自适应橡胶树干外形抱紧装置模型构建与拓扑优化
2024-05-30 11:53:39肖苏伟曹建华陈娃容贾倩吴思浩邓祥丰
中国农机化学报 2024年5期
关键词:拓扑优化
肖苏伟 曹建华 陈娃容 贾倩 吴思浩 邓祥丰


摘要:針对天然橡胶全自动采胶装备的运动作业形式,设计一种可实现橡胶树干自适应包络夹持的抱紧装置,对该装置的工作原理、组成结构、抓取模式和自适应包络抓取特性等方面进行阐述与分析,为优化抱紧装置的设计提供依据。采用ANSYS workbench软件进行有限元分析,结果显示:实际工况下抱紧装置的最大总形变量为0.01 m,其发生在柔性导轨前端,各形变量均较小且与抱紧装置实际受力情况相符;所受最大应力为0.45 MPa,应力集中在柔性导轨与支撑板连接处。但其存在较大的材料冗余,对抱紧装置进行拓扑优化,按照30%、40%、50%、70%的材料去除率分别计算,结构优化后的质量由0.53 kg降至0.39 kg,结果表明,在保障强度与刚度的要求下,降低抱紧装置材料冗余量,可满足作业需求。并对抱紧装置的样机开展定性和定量测试试验,通过反馈数据进行分析,得出抓取模式的受力情况,夹持效果较好。
关键词:橡胶树干;包络夹持;抱紧装置;拓扑优化
中图分类号:S794.1
文献标识码:A
文章编号:2095-5553 (2024) 05-0029-07
收稿日期:2022年7月4日 修回日期:2022年9月16日*基金项目:国家重点研发计划(2020YFD1000600);海南省科技项目(ZDYF2021GXJS009);海南省自然科学基金项目(521QN0937,323MS074)
第一作者:肖苏伟,男,1987年生,南京人,硕士,工程师;研究方向为农业机械化工程。E-mail: 80096501@qq.com
通讯作者:邓祥丰,男,1995年生,海口人,硕士,研究实习员;研究方向为农业机械化工程。E-mail: 928010405@qq.com
Model construction and topology optimization of adaptive rubber trunk contour holding device
Xiao Suwei1, 2, Cao Jianhua1, 2, Chen Warong1, 2, Jia Qian1, 2, Wu Sihao1, 2, Deng Xiangfeng1, 2
(1. Rubber Research Institute, Chinese Academy of Tropical Agricultural Sciences, Haikou, 571101, China;
2. Mechanical Sub-center of National Important Tropical Crops Engineering Technology Research Center,
Haikou, 571101, China)
Abstract:
Aiming at the moving operation form of automatic rubber extraction equipment of natural rubber, a kind of holding device which can realize the adaptive envelope holding of rubber trunk was designed. The working principle, composition structure, grasping mode and adaptive envelope grabbing characteristics of the device were described and analyzed, providing basis for optimizing the design of holding device. ANSYS Workbench software was used for finite element analysis, and the results showed that the maximum total shape variable of the holding device was 0.01 m in the actual working condition, which occurred at the front end of the flexible guide rail, and all the shape variables were small and consistent with the actual force of the holding device. The maximum stress was 0.45 MPa, and the stress was concentrated at the connection between the flexible guide rail and the support plate. However, it had a large material redundancy. The topological optimization of the holding device was carried out, and the mass of the optimized structure was reduced from 0.53 kg to 0.39 kg according to the material removal rates of 30%, 40%, 50% and 70%, respectively. The results showed that the reduction of material redundancy of the holding device could meet the operation requirements under the requirements of ensuring the strength and stiffness. Qualitative and quantitative tests were carried out on the prototype of the holding device, and through the analysis of feedback data, the force situation of the grasping mode was obtained, and the clamping effect was good.
