾出口风速和取样深度为试验变量,构建树冠内雾滴穿透比例二次指数数学模型,计算雾滴冠后飘移率,拓展模型应用[56];通过构建稀疏网络结构平衡各个模型子网间的计算量,利用3个Inception模块生成施药沉积量,通过柑橘冠层热红外图像的稠密有效特征数据,在模型卷积层与全连接层间接入空间金字塔池化网络(spatial pyramid poolingnetwork,SPP-Net),改进SPP-Net-Inception-v4 实现柑橘冠层热红外图像施药沉积量表现特征的提取与融合,构建多尺度特征融合的柑橘冠层施药沉积量分类模型[57];借助高速相机得到棉花叶片在风载下气流速度、叶面积、变形量的拟合关系,探索采用仿真棉花植株模型开展风送喷雾的气流雾滴胁迫和冠层孔隙变化对雾滴沉积性能的影响[75]。
2.4 喷雾系统及其部件评价模型
农药喷雾系统关键喷雾部件包括喷头、泵、风机、喷杆及喷雾控制系统等,其性能直接影响喷雾机械整机性能,选择仿形机构及仿形喷雾模型、喷头磨损模型、流场关键部件模拟、喷杆模型、资源消耗评价模型等进行综述。
2.4.1 仿形机构及仿形喷雾模型 仿形对靶喷雾技术是根据探测获得的靶标植物冠层形貌信息,自动调节喷头组到达理想喷雾距离进行对靶喷雾作业。运用正交试验设计、交叉评价网络训练法、样本标准化处理和主元分析等技术,优选网络结构及其参数,建立反映果树施药仿形喷雾过程参量与分布质量系数之间映射关系的BP(backpropagation)神经网络模型,可实现各种定量分析计算,如预测在特定过程参量下的分布质量系数或根据指定效果目标确定合适的喷雾参量等[76];为避免BP神经网络不稳定性和局部极小等缺点,利用遗传算法(genetic algorithm,GA)优化BP 神经网络的权系数,构建基于GA和BP的果树仿形喷雾神经网络混合模型,提高计算精度[77]。基于已有试验数据,构建三维空间中的仿形喷雾数学模型虚拟系统,虚拟雾滴在果树中飞行情况、反映实际喷雾关键元素、仿真喷雾沉积分布趋势[78]。基于低成本超声波传感器搭建一套植物冠层超声回波信号检测系统,建立基于圆柱面叶片分布模型的量化测试台,图4所示为冠层密度量化测试的正面3个(1、2、3)测试点分布,间距35 cm,在正交中心复合设计试验基础上,建立超声回波信号均值与冠层密度、探测距离的定量关系,即植物冠层密度量化模型,通过室内外测试表明,植物冠层密度量化模型对室内外的冠层密度测量均有较好的适用性,能实时改变喷雾参数实现仿形变量喷雾[79]。
2.4.2 喷头磨损模型 喷嘴磨损会导致过量使用农药,造成生产成本增加、地下水和地表水污染等,因此可通过研究喷嘴的磨损模型,预测和判断喷头的失效趋势,提高农药使用可靠性。选择影响喷嘴磨损率的使用时间、喷雾压力、喷嘴初始尺寸以及孔壁与流体间有效摩擦系数、喷嘴材料和流体等变量,建立用于预测扇形雾喷头喷嘴磨损率的数学模型,对新喷嘴和磨损喷嘴的喷雾模式测量证实,磨损主要增加了椭圆孔的短轴长度,而长轴端部的磨损非常小,模型和试验均表明,喷嘴磨损率随使用时间、喷雾压力、喷嘴孔壁与流体间有效摩擦系数以及椭圆孔的长短轴比的增加而增加[80]。模拟4种不同材料(黄铜、镀镍黄铜、塑料和不锈钢)的扇形雾喷头,采用对数线性模型建立回归模型和利用神经网络软件NeuroShell EasyPredictor开发神经网络模型来预测喷嘴磨损率,获取不同工作喷雾压力(138、256、552 kPa)下的喷嘴磨损率[81]。针对扇形雾喷头球头处复杂结构对磨损率的重要影响以及农药中固体颗粒对喷头内表面的冲蚀情况,运用立体几何方法建立扇形雾喷头球头结构的数学模型对其结构进行磨损分析,通过喷头冲蚀磨损试验,建立时间和基本结构尺寸变化的磨损率关系模型[82]。
2.4.3 风机流场与风幕模拟 风机是农药喷雾机械的重要流场部件,对喷雾性能起关键作用。利用综合三维软件Pro/Engineer(Pro/E)建立具有不同叶片出入口安装角、叶轮宽度、叶片数、叶片型式等结构参数的植保机械离心风机三维模型,通过流体动力学仿真软件FLUENT对不同参数的离心风机内部流场进行数值模拟,然后采用大型通用有限元分析软件ANSYS进行离心风机叶轮的受力分析,可为不同类型叶轮的优化设计提供参考[83]。采用风幕式防飘喷雾机,通常是在喷杆喷雾机的喷杆上增加风机和风筒,喷雾作业时在喷头上方沿喷雾方向强制送风形成风幕,增大雾滴的穿透力,在有风天气也可减小雾滴飘移,为减少雾滴飘移和降低风幕式喷雾所需功率,利用CFD软件包对几种风幕式防飘设计进行模拟飘移分析,获得最佳操作参数(射流速度与流量、喷杆长度、喷雾角等),结果表明,风幕式防飘移是减小飘移的可行替代方案[3,84]。
2.4.4 喷杆模型 利用基于非线性阻尼器特性的悬架数学模型,对大田喷雾机39 m喷杆的双摆垂直悬架动力学进行优化。通过对悬架进行建模,得到如下方程。
