雨刮-风窗摩擦噪声声品质主动控制自适应均衡算法
2024-04-29 03:08范会志冯庆宝王岩松陆仲辉
振动与冲击 2024年8期
范会志, 郭 辉, 冯庆宝, 孙 裴, 王岩松, 陆仲辉
(1. 上海工程技术大学 机械与汽车工程学院,上海 201620; 2. 东营市技师学院 汽车工程系,山东 东营 257091;3. 中国人民解放军32128部队,济南 250000)
随着人们对汽车安全性、舒适性等性能要求日益提高,车内噪声声品质主动控制(active sound quality control, ASQC)成为改善车内声学环境的焦点,通过对控制算法、控制系统等研究,取得了显著成效。
研究人员起初通过降低车内声压级以改善车内声学环境,但声压级并不能完全反映人们对噪声的主观感知,由此提出了声品质的概念[1-3]。为了更好地对声品质进行评价,许多学者提出声品质心理声学评价指标并通过自适应ANC方法来降低车内响度等声品质参数以提高车内声品质[4-7]。姜顺明等[8]通过搭建阶次主动控制试验平台使得响度值明显下降,车内声品质明显提高。此后Kuo等[9]在FxLMS的基础上增加了声音增益因子提出了自适应噪声均衡(adaptive noise equalizer, ANE)算法。基于ANE算法,研究人员通过对特定频带设置增益因子或通过变步长方法来实现声品质的主动控制,从而有效降低响度等声品质参数[10-13]。许多研究人员采用不同的方法研究了车内噪声声品质特征,并通过试验和建立模型等声品质预测方法有效降低了车内噪声响度和尖锐度[14-20]。考虑到人耳对声音的听觉感知,Wang等[21]提出一种基于人类听觉掩蔽效应的车内噪声声品质主动控制算法,使得车内噪声的响度得到明显控制。研究人员分析了不同的声品质主动控制算法对车内声品质的控制效果并对比各主动控制算法的优缺点[22-24]。雨刮-风窗摩擦噪声作为影响车内声品质的重要因素,在反转时刻会产生明显的瞬态冲击噪声[25-26],这严重影响了车内驾乘人员的听觉感受。方晓汾[27]采用有限元法对雨刮器摩擦系统颤振现象进行分析,提出了雨刮片结构的修改方法。黄光涛[28]研究了雨刮系统在不同工况下的振动响应并通过有限元模型进行模态分析,得到了雨刮振动与车内噪声的相干关系。于哲[29]通过对雨刮器建立动力学模型进行仿真计算以分析雨刮器的折返噪声问题。本课题组通过建立雨刮-风窗系统模型和刚柔耦合有限元模型来研究了不同工况下雨刮系统振动噪声问题[30-32]。徐中明等人基于反转噪声、电机噪声和刮刷噪声来建立主观烦躁度多元线性回归模型,可用于雨刮系统的声品质预测[33]。
