紧凑型地波雷达目标检测跟踪一体化实验平台
2024-05-15 13:22孙伟峰李小彤
实验室研究与探索 2024年3期
孙伟峰,李小彤
(中国石油大学(华东)海洋与空间信息学院,山东青岛 266580)
0 引言
高频地波雷达(High-Frequency Surface Wave Radar,HFSWR)是一种工作在高频波段(3~30 MHz)的新体制超视距雷达,可用于海洋动力环境监测和海上运动目标探测[1]。大型阵列式地波雷达系统目标探测性能好,但其占地面积大,选址、部署及维护受到限制[2]。因此,小型化发射机、接收机及接收天线阵列的紧凑型地波雷达成为一种发展趋势[3]。
大型阵列式地波雷达在目标探测时通常采用先检测后跟踪方法,如图1 所示。雷达回波经信号处理后形成距离-多普勒(Range-Doppler,R-D)谱,检测器对R-D谱进行检测得到目标距离和多普勒速度,经测向后生成目标点迹;跟踪器对检测器输出的点迹序列进行跟踪得到目标航迹。在这种机制下,检测器与跟踪器之间的信息传递是单向的,目标检测输出点迹的质量直接影响目标跟踪效果。此外,雷达获取的跟踪信息没有得到合理的反馈和利用。

图1 先检测后跟踪方法流程框图
紧凑型地波雷达天线阵列孔径小、发射功率低,导致目标回波信噪比(Signal to Noise Ratio,SNR)低,应用传统的先检测后跟踪方法难以保证其探测性能。为减少因信息利用不充分造成的雷达目标探测损失,国内外专家学者主要提出了两类解决方法:一是跟踪信息辅助的目标检测方法[4-5],将跟踪过程中获得的目标位置、航速航向等信息反馈至检测器,作为目标检测的先验信息优化检测参数。此类方法对航迹起始后的每一帧数据均进行跟踪、信息反馈和检测门限调整,存在计算量大、虚警率高的问题。二是目标特征辅助的点迹-航迹关联方法[6-7],利用回波幅度、SNR等目标特征辅助点迹-航迹关联,解决密集杂波环境或多目标场景下的点迹-航迹关联错误问题。紧凑型地波雷达工作环境复杂、目标运动特性多变,上述特征容易随目标姿态和杂波环境的变化随机起伏。
针对紧凑型地波雷达在目标探测过程中存在的目标量测易丢失、真假目标难辨、航迹易断裂等问题,提出适用的紧凑型地波雷达目标检测跟踪一体化方法。针对弱目标漏检导致量测点迹丢失而发生航迹断裂的问题,提出结合目标预测状态的弱目标自适应检测方法。针对密集杂波环境下因虚假点迹干扰导致点迹-航迹关联错误的问题,提出点迹质量指标辅助的点迹-航迹关联方法。针对上述工作,设计开发了紧凑型地波雷达目标检测跟踪一体化实验平台,利用实测数据开展目标检测与跟踪实验,实验结果表明了所提方法的有效性。平台可用作高校学生开展创新实践的教学实验平台[8-10],加深学生对雷达目标跟踪原理的直观理解。
1 紧凑型地波雷达目标检测跟踪一体化方法的原理与流程
