
面向CIM 和动态交通分析的多源异构数据融合技术研究
2024-04-19 13:56王志成张玉一巴天星常燕燕
电子设计工程 2024年8期
王志成,张玉一,巴天星,常燕燕
(沈阳市规划设计研究院有限公司,辽宁沈阳 110004)
良好的交通状况以及有效的交通管理方案,对城市功能的多样化与良性协同发展具有重要意义。随着理论技术的不断发展,智慧交通系统可以识别出拥堵路段并指挥城市交通。优异的交通指挥系统可以协助城市交通部门对道路进行管控,避免拥堵,从而提升出行效率[1-4]。
实时性是交通流最典型的特征,通常可以使用预测手段对道路进行指挥和疏导。目前最常用的方法就是利用安装在路口的摄像头采集图像数据,或在地面安装压力传感器获取交通流量、机动车辆驾驶速度以及道路占用率等信息,再通过计算推导对交通流量进行准确预测[5-6]。同时,部分地区的交通数据还会被做成API 接口开放至第三方地图软件,以引导人们的出行。虽然现阶段智能交通指挥系统的普及率较高,但由于交通流具有非线性、随机性与实时性等特点,传统的交通指挥系统大多仅能对少量指标进行分析,因此实时预测的准确性偏低。该文通过对多源数据进行异构与融合,做出准确预测,从而缓解城市交通的运行压力。
1 城市交通状况分析模型设计
1.1 多种类数据特征提取算法
长短时记忆时间循环神经(Long Short-Term Memory,LSTM)网络[7-9]是一种由循环神经网络(Recurrent Neural Network,RNN)演化而来的网络模型。该模型具备处理时间特征数据的能力,可以实现对带有时序特征数据的分析。RNN 模型依据时间展开的结构如图1 所示。
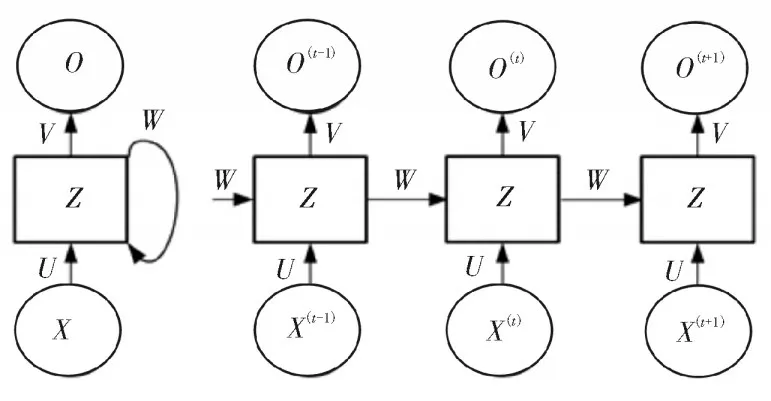
图1 RNN模型结构
在图1 中,RNN[10-12]可以展开为不同时间节点的输入。隐藏层函数的表达式如下:
输出层函数为:
其中,b和c为相应的偏置,f(·)为核函数。
由于RNN 网络在处理大规模数据序列时,会存在梯度消失的问题。因此LSTM 在结构层面对原模型进行了改进,即在RNN 的神经网络中增加了三个门单元。该文所采用的LSTM 结构如图2 所示。
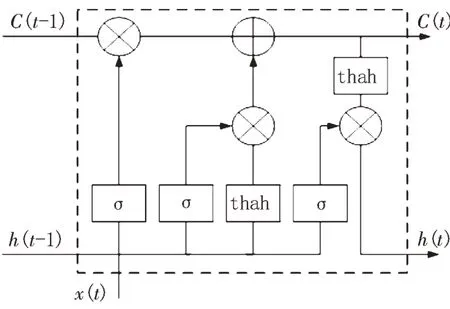
图2 LSTM的网络结构
LSTM 的隐藏层由遗忘门、输入门及输出门组成。遗忘门能对内部神经元的状态信息进行传递,其输入为t-1 时刻的节点状态输出与当前时刻的数据,输出为:
其中,Wf和Uf为遗忘门输入权重值,bf为激活函数的偏置值,σ为Sigmoid 函数。