为了更有效地仿真评估机架上的力和扭矩,将液压执行器与流量阀相连,用加速度计进行现场测量。喷雾机的重量、惯性矩和重心位置等参数由Pro/E设计的虚拟样机确定。在创建的模型输入和输出间插入非线性阻尼器特性,将力-速度特性插入模型,分析减振器和弹簧位置,将不同情况下的大量喷雾机路径纳入优化过程,测量功率谱密度和喷杆振动以捕捉非线性特性,对优化后模型进行悬架性能及最佳阻尼设置等验证[85]。为了分析受土壤不均匀性影响的水平喷杆振动等造成的不规则喷雾,基于试验测量和模态分析技术,建立柔性喷雾机喷杆的模态模型,喷雾机在标准化崎岖道路上模拟田间输入力,将模态模型和输入力结合模拟喷杆运动,比较不同轮胎压力和行驶速度下的喷雾模式,指导开发新型喷雾机[86]。建立喷雾机多体系线性运动方程,其中Crolla轮胎模型考虑了对应满箱、半箱和空箱喷雾液体情况的轮胎接地接触长度,通过在标准轨道上模拟喷杆运动,生成相应的喷雾沉积分布,模型所需数据经测量可导入三维CAE-CAD-CAM 系统UNIGRAPHICS[87]。采用三维静态喷雾模型研究移动喷杆上喷头的喷雾沉降发现,喷杆的横摇运动和水平振动都会严重干扰喷雾沉积状况[88]。基于 ANSYS建立喷雾机喷杆弹性变形的有限元模型,开展数值模态分析验证,然后在 机械系统动力学自动分析软件ADAMS(automatic dynamicanalysis of mechanical systems)平台建立包括偏转、振荡和翻滚等典型运动的机架喷杆模型,对引起喷杆末端的弹性变形量进行谐响应分析,并开展喷杆运动仿真分析,据此在喷杆与机架间添加拉索来抑制因振荡造成喷杆的弹性变形[89]。
2.4.5 植保无人机喷雾模型 植保无人机旋翼风场分布特性、雾滴与无人机旋翼风场交互机理、雾滴沉降与飘移机理、雾滴与叶片表面的交互机理及雾滴分散和蒸发特性等是植保无人机施药技术的重要特性,通过无人机下洗流场预测模型构建和计算机模拟等可提供1 种替代田间试验的方法,促进植保无人机快速经济、可重复的研究[90‐91]。
2.4.6 固定翼航空喷雾模型 通过Burnham-Hallock 模型建立Thrush 510G 飞机的翼尖涡模型,以飞行试验得到的大气边界层流动特性为输入条件,采用CFD模拟无侧风和有侧风时的速度场,并在矩形平直机翼两侧喷杆各安装5 个AU5000转笼式喷头,利用欧拉-拉格朗日方法模拟雾滴运动,建立雾滴飘移沉积预测模型[92]。采用CFD对Y-5B航空固定翼飞机的气流场、雾滴运动轨迹和沉降分布进行模拟,研究在航高、喷量以及喷头安装角度等不同参数条件下雾滴的运动和沉积分布规律[93]。
2.4.7 资源消耗评价模型 选择典型地面风送喷雾机、单旋翼和六旋翼植保无人机进行果树施药试验,对比分析冠层雾滴沉积分布、雾滴穿透性、地面雾滴流失等主要喷雾效果指标,综合施水量、施药量、用工量、作业时长和作业能耗等指标,采用基于变异系数客观赋权法与主观赋权法2种线性加权方法,构建施药装备资源消耗水平评价模型,其中基于变异系数客观赋权法的评价模型综合指标值之间差异更明显,评价效果更符合实际[94]。
3 农药喷雾系统仿真建模研究展望
3.1 农药喷雾半实物仿真系统研究
植物是生命体,因此农药喷雾建模的难点之一是存在众多的未知因素,农药喷雾过程建模极为复杂,除要考虑田间环境、靶标特征、机具参数等因素外,也高度依赖准确的实时数据和历史数据,需要不断动态的调整建模过程。由于半实物仿真是对于难以建立数学模型进行纯数学模拟的系统或部件,以实物代之参与仿真试验,因此建议开展多物理场耦合的农药喷雾半实物仿真系统研究,以克服植物保护过程中的不确定因素,代之以实物参与动态建模,实体化的农药喷雾装置可包括供液及在线混合系统、系列喷头及快换系统、动力系统(泵与风机)等,甚至可将靶标植物以实物代之。依托虚拟化、智能化、协同化建模仿真技术的发展,进行植保机械农药喷雾过程与喷雾仿真模型、飘移与沉积模型、植物生长模型等及其耦合的研究[95],研究植保作业组织指派数学规划模型及其优化仿真模型求解算法,实现对农药喷雾机械的全流程、全剖面实物或虚拟作业的雾化机理、雾滴动力学、飘移控制、防治效果等的联合仿真,为高性能智能植保机械设计提供技术支撑。
农药喷雾半实物仿真系统的模型框架构建是农药喷雾建模的核心步骤,可应用数字孪生、增强混合现实VR/AR/MR(virtual reality/augmented reality/mixed reality)及其实时交互、大模型和大数据平台、智能算法和三维可视化建模等强技术支撑,突破异构多源多模态数据融合与协同控制、多维多尺度建模仿真等关键技术,建立以智能植保大脑信息系统(上位机)为核心的实时动态农药喷雾半实物仿真系统模型框架,并采用仿真系统VV&A(verification,validation & accreditation)方法,开展农药喷雾半实物仿真系统的校核、验证和确认工作。
