船舶操纵性海试实验虚拟仿真设计与应用
2024-05-17 18:04史琪琪马程前
实验室研究与探索 2024年4期
史琪琪, 马 宁, 马程前
(上海交通大学a.海洋工程国家重点实验室;b.船舶海洋与建筑工程学院;c.海洋装备研究院,上海 200240)
0 引 言
操纵性是船舶重要的航行性能,它反映船舶保持与改变航向、航速及位置的能力,对船舶投入运营后的航行安全性和经济性影响显著。随着船舶业界设计建造技术的发展,目前全球在役船舶的吨位和航速都持续提升,船舶操纵性能研究的重要性也随之日趋显著[1]。船舶在建造完工后会开展海域试航,用于检验船舶的操纵性、快速性、主辅机性能等是否达到规定的技术指标及船级社相关规范要求;其中操纵性试验主要包括回转试验、急停试验和Z 形试验等,是确认船舶能否满足保持或改变运动状态相关规范要求的重要手段[2-4]。
虚拟现实(Virtual Reality,VR)技术的发展,使得依托计算机图形学原理及相关控制显示设备等,形成有沉浸感的三维虚拟实验环境成为可能[5-7]。基于VR的虚拟实验测试工作,将VR技术与传统实验测试技术相结合,形成以计算机辅助为基础的新型实验测试手段,应用于工程实践中可显著降低测试费用、减少实验风险,覆盖现实中出现的大部分环境条件,不受时间、地点、气候等因素的影响[8-10]。在船舶性能测试方面,VR 技术的应用可为船舶运营的安全性提供全面保障[11]。
为弥补船舶海试成本高、风险大、准备时间长等不足,本文基于VR 技术,结合船舶操纵性数值计算方法,开展船舶操纵性海试实验虚拟仿真的设计与应用研究。通过自主开发船舶操纵性海试实验虚拟仿真系统,实现对船舶操纵性能的虚拟仿真预报评估;梳理形成实验虚拟仿真完整流程,探索基于VR 技术的实验教学新模式,为学生了解船舶操纵性海试完整过程提供良好的虚拟实验环境;并以集装箱船为例开展应用实践。船舶操纵性海试实验虚拟仿真能实现虚拟环境下船舶航行全过程中人机互动的准确模拟,使学生未登船而有真实的上船体验和感性认识,沉浸式了解船舶操纵性海试的完整过程,加强对船舶操纵性实验相关规程及操纵性预报方法的认识与理解,对培养学生的探究精神与工程实践能力具有重要意义。
1 实验虚拟仿真设计
1.1 实验虚拟仿真的设计架构
船舶操纵性海试实验虚拟仿真以船舶操纵性数值预报算法为基础,结合VR技术、3D成像投影技术等,突破船舶操纵性分析方法与VR 技术融合应用等难点,构建完整的实验系统架构,实现虚拟环境下船舶操纵性海试全过程的模拟仿真,采用多路立体信号同步演示,实现求解器分析结果在三维虚拟环境中的实时展示,有效支撑虚拟环境下的船舶操纵性海试实验教学。