由图1 可见,传统的先检测后跟踪方法,检测器无法利用已有的目标跟踪信息改善检测性能,跟踪器忽略了目标特征和检测环境信息在跟踪过程中的指导作用。提出一种紧凑型地波雷达目标检测跟踪一体化方法,主要包括结合目标预测状态的弱目标自适应检测和点迹质量指标辅助的点迹-航迹关联方法,如图2 所示。利用上述两个环节,形成检测器与跟踪器之间信息传递的闭环回路。
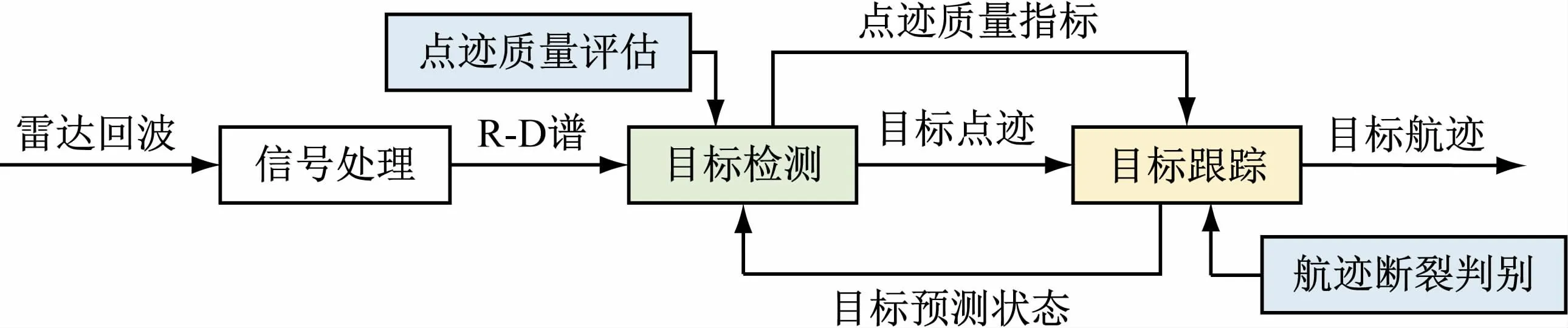
图2 目标检测跟踪一体化流程框图
1.1 结合目标预测状态的弱目标自适应检测方法
目标检测的目的是在复杂的回波信号中提取微弱的目标信息[11],通常采用恒虚警(Constant False Alarm Rate,CFAR)检测技术[12]。相较于大型阵列式地波雷达,紧凑型地波雷达目标回波SNR 较低,在目标检测过程中容易发生弱目标漏检,导致在跟踪过程中目标航迹连续多个时刻关联不到量测点迹,发生航迹断裂。
针对上述问题,提出结合目标预测状态的弱目标自适应检测方法。在跟踪器内设置判别器,用于监测航迹维持状态。若某目标航迹在t时刻因量测点迹丢失发生断裂,将其 在t+1 时刻的目标预测状态st+1=[vt+1,rt+1,at+1]T反馈至检测器,其中,vt+1、rt+1和at+1分别为该目标在t+1 时刻的多普勒速度、与雷达之间的距离和相对于雷达的方位角。
检测器接收到反馈的目标预测状态后,在t+1 时刻的R-D谱中,以(vt+1,rt+1)为中心建立二维局部检测波门,用于表示弱目标发生漏检的可能区域。其中,局部检测波门的大小由雷达对目标多普勒速度和距离的测量误差决定。通过对局部检测波门内的检测门限进行自适应调整,可重新检测到漏检的弱目标。由于不同检测背景下弱目标发生漏检的原因通常不同,在进行检测门限自适应调整前,需要判断检测背景的类型。
目标检测背景可分为均匀和非均匀杂波背景,均匀杂波背景中通常只包含雷达感兴趣的目标信号,非均匀杂波背景中可能还存在强杂波和邻近目标信号。当某目标航迹发生断裂时,说明航迹在维持过程中无量测点迹进行关联,其对应的局部检测波门内可能存在强杂波或邻近目标生成的干扰点迹,此类点迹因方位角不符合点迹-航迹关联波门的要求而无法参与航迹更新,对局部检测波门内检测门限的估计造成了干扰。利用局部检测波门内的干噪比(Interference to Noise Ratio,INR),可对目标检测背景进行判断。
式中:AI、AN分别为局部检测波门内初次目标检测获得的干扰点迹和正常杂噪采样的平均幅度值。利用局部检测波门内的检测背景类型进行自适应判决
式中:B为INR的预设阈值。
针对均匀和非均匀杂波背景,分别采用梯度下降法和EKI-CFAR检测器对局部检测波门内的检测门限进行自适应调整[13],重新检测波门内的漏检目标,经测向后输入跟踪器,对已断裂的航迹进行更新。
若应用上述方法仍未检测出符合条件的量测点迹与目标航迹进行关联,则使用目标预测状态对航迹进行更新。当目标航迹在连续多个时刻内均无法关联到量测点迹时,即可宣告该目标航迹终结。此方法能有效增加雷达对弱目标的检测概率,提高目标跟踪连续性。