模块化建模方法可将农药喷雾半实物仿真系统划分为一些典型元件(即模块)的组合,逐个建立各模块的数值模型并封装成独立的功能模块,同类元件(如喷头模块)使用同一模块模型,再通过一定规律的组合,建立整个农药喷雾半实物仿真系统的数值模型。如建立动力模块、喷头模块、靶标模块、环境场景生成模块等,通过喷雾控制模块、动力模块、靶标模块分别控制喷雾控制系统实现供液及在线混合、喷头选择及喷雾执行,控制靶标模块模拟靶标特征参数等,同时研究喷雾测试的实体系统,包括雾谱测量、雾滴流场测试、沉积效果测试,结合靶标检测喷药防治效果,可进行喷雾参数在线修改、任意变量在线监测等。
喷雾控制模块需要准确地判断靶标特征信息、机具参数,并结合全面分析田间环境形势、详实可信的历史数据以及科学预测的发展态势等综合因素进行设计;动力模块需要基于机具负载及喷雾动力需求、田间道路条件及环境风速干扰因素等参数进行设计;靶标模块需要分析病虫害传播规律、植物生长环境及特征提取等许多细分因素,通过农药喷雾过程等形成的海量数据进行计算和模拟,查找病虫害综合治理的关键因素和重要环节;环境场景生成模块可结合风洞进行温湿度工作参数调控等。
可探索自主开发农药喷雾半实物仿真系统软件平台,也可选用通用商业化的半实物仿真系统,通过二次开发设计农药喷雾半实物仿真系统,根据需要不断扩充试验模块内容。另外,为了能在田间试验环境进行实物测试,可以开发便携式测试系统(包括各类传感器),采用通信接口将田间信息与上位机进行远程通信,开展田间半实物农药喷雾仿真研究。
3.2 农药喷雾过程模拟创新研究建议
3.2.1 创建雾化模型开展新型喷头雾化机理研究 基于云计算、边缘计算等设计农药喷雾过程的综合模拟模型,利用仿真软件对喷头内部流场进行三维数值模拟研究,建立喷头雾化过程单雾滴数学模型和群体雾滴模型,研究雾化过程及雾滴运动轨迹、速度分布和蒸发速率等参数,深化雾化理论,促进不同雾化方式的雾化机理研究,指导开发新型喷头。
3.2.2 群体农药雾滴多相流场模拟研究 深入研究群体农药雾滴的沉降过程,建立稀疏相多相流场模拟,进行三维流场建模仿真,包括静电喷雾的多物理场耦合研究等。
3.2.3 靶标定制与识别模型研究 靶标特征对雾滴沉积过程影响巨大,通过靶标模拟与靶标定制,开展靶标与雾滴互动机制研究。靶标定制建议采用机械定制(修剪)、生物定制(智能纳米生物材料对靶标进行修饰而对靶施药、基因操作定制植物表型)、电磁定制(电场作用靶标电刺激昆虫)、农艺定制等。如针对无人机在高度、对靶、飘移、反应时间可能存在的问题,研究内置遥感平台识别病虫害模型。对于根系病虫害的隐蔽性,开展根系模型与根系病虫害靶标模型研究,探索根系病虫害精准防治技术。
3.2.4 综合雾滴飘移模型研究 分析农药喷雾雾滴的运动规律及其与靶标植物冠层内外有关气候因素等的关联性,根据有害生物防治特点建立特色场景的综合雾滴飘移模型,开展涵盖地面喷雾机械和航空喷雾机械的雾滴飘移分析预测,研究高效防飘喷雾技术。
3.2.5 植物生长模型与农药喷雾系统耦合研究 分析植物生长模型与农药喷雾系统的耦合模式,通过病虫草害靶标传感识别、植保机械及农药喷雾环境信息,形成智能驱动的植物生长与农药喷雾耦合系统模型,从而根据靶标冠层物理特征、植物病虫草害发生情况作出准确预测,以确定精确的喷雾时机。
4 结语
目前,使用农药仍是解决全球饥荒的重要保障手段,针对农药喷雾环境的不确定性和动态变化,需通过模拟仿真研究原创植保技术和高质量植保机械,不断探索农药精确施用方法,在综述雾化过程、输运沉降、沉积过程等模型以及喷雾系统及其部件评价模型的基础上,本着精确、对靶、智能的路径,依靠AI、大模型、各类算法等研究农药喷雾技术,提出了研究雾化模型及新型喷头雾化机理、群体农药雾滴多相流场模拟、靶标定制与识别模型、综合农药雾滴飘移模型、植物生长模型与农药喷雾系统耦合等建议,以精确控制农药喷雾过程。
参 考 文 献
[1] 郑加强,徐幼林,张慧春,等. 国内外植保机械发展及智能化
有害生物综合治理系统展望[J].中国植保导刊,2022,42(3):
20-28.
ZHENG J Q, XU Y L, ZHANG H C,et al .. Development of
domestic and abroad plant protection machinery and prospects
of intelligent integrated pest management system [J]. China
Plant Prot., 2022, 42(3): 20-28.
[2] 郑加强,周宏平,徐幼林.农药精确使用技术[M]. 北京:科学
出版社,2006:1-180.
[3] 郑加强,徐幼林.环境友好型农药喷施机械研究进展与展
望[J].农业机械学报,2021,52(3):1-16.
ZHENG J Q, XU Y L. Development and prospect in
environment-friendly pesticide sprayers [J]. Trans. Chin. Soc.
Agric. Machin., 2021,52(3):1-16.
[4] 傅泽田,祁力钧,王俊红. 精准施药技术研究进展与对策[J].
农业机械学报,2007,38(1):189-192.