船舶操纵性海试实验虚拟仿真系统的构建,包括计算程序编制、船舶及环境建模、VR平台搭建与模块间接口开发。系统基于船舶操纵性海试的基本规程,完成船舶海试过程的操纵性计算模拟,通过接口传输,实现船舶操纵性计算的实时运动结果传入VR系统和预设模型参数设置指令与数据的反馈,完成对船舶操纵性海试过程的模拟。实验虚拟仿真整体设计架构如图1 所示。
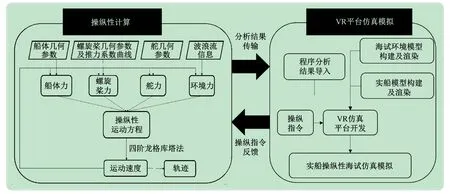
图1 船舶操纵性海试实验虚拟仿真设计架构
其中,核心的三自由度(纵荡-横荡-首摇)船舶操纵性计算程序基于船舶操纵性运动数学模型研究小组(Ship Manoeuvring Mathematical Model Group,MMG)模型自主开发[12-14],船体黏性操纵性水动力系数和附加质量等通过经验公式计算获得,螺旋桨力通过敞水曲线及船桨干扰系数伴流分数和推力减额系数计算获得,舵力通过垂直于舵叶面的正压力与舵角等计算获得,方程通过四阶龙格库塔法选择合适的时间步长进行计算,获得操纵性海试过程中实时船舶速度和位置坐标信息。
基于MMG分离式模型获得的纵荡、横荡、艏摇三自由度操纵运动模型:
式中:m、Izz分别为船舶的质量和艏摇惯性矩;mx、my和Jzz分别为船舶纵向附加质量、横向附加质量和艏摇附加惯性矩;下标H、P、R 分别为船体力、螺旋桨力和舵力。其中,附加质量力估算依据周绍明对元良图谱的回归公式获得[15]。
1.2 实验虚拟仿真的模块组成
根据船舶操纵性海试实验虚拟仿真的整体设计架构,实验系统由船舶操纵性计算、VR 仿真(含船舶与环境模型)、计算与VR仿真模块间接口等构成。
(1)船舶操纵性计算模块。结合国内外船舶操纵性计算方法研究进展,依据船舶海试规程,基于MMG操纵数学模型完成船舶操纵性计算程序的自主开发,计算程序实现各型船舶在不同装载下的静水及规则波中的回转、急停和Z 形试验等操纵性海试时域模拟,实现船舶运动参数及轨迹信息的实时输出,为系统实现对操纵性虚拟海试典型实验的VR模拟提供船舶运动时历等关键参数与信息。
(2)VR仿真模块与船舶模型。基于VR 与三维建模技术,依托Unity3D平台完成船舶操纵性海试VR系统的构建,导入Maya 构建的多型船舶模型与海试环境模型,实现多端口船型参数变换/数据输入、不同海试场景模拟、关键数据实时显示、视角切换、实验数据下载管理及后处理结果显示等功能,并同步直观展示实验全过程,根据操作者的操纵指令实现船舶操纵性海试的仿真。
(3)计算模块与VR仿真模块间的接口。完成计算程序与VR平台间的接口开发,实现操纵性计算与VR仿真模块间数据与指令的实时传输。VR 平台操作者输入的船舶及操纵性参数实时反馈至计算模块输入端,经计算程序运行,将运动时历等数据实时传输至VR平台,在VR平台实现船舶模型的精准运动模拟。
