保护性耕作农机作业监测技术应用的必要性及策略探析
2024-04-29 05:59张秋伟
农民致富之友 2024年2期
张秋伟


保护性耕作活动,能够保持田间生产的生态性,激活其经济运作能力,有效协调社会各项工作,更是当前保护土地资源的低成本、高效性措施。在多年研究实践中,此种保护性耕作方法,逐步推广到各个地区,侧重发展秸秆覆盖生产、自动播种生产等先进技术。在新型技术推广融合期间,有效融合监督考评、先进技术等有效措施,提供更精确、更完整的监管资料,以此保证田间生产监测质量,积极展现监管服务作用。
一、保护型田间生产的监测设施
1、实践应用
保护型田间生产监测设施主要是利用机器视觉识别技术以及与之配套的算法体系,在预先输入的专业知识的引导与规范下,实现对耕作地块秸秆覆盖率的高精度识别与计算。不仅如此,保护型田间生产监测设备还结合GIS技术与AI算法,提升对作业数据的收集效率以及分析计算的准确性,并对集群架构作出优化与升级,采用分布式结构,提升架构的整体弹性,保障其对多元化业务的适应性,为业务的稳定运行与创新打好基础。总的来说,保护型田间生产监测设施在作业数据监测方面具备突出优势,能够精确计算播种面积,以此避免漏播、重播等问题的出现。保护型田间生产监测设施在实践应用中还可以获取农机的运行信息与具体位置,以便对农机作出科学合理的规划。
例如,某单位建立了智能播种监控平台,投用在多个地区,能够有效反馈田间作业生产情况,及时发现播种遗漏、重复播种等各类问题。在传感器反馈的数据中,动态反馈农机生产的具体方位,准确掌握农机生产情况,有效排查设备故障问题,平台监测效果较好。在2022年实际监测中,成功发现22次漏播、12次重播问题,为精确农耕生产提供了有效数据。
2、技术问题
正如上文所说,尽管保护型田间生产监测设施在技术层面具备诸多优势,在推广应用过程中有着突出的表现与良好的口碑,但基于技术人员的现场记录与用户的实际反馈,可以发现保护型田间生产监测设施还存在以下需要改进的问题。第一,是缺乏统一标准,不同地区由于其作物的种植情况与地理条件不同,选择的秸秆还田的方式也会有所不同,整秆覆盖、粉碎覆盖、留根茬覆盖等不仅标准不同,需要关注的要点也不同。这也导致不同保护型田间生产监测设施的系统之间的兼容性较差,阻碍保护型田间生产监测的顺利进行,提升其工作难度。第二,是秸秆本身就具备流动性的特点,本身质量与密度就相对较轻,容易受到环境因素的负面影响。比如风沙就有可能导致秸秆被吹走或覆盖,导致秸秆覆盖度的计算出现误差。第三,保护型田间生产监测设施在夜间监测方面还存在较为明显的性能差距,由于夜间缺乏自然采光,因此生成的作业图像常常出现分辨率不足,色彩细节丢失严重的问题,导致秸秆覆盖率的识别出现问题。
3、改善对策
首先,为改善保护型田间生产监测设施中存在的诸多问题,相关技术人员需要持续将精力投入到高性能、低成本作业监测设备的研发之中。影响到先进技术在生产应用中推广的重要原因之一就是环境差异,实验室中构建的是相对理想化的运行环境,设备的性能自然能够得到充分发挥,而在实际的生产环境中,高温、高湿度、多尘土等问题都会对保护性耕作农机作业监测技术的稳定运行造成影响,导致误判等问题的出现。因此相关技术人员需要强化传感器的性能,提升其穿透力与抗干扰能力,并通过构建产品试验检测平台的方式降低设备的研发成本。其次,相关技术人员还需要提升保护型田间生产监测设施的兼容性。目前保护型田间生产监测设施的种类繁多,针对性较强,在表现突出的同时也导致其适用范围狭小,难以匹配多类型的作业任务。因此相关技术人员需要推动保护型田间生产监测设施向着多元参数、实时计算的方向发展,提升其通用化水平。