目前,对于雨刮-风窗摩擦噪声的研究主要集中于产生机理以及动力学分析,但针对雨刮-风窗系统摩擦引起的车内噪声的主动控制方法研究尚未成熟。本文中首先介绍ANE算法和信号分解方法,并基于ANE算法提出一种结合集合经验模态分解的权重约束自适应噪声均衡(ensemble-empirical-mode-decomposition weight constrained adaptive noise equalizer, EWCANE)算法,然后在Matlab环境中建立声品质主动控制模型,使用实车采集到的不同工况下的雨刮-风窗摩擦噪声进行仿真,最后将其主动控制后的声品质参数进行结果分析。
1 基本理论
1.1 ANE算法
ANE算法是在LMS算法的基础上发展而来的,其原理本质也是基于梯度下降法,通过对声音增益因子β进行调控,不断向最优权值迭代靠近,从而实现抵消干扰噪声。如图1所示为ANE算法框图,x(k)是初始噪声信号;p(z)为噪声传递的初级路径;d(k)为经初级路径传递后得到的期望信号;y(k)为抵消期望信号的次级信号;β为声音增益因子,用来控制噪声抵消幅度;e′(k)为伪误差信号,用来调整权重;e(k)为残余误差信号;W(k)为滤波器的权重,生成次级信号。
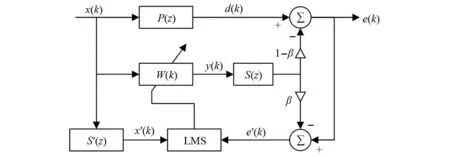
图1 ANE算法框图Fig.1 ANE algorithm block diagram
期望信号d(k)为
d(k)=x(k)*p(k)
(1)
式中,p(k)为初级路径p(z)的脉冲响应函数。误差信号e(k)为
e(k)=d(k)-(1-β)·y(k)*s(k)
(2)
滤波器的输出信号y(k)为
y(k)=wT(k)x(k)
(3)
式中:w(k)是滤波器的权重系数;wT(k)为w(k)的转置。伪误差信号e′(k)为
e′(k)=e(k)-β·y(k)*s(k)
(4)
式中,s(k)为次级路径S(z)的脉冲响应函数。滤波器权重W(k)的系数自适应更新迭代为
w(k+1)=w(k)-μx′(k)e′(k)
(5)
式中,μ为迭代步长,使得滤波器系数向目标函数的反梯度方向更新迭代。
1.2 信号分解理论