Keywords:
rubber trunk; envelope clamping; holding device; topology optimization
0 引言
天然橡胶是我国重要战略物资,国内种植面积超1 133.33 khm2。由于近年价格低迷,导致胶工外流、胶树弃割、胶园弃管等现象日益严重,对产业的发展形成冲击与制约[1],造成产业每年损失达数十亿元,同时,割胶作业投入的劳动力成本占整个生产作业70%以上[2, 3]。采胶装备在进行作业时,由于橡胶园的生长环境较为复杂,且会受到采胶装备移动速度、树干外廓径围不规整、树型生长倾斜性等因素影响,造成作业过程中采胶装备的定位精度会受到干扰,影响装备对树体的位置进行判断。因此,需要由特定的机构与橡胶树树体实现固定,以此为据点完成树皮的切割作业。
橡胶树干抱紧装置类似于机械手,在夹持树干过程中需要一定的抓持刚度和稳定性,目前国内外学者在该领域进行了相关研究:姚双吉等[4]对欠驱动机械手夹持刚度、阻尼与夹持几何位形的关系进行研究,并分析其自适应性对夹持稳定性的影响。Odhner等[5]开发了具有结构简单、适度灵巧性的低成本欠驱动机械夹持手,建立夹持机构与物体之间的无摩擦、有摩擦、弹性接触等模型,并分析该类模型的刚度矩阵能够适应复杂的抓取对象。Kragten等[6]以静态抓取平衡为稳定性准则,分析平面夹持的稳定性和夹持刚度,设计一种欠驱动夹持机构,并对尺寸参数优化。
本文设计一种可实现橡胶树干自适应包络夹持的抱紧装置,开展结构设计、运动学分析,对夹持树干过程进行理论分析与试验。基于ANSYS Workbench软件,采用变密度法对抱紧装置的柔性导轨进行拓扑优化,根据边界条件的设定与约束,达到结构合理优化的目的,并对质量、应力、形变量等方面进行比较,从而实现柔性导轨的结构优化。通过开展定量和定性试验,验证设计和分析结构的合理性,以便后期应用在全自动割胶装备上。
1 树干抱紧装置模型构建与工作原理
1.1 模型构建与工作原理
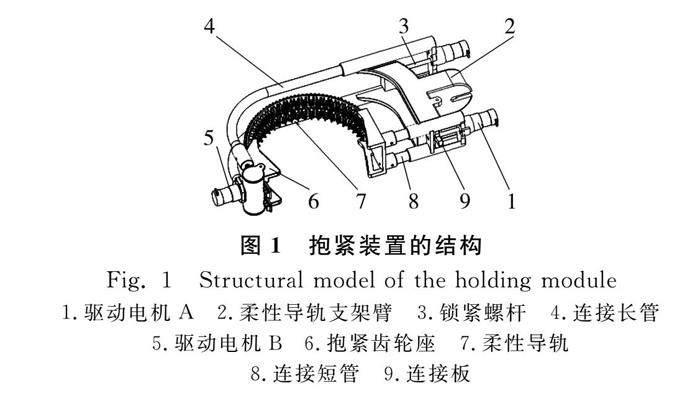
抱紧装置为移动式全自动采胶机的关键部件,其主要组成部分包括:锁紧螺杆、柔性导轨支架臂、驱动电机A、驱动电机B、连接板、连接短管、连接长管、柔性导轨、抱紧齿轮座以及其他紧固零陪件组成,如图1所示。该树干抱紧装置可装载于天然橡胶采胶机械装备上,实现应用对象在橡胶园内的移动采胶式作业模式,起到固定采胶作业点位、保障刀具对树皮的准确切割等作用效果。
由柔性导轨支架臂、连接长管构成了抱紧装置的主体支架,在驱动电机A和驱动电机B共同驱使下,作用力施加在连接短管、抱紧齿轮座上,让柔性导轨分别做径向运动与圆周运动,最终实现了抱紧装置对橡胶树干的设计功能要求。主要作业技术参数如表1所示。
如图2所示,通过电机带动驱动齿轮,使上下齿轮与柔性导轨上的齿型发生啮合,并使连接板在柔性导轨支架臂的凹槽内滑动以及连接短管的往复运动,由于连接板与柔性导轨支杆相连,最终实现柔性导轨的自由伸展与收缩功能。通过电机的带动柔性导轨会径向收缩,鉴于树干表层生长的不规则性,设计在环型面上的仿形齿会贴合于树干表面,由于柔性导轨本身的柔韧性可配合仿形齿,较好地适应不同径围大小的橡胶树干,以此来实现树干抱紧的作业功能。
1.2 夹持过程分析
根据抱紧装置结合实际工况中遇到的问题综合分析与设计抱紧装置的,在夹持树干时可能受到径围大小、移动位置等因素影响,造成抱紧装置与树干相对位置出现空间偏差。因此,将夹持动作简约化并建立受力点,从几何关系上对夹持偏差进行分析,讨论夹持受力点与夹持力的关系,如图3所示。