输入门则主要用来控制输入信息的数量,其由Sigmoid 函数和tanh 函数两部分组合而成。输入门的函数表达式为:
而tanh 函数的表达式为:
单元状态由遗忘门的输出与输入门的输入组成,其可表征为:
其中,⊙为同或逻辑运算。输出门用来传输控制信息,其与输入门具有相同的函数组成形式,如下所示:
因此在t时刻该文所采用LSTM 模型的输出为:
在单向的LSTM 网络中,模型数据仅应用了正向的数据流,但并未考虑逆向数据流。然而在对实际的交通流数据进行预测时,通常需要使用整个时间序列数据。正向与逆向的LSTM 网络分别可以训练t时刻前后的数据,因此将二者的网络相结合,进而得到双向LSTM(Bi-LSTM)网络,其结构如图3 所示。

图3 Bi-LSTM网络结构
1.2 基于DCNN的初始图像特征提取算法
由于该文使用的CIM 系统可以采集到实时的交通图像,而LSTM 算法为循环神经网络,其处理图像的能力较差。因此,使用深度卷积神经网络(Deep Convolutional Neural Networks,DCNN)对初始图像进行预训练,从而提取图像的全局特征。
深度卷积神经网络[13-15]在图像识别与特征提取领域具有较大优势,而DCNN 通过自主学习,能够对图像特征进行深层次的挖掘,网络的主要架构如图4所示。
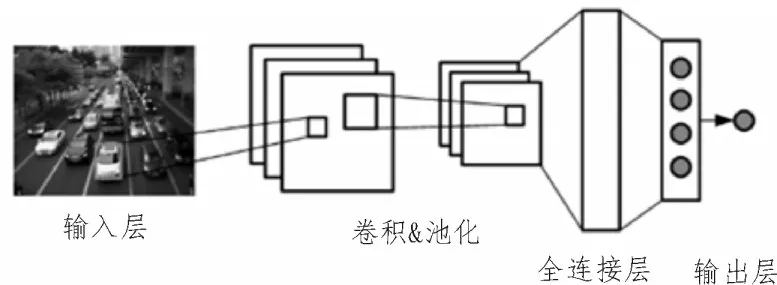
图4 深度卷积神经网络的架构
图4 所示的深度卷积神经网络主要由输入层、卷积层、池化层、全连接层以及输出层组成。其中,输入层为CIM 系统实时采集到的图像数据,该层可以对原始图像进行预处理,从而保障输入图像的归一化。卷积层是深度卷积神经网络的核心计算单元,其包含有多种维度的卷积核,能够对图像特征进行深层次的提取。池化层通过压缩卷积层的输出数据,进而去除特征数据的重叠信息,因此被保留下来的部分即可以代表图像的本质特征,并提升算法的计算性能。而全连接层则将已完成的工作进行了整合,并将最终的特征数据映射至样本空间。
单层DCNN 的结构较为简单,对数据特征的提取并不准确,通常需要对DCNN 的卷积层进行合理的设置与安排。因此,文中使用多尺度的深度卷积神经网络完成图像的特征提取。多尺度的深度卷积神经网络由大尺寸及小尺寸的卷积核组成,大尺寸卷积核可以获得更佳的全局视野,而小尺寸卷积核则能得到更好的局部特征。
由上文可知,多尺度DCNN 获取图像特征需要多层合理的设置,但网络层数过多可能会导致计算资源消耗的急剧上升,网络性能也会发生不同程度的退化。因此,该文在多尺度DCNN 结构中加入了残差网络(Residual Network,ResNet)[16],将浅层及深层的卷积层相连接,进而优化网络的整体性能。残差网络的结构如图5 所示。