集合经验模态分解(ensemble empirical mode decomposition,EEMD)是一种对于非平稳信号分解和重构的常用方法,在应用中避免了经验模态分解(empirical mode decomposition,EMD)的模态混叠现象。这个过程中不需要预先给定任何基函数,自适应地完成分解,对于非平稳信号的处理非常有效。因此,EEMD方法可用于雨刮-风窗摩擦噪声信号,从而降低摩擦噪声的非平稳度,其分解方法如下。
将标准正态分布的白噪声ni(t)加入原始信号序列x(t)中,产生新的噪声信号为
xi(t)=x(t)+ni(t)
(6)
对所产生新的噪声信号xi(t)进行EMD分解,相应的固有模式函数(intrinsic mode function, IMF)分量ci,j(t)和残余信号ri,j(t)为
(7)
利用不相关序列的统计均值为零的原理,将得到的IMF分量进行ci,j(t)集合平均,从而消除所添加的白噪声,得到分解后最终的IMF分量Cj(t)为
(8)
2 EWCANE算法
基于主动控制和模态分解理论方法,本文提出一种雨刮-风窗摩擦噪声声品质主动控制方法。首先,通过EEMD分解方法来获得非平稳度较低的IMF分量并计算各个IMF分量与原有噪声信号的方差比,从而表征不同分量对原有噪声信号的影响程度。然后,通过计算输入信号和误差信号的欧式范数对权重进行约束,降低其瞬态冲击特性。最后,通过方差比的计算结果来调整相应的声音增益因子β,实现对雨刮-风窗摩擦噪声声品质主动控制。其算法框图如图2所示。
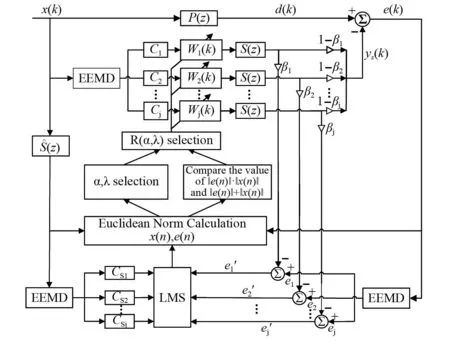
图2 EWCANE算法框图Fig.2 EWCANE algorithm block diagram
经分解得到j个IMF分量C1(k),C2(k),…,Cj(k)表达式为
(9)
式中:L为滤波器长度;W1(k),W2(k),…,Wj(k)为进行滤波的控制器,用来生成次级噪声信号,输出信号ys(k)为
(10)
式中:wi(k)为滤波器的权重系数;s(k)为S(z)的单位脉冲响应;βi为声音增益因子。误差信号e(k)可表示为
e(k)=d(k)-ys(k)
(11)
伪误差信号e′(k)为
(12)
式中,ei(k)为误差信号分解后所得到的分量。自适应滤波器W(k)的权重系数自适应更新为
(13)
式中:i=1,2,…j,μi为各个IMF分量所对应的步长;Csi(k)为输入信号经过次级路径后分解得到的IMF分量。
所提出的EWCANE算法是通过将输入信号和误差信号的欧式范数引入Sigmoid变体函数来设置权重更新的约束参数,适当的约束参数将大大提高算法的收敛速度和稳定性。权重更新的方法为