FU Z T, QI L J, WANG J H. Developmental tendency and
strategies of precision pesticide application techniques [J].
Trans. Chin. Soc. Agric. Machin., 2007,38(1):189-192.
[5] 何雄奎. 中国植保机械与施药技术研究进展[J].农药学学
报,2019, 21(5-6): 921-930.
HE X K. Research and development of crop protection
machinery and chemical application technology in China [J].
Chin. J. Pestic. Sci., 2019, 21(5-6): 921-930.
[6] KANG S, LUMACTUD R, LI N, et al .. Harnessing chemical
ecology for environment-friendly crop protection [J]. Phytopathology,
2021,111:1697-1710.
[7] BODE L E, BRETTHAUER S M. Agricultural chemical
application technology: a remarkable past and an amazing
future [J]. Trans. Am. Soc. Agric. Biol. Eng., 2008, 51(2):
391-395.
[8] GILES D K, AKESSON N B, YATES W E. Pesticide
application technology: research and development and the
growth of the industry [J]. Trans. Am. Soc. Agric. Biol. Eng.,
2008, 51(2): 397-403.
[9] 郑加强,周宏平,刘英,等.现代林业机械设计方法学[M].北
京:中国林业出版社, 2015:1-510.
ZHENG J Q, ZHOU H P, LIU Y, et al .. Modern Design
Methodologies of Forestry Machineries [M]. Beijing: China
Forestry Publishing House, 2015:1-510.
[10] GAO G D, XIAO K, LI J P. Precision spraying model based on
Kinect sensor for orchard applications [J]. Appl. Eng. Agric,
2018, 34(2): 291-298.
[11] 唐雨生,郑加强,张慧春.农药精确施用模型及其与林木虚拟
生长模型协同研究综述[J].世界林业研究,2016,29(6):54-58.
TANG Y S, ZHENG J Q, ZHANG H C. Research review on
precision pesticide application model and its synergy with
virtual forest growth model [J]. World For. Res., 2016, 29(6):
54-58.
[12] 袁会珠,郑加强,何雄奎,等. 农药使用技术指南[M]. 北京:化
学工业出版社,2004:16-370.
[13] 郑加强,张慧春,徐幼林,等.农药喷雾全过程性能分析及其
测试技术研究进展[J].林业工程学报,2022,7(1):1-10
ZHENG J Q, ZHANG H C, XU Y L, et al .. Development and
prospect on performance analysis and measurement techniques
of pesticide spraying process [J]. J. For. Eng., 2022,7(1):1-10
[14] SCOTT L P, ANDREW J H. Flat-fan spray atomization
model [J]. Trans. Am. Soc. Agric. Biol. Eng., 2018, 61(4): 1249-
1256.
[15] LUCA M D, VALLET A, BORGHI R. Pesticide atomization
modeling for hollow cone nozzle [J]. Atomiz. Sprays, 2009,
19(8): 741-753.
[16] LAFFERTY C L, TIAN L F. Using computational fluid
dynamics to determine the effect of internal nozzle flow on
droplet size [C]// 2001 ASAE Annual Meeting. Sacramento,
CA: 2001.
[17] 刘春景,郑加强,王科元.静电喷头雾化特性预测模型[J].农
业机械学报,2009,40(4):63-68.
LIU C J, ZHENG J Q, WANG K Y. Model for atomization
performance of electrostatic spraying nozzle [J]. Trans. Chin.
Soc. Agric. Machin., 2009, 40(4): 63-68.
[18] 赵春江,柴舒帆,陈立平,等.电动转笼二次残差补偿雾化模
型建立与试验[J].农业机械学报,2020,51(4):19-27,37.
ZHAO C J, CHAI S F, CHEN L P, et al .. Establishment and
experiment of quadratic residual compensation atomization
model of electricity atomizer [J]. Trans. Chin. Soc. Agric.
Mach., 2020,51(4):19-27,37.
[19] GOPALAPILLAI S, TIAN L, ZHENG J Q. Evaluation of a
spray control system for variable rate herbicide applications [J].
Trans. Am. Soc. Agric. Biol. Eng., 1999, 42(4): 863-870.
[20] 陈勇,郑加强.精确施药可变量喷雾控制系统的研究[J].农
业工程学报,2005, 21(5):69-72.
CHEN Y, ZHENG J Q. Control system for precision pesticide
application based on variable rate technology [J]. Trans. Chin.
Soc. Agric. Eng., 2005,21(5):69-72.
[21] 翟长远,王秀,密雅荣,等. PWM变量喷雾喷头流量模型[J].
农业机械学报, 2012,43(4): 40-44.
ZHAI C Y, WANG X, MI Y R, et al .. Nozzle flow model of
PWM variable-rate spraying [J]. Trans. Chin. Soc. Agric.
Machin., 2012,43(4): 40-44.
[22] LUCK J D, SHEARERS S A, LUCK B D, et al .. Recalibration
methodology to compensate for changing fluid properties in an
individual nozzle direct injection system [J]. Trans. Am. Soc.
Agric. Biol. Eng., 2016, 59(3):847-859.
[23] XU Y L, WANG X W, ZHENG J Q, et al .. Simulation and
experiment on agricultural chemical mixing process for direct
injection system based on CFD [J]. Trans. Chin. Soc. Agric.
Eng., 2010, 26(5):148-152.
[24] 周良富,傅锡敏,薛新宇,等. 基于CFD的射流式在线混药装
置设计与试验[J]. 农业机械学报, 2013, 44(增刊1):107-112.
ZHOU L F, FU X M, XUE X Y, et al .. Design and experiment
of jet mixing apparatus based on CFD [J]. Trans. Chin. Soc.