二、各类保护型田间生产的监测分析
1、秸秆覆盖率
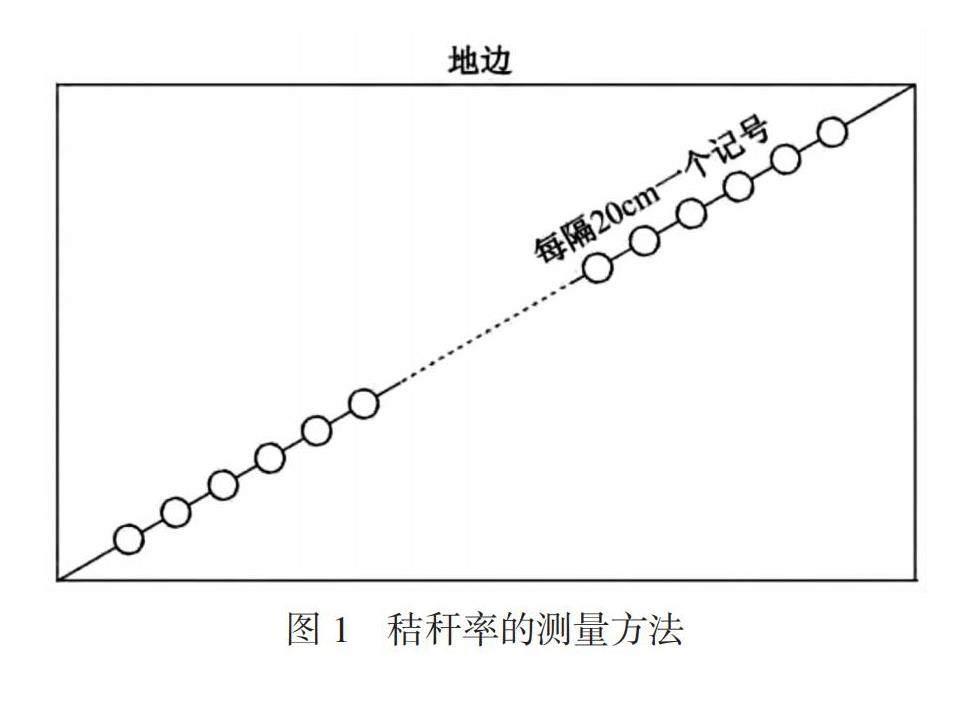
①人工监测法。参照农业相关单位给出的监测要求,在测定田间地表秸秆覆盖程度时,选择测量的绳子长度大于50m且不超过100m。绳子长度间隔20m的位置,画出一个记号。测量中,以每个田间地块对角位置为目标,逐一放置测量绳,记录秸秆个数x,用x除以标记总数y,得出x与y的比值,作为秸秆覆盖率。测定验收时,以各组地块为测量单位,随机选择5个方向,重新测量,获取5组测量结果的平均数,用作验收数据。测量方法,如图1所示。
②线上监测法。上述是人工测量秸秆占比的方法,以下是自动测量方法。农机参与田间生产期间,汇总的秸秆图像面临部分干扰因素,间接降低了处理算法的精确性。干扰因素具体包括:图像采集期间,光照亮度不均,部分地段的土壤、秸秆具有颜色相似性,增加了秸秆目标与土壤背景的甄别难度。当秸秆粗细程度有差异、秸秆部分稀疏性不同时,在土壤颜色相似、土壤反光等情况下,会出现识别偏差问题。应对自动测量形成的技术问题,尝试采取彩色分量测量技术,有效划分识别主体与土壤。采取灰度化处理方法,有效区分秸秆与土壤的颜色,再用最新的Bernsen算法,给予赋值处理。新算法中,有效融合了高斯算子,以此提高了图像对部分噪声信号的对抗性,有效排除光照不均形成的不利作用。
如表1所示,是灰度处理效果。
结合像素对比发现:新算法具有较强的图像处理能力,能够有效排除噪声干扰性。在秸秆检测算法中,能够有效提高图像像素,清晰区分秸秆与土壤。在新的算法中,使用h(x,y)表示高斯处理得到的结果。利用线上平台,获取h(x,y)各组像素值的最大、最小两个取值方案,计算两组数据的平均值,将此结果标记为T。线上平台测量秸秆覆盖率的算法,具体如式a:
a式中,J表示线上平台测得的秸秆覆盖程度,%;n表示当灰度取值为1的像素数量,个;N表示采集田间生产图像的数量总和,个。使用新算法与人工测量法,分别测定某块田地的秸秆覆盖程度,新算法的测得结果为46.78%,人工法测得结果为48.12%,新算法测得结果与人工测定法的偏差量为1.34%,测量精确性较高。
③监测分析。从20%至90%各类秸秆覆盖程度的图片中,随机抽选100张图,每间隔10%取10张图,进行秸秆率监测分析。监测结果如表2所示。
结合实践监测发现:新算法用于秸秆程度监测中,相比人工法的误差小。在20%至90%的秸秆程度范围内,新算法监测结果与实际的偏差量不超过1%,监测结果具有较高的可信性。在50%至80%范围内,新算法测得的秸秆程度,相比实际情况的偏差能够控制在0.5%左右,相比其他范围的监测精确程度更高,表现出较强的技术先进性,可用于秸秆程度的监测工作,以此全面监测保护性田间生产农机的运行情况。
2、免耕精量播种