(15)


3 仿真分析
3.1 噪声采集与分解
本文通过对某品牌新能源汽车进行雨刮-风窗摩擦噪声采集试验,采集时车门窗都处于关闭状态,采集地点位于半消声室内,采集设备为西门子公司的Test.Lab数据采集分析系统。如图3(a)所示,依照GB/T 18697—2002《声学 汽车车内噪声测量方法》[34]的要求对不同工况下的雨刮-风窗摩擦噪声进行采集。此次采集的为主驾驶位和副驾驶位双耳处的噪声,试验工况分别为雨刮在不同刮刷速度(低速、高速)以及风窗玻璃表面干湿程度(干燥、湿润),共4种工况。如图3(b)所示,将测试雨刮刮片的位置共分为内侧、中间和外侧,通过测量雨刮器的尺寸参数并记录相同刮刷次数下所用的时间,得出低速档和高速档的各位置的刮刷速度。实车测试低速档和高速档下的雨刮刮刷速度如表1所示。湿润状态定义为试验前先将玻璃表面湿润,水量为0.25~0.30 L/m2[35]。为保证采集时噪声数据的准确性,每次工况测试3次,每次采样时间设置为10 s。
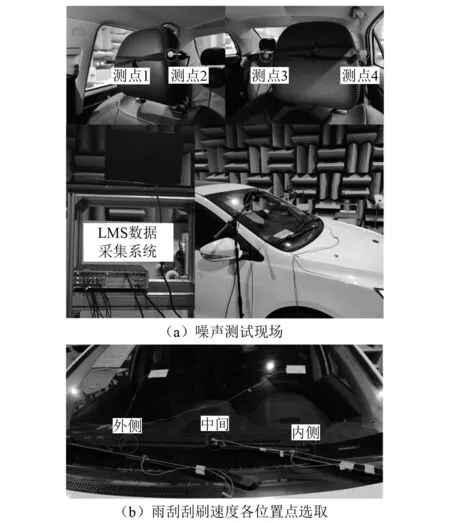
图3 噪声采集示意图Fig.3 Schematic diagram of noise collection
由于采集到的主驾驶位和副驾驶位双耳处的噪声信号趋于一致性,选取主驾驶位右耳侧测点3所采集到的噪声信号来进行表征。本文对主驾驶位右耳侧测点3所采集到的低速湿润和高速湿润两种工况进行研究,对所采集的信号选取5 s数据进行对比分析,通过EEMD方法进行分解来降低雨刮-风窗摩擦噪声的非平稳性。两种工况分解所得到的IMF分量时域结果和频域结果如图4所示,其中图4(a)和(b)分别为低速湿润工况下各IMF分量所对应的时域分解结果和频域分解结果,图4(c)和(d)分别为高速湿润工况下各IMF分量所对应的时域分解结果和频域分解结果。
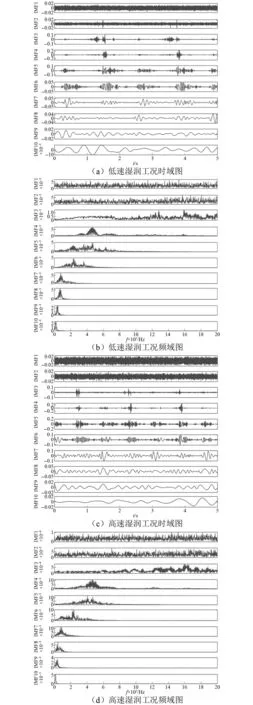
图4 不同工况IMF分量结果Fig.4 IMF component results of different working conditions
将两种工况下得到的IMF分量进行方差计算,与原有噪声信号序列进行方差比值,求得方差比来表征不同IMF分量对原有噪声信号序列的影响程度。两种工况的方差比计算结果如图5(a)和图5(b)所示。在低速湿润工况下,IMF分量3~7相比于其它IMF分量对原有噪声信号序列影响程度较大,因此需要着重加强对IMF分量3~7的主动控制;在高速湿润工况下,IMF分量4~7相比于其它IMF分量对原有噪声信号序列影响程度较大,因此需要着重对IMF分量4~7进行主动控制。