Agric. Mach.,2013,44(S1): 107-112.
[25] 欧鸣雄,贾卫东,邱白晶,等.射流混药装置变工况流场特性
试验与数值分析[J].农业机械学报,2015,46(9):107-111.
OU M X, JIA W D, QIU B J, et al .. Experiment and numerical
analysis of flow field in jet mixing device under variable
working conditions [J]. Trans. Chin. Soc. Agric. Mach., 2015,
46(9): 107-111.
[26] 代祥,徐幼林,郑加强,等. 基于3D图像重构的水分散粒剂在
线混合分析方法与试验[J]. 农业机械学报, 2020, 51(5):
98-107.
DAI X, XU Y L, ZHENG J Q, et al .. Analysis method and
experiments of inline mixing water dispersible granules
pesticides based on 3D image reconstruction [J]. Trans. Chin.
Soc. Agric. Mach., 2020, 51(5):98-107.
[27] 宋海潮,徐幼林,郑加强,等. 旋动射流混药器螺旋弯曲收缩
管螺距和分流器位置的模拟优化分析[J]. 中国农业科技导
报, 2019, 21(9): 84-89.
SONG H C, XU Y L, ZHENG J Q, et al .. Simulation
optimization analysis of shrinking tube pitch and splitter
position of rotating jet mixer [J]. J. Agric. Sci. Technol., 2019,
21( 9) : 84-89.
[28] SIDAHMED M M, BROWN R B. Simulation of spray dispersal
and deposition from a forestry airblast sprayer-part II: droplet
trajectory model [J]. Trans. Am. Soc. Agric. Biol. Eng., 2001,
44(1): 5-17.
[29] LEBEAU F. Modelling the dynamic distribution of spray
deposits [J]. Biosys. Eng., 2004,89(3): 255-265.
[30] DELELE M A, MOOR A D E, SONCK B, et al .. Modeling and
validation of the air flow generated by a cross flow air-sprayer
as affected by travel speed and fan speed [J]. Biosys. Eng.,
2005, 92(2): 165-174.
[31] 傅泽田,王俊,祁力钧,等. 果园风送式喷雾机气流速度场模
拟及试验验证[J]. 农业工程学报,2009,25(1):69-74.
FU Z T, WANG J, QI L J, et al .. CFD simulation and
experimental verification of air-velocity distribution of airassisted
orchard sprayer [J]. Trans. Chin. Soc. Agric. Eng.,
2009, 25(1): 69-74.
[32] 孙国祥,汪小旵,丁为民,等. 基于CFD 离散相模型雾滴沉积
特性的模拟分析[J]. 农业工程学报,2012,28(6):13-19.
SUN G X, WANG X C, DING W M, et al .. Simulation analysis
on characteristics of droplet deposition base on CFD discrete
phase model [J]. Trans. Chin. Soc. Agric. Eng., 2012, 28(6):
13-19.
[33] 苑进,刘雪美,张晓辉,等. 考虑自然风的气辅式喷雾雾滴漂
失特性建模与补偿[J]. 农业工程学报,2013,29(14): 45-52.
YUAN J, LIU X M, ZHANG X H, et al .. Modeling and
compensation for characteristic of droplet drift on air-assisted
boom spraying accounting for wind speeds [J]. Trans. Chin.
Soc. Agric. Eng., 2013,29(14): 45-52.
[34] 张慧春,周宏平,郑加强,等. 喷头雾化性能及雾滴沉积可视
化模型研究[J]. 林业工程学报, 2016, 1(3):91-96.
ZHANG H C, ZHOU H P, ZHENG J Q, et al .. A study of spray
nozzle atomization performance and droplet deposition visual
model [J]. J. For. Eng., 2016, 1(3):91-96.
[35] 茹煜,贾志成,周宏平,等.荷电雾滴运动轨迹的模拟研究[J].
中国农机化,2011(4):51-55.
RU Y, JIA Z C,ZHOU H P, et al ..Research on moving trajectory
simulation of charged droplets [J]. Chin. Agric. Mechan., 2011
(4):51-55.
[36] DELELE M A, JAEKEN P, DEBAER C, et al .. CFD
prototyping of an air-assisted orchard sprayer aimed at drift
reduction [J]. Comput. Electron. Agric., 2007, 55(1): 16-27.
[37] BAETENS K, NUYTTENS D, VERBOVEN P, et al ..
Predicting drift from field spraying by means of 3D
computational fluid dynamics model [J]. Comput. Electron.
Agric., 2007, 56(2): 161-173.
[38] ENDALEW A M, HERTOG M, DELELE M A, et al .. CFD
modelling of the effect of pear tree canopy on air-assisted
orchard spraying [J]. Acta Hortic., 2008, 802:73-79.
[39] 王景旭,祁力钧,夏前锦. 靶标周围流场对风送喷雾雾滴沉
积影响的CFD 模拟及验证[J]. 农业工程学报,2015,31(11):
46-53.
WANG J X, QI L J, XIA Q J. CFD simulation and validation of
trajectory and deposition behavior of droplets around target
affected by air flow field in greenhouse [J].Trans. Chin. Soc.
Agric. Eng., 2015, 31(11): 46-53.
[40] 李雪,陆岱鹏,王士林,等.固定管道式常温烟雾系统雾滴沉
积仿真与试验[J]. 农业机械学报,2020,51(增刊2):261-
267,315.
LI X, LU D P, WANG S L, et al .. Simulation and test on
droplet distribution and deposition of fixed-pipe cold fogging
system in greenhouse [J].Trans. Chin. Soc. Agric. Mach., 2020,
51(S2):261-267,315.