1.3 实验虚拟仿真的创新点
船舶操纵性海试实验虚拟仿真可对不同装载工况下的油船和集装箱船等各型船舶开展实验研究,通过自定义参数设计,实现实验对象船型的全覆盖;实验类型包含船舶操纵性海试中执行的回转、急停和Z 形等试验,实现对实验对象操纵性能的全面衡量。船舶操纵性海试实验虚拟仿真在方案建设、关键技术应用等方面都实现了创新。
(1)基于VR技术提出船舶操纵性海试实验虚拟仿真系统建设方案,完善船舶专业实验课程体系。将VR、3D 成像投影等技术应用于船舶操纵性能分析领域,形成船舶操纵性海试实验虚拟仿真方案,创新教学方法,采取“理论学习—VR沉浸式操作—船舶操纵性海试快速虚拟仿真”的“三位一体”教学模式,使学生在实验室中即能自主完成船舶操纵性海试过程模拟,快速掌握船舶操纵性基本原理和分析方法,提高教学效果。
(2)应用仿真建模技术,确保实验全过程模拟的准确性。实验系统开发,引入精准仿真建模技术,准确构建多型对象船舶与海洋环境模型;实验过程中,全面考虑多种不同海洋环境因素(包括风、浪、流、浅滩、有限水域等)的组合影响,兼顾系统响应实时性,将求解器分析数据结果在虚拟三维环境中进行同步转换,保证仿真画面的流畅与实验全过程中环境与船舶运动的准确模拟。
2 实验虚拟仿真实施与应用
2.1 实验虚拟仿真环境与系统开发
船舶操纵性海试实验虚拟仿真包含VR 头显版、大屏版(操作场景见图2)、单机版和网络版等多个版本。线下实验教学使用前3 个版本实验系统,依托实验室的3D LED 大屏、追踪相机、控制手柄、主动立体式3D眼镜及VR头盔等硬件设备开展,确保虚拟实验的沉浸感;线上教学采用网络版仿真系统,通过访问预设的实验网页链接,实现全流程操作。

图2 船舶操纵性海试实验虚拟仿真系统(大屏版)操作场景
船舶操纵性海试实验虚拟仿真系统的主要参数与关键技术指标见表1,系统中船舶模型按照指定对象的主尺度与型线构建,模型尺寸、外形准确;海域环境条件根据不同的风浪等级精准模拟;实验中,船舶模型的运动根据计算模块输出的仿真结果同步准确显示。
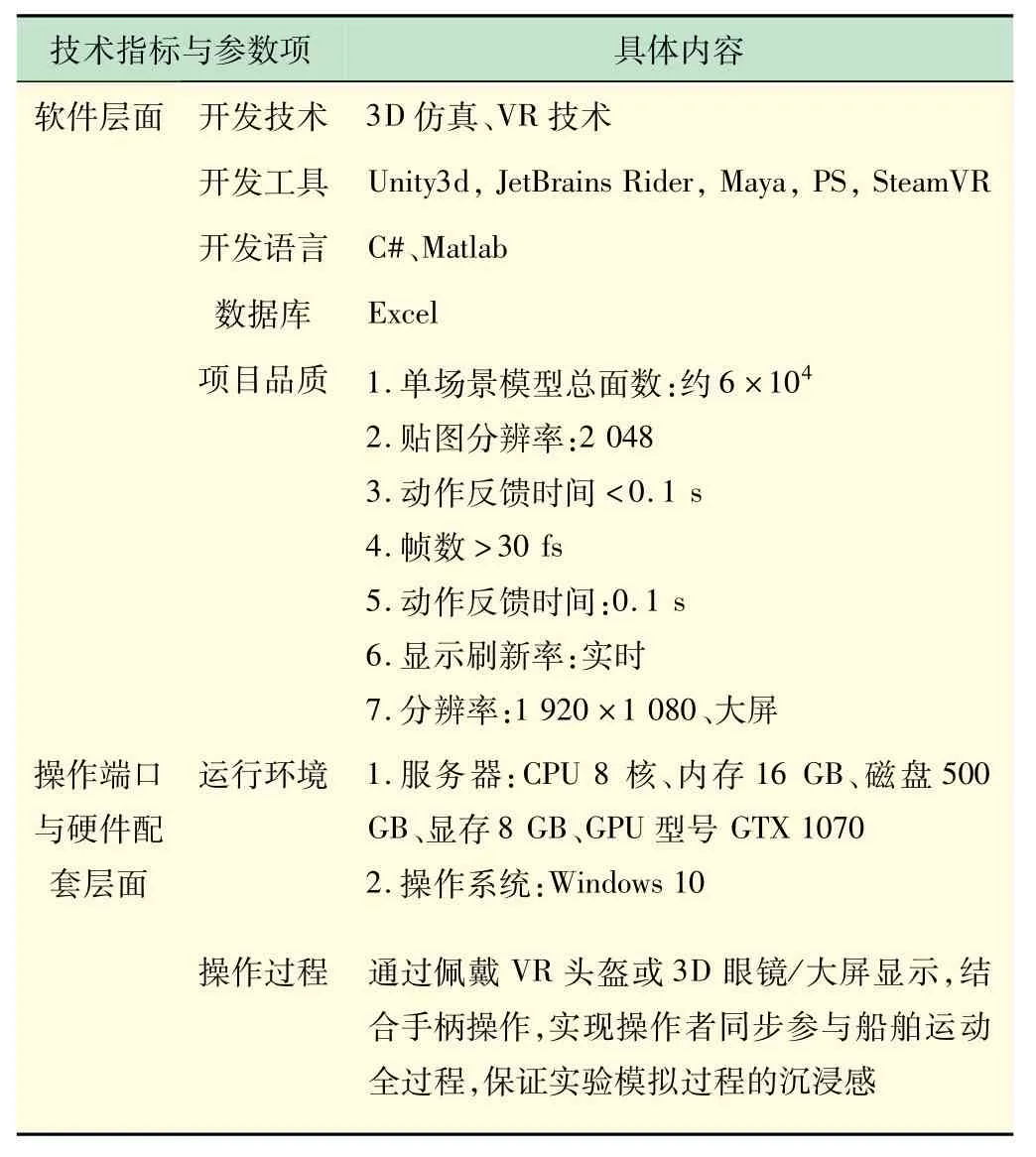
表1 船舶操纵性海试实验虚拟仿真系统参数与关键技术指标
2.2 实验虚拟仿真内容
船舶操纵性海试实验虚拟仿真依托“以虚带实、虚实结合”的教学方法,指导学生在虚拟环境中开展仿真,并与船舶海试结果进行对比分析,达到教学大纲要求。依托多版本的实验系统,船舶操纵性海试实验虚拟仿真教学可按网络授课(线上)和现场授课(线下)的方案分别进行,实验内容主要包括:
(1)实验准备阶段。对ITTC 船舶操纵性相关规程、船舶操纵性预报的常规方法、舵的类型及工作原理、VR基本理论等内容进行集中讲解,使学生对VR技术、船舶操纵性基本理论及海试的相关要求有一定的了解。
(2)实验过程中。学生分组开展实验,在船舶虚拟海试场景仿真界面完成船舶尺度、重量、装载情况、操纵特性参数以及外部条件等的设置后运行,启动系统求解器运算得到船舶虚拟海试的运动轨迹以及螺旋桨转速、前进速度和舵角等相关结果,系统对船舶运动结果进行转换编码,生成相应的控制信号,在VR设备中实现船舶运动全过程的三维模拟输出,完成船舶操纵性海试实验虚拟仿真。
(3)实验完成后。学生通过获得的数据,开展结果分析对比,形成实验报告;仿真过程中同步开展对各项操作环节的评价。
2.3 实验虚拟仿真应用实践
船舶操纵性海试实验虚拟仿真已在集装箱船和超大型油轮等不同船型上得到良好的应用验证。下述以一艘1 000 TEU船满载工况下操纵性海试实验中的回转实验为例,介绍其具体应用情况。
仿真开始,点击进入系统主界面,如图3 所示。点击界面正中模型下方的左右箭头可进行仿真对象船舶的切换,选中对应船舶(以集装箱船为例)。点击界面右下方“参数面板”按钮,弹出页面可输入/修改船舶主尺度、排水量等主要参数,对应输入集装箱船满载工况下的所有参数。
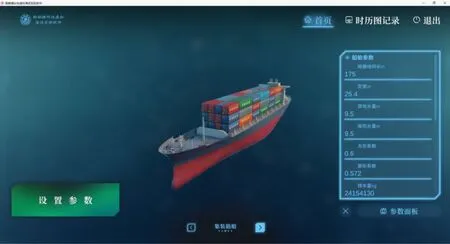
图3 船舶参数设置
点击界面右下方“设置参数按钮”,在界面正中弹出的实验类型选择框中,通过点选左右箭头,选定回转实验(有回转、急停、Z 形等试验可选),并对相应仿真的步长、操舵速度等关键参数进行输入/修改,如图4所示。
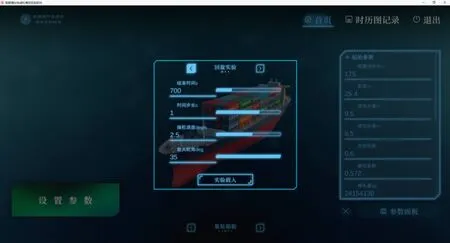
图4 回转实验参数设置
实验类型及对应参数设置完毕后,点击“实验载入”,经数据载入与数据生成,进入海试实验仿真界面,如图5 所示。仿真过程中,通过点选界面左上角菜单中的“天空视角(视角切换)”“时历图”“时间缩放”等,可依次实现视角切换、船舶操纵性关键参数(航迹、艏向角、速度、舵角)时历图实时显示、加速仿真进程等功能,如图6 所示。
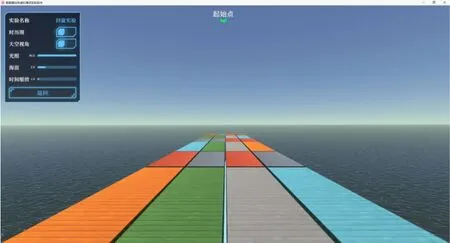
图5 仿真界面
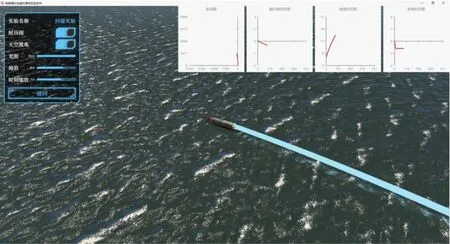
图6 仿真过程与视角切换
仿真结束后点击返回,回到主界面,点击右上角“时历图记录”,进入时历图数据记录条目,可通过点击“另存”对实验数据进行本地保存;也可点击“时历图记录”中的对应实验条目,查看该实验所有“时历图”信息,如图7 所示。