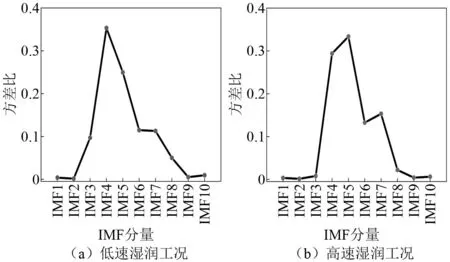
图5 不同工况下IMF分量方差比结果Fig.5 IMF component variance ratio results under different operating conditions
3.2 声品质主动控制
为了验证EWCANE算法对改善两种工况下的雨刮-风窗摩擦噪声声品质的可行性,在Matlab中进行声品质主动控制效果的仿真分析。为了进一步验证其主动控制效果,将ANE算法与EWCANE算法分别对雨刮-风窗摩擦噪声进行主动控制。相应的参数结果如表2和表3所示。
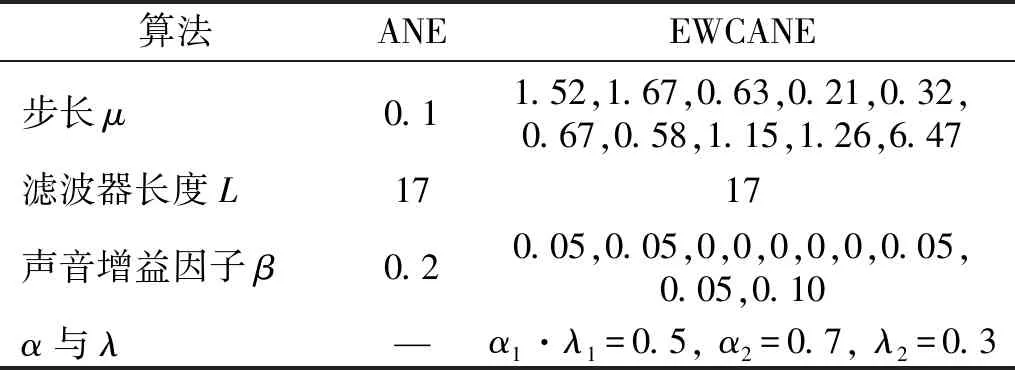
表2 低速湿润工况算法参数值
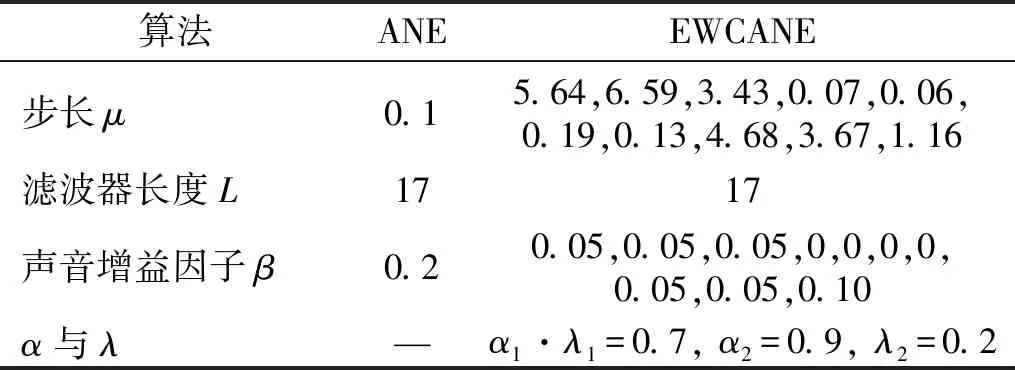
表3 高速湿润工况算法参数值
图6为两种算法在两种工况下声品质主动控制后的时域对比结果,从图6中可以看出,两种算法对雨刮-风窗摩擦噪声均可得到有效的控制,并且在显著降低振幅的同时对原始波形都有一定的保留。但所提出的EWCANE算法采用EEMD方法来对雨刮-风窗摩擦噪声的不同成分进行分解,通过引入输入信号和误差信号的欧式范数自适应进行权重更新,并且对反转时刻产生的瞬态冲击噪声进行权重约束,保证了算法不会由于信号的突变而引起权重发散的问题。因此,所提出的EWCANE算法在稳态误差上明显优于传统的ANE算法,对雨刮-风窗摩擦噪声具有更好的主动控制效果。图7为两种算法在两种工况下声品质主动控制后的频域对比结果,从图7中可以得出结论,在0~2 000 Hz频率范围内,所提出的EWCANE算法明显优于传统的ANE算法,并对于主要集中在0~500 Hz的频率范围内取得了明显的控制效果。
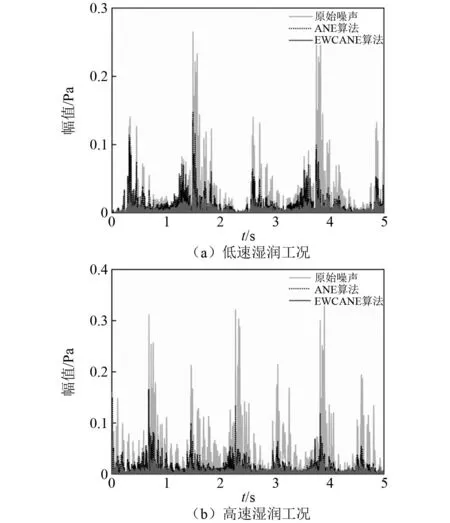
图6 不同工况时域结果图Fig.6 Time domain results of different working conditions
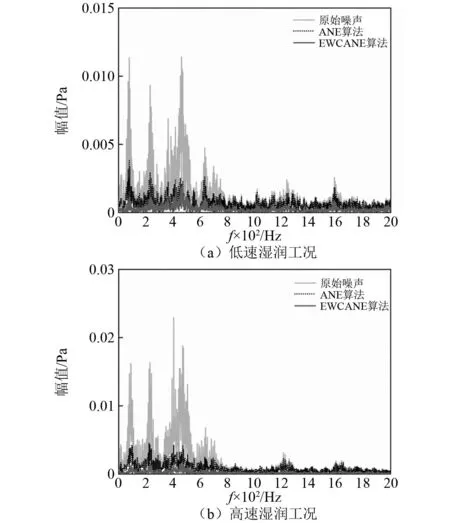
图7 不同工况频域结果图Fig.7 Frequency domain results of different working conditions