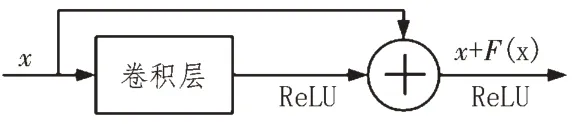
图5 残差网络的结构
可以看到,通过残差模块的作用,输出数据能够综合浅层的输入与深层的输出。同时,与二维卷积层的互相融合还可以对时间维度特征进行更好的把握。因此,该文所采用残差模块可以定义为:
其中,xl-1是第l-1 层残差网络的输出,xl是第l层残差单元的输出,θl是第l层残差单元参数集合,F为残差函数的映射关系。传统ResNet 网络共有3 层,其结构如图6 所示。
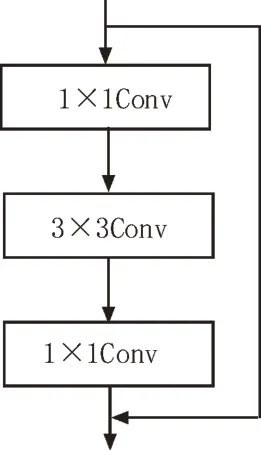
图6 传统的ResNet网络
该文利用多尺度深度卷积神经网络对ResNet 进行改进,在原网络的基础上,在每层残差单元中加入了更多级的残差结构。改进后的ResNet 结构如图7所示。在经过第一层卷积后,经过第二子层时会有三个3×3 的卷积核,而这三个卷积核则可以感受到数据的所有特征信息,这样每个残差网络都能够得到不同尺度的数据特征。
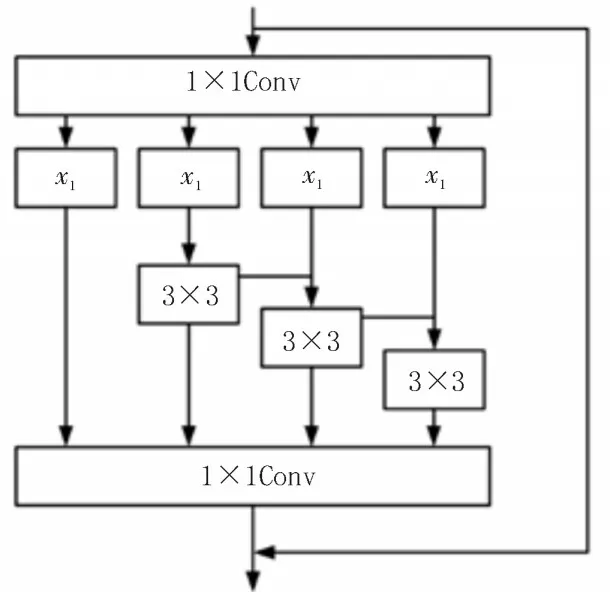
图7 改进后的ResNet网络
综上所述,该文最终设计得到的残差卷积神经网络结构如图8 所示。
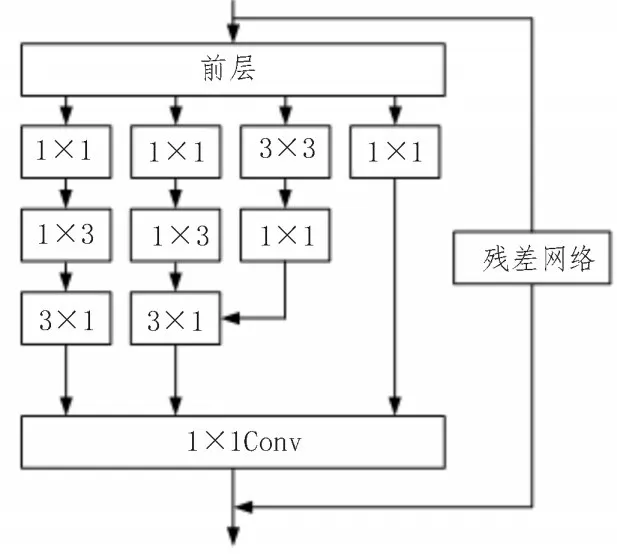
图8 残差卷积神经网络结构
1.3 算法模型设计
该文设计的算法总体模型如图9 所示。模型数据为多源数据,其中,多尺度DCNN 模型为图像特征的提取结构,模型的主要输入部分则为CIM 交通系统提供的城市实时交通流三维模型。而Bi-LSTM 结构为多源数据训练模型,多源数据包括时间、天气与路况信息等。使用全连接层对训练后的数据集进行分类,得到最终的数据标签,进而对城市交通情况进行综合分析,为后续管理措施的制定提供数据支撑。
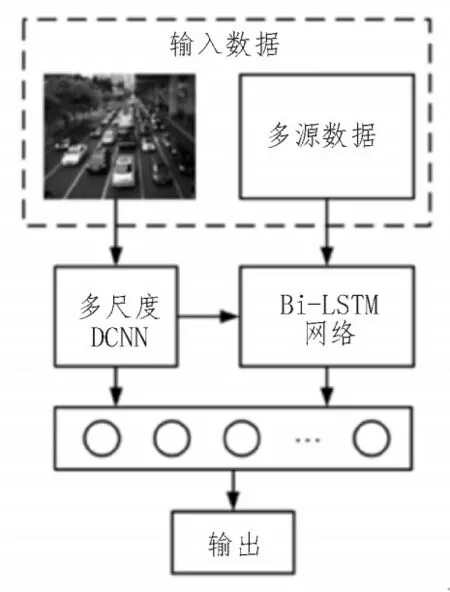
图9 算法总体模型
2 实验与分析
2.1 实验环境搭建
为充分验证文中所提算法的有效性,实验使用某地区2015—2020 年的交通数据作为训练集,并将2021 年的数据作为验证集。多尺度DCNN 模型的输入数据为CIM 三维图像模型集,其可实时反映交通流的状态,并为LSTM 提供其他种类的多源数据。数据集的相关信息如表1 所示。实验使用Python3.6 对算法进行编写,相关软硬件的配置环境如表2 所示。
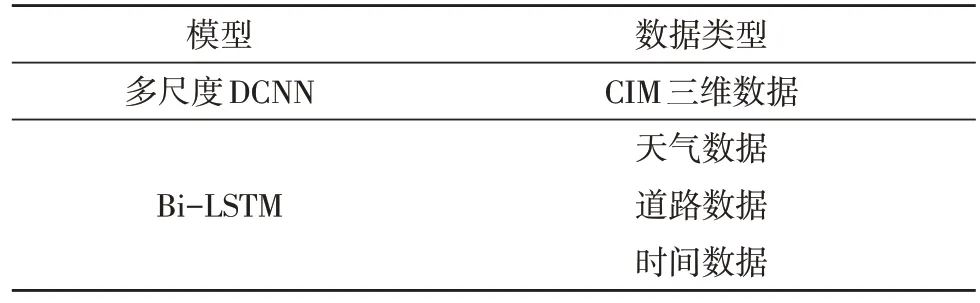
表1 数据集相关信息