1.2 点迹质量指标辅助的点迹-航迹关联方法
受发射功率低、波束宽度大的影响,紧凑型地波雷达在进行目标探测时容易受杂波和噪声干扰[14],导致目标回波SNR低,在密集杂波环境下容易产生大量虚假点迹。在点迹-航迹关联过程中,目标航迹受虚假点迹干扰难以关联到匹配的量测点迹,逐渐偏离正确的行驶方向,最终发生断裂。如何辨别目标检测获得的点迹,提高点迹-航迹关联过程中真实目标和虚假点迹的区分度,是紧凑型地波雷达目标跟踪领域面临的关键问题之一。
检测器在目标检测过程中通常仅提取点迹的距离、多普勒速度、方位角等参数,密集杂波环境下仅依靠此类特征难以对来源于目标、杂波和噪声的点迹进行有效区分。可从点迹质量评估的角度出发,利用不同点迹的回波幅度在R-D 谱中的形态和位置差异,提取并融合点迹的多方向梯度、局部方差和点迹位置概率等特征,对点迹质量进行综合评估。在点迹-航迹关联波门内,利用点迹质量指标辅助提高目标航迹关联到点迹的概率。雷达回波数据经信号处理后形成R-D谱,如图3 所示。
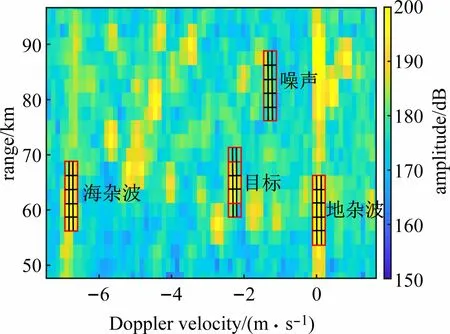
图3 某紧凑型地波雷达实测R-D谱
根据雷达的距离和多普勒速度分辨率可将R-D谱划分为多个单元格,图中颜色的深浅代表单元格内信号幅度的高低。由于目标、杂波和噪声的回波幅度、距离、多普勒速度不同,会在R-D 谱呈现出不同的形态和位置特征。在CFAR 检测过程中,若某待检测单元内的幅度值超过CFAR 检测门限并通过峰值检测[15],说明该单元格内可能包含目标信息,此时,分别提取该单元格内的幅度值对应的多方向梯度MG、局部方差MV和点迹位置概率MP,将这3 个特征加权融合,获得最终的点迹质量指标
式中,EG、EV、EP分别为上述3 个特征在点迹质量评估过程中所占的权重,可利用实测数据进行多次正交试验以确定最优的权值组合。计算每一帧R-D 谱所有目标点的质量指标,经测向后输出点迹数据。M值越大,表示该点迹来源于真实目标的可能性越大。
经点迹质量评估后,大部分目标点会获得比杂波和噪声点更高的点迹质量指标。在将点迹数据输入跟踪器前,部分点迹质量过低的虚假点迹会被滤除,以减轻后续跟踪算法的处理负担。在密集杂波环境下,目标点迹和杂波、噪声生成的虚假点迹通常具有相似的运动学参数,容易造成点迹-航迹关联模糊。
如图4 构造的跟踪场景,该目标航迹在t+1 时刻的关联波门内包含2 个量测点迹,其中:量测点迹1 为该目标在t+1 时刻的量测点迹;量测点迹2 为杂波生成的虚假点迹,它们的关联代价和点迹质量指标分别为c1、c2和M1、M2,且满足c2<c1,M2≪M1。此时,若采用最小关联代价准则进行数据关联,会发生点迹-航迹关联错误。
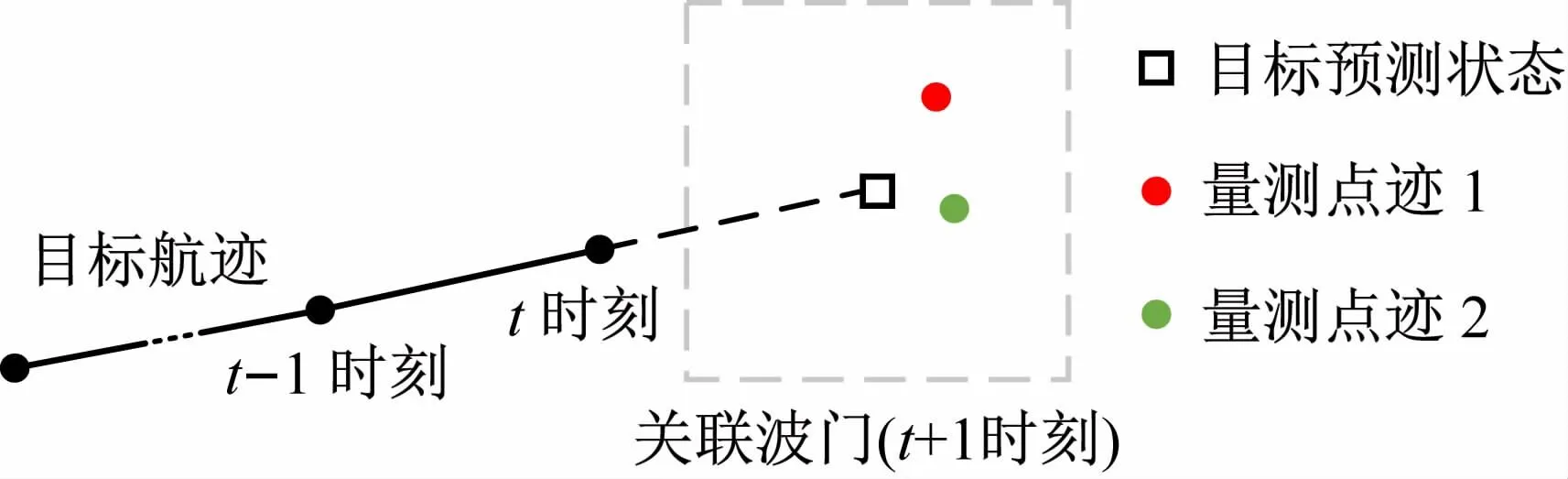
图4 目标点迹-航迹关联过程示意
