
浅谈无人驾驶清舱机避障功能
2024-05-13 06:05符俊王博强
中国设备工程 2024年9期
符俊,王博强
(国能常州发电有限责任公司,江苏 常州 213000)
清舱机无人驾驶技术的应用具有重要意义。通过传感器、智能算法等,可以实现自主导航、智能避障等功能。传感器可以感知周围环境,包括船舱内物体的位置和状态,以及与船舱内人员和其他设备的交互信息。通过智能算法的处理和判断,无人驾驶清舱机可以准确快速地完成清舱任务,提高工作效率,并且降低了人为操作可能引起的意外风险。因此,本文就全自动无人驾驶清舱机安全性、安全措施和方法进行阐述。分开来说,即卸料设备与运输设备的避障、多种卸料设备之间的融合、多种卸料设备之间的互锁、人员与设备的互锁。
1 清舱机与卸船机的安全互锁和融合
为了确保船舱余料清舱作业的安全性和高效性,清舱机与卸船机之间需要进行安全互锁和融合。安全互锁是指两台设备之间的联动控制,只有在特定条件下才能进行操作,以避免可能的事故和损坏。
当卸船机开始卸载散料时,清舱机应自动停止工作,并等待卸船机完成后再继续操作,抑或清舱机在避开卸船机作业半径区域进行清舱工作。其位置互锁程序保护、传感器直接检测保护等两种及以上的防碰撞保护手段,避免发生碰撞事故。
此外,卸船机和清舱机的融合也是提高作业效率的关键。通过优化设备之间的协同工作,可以减少作业时间和人力成本。例如,清舱机可以根据卸船机的卸载速度和位置,智能调整自身的工作节奏和路径,以最大程度地减少等待时间和重复移动。
具体措施如下。
1.1 位置互锁功能-软件计算检测防碰撞
系统通过建立舱内的XOY坐标平面并进行网格化,能够实现以下功能:卸船机抓斗和清舱机在进入相邻网格的危险阈值范围内时,结合卸船机抓斗的高度数据,及时停止运行,以确保安全。
1.2 直接传感器检测互锁功能-雷达相向扫描检测防碰撞
为了防止碰撞发生,卸船机部署了3D雷达来进行下方的扫描,以实时检测清舱机的位置;同时,清舱机在顶部也部署了仰角可调的3D雷达,用于上方的扫描,以实时检测抓斗的位置;一旦卸船机抓斗与清舱机的距离进入危险阈值范围,系统会立即停止运行。
1.3 分区域作业规划
为了提高清舱效率,系统需要设计一个合理的作业流程,使卸船机抓斗和清舱机的作业能够高效协调。
在清舱机与卸船机抓斗交叉作业时,应遵循以下规则:(1)分区域作业:将作业区域划分,确定卸船机抓斗和清舱机的作业范围和顺序;(2)就近取料:根据就近原则,选择离取料点更近的卸船机抓斗来进行作业;(3)两点供料:根据需要,在两个指定的地点进行供料。
对于舱内自动作业,清舱机需要遵循以下局部轨迹规划:(1)分析舱内剩余料堆的分布和特点;(2)将整个清舱作业拆分成多个单次任务,通过推料或耙料路径的最优曲线来达到效率最优的作业结果;(3)结合推、耙、铲、装等动作,实现各种动作的协调进行。
综上所述,清舱机与卸船机的安全互锁和融合是确保船舱余料清舱作业顺利进行的重要因素。通过有效的联动控制和协同工作,可以提高作业效率、降低风险,并实现更加安全可靠的清舱作业。
2 清舱机与船舱舱壁的避障
清舱机与船舱舱壁的避障是确保清舱作业顺利进行的关键。为了避免清舱机与舱壁之间的碰撞,需要采用先进的避障技术。一种常见的方法是使用激光或雷达传感器,通过扫描周围环境来检测障碍物的存在和位置。清舱机可以根据传感器提供的信息,实时调整自身的路径和速度,以避开障碍物。
另外,还可以结合计算机视觉技术,通过摄像头等设备获取图像信息,并利用图像处理算法识别舱壁的位置和形状。清舱机可以根据这些信息进行路径规划,以便在接近舱壁时及时调整方向,避免与舱壁发生碰撞。
除了传感器和计算机视觉技术,还可以利用机器学习算法,让清舱机不断学习和优化避障策略。通过分析历史数据和实时感知,清舱机可以逐渐提高避障的准确性和效率,从而更好地应对复杂的工作环境。
关键技术点:实现船舱半密闭空间环境识别及3D重建。