算法的收敛速度和稳定性是评估算法优劣的两个重要指标。考虑到要同时兼顾算法的收敛速度和稳定性,将所提出的EWCANE算法与传统的ANE算法在两种不同工况条件下进行收敛速度对比。如图8所示,在两种不同的工况下,所提出的EWCANE算法相比于传统的ANE算法具有较快的收敛速度并且能够保持较低的均方误差。因此所提出的EWCANE算法比传统的ANE算法具有更好的控制效果。
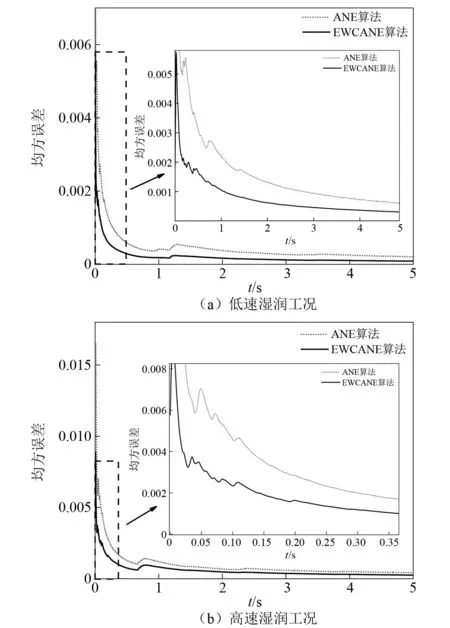
图8 不同工况收敛速度对比图Fig.8 Comparison diagram of convergence speed of different working conditions
心理声学参数可以更好地描述人们对噪声的主观感知。因此,为了进一步体现所提出的算法对雨刮-风窗摩擦噪声声品质的主动控制效果,将传统的ANE算法和所提出的EWCANE算法主动控制后的残余误差信号进行声品质客观参数计算。本文通过使用西门子公司的Test.Lab系统进行计算雨刮-风窗摩擦噪声声品质客观参数指标,包括响度、粗糙度以及尖锐度。
响度主要用来描述人耳所感受到的声音强度,是影响声品质的重要参数。如图9所示,在低速湿润工况下,雨刮刮片反转时所产生的摩擦噪声具有明显的瞬态冲击特性,响度值明显增大。所提出的EWCANE算法相比于传统的ANE算法主动控制后的响度控制效果明显,整体响度曲线比以前更平滑。
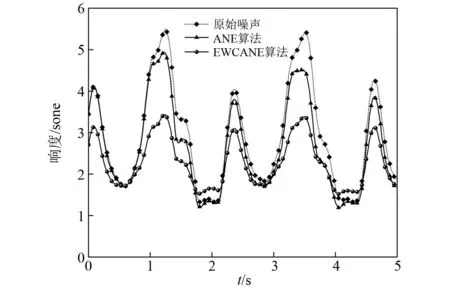
图9 低速湿润工况响度结果Fig.9 Loudness result under low-speed wet working condition
由表4计算结果可知,EWCANE算法主动控制后的噪声总响度值降低了3.25 sones,响度最大峰值降低了2.06 sones,响度值得到明显降低,对雨刮反转时产生的瞬态冲击噪声得到有效抑制。
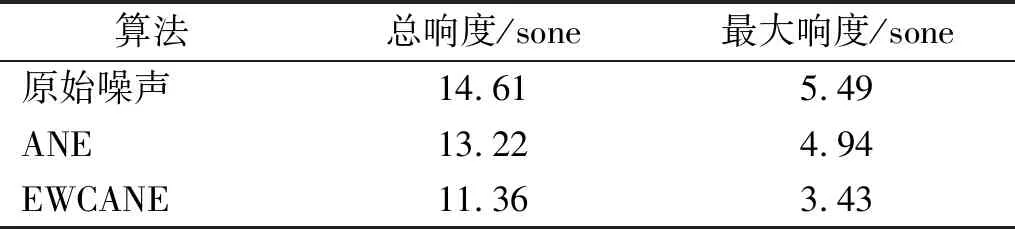
表4 低速湿润工况响度结果
所提出的EWCANE算法相比于ANE算法在噪声粗糙度控制上取得一定的效果,由粗糙度的计算公式可得,粗糙度会随着声音变化量的增大而逐渐升高[36],如图10所示。在进行声品质主动控制后,反转时刻的噪声幅值得到明显降低,使得声音变化量减小,因此,噪声粗糙度得到有效控制。尖锐度主要用来描述高频成分在声音频谱中所占的比例。