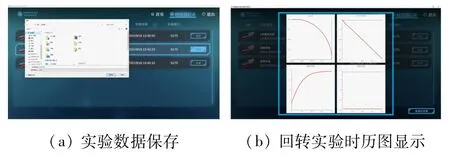
图7 实验数据保存与查看
在回转实验时历图详情界面,点击右下角“查看后处理”,可查看回转实验的后处理数据,包括纵距和回转半径的衡准值,可保存到本地,如图8 所示。

图8 回转实验后处理结果
系统仿真结束后,学生进一步完成数据处理,并形成实验报告。
3 实验虚拟仿真教学特色
船舶操纵性海试实验虚拟仿真以专业教学、科研需求为牵引,结合船舶操纵性计算方法的程序化与三维建模技术、VR技术,采用理论学习与VR 交互操作相融合的教学模式,创新实验方案,还原船舶操纵性海试真实场景,有效实现对传统教学方法的拓展。本实验为学生方便、快捷完成操纵性虚拟海试提供了良好的实验环境,可加深其对操纵性理论与VR 技术应用的认识;通过实验中自主参数设定、互动角色代入等环节的设置,引入合作式、探究式教学新模式,增加实验教学吸引力,提高学生的实践分析能力与学习兴趣。
船舶操纵性海试实验虚拟仿真以培养学生综合能力为目标,通过对学生在实验虚拟操作流程、数据分析和报告完成情况等方面的表现进行多模块综合性评价,实现对常规实验教学项目评价体系的优化;鼓励学生通过实操加深对船舶操纵原理及VR 理论的认识,以实验报告形式考核学生的综合数据分析能力,加强其对船舶专业知识的掌握,同时促进船舶与计算机专业间学科交叉知识体系的建立,使学生的理论知识、动手能力与综合素质得到同步提升。
4 结 语
本文基于船舶操纵性海试基本规程,引入VR 技术、3D成像投影技术等,开展船舶操纵性海试虚拟仿真实验设计探索与应用研究,自主开发实验系统、形成完善的虚仿实验教学方案,实现操作者沉浸式开展船舶操纵性海试实验,使其深入掌握船舶操纵性海试规程与实践操作要求,熟悉船舶操纵性海试结果分析方法;有效规避船舶海试在教学实验中难以实现的不足,为操作者逐步建立整船概念、理解船舶操纵性基本原理与分析方法提供了良好的虚拟仿真教学环境,也为深入推进VR技术在工程领域实验教学中的应用奠定研究基础。
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
小哥白尼(趣味科学)(2019年6期)2019-10-10
船舶标准化工程师(2019年4期)2019-07-24
军工文化(2019年12期)2019-03-31
环球时报(2017-11-09)2017-11-09
船舶经济贸易(2017年8期)2017-08-30
中国船检(2017年3期)2017-05-18
发明与创新(2016年38期)2016-08-22