在这种情况下,点迹质量指标M可作为辅助特征,提高目标和虚假点迹的区分度。当关联波门内2个量测点迹的关联代价之差满足
式中:c1、c2分别为2 个量测点迹与目标航迹之间的关联代价;e为关联代价之差的预设阈值。此时,优先选取点迹质量指标M更高的量测点迹对目标航迹进行更新。
2 紧凑型地波雷达目标检测跟踪一体化实验平台的设计与实现
根据上述研究,利用Matlab R2018b 设计并实现紧凑型地波雷达目标检测跟踪一体化实验平台,便于设置目标探测过程中的各项参数、展示实测数据的目标检测与跟踪结果,并可视化目标检测跟踪一体化的运行过程。
2.1 功能需求分析
设计实验平台的主要目标是利用检测跟踪一体化实现紧凑型地波雷达对海上运动目标的探测,实时输出可靠性、稳定性较高的目标航迹。平台需要包含目标检测和目标跟踪模块,此外,还应该包含航迹个例分析模块,用于动态演示目标检测跟踪一体化的过程。平台架构如图5 所示。
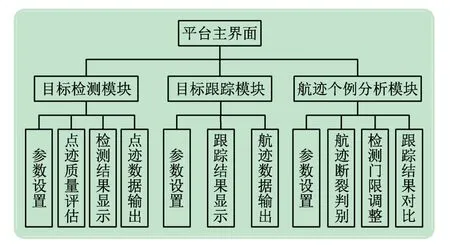
图5 实验平台功能模块构成
2.2 平台界面与功能模块设计
目标检测模块负责对波束R-D 谱进行检测,并显示检测结果,同时在检测过程中完成点迹质量评估,输出含点迹质量指标的点迹数据集合,其界面设计如图6 所示。
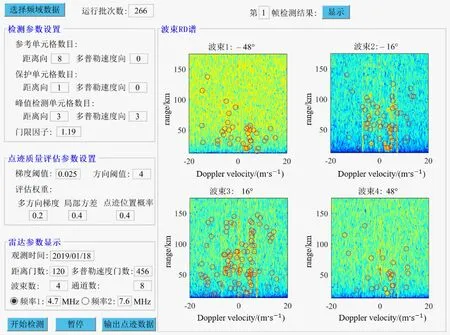
图6 目标检测模块界面
目标跟踪模块负责对目标检测模块输出的点迹数据进行跟踪,并显示跟踪得到的目标航迹,界面设计如图7 所示。其中,点迹数据中的点迹质量指标用于辅助提高点迹-航迹关联准确性,当某条处于维持状态的航迹发生断裂时,检测器会针对该目标重新启动局部检测波门内的弱目标检测。
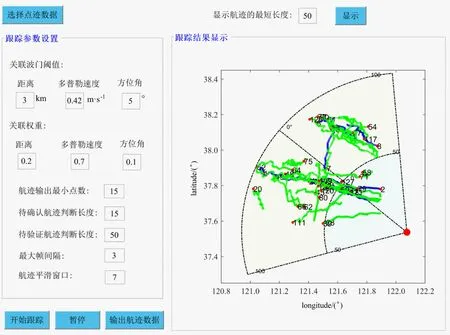
图7 目标跟踪模块界面
为使目标检测跟踪一体化的运行过程可视化,设计了航迹个例分析模块。如图8 所示,输入关注目标的航迹编号,可查看跟踪器内判别器的监测情况和航迹跟踪时长的动态变化以及检测器内局部检测波门的建立和检测门限的自适应调整过程。此外,可通过修改实验参数对不同参数值对应的跟踪结果进行对比,以便确定最优的实验参数组合。
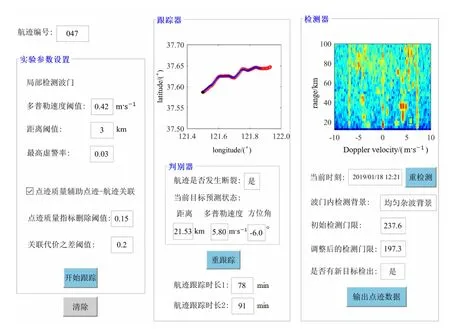
图8 航迹个例分析模块界面
3 目标检测与跟踪实验及结果分析
为进一步验证所提方法的有效性,利用紧凑型地波雷达实测数据开展目标检测与跟踪实验,对传统先检测后跟踪方法和所提检测跟踪一体化方法的航迹跟踪结果进行对比。实验数据由课题组研制的CORMS(Compact Over-the-horizon Radar for Maritime Surveillance)系统于2019 年1 月18 日11:04~15:29获取。