如图10(b)所示,两种算法在噪声尖锐度控制上有所上升,而所提出的EWCANE算法主要针对于低频成分来进行控制,高频部分所占比例进一步上升。从表5计算结果可以得出结论,EWCANE算法主动控制后的噪声粗糙度值降低了0.29 asper。声品质主动控制后的尖锐度最大值为0.72 acum,而汽车内部乘员通常可以接受尖锐度在2 acum以下的噪声水平[37]。尽管尖锐度的值有所上升,但仍在汽车内部乘员可以接受的范围之内。总的来说,所提出的EWCANE算法对在低速湿润工况下的雨刮-风窗摩擦噪声声品质主动控制上取得了不错的效果。
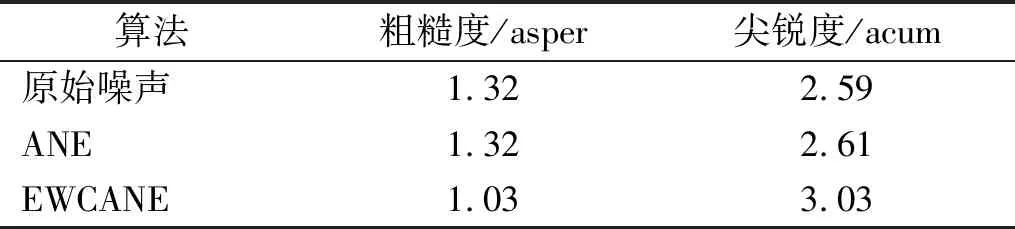
表5 低速湿润工况粗糙度和尖锐度结果
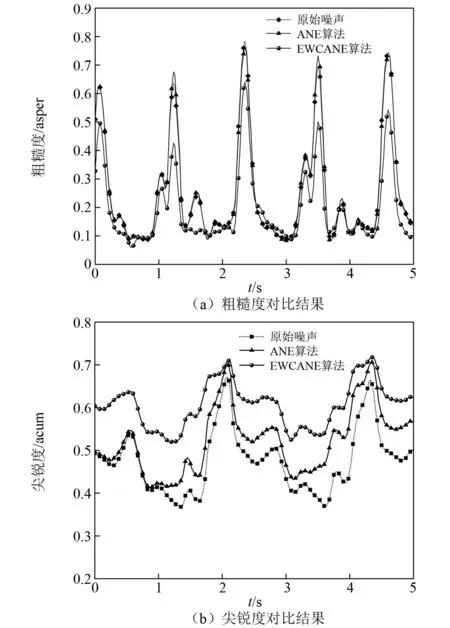
图10 低速湿润工况粗糙度和尖锐度结果Fig.10 Roughness and sharpness results under low-speed wet working condition
如图11所示,在高速湿润工况下雨刮刮片反转时产生的瞬态冲击噪声响度值明显高于低速湿润工况下。所提出的EWCANE算法相比于传统的ANE算法在噪声响度上控制效果明显,响度峰值明显降低,整体响度曲线比以前更平滑。
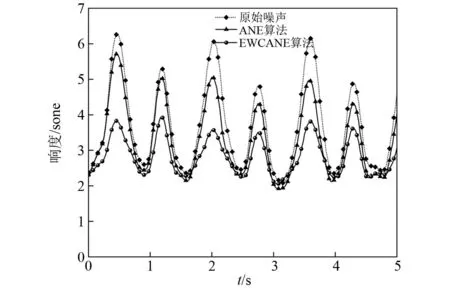
图11 高速湿润工况响度结果Fig.11 Loudness results under high-speed wet working condition
如表6所示,EWCANE算法主动控制后的残余误差噪声总响度值降低了4.27 sones,响度最大峰值降低了2.34 sones,对反转时刻产生的瞬态冲击响度值得到明显下降。
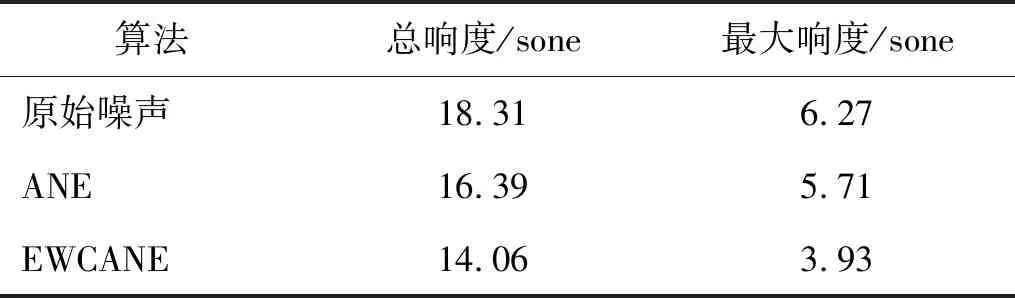
表6 高速湿润工况响度结果Tab.6 Loudness results under high-speed wet condition
如图12(a)所示,所提出的EWCANE算法在粗糙度控制上具有一定的效果。这是由于声品质主动控制后,反转时刻的噪声幅值得到明显降低,使得声音变化量减小,噪声粗糙度得到有效控制。图12(b)为尖锐度的控制结果,由于两种算法在主动控制过程中使高频部分所占比例上升,导致两种算法在尖锐度控制上效果不佳。从表7的计算结果可得,EWCANE算法主动控制后的噪声粗糙度值降低了0.26 asper。高速湿润工况下声品质主动控制后的尖锐度最大值为0.83 acum,但仍在汽车内部乘员可以接受的2 acum范围之内。因此,所提出的EWCANE算法对于高速湿润工况下的雨刮-风窗摩擦噪声声品质主动控制上取得了不错的效果,所提出的EWCANE算法可以针对不同工况下的雨刮-风窗摩擦噪声进行自适应调控控制,具有自适应性强和鲁棒性好等特点。