对于船舱内的半密闭空间,要实现清舱机的远程控制功能,首先,需要对舱内空间环境进行识别和3D重建。系统采用了3D激光雷达作为清舱机的扫描设备。然而,在船舱内粉尘浓度高、煤炭潮气大,甚至在雨雾天气等恶劣环境中,粉尘颗粒、雾滴和水滴会对激光雷达的测量结果造成干扰。为了解决这个问题,系统采用了先进的数据处理算法,将这些干扰降低到最低程度,并且将微小粒子的影响“忽略”,准确描绘出船舱和料堆的真实轮廓。
要实现船舱半密闭空间环境识别及3D重建,关键在于有效滤波技术,以应对粉尘等干扰因素。系统能够通过这一技术,准确地识别出船舱内部的环境信息,并将其转化为3D模型。这一创新点使得清舱机能够更加精确地进行清理工作,提高工作效率和质量。同时,通过滤波技术的应用,还可以进一步优化系统性能,提升对复杂环境的适应能力。
随着技术的发展,船舱半密闭空间环境识别及3D重建技术的研发改进,不断推动清舱机的发展,为清舱工作提供更高效、更精准的解决方案。
综上所述,清舱机与船舱舱壁的避障技术是保证清舱作业安全顺利进行的关键因素。通过使用传感器、计算机视觉技术和机器学习算法,清舱机可以有效地避免与舱壁碰撞,提高工作效率和安全性(图1)。

图1 船舱内3D建模
3 清舱机与人的安全互锁和避让措施
建设远程实景控制中心是一项严谨务实的任务,实现无人驾驶的同时,也能使操作人员更直观的感觉置身现场,顺利地完成清舱工作。
首先,需要在中控室建设一个远程控制中心的软硬件平台。通过这个平台,可以控制卸船流程中的各项设备,如抓斗卸船机和清舱机等。同时,还需要设计一个数据通信接口,将远程控制中心和原有的输煤程控中心连接起来,以确保卸船机、清舱机和输料系统设备之间的联锁和控制融合。
其次,需要建设一个具备驾驶舱功能的远程控制中心。这个驾驶舱需要集成无线AP、底层控制器(如摇杆、按钮等直接控制端)和主控单元等重要组件。驾驶舱能够显示清舱机的第一视角实时视频和舱内环境,还可以显示作业轨迹、360度全景环视影像等内容,从而实现沉浸式的远程控制驾驶功能。远程实景控制中心搭建的关键技术和创新点体现在视频数据传输的连续性、控制数据传输的可靠性和低延迟性方面。为了保证视频数据的连续性,在搭建中会采用先进的传输技术;为了确保控制数据的可靠性和低延迟性,使用先进的控制技术。只有这样,才能成功实现远程实景控制中心的搭建,为各项工作提供有效的支持。
无人驾驶清舱机在与人员共同工作时,必须确保安全互锁和避让措施的实施。首先,清舱机配备高精度传感器和智能识别系统,能够及时发现人员的存在并进行识别。其次,清舱机需要与人员之间建立有效的通信系统,以便及时传达指令和信息。在清舱作业过程中,如果有人员进入工作区域,清舱机应立即停止运行,并发出警示信号,以确保人员的安全。此外,清舱机还应具备灵敏的避让能力,能够根据环境变化迅速调整路径,避免与人员发生碰撞。通过这些安全互锁和避让措施的实施,可以最大程度地保障人员在清舱作业中的安全(图2)。
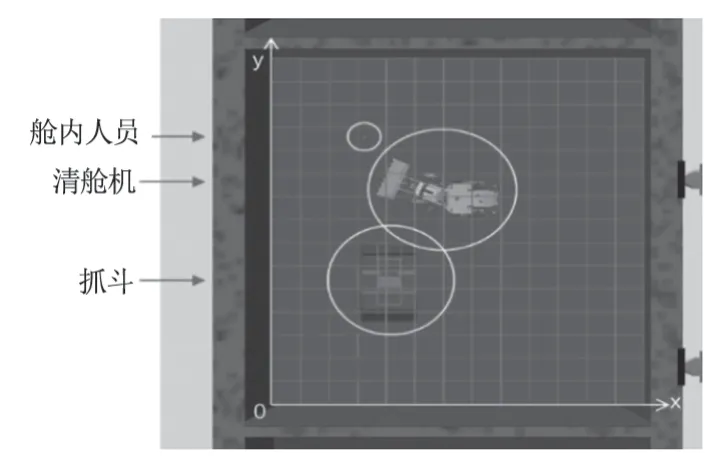
图2 人、卸船机、清舱机三点位置
4 结语
无人驾驶清舱机的设计和功能提供了一种高效、安全的解决方案,用于处理船舱余料清舱作业。通过与卸船机的安全互锁和融合,可以实现作业过程的顺畅进行,避免可能的事故和损失。同时,清舱机配备了先进的避障技术,能够准确识别船舱舱壁等障碍物,以避免碰撞和损坏。此外,清舱机还采取了安全互锁和避让措施,确保与人员的安全交互,避免潜在的伤害风险。综上所述,无人驾驶全自动绿色清舱机是一项具有广阔应用前景的技术创新,将为船舱余料清舱作业带来更高效、更安全的解决方案。
猜你喜欢
军事文摘(2022年20期)2023-01-10
舰船科学技术(2022年21期)2022-12-12
作文小学中年级(2022年9期)2022-09-08
英语文摘(2021年11期)2021-12-31
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
阅读(快乐英语高年级)(2019年2期)2019-09-10
学生天地(2018年19期)2018-09-07
船海工程(2015年4期)2016-01-05
焊接(2015年12期)2015-07-18