[41] USEPA. Models for pesticide risk assessment [DB/OL].(2020-
12-27) [2022-08-15]. https://www.epa.gov/pesticide-science-andassessing-
pesticide-risks/models-pesticide-risk-assessment.
[42] MILTON E T, HAROLD W T, BRADLEY K F. Modeling
aerially applied sprays: an update to AGDISP model
development [J]. Trans. Am. Soc. Agric. Biol. Eng., 2019, 62(2):
343-354.
[43] TESKE M E, THISTLE H, LONDERGAN R J. Modification of
droplet evaporation in the simulation of fine droplet motion
using AGDISP [J]. Trans. Am. Soc. Agric. Biol. Eng., 2011, 54(2):
417-421.
[44] SCHOU W C, FORSTER W A, MERCER G N, et al .. Building
canopy retention into AGDISP: preliminary models and results [J].
Trans. Am. Soc. Agric. Biol. Eng., 2012, 55: 2059-2066.
[45] MILTON E T, SANDRA L B, DAVID M E, et al .. AgDRIFT?:
a model for estimating near-field spray drift from aerial
applications [J]. Environ. Toxicol. Chem., 2002,21(3):659-671.
[46] ALLWINE K J, HAROLD W T, MILTON E T, et al .. The
agricultural dispersal‐valley drift spray drift modeling system
compared with pesticide drift data [J]. Environ. Toxicol. Chem.,
2002,21(5 ):1085-1090.
[47] MILTON E T, DANIEL A W, HAROLD W T. Prediction of
aerial spray release from UAVs [J]. Trans. Am. Soc. Agric.
Biol. Eng., 2018,61(3): 909-918.
[48] LIU X H, LIU X M, LI Y, et al .. Predicting spray deposit
distribution within a cotton plant canopy based on canopy
stratification porosity and Gaussian process models [J]. Biosys.
Eng., 2021,204: 1-14.
[49] MERCER G N, SWEATMAN W L, FORSTER W A. A model
for spray droplet adhesion, bounce or shatter at a crop leaf
surface [J]. Mathematics Ind., 2010, 15: 945-951.
[50] FORSTER W A, ZABKIEWICZ J A, KIMBERLEY M O, et al ..
A universal spray droplet adhesion model [J]. Trans. Am. Soc.
Agric. Biol. Eng., 2005, 48(4): 1321-1330.
[51] HONG S, ZHAO L, ZHU H. SAAS, a computer program for
estimating pesticide spray efficiency and drift of air-assisted
pesticide applications [J]. Comput. Electron. Agric., 2018,155:
58-68.
[52] HONG S, ZHAO L, ZHU H. CFD simulation of pesticide spray
from air-assisted sprayers in an apple orchard: tree deposition
and off-target losses [J]. Atmospheric Environ., 2018, 175:
109-119.
[53] 李继宇,郭爽,姚伟祥,等. 气流作业下雾滴粒径稻株间分布
特性与风洞模拟试验[J]. 农业机械学报, 2019, 50(8):
148-156.
LI J Y, GUO S, YAO W X, et al .. Distribution characteristics of
droplet size in rice field and wind tunnel simulation test under
airflow operation [J]. Trans. Chin. Soc. Agric. Mach., 2019,
50(8): 148-156.
[54] 梁昭,范国强,王光明,等. 基于双峰分布的风胁迫雾滴沉积
分布模型研究[J]. 农业机械学报, 2020,51(4): 28-37.
LIANG Z, FAN G Q, WANG G M, et al .. Distribution model of
wind-stressed droplet deposition based on bimodal distribution [J].
Trans. Chin. Soc. Agric. Mach., 2020, 51(4): 28-37.
[55] SEDANO C G, AGUIRRE C A, RONDAN G A, et al ..
Numerical simulation of spray ejection from a nozzle for
herbicide application: evaporation and binary collision
models [J/OL]. Comput. Electron. Agric., 2020, 175: 105551
[2022-08-15]. https://doi.org/10.1016/j.compag.2020.105551.
[56] 孙诚达,柳长鼎. 风送喷雾雾滴冠层穿透模型构建及应
用[J]. 农业工程学报, 2019,35(15): 25-32.
SUN C D, LIU C D. Construction and application of droplet
canopy penetration model for air-assisted spraying pattern [J].
Trans. Chin. Soc. Agric. Eng., 2019, 35(15): 25-32.
[57] 陆健强,林佳翰,邓小玲,等. 多尺度特征融合的柑橘冠层施
药沉积量分类模型[J]. 农业工程学报, 2020,36(23): 70-76.
LU J Q, LIN J H, DENG X L, et al .. Classification model for
citrus canopy spraying deposition based on multi-scale feature
fusion [J]. Trans. Chin. Soc. Agric. Eng., 2020, 36(23): 70-76.
[58] 丁维龙,金梦杰,罗临风,等. 基于虚拟模型的雾滴与叶片的
交互行为分析[J]. 农业工程学报. 2017, 33(14): 48-56.
DING W L, JIN M J, LUO L F, et al .. Behavior analysis of
spray droplet interacting with plant leaves based on virtual
model [J]. Trans. Chin. Soc. Agric. Eng., 2017, 33(14): 48-56.
[59] 杨希娃,代美灵,宋坚利,等. 雾滴大小、叶片表面特性与倾
角对农药沉积量的影响[J]. 农业工程学报,2012, 28(3):
70-73.
YANG X W, DAI M L, SONG J L, et al .. Effect of droplet size,
leaf characteristics and angle on pesticide deposition [J].
Trans. Chin. Soc. Agric. Eng., 2012, 28(3): 70-73.
[60] NAIRN J J, FORSTER W A, LEEUWEN R M V.“ Universal”
spray droplet adhesion model-accounting for hairy leaves [J].