①免耕播种监测技术的类型。测定免耕精量播种数量的技术方法,具体有机械监测、机电监测、电监测三种类型。其中,机械监测技术是使用各类机械元件,综合判断播种设备的性能,排查其可能存在的故障问题,采取光电形式反馈故障结果,给予相应的故障警报。此种监测方法,无法直观反馈播种过程,不能判定故障类型。在传感设备的广泛推广视域下,机械式、机电式两种监测方法,逐渐退出监测平台。电子监测方法逐渐成为主要应用,有效融合传感设备,开发极具智能性的播种监测平台。当前,电子监测平台共有多种技术形式,具体包括:光电式、视觉表达式等。
②光电感应。此种播种监测技术,是借助光感应元件有效采集遮光区的播种情况,有效改变光信号,以电信号形式输出监测结果。第一,温度光电监测技术:是利用黑体辐射思想,借助其多种测温方式,完成温度监测。此种检测技术的使用优势:当被测区域物体遮光范围较大时,测温结果不会受到干扰;在环境较差的情况下,此监测技术表现出较强的技术适用性;成本不高、可用时间较长、监测成本不大。第二,光照强度监测技术:是借助光电效应的理论内容,无须分析测量物体,有效改变光照强度参数,输出结果为电压数据格式。再进行单位转化,最终以0-2V、4-20mA的数据形式,传送至数据分析平台,开展计算分析。此监测设施的技术指标为:测量范围是0至200000lx的光照强度,支持测量的可见光范围为400至700mm,测量偏差率<5%。如图2所示,是光电监测技术用于测定大棚种植情况的技术方案。
在此技术方案中,添加速度传感设备、控制设备,可有效监测自动生产农机在田间、大棚各场景的播种情况,尝试从播种速度、播种量、农机行进速度、播种密度等方面,给出精确的监测结果。
③视觉表达监测技术。此种监测技术,能够快速获取播种过程的影像,利用图像处理方式,有效处理相邻种子影像的像素,将其转变成实际种子间距。采取监测数据与标准粒距的对比方式,综合判断粒距间存在的播种遗漏、重复播种等问题。此技术初期用于监测田间作物的疾病情况,改进其技术方案,可用于测定免耕播种情况,间接增强农机自主播种的精确性。采取人工法、视觉表达监测法两种技术,对比农机播种的监测结果。人工法,是采取田间实地检查的形式,对比农机实际消耗的播种量,单位田块内的播种完成度,以此综合判定农机播种精确性。假设单位田块内预计使用f0kg种子,实际消耗的种子量为f1,g=f1与f0的比值为播种完成度。如表3所示,是人工法与视觉表达法的播种监测结果。
对比发现:视觉表达监测法的用时更短,监测结果与实际情况的偏差率仅有0.07%,监测结果具有较高的参考性。
④电容感应式。此种监测技术,主要在播种路径的两侧,添加两个电容传感装置,分析籽粒质量、电容数值的相互关系。借助转换电路形式,尝试以高低电平信号形式,有效传输电容变动值,反馈结果会回传给控制程序。此技术在实践中,会干扰播种,并未推广使用。
3、机具作业面积
监测农机生产范围,主要利用转速传感设备、定位技术,以多普勒频移原理为理论支持,准确获取机具生产方位,防止出现重复生产、遗漏生产的问题,有效增强农耕作业的精细性。转速传感设备、定位技术用于监测农具生产范围时,均能够精确反馈监测结果。在实际应用中,转速传感设备出现运行不畅时,无法保证监测结果的准确性。而定位技术用于监测农业生产,所需成本较高。为此,应选择转速传感设备,低成本获取农机生产范围。配合有效的设备运维机制,积极防范设备运行问题。
4、深松作业监测
①监测思路。参照农机深松的运行走线情况,将农机深松路线进行分类,可划分出规范深松、偏差深松、车辆行驶三种情况。三种深松类型,在深松程度、作业效果等方面,综合反映农机深松效果。为此,在监测数据生成轨迹路线之前,合理划分路线类型,以此保证作业轨迹监测的精确性。