在先检测后跟踪方法的航迹跟踪结果中选取了2个典型的错误跟踪个例,分别存在航迹断裂和航迹误跟踪的问题,利用所提方法重新进行跟踪,发现跟踪结果均得到了明显改善。图9、10 对2 种方法的跟踪结果进行了对比,其中,蓝色和红色航迹分别为先检测后跟踪方法和所提方法的跟踪结果,黑色实心圆点表示航迹起始点。对2 个错误跟踪个例展开具体介绍。
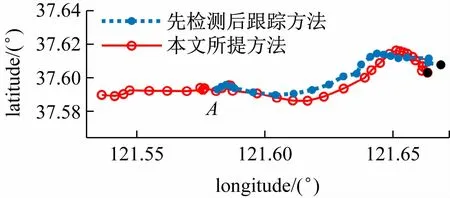
图9 目标个例1跟踪结果对比
(1)航迹断裂个例。应用先检测后跟踪方法对图9 所示的目标个例1 进行跟踪,发现航迹在A 点处发生断裂。经分析,航迹断裂的原因为目标受海杂波遮蔽而导致漏检、量测点迹丢失。目标航迹在该时刻错误关联了海杂波生成的虚假点迹,后续无量测点迹进行关联而发生断裂。应用所提方法重新进行跟踪时,航迹跟踪时长延长了10 min。
(2)航迹误跟踪个例。如图10 所示,应用先检测后跟踪方法对目标个例2 进行跟踪时出现航迹回退折返现象,不符合海上船只目标的运动规律。经分析,该目标航迹在B点处错误关联了噪声生成的虚假点迹,造成虚假航迹的延续。应用所提方法重新进行跟踪后,解决了航迹误跟踪问题,且航迹在C 点处终结,此时目标距离雷达较远,即将驶出雷达的有效探测范围,在航迹断裂处重新进行目标检测仍无法检测到弱目标,说明可以宣告航迹终结,避免了系统资源的浪费。
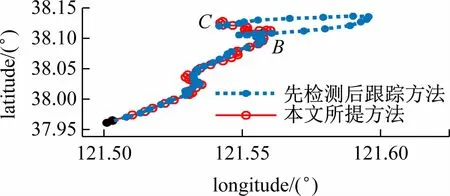
图10 目标个例2跟踪结果对比
通过分析上述2 个目标个例发现,所提方法的目标探测性能远优于经典的先检测后跟踪方法,可改善因量测点迹丢失、虚假点迹干扰导致的航迹断裂、航迹误跟踪等问题。经计算,应用先检测后跟踪方法对该批数据进行跟踪时,平均航迹跟踪时长为55.05 min。与之相比,所提方法跟踪得到的平均航迹跟踪时长为72.57 min,增加了17.52 min。
4 结语
紧凑型地波雷达目标探测存在目标回波SNR低、杂波和噪声干扰严重等不利因素,用先检测后跟踪方法难以保证目标的检测与跟踪性能。文中所提紧凑型地波雷达目标检测跟踪一体化方法,在检测器与跟踪器之间建立了信息动态交互机制,充分利用雷达探测所得的多种目标信息优化检测与跟踪参数,整体改善了紧凑型地波雷达的目标探测性能。实验结果表明,与先检测后跟踪方法相比,所提方法得到的平均航迹跟踪时长增加了17.52 min,错误跟踪现象明显减少。此外,开发紧凑型地波雷达目标检测跟踪一体化实验平台,通过多次目标探测实验,证明了平台在工程应用中的可靠性和稳定性。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
中学物理·高中(2021年3期)2021-06-06
青年歌声(2019年12期)2019-12-17
火控雷达技术(2019年1期)2019-04-11
电子技术与软件工程(2018年9期)2018-02-25
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
舰船科学技术(2015年8期)2015-02-27