Weed Res., 2013, 53(6): 407-417.
[61] COCK N D, MASSINON M, SOFIENE O T S, et al ..
Investigation on optimal spray properties for ground based
agricultural applications using deposition and retention models [J].
Biosys. Eng., 2017,162: 99-111.
[62] MAYO L C. Mathematical modelling of the impaction and
spreading of spray droplets on leaves [D]. Brisbane:
Queensland University of Technology, 2015.
[63] MAYO L C, MCCUE S W, MORONEY T J, et al .. Simulating
droplet motion on virtual leaf surfaces [J/OL]. Royal Soc. Open
Sci., 2015, 2(5): 140528 [2022-08-15]. https://doi.org/10.1098/
rsos.140528.
[64] DORR G J, FORSTER W A, MAYO L C, et al .. Spray retention
on whole plants: modelling, simulations and experiments [J].
Crop Prot., 2016, 88: 118-130.
[65] DORR G J, KEMPTHORNE D M, MAYO L C, et al .. Towards
a model of spray-canopy interactions: interception, shatter,
bounce and retention of droplets on horizontal leaves [J]. Ecol.
Modell., 2014, 290(C): 94-101.
[66] TIAN L, ZHENG J. Dynamic deposition pattern simulation of
modulated spraying [J]. Trans. ASAE, 2000,43(1):5-11.
[67] MASSINON M, DUMONT B, COCK N D, et al .. Study of
retention variability on an early growth stage herbaceous plant
using a 3D virtual spraying model [J]. Crop Prot., 2015,78 :
63-71.
[68] 祁力钧,赵亚青,王俊,等. 基于CFD 的果园风送式喷雾机雾
滴分布特性分析[J]. 农业机械学报,2010,41(2):62-67.
QI L J, ZHAO Y Q, WANG J, et al .. CFD simulation and
experimental verification of droplet dispersion of air-assisted
orchard sprayer [J]. Trans. Chin. Soc. Agric. Mach., 2010,
41(2): 62-67.
[69] 权龙哲,郦亚军,王旗,等. 考虑风扰的对靶喷雾机械臂药液
喷洒动力学建模与试验[J]. 农业机械学报, 2018,49(6):
48-59.
QUAN L Z, LI Y J, WANG Q, et al .. Modeling and testing on
liquid pesticide spray of serial manipulator target weeding
robot considering wind disturbance [J]. Trans. Chin. Soc.
Agric. Mach., 2018, 49(6): 48-59.
[70] 周良富,张玲,丁为民,等.风送静电喷雾覆盖率响应面模型
与影响因素分析[J]. 农业工程学报, 2015,31(增刊2): 52-59.
ZHOU L F, ZHANG L, DING W M,et al .. Droplet coverage
response surface models and influencing factors of air-assisted
electrostatic spray [J]. Trans. Chin. Soc. Agric. Eng., 2015,
31(S2): 52-59.
[71] AZIZPANAH A, RAJABIPOUR A, ALIMARDANI R, et al ..
Precision spray modeling using image processing and artificial
neural network [J]. Agric. Eng. Int.: CIGR J., 2015,17(2):65-74.
[72] 张慧春, DORR G,郑加强,等. 喷雾飘移的风洞试验和回归
模型[J]. 农业工程学报,2015,31(3):94-100.
ZHANG H C, DORR G, ZHENG J Q, et al .. Wind tunnel
experiment and regression model for spray drift [J]. Trans.
Chin. Soc. Agric. Eng., 2015, 31(3): 94-100.
[73] 张慧春,王国苏,边黎明,等. 基于光学相机的植物表型测量
系统与时序生长模型研究[J]. 农业机械学报, 2019,50(10):
197-207.
ZHANG H C, WANG G S, BIAN L M, et al .. Visible camera
based 3D phenotype measurement system and time series
visual growth model of plant [J].Trans. Chin. Soc. Agric. Mach.,
2019,50(10):197-207.
[74] 罗临风.喷雾场景与水稻冠层交互场景模拟[D].杭州:浙江
工业大学,2017.
LUO L F. Simulation of interaction between spray scene and
rice canopy [D]. Hangzhou: Zhejiang University of Technology,
2017.
[75] 刘雪美,宋来其,崔慧媛,等. 气流雾滴胁迫和冠层孔隙变化
对沉积性能影响解耦研究[J]. 农业机械学报, 2021,52(8):
117-126.
LIU X M, SONG L Q, CUI H Y, et al .. Decoupling study on the
influence of air droplets stress and canopy porosity change on
deposition performance in air-assisted spray [J]. Trans. Chin.
Soc. Agric. Mach., 2021,52(8):117-126.
[76] 林惠强,肖磊,刘才兴,等.果树施药仿形喷雾神经网络模型
及其应用[J].农业工程学报,2005,21(10): 95-99.
LIN H Q, XIAO L, LIU C X, et al .. Neural network model for
profile modeling spray of chemical to fruit trees and its
applications [J]. Trans. Chin. Soc. Agric. Eng., 2005, 21(10):
95-99.
[77] 林惠强,刘财兴,洪添胜, 等. 基于GA的果树仿形喷雾神经
网络混合模型研究[J]. 农业工程学报, 2007,23(10): 167-171.
LIN H Q, LIU C X, HONG T S, et al .. Neural network mixed
model for profile modeling spray of fruit trees based on GA [J].
Trans. Chin. Soc. Agric. Eng., 2007, 23(10): 167-171.
[78] 刘财兴,林慧强,洪添胜,等. 果树仿形喷雾的虚拟研究[J].农
业工程学报,2007,23(7):133-138.