两夹持接触点B、B′的距离D受到树干径围影响会發生变化,但橡胶树干直径大小有所差异,在柔性导轨两侧的夹持受力接触点B、B′处分别与树干质点O进行连线,而BO、B′O线的偏转夹角β需通过树干径围条件来确定定位误差,因此,在设计抱紧装置时,需结合偏转夹角β与夹持受力接触点B、B′的距离D,来考虑柔性导轨的径围设计尺寸,最终能够保障对树干的包络性夹持。从式(1)可确定橡胶树树干半径与偏转夹角β取值范围之间的关系联立。
2.3 结构拓扑优化分析
选取Shape Optimization模块,构建柔性导轨的拓扑优化项目,依次进行模型导入、定义材料属性、网格划分以及边界条件施加等选项[17],按30%、40%、50%、70%的材料保留处理率完成设定,具体的求解计算结果如图6所示。
根据柔性导轨的拓扑优化结果,针对性地对其结构设计进行优化。综合考虑整体的强度、刚度及生产制造成本等因素,确定柔性导轨的材料保留率在30%~40%之间,经后期的结构重塑得到如图7所示的优化柔性导轨模型,优化后的模型将导轨之间的材料去除。
基于变密度法的拓扑优化设计理论,对柔性软轨进行重新建模,如图8和图9所示,将拓扑优化后的三维模型,再次导入ANSYS Workbench软件中进行有限元分析,模型的网格、约束、载荷等边界条件设置与优化前保持不变。拓扑优化后的柔性导轨整体结构,与初始的形态特征相比,最大应力、最大变形量均有下降。
在不改变原有力学设计性能的条件下,优化后的柔性导轨的整体结构达到减少材料用量的要求。对比如图10所示。
通过优化前后的结构对比参数可知:抱紧装置主体质量由0.53 kg减少到0.39 kg,相比原先减少26.4%;优化后柔性导轨上下轨层之间的结构空间增大;且优化后部件所受应力、形变量与优化前大幅减少,最终达到结构整体力学性能不变的情况下,实现柔性导轨的轻量化设计要求。
3 拓扑结构优化与树干夹持试验分析
3.1 柔性导轨优化前后的性能对比分析
为探究优化过后的柔性导轨强度与刚度是否满足全自动采胶机的作业性能要求,现对优化后的模型进行静力学计算分析,并从最大形变、最大应力、最大能量以及质量四个方面将优化前后的柔性导轨特性进行对比,结果如表2所示。
由表2可知,优化后柔性导轨的最大变形、最大应力、最大能量以及整体质量均有一定幅度降低,分别为75.3%、53.3%,并且满足选用材料的最大承载范围内,同时,由于柔性导轨在作业时存在着一定程度上的疲劳弯曲,因此物理特性参数的整体下降,又能够增加导轨的重复作业次数。综上考虑,可认为对柔性导轨所进行的拓扑优化在保证其强度与刚度下,能够满足柔性导轨的轻量化设计要求,对模型的整体结构优化效果良好。
3.2 田间试验
开展定性的树干夹持特性试验,验证抱紧装置的直线平夹精确捏持和自适应包络抓取有效性,如图11所示。柔性导轨的包络性自适应抓取树干过程,可以概括为六个步骤,分别是接近树干、建立稳定接触、抱紧树干、松开树干、调整姿态以及离开树干。通过装载于移动式全自动采胶装备上,以此为牵引进行对橡胶树树干的夹持性作业,由传感器对夹持点位、夹持力的判断,配合完成树干抱紧的动作。
在橡胶园分别选取树干径围约200 mm、240 mm、280 mm的橡胶树进行夹持试验,通过在不同径粗树干上的对比测试发现,在自适应包络夹持的模式下,抱紧装置的仿形齿均能较好地贴合在树干表面上,具有良好的夹持稳定性,抱紧装置对橡胶树树干的夹持效果较好,表明所设计的抱紧装置在作业时具备较好的夹持稳定性。定性抓取试验结果表明,根据抱紧装置的结构设计方式进行作业,在一定程度上可实现对较为复杂的树干外形采取自适应包络夹持。
4 结论
1) 基于材料各向同性模型的结构质量轻量化方法(SIMP),对天然橡胶全自动采胶机的树干抱紧装置进行主体结构的拓扑优化设计分析。
2) 对优化后的柔性导轨结构进行模型重构,再次导入ANSYS workbench中进行优化前后模型的结构应力对比分析,在保存原本结构性能的同时,对抱紧装置主体结构部分实现在不影响树干夹持能力与结构强度刚度的前提下达到整体轻量化目的。