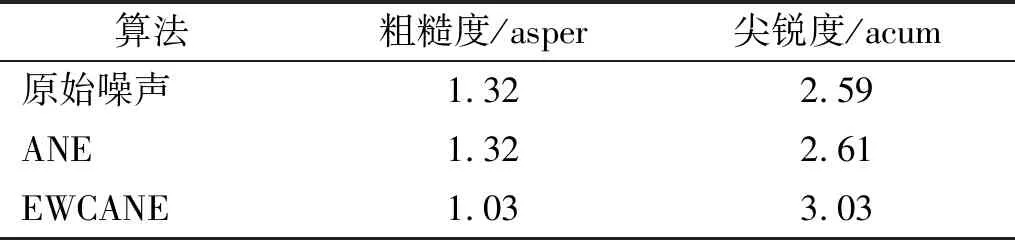
表7 高速湿润工况粗糙度和尖锐度结果
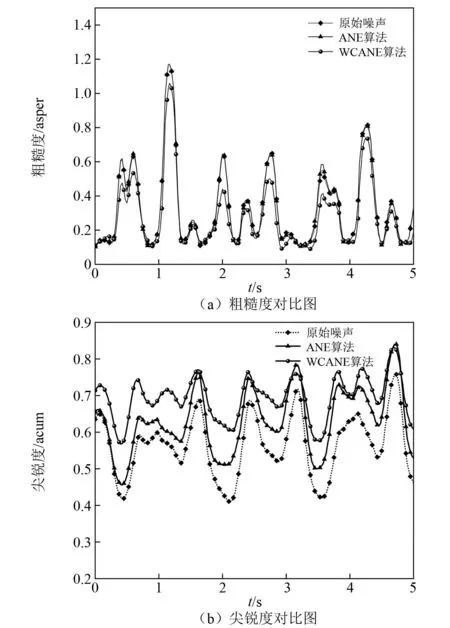
图12 高速湿润工况粗糙度和尖锐度结果Fig.12 Roughness and sharpness results under high-speed wet working condition
4 结 论
为了满足乘客对车内声品质的需求,本文以雨刮-风窗摩擦噪声为研究对象,提出EWCANE声品质主动控制算法,建立声品质主动控制模型,使用实车采集到的不同工况下的雨刮-风窗摩擦噪声进行仿真,将其主动控制后的声品质参数进行对比分析。结果表明,该方法可以有效控制雨刮-风窗摩擦噪声信号。
考虑到响度、粗糙度和尖锐度这三个心理声学参数,分别使用传统的ANE算法和EWCANE算法对两种工况下采集到的摩擦噪声进行声品质主动控制仿真分析。结果表明,两种算法对响度都能有效控制,与传统的ANE算法相比,所提出的EWCANE算法的控制效果更好。在粗糙度控制方面,ANE算法对粗糙度的控制效果不佳,EWCANE算法可以对粗糙度进行有效控制。但由于主动控制过程后高频部分所占比例有所上升,使得两种算法在尖锐度方面控制效果不佳。
因此,所提出的EWCANE算法可以有效控制雨刮-风窗摩擦的噪声响度和粗糙度,是一种可以主动控制雨刮-风窗摩擦噪声声品质的有效方法,对改善车辆内部声品质具有一定的参考价值。
猜你喜欢
中国矿业(2021年12期)2021-12-15
甘肃科技(2020年20期)2020-04-13
模具制造(2019年4期)2019-06-24
中国传媒科技(2018年6期)2018-07-25
制造技术与机床(2017年12期)2017-02-02
材料科学与工程学报(2016年2期)2017-01-15
新闻传播(2016年3期)2016-07-12
工矿自动化(2016年12期)2016-02-22
西部广播电视(2015年5期)2016-01-16
汽车维修与保养(2015年2期)2015-04-17