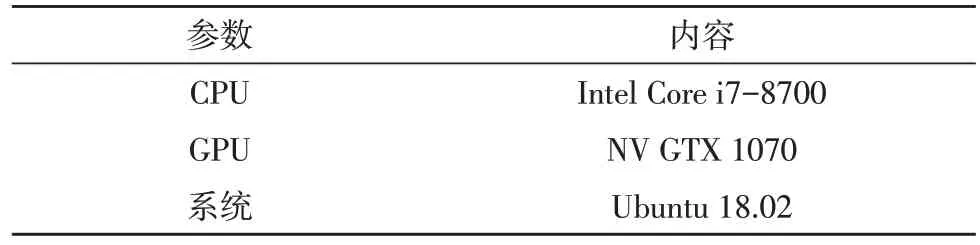
表2 软硬件配置参数
2.2 算法测试
为了验证该文算法的可行性,根据编写的程序对其分类性能进行测试。实验测试指标选择了均方根误差(RMSE)和平均绝对值误差(MAE)进行无单位的数值计算,而对比算法选择了RNN、LSTM、CNN、SVM 和RF 算法。通过对训练集进行模型训练,并使用验证集对结果加以验证,实验结果如表3所示。
由表3 可知,该文算法的RMSE 和MAE 误差指标值分别为7.896 及4.259,与LSTM 原始算法相比误差降低了0.878 和0.955。同时也可以看到,CNN 处理及挖掘时间序列特征的能力较差,RMSE 和MAE的值较高;而传统算法例如RF 算法,在处理时间序列数据时则容易忽略时间特征。
除了使用LSTM 进行多源数据分析外,还使用多尺度DCNN 算法对CIM 三维图像进行处理。多尺度DCNN 可以从三维图像中获得车流的详细特征,因此还需要对该文所提出的多尺度DCNN 模型进行评价。评价指标为准确率、召回率以及F1 值,对比算法则为CNN、DCNN、ResNet、AlexNet 和ZFNet 算法。状态识别结果如表4 所示。
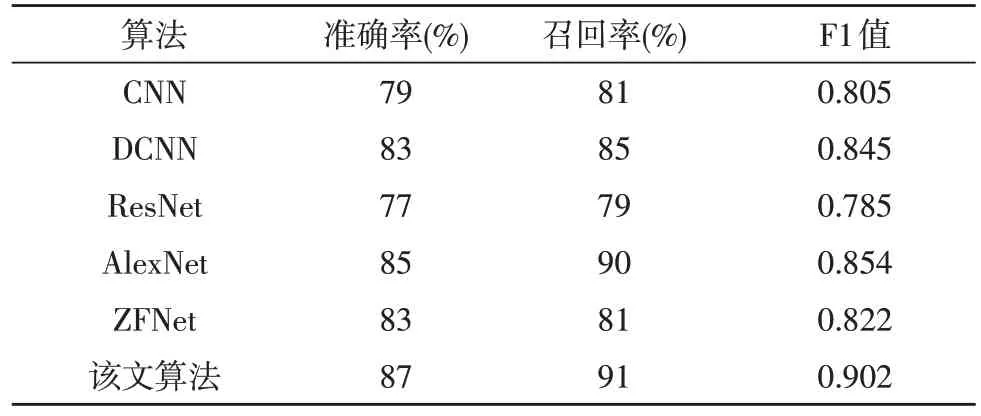
表4 交通状态识别结果
从表4 可以看出,该文算法对交通状态的识别准确率能够达到87%,证明其可以实现对交通三维图像的精准识别及处理。此外,相较于其他对比算法,该文算法的评价指标均为最优。
3 结束语
良好的交通指挥系统,对提升城市的出行效率,减少交通拥堵有着重要的意义。该文基于CIM 系统与多源数据提出了一种动态交通信息分析算法。该算法由多尺度DCNN 模型和Bi-LSTM 模型组成,通过对CIM 三维数据进行训练,进而获取实时的交通情况并获得相应的时序特征。实验测试证明,所提方法的图像识别性能与多源数据分类性能较为理想,具备可供工程应用的实时交通状态识别能力。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2020年10期)2020-11-14
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
自动化学报(2019年6期)2019-07-23
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
太空探索(2016年5期)2016-07-12
河南科技(2015年8期)2015-03-11
时代英语·高三(2014年5期)2014-08-26