3) 通过对优化后的柔性导轨进行有限元分析,结果表明,抱紧装置主体质量由0.53 kg减少到0.39 kg,相比原先减少26.4%;优化后柔性导轨上下轨层之间的结构空间增大;且优化后部件所受应力、形变量相比于优化前分别降低53.3%、75.3%,最终实现在保证整体结构力学性能基本不变的情况下,完成对柔性导轨轻量化的设计目的。优化过后的模型在强度与刚度方面均满足要求。整体结构的材料冗余量大幅降低,优化设计在理论上取得较好效果。
参 考 文 献
[1] 王学雷. 一种基于混联机构的割胶机器人运动控制技术研究[D]. 北京: 中国农业大学, 2018.
Wang Xuelei. Research on motion control technology of rubbertapping robot based on hybrid mechanism [D]. Beijing: China Agricultural University, 2018.
[2] 魏芳, 校现周, 罗世巧, 等. 橡胶树针刺采胶技术的应用前景[J]. 热带农业科学, 2020, 40(10): 17-20.
Wei Fang, Xiao Xianzhou, Luo Shiqiao, et al. Application prospect of rubber tree puncture tapping [J]. Chinese Journal of Tropical Agriculture, 2020, 40(10): 17-20.
[3] 杨文凤, 黄学全, 校现周. 从割胶技术方面解决胶工短缺的探讨[J]. 中国热带农业, 2015(5): 7-10.
[4] 姚雙吉, 石岩, 赵丁选, 等. 欠驱动形状自适应气动夹具夹持稳定性[J]. 机械工程学报, 2018, 54(20): 189-196.
Yao Shuangji, Shi Yan, Zhao Dingxuan, et al. Underactuated shape self-adaptive pneumatic fixture clamping stability [J]. Journal of Mechanical Engineering, 2018, 54(20): 189-196.
[5] Odhner L U, Jentoft L P, Claffee M R, et al. A compliant, underactuated hand for robust manipulation [J]. The International Journal of Robotics Research, 2014, 33(5): 736-752.
[6] Kragten G A, Van der Helm F C T, Herder J L. A planar geometric design approach for a large grasp range in underactuated hands [J]. Mechanism and Machine Theory, 2011, 46(8): 1121-1136.
[7] 王文玥, 赵清海, 张洪信, 等. 比例—积分—微分控制算法求解结构拓扑优化问题[J]. 机械科学与技术, 2021, 40(2): 223-229.
Wang Wenyue, Zhao Qinghai, Zhang Hongxin, et al. Proportional-integral-differential control method on solving structural topology optimization problems [J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(2): 223-229.