②监测系统的组成。在农机设备后侧,安装上下拉杆,以此控制深松犁具。农机深松生产期间,主要利用液压控制平台,调整犁具深松角度。液压控制平台含有控制程序、悬挂程序两个部分。操控液压程序的装置,是控制犁具位置的关键装备,其组成包括油泵、分配器等各类设施。悬挂装置可用于操控犁具。监测犁具的生产过程,主要利用姿态传感设备,有效采集犁具生产的各个姿态信息,将采集图像回传给终端设备,进行数据分析与解算。然而,在实际生产中,农机深松犁具的类型较多。在实际深松生产中,农机操作员可结合深松需求、生产方案、土壤类型,综合选择犁具。在监测平台中,能够从犁具深松角度、深度等方面,进行生产监测。借助身份验证单元,有效便捷各类犁具的生产数据,以此防止犁具识别数据发生混乱。
③犁具角度采集方法。深松监测流程中,测定犁具作业角度,是较为关键的环节。尝试从犁具下放、犁具抬起各个方面,采集犁具生产角度的各项信息。为了达到此种监测目标,采取统一控制方式。采集角度的传感设备型号为“MPU6050”,此种传感设备,内含陀螺仪、轴加速度测定设备,能够精确获取角度数据。
④犁具图像监测。在实践监测中,共有两种监测形式:一是在生产管理中,调取往期的监测资料;二是农业深松中,自动回传深松监测影像。参照图像监测的具体需求,选择PTC01-30型号的采集单元,全面获取犁具深松的各角度资料。此模块内嵌入一个芯片,具有较强的数字信号处理能力,能够自主补光,保证采集图像的清晰性,支持夜间监测深松生产情况。采集获得的图像资料,以JPEG格式传输至设备终端。
⑤犁具深松监测数据的传输与通信。在监测犁具深松期间,监测平台共设计了四个单元模块:犁具身份验证、角度采集(农机上)、角度采集(犁具上)、影像采集。四个单元模块并未信息交互性,需在车载设备给出监测指令后,各模块相互传递监测结果。采取RS485通信设计方法,进行多点通信连接,最多可建立32个点的交互通信网络,支持数据传输的最远长度为1200m,能够保持100kb/s高速传递监测数据的通信状态。在犁具监测技术的通信规划中,仅需连接四个模块,通信距离不超过农机整长,农机长度远小于1200m,使用RS485通信技术,完成能够达到犁具监测数据的通信需求。
综上所述,将自动播种、秸秆管理、深松作业等田间生产技术,看作较为关键的保护性耕作技术,用以增强保护性田间生产配套设施的新颖性,有效引入新型技术。以国产化生产、较低成本、智能技术为方向,持续完善田间生产机制,展现保护性生产技术的积极作用,获取较高的田间生产量,增加村民实际收入。
(作者单位:112500 辽宁省昌图县现代农业发展服务中心)
猜你喜欢
科教新报(2023年13期)2023-08-15
今日农业(2021年8期)2021-11-28
今日农业(2021年2期)2021-03-19
冶金设备(2020年2期)2020-12-28
中国化肥信息(2020年2期)2020-11-14
今日农业(2020年19期)2020-11-06
金桥(2020年9期)2020-10-27
铁道通信信号(2018年10期)2018-12-06
中国资源综合利用(2017年4期)2018-01-22
中国资源综合利用(2017年4期)2018-01-22