LIU C X, LIN H Q, HONG T S, et al .. Simulation of profile
modeling spray of fruit trees [J]. Trans. Chin. Soc. Agric. Eng.,
2007, 23(7): 133-138.
[79] 南玉龙,张慧春,郑加强,等. 基于圆柱面模型的仿形喷雾植
物冠层密度超声量化测试[J]. 农业机械学报, 2019,50(1):
209-216.
NAN Y L, ZHANG H C, ZHENG J Q, et al .. Ultrasonic
quantification test of plant canopy density based on cylindrical
surface model [J]. Trans. Chin. Soc. Agric. Mach., 2019, 50(1):
209-216.
[80] ZHU H,REICHARD D L,OZKAN H E,et al ..A mathematical
model to predict the wear rate of nozzles with elliptical orifices [J].
Trans. ASAE, 1995, 37(5): 1297-1303.
[81] KRISHNASWAMY M, KRISHNAN P. PM-power and machinery:
nozzle wear rate prediction using regression and neural
network [J]. Biosys. Eng., 2002,82(1):53-64.
[82] 翟恩昱,郑加强.扇形喷头球头结构建模与磨损试验[J].农
业机械学报,2011, 42(8):65-69.
ZHAI E Y, ZHENG J Q. Spherical-top structure mathematical
model and wear experiments of flat-fan nozzle [J]. Trans. Chin.
Soc. Agric. Mach., 2011,42(8):65-69.
[83] 陈晓.小型离心风机叶轮结构优化与试验[D].北京:中国农
业科学院,2016.
CHEN X. Optimization and experiment on small centrifugal
fan impeller structure [D]. Beijing: Chinese Academy of
Agricultural Sciences,2016.
[84] TSAY J, FOX R D, OZKAN H E, et al .. Evaluation of a
pneumatic-shielded spraying system by CFD simulation [J].
Trans. ASAE, 2002, 45(1): 47-54.
[85] ANTHONIS J, AUDENAERT J, RAMON H. Design
optimisation for the vertical suspension of a crop sprayer boom [J].
Biosys. Eng., 2005,90(2),153-160.
[86] LANGENAKENS J, RAMON H, DE BAERDEMAEKER J. A
model for measuring the effect of tire pressure and driving
speed on horizontal sprayer boom movements and spray pattern [J].
Trans. ASAE, 1995, 38(1): 65-72.
[87] RAMON H, DE BAERDEMAEKER J. A modelling procedure
for linearized motions of tree structured multibodies 2: design
of an active spray boom suspension on a spraying-machine [J].
Comput. Structures, 1996, 59(2): 361-375.
[88] ROMAN H, MISSOTTEN B, DE BAERDEMAEKER J. Spray
boom motions and spray distribution: part 2, experimental
validation of the mathematical relation and simulation results [J].
J. Agric. Eng. Res., 1997, 66(1): 31-39.
[89] 何耀杰,邱白晶,杨亚飞,等. 基于有限元模型的喷雾机喷杆
弹性变形分析与控制[J].农业工程学报,2014,30(6):28-36.
HE Y J, QIU B J, YANG Y F, et al .. Deformation analysis and
control of elastic deformation for spray boom based on finite
element model [J]. Trans. Chin. Soc. Agric. Eng., 2014, 30(6):
28-36.
[90] 王涛, 文晟, 兰玉彬, 等. 基于PINNs的单旋翼植保无人机下
洗流场预测模型[J]. 农业工程学报, 2023, 39(6): 83-91.
WANG T, WEN S, LAN Y B, et al .. Prediction model for the
downwash flow field of single-rotor plant protection UAV using
PINNs [J]. Trans. Chin. Soc. Agric. Eng., 2023, 39(6): 83-91.
[91] TANG Q, ZHANG R, CHEN L, et al .. Numerical simulation of
the downwash flow field and droplet movement from an
unmanned helicopter for crop spraying [J/OL]. Comput.
Electron. Agric., 2020, 174: 105468 [2022-08-15]. https://doi.
org/10.1016/j.compag.2020.105468.
[92] 张斌.航空施药雾滴飘移实验及数值模拟研究[D].西安:西
北工业大学, 2018.
ZHANG B. Experimental and numerical study of aerial
spraying droplet drift [D]. Xian: Northwestern Polytechnical
University, 2018.
[93] 李宗飞.固定翼飞机喷雾流场模拟及雾滴分布规律研究[D].
南京:南京林业大学,2019.
LI Z F. Simulation of spray flow field simulation and
distribution of droplets in fixed-wing aircraft [D]. Nanjing:
Nanjing Forestry University, 2019.
[94] 陈炳太,郑永军,江世界,等.果园施药机械资源消耗水平评
价模型研究[J].农业机械学报,2020,51(增刊2):289-297.
CHEN B T, ZHENG Y J, JIANG S J, et al .. Resource
consumption evaluation model of orchard spray machinery [J].
Trans. Chin. Soc. Agric. Mach., 2020, 51(S2):289-297.
[95] 焦祥,郑加强,张慧春,等. 树木虚拟动态生长多因子协同模
型及耦合研究综述[J].世界林业研究,2016,29(1):47-51.
JIAO X,ZHENG J Q,ZHANG H C, et al .. Research review of
multi-factor collaboration model and its coupling for dynamic
growth of virtual trees [J]. World For. Res., 2016,29(1):47-51.
(责任编辑:胡立霞)
猜你喜欢
科技创新导报(2016年21期)2016-12-17
时代金融(2016年29期)2016-12-05
职业(2016年11期)2016-11-23
科教导刊(2016年26期)2016-11-15
戏剧之家(2016年19期)2016-10-31
考试周刊(2016年77期)2016-10-09