[8] 羅磊, 黄威, 黄琳, 等. 柔性化夹具静动态特性分析及拓扑优化[J]. 机械设计与研究, 2020, 36(1): 141-148.
Luo Lei, Huang Wei, Huang Lin, et al. Static and dynamic characteristics analysis and topology optimization of flexible fixture [J]. Machine Design & Research, 2020, 36(1): 141-148.
[9] 任帅阳, 高爱民, 张勇, 等. 六旋翼植保无人机旋翼折叠机构有限元分析及拓扑优化[J]. 中国农机化学报, 2021, 42(9): 53-58, 194.
Ren Shuiyang, Gao Aimin, Zhang Yong, et al. Finite element analysis and topology optimization of folding mechanism of six-rotor plant protection UAV [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(9): 53-58, 194.
[10] 闫晓磊, 谢露, 陈佳文, 等. 一种密度约束的拓扑优化方法[J]. 机械科学与技术, 2021, 40(3): 350-355.
Yan Xiaolei, Xie Lu, Chen Jiawen, et al. A density-constrained topological optimization method [J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(3): 350-355.
[11] 赖欣, 师靖远, 彭天宇, 等. 爬壁机器人变密度拓扑优化吸附结构研究[J]. 机械科学与技术, 2021, 40(6):821-827.
Lai Xin, Shi Jingyuan, Peng Tianyu, et al. Research on adsorption structure of wall climbing robot with variable density topology optimization [J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(6): 821-827.
[12] Luo Y, Xing J, Kang Z. Topology optimization using material-field series expansion and Kriging-based algorithm: An effective non-gradient method [J]. Computer Methods in Applied Mechanics and Engineering, 2020, 364: 112966.
[13] Lim J, You C, Dayyani I. Multiobjective topology optimization and structural analysis of periodic spaceframe structures [J]. Materials & Design, 2020, 190: 108552.
[14] 胡启国, 周松. 考虑刚柔耦合的工业机器人多目标可靠性拓扑优化[J]. 计算机集成制造系统, 2020, 26(3): 623-631.
Hu Qiguo, Zhou Song. Multiobjective reliability topology optimization analysis of rigid-flexible coupling industrial robots [J]. Computer Integrated Manufacturing Systems, 2020, 26(3): 623-631.
[15] 聂文建. 基于变密度拓扑优化方法的算法改进研究[D]. 大连: 大连理工大学, 2019.
Nie Wenjian. Research on algorithmmodifications based on density-based topology optimization [D]. Dalian: Dalian University of Technology, 2019.
[16] 张永杰, 徐红梅, Jay H Kim, 等. 锤片式饲料粉碎机架板的有限元分析及拓扑优化[J]. 华中农业大学学报, 2019, 38(5): 159-167.
Zhang Yongjie, Xu Hongmei, Jay H Kim, et al. Finite element analyses and topology optimization of hammer feed grinder frame plate [J]. Journal of Huazhong Agricultural University, 2019, 38(5): 159-167.
[17] 周方思, 李立君, 欧阳益斌. 基于ANSYS的除草机车架轻量化研究[J]. 林业工程学报, 2017, 2(6): 103-109.
Zhou Fangsi, Li Lijun, Ouyang Yibin. Lightweight research of mower frame based on ANSYS [J]. Journal of Forestry Engineering, 2017, 2(6): 103-109.
猜你喜欢
物联网技术(2017年4期)2017-05-16 10:09:21
江苏农业科学(2017年4期)2017-05-08 12:13:23
江苏农业科学(2016年12期)2017-04-05 16:43:20
中国新通信(2016年24期)2017-03-08 18:52:59
计算机辅助工程(2016年5期)2016-11-25 21:48:16
计算机辅助工程(2016年5期)2016-11-25 07:20:19
科技视界(2016年22期)2016-10-18 15:37:54
企业技术开发·下旬刊(2016年6期)2016-07-06 03:37:30
汽车工程学报(2016年1期)2016-03-25 17:57:10
汽车工程学报(2016年1期)2016-03-25 17:24:33