
低速水下机器人水动力试验系统设计
2024-04-17 09:12张亮纪胜军李树珍沈江洁石磊
机床与液压 2024年5期
张亮,纪胜军,2,李树珍,沈江洁,石磊
(1.河北科技师范学院机电工程学院,河北秦皇岛 066004;2.山东华宇工学院机械工程学院,山东德州 253000;3.河北科技师范学院海洋资源与环境学院,河北秦皇岛 066004)
0 前言
水动力特性是水下机器人设计和运动控制的基础[1]。由于水下机器人运动时周围流场复杂,水动力特性分析困难,需要通过试验获取各项水动力系数[2]。国内的水下机器人测试系统一般较为大型[3],如上海交通大学的多功能拖曳水池整体尺寸长300 m、宽16 m、深7.5 m,最大拖曳速度10 m/s[4];中国船舶重工集团公司第七○二研究所拥有的操纵性旋臂水池,直径48 m、深4.5 m,最大角速度1 rad/s,臂端速度12 m/s,可进行船舶、潜水器等的操纵性理论及试验测试,预报各型水中运动体的操纵性能。而国外的测试系统更具有针对性,专业性也更高,如德国宇航院(DLR)研发的小水洞,试验段尺寸0.26 m×0.33 m,长1.26 m,试验速度0.5 m/s[5];ZAHARI M等为研究涡激振动是由湍流旋涡脱落现象引起的,设计了一个为了教学目的的低成本水洞[6]。
本文作者针对低速水下机器人模型试验测取水动力特性的需求,基于相似原理[7],设计一套用于测量小型低速水下机器人水动力系数的试验系统——室内小型低速开口式直流水洞。
1 水洞设计
针对小型水下机器人模型设计的室内小型低速开口式直流水洞如图1所示,主要包括水洞整流段(过渡段二1、扩散段2、蜂窝器3、稳定段4、收缩段5、过渡段一6)、水箱7、阀8、水泵9、水管10、法兰11。

图1 水洞CAD模型
水洞大小主要是由试验段决定的,试验模型大小决定了试验段的大小[8]。本文作者借鉴刘彦伟和刘莹[9]对有边界和无边界场的模拟分析对比,得出阻塞比不得超过25%,否则结果没有实际意义。借鉴英国NPL水洞的设计,试验段的长度通常是模型长度的3倍,以保证模型在更均匀的流场中[10]。
根据以上要求和模型的尺寸比例大小,以100 mm×100 mm×34 mm机器人模型为基准,水洞试验段稳流区域达到300 mm×200 mm×68 mm即可。
2 水洞动力学仿真试验
2.1 水洞模拟条件设定
将SolidWorks建立的水洞三维模型导入Space claim软件,仿真条件设定如下:
(1)求解域设置
在Fluent模块中,检查网格,保证没有负体积网格,默认国际单位制。
(2)物理模型设置
选择标准κ-ε模型,设置计算域材料为水,选择速度入口,过渡段二入口为模型模拟入口,D=80 mm,基于流量相等原则,入口速度为2.6 m/s。
(3)求解方案设置
选择分离求解程序,Simple算法用于压力和速度的耦合。添加用于收敛检查的报告定义——残差曲线和阻力曲线,曲线收敛才说明数值可信。选择初始化,并确保初始化值不能大于10-6,最后进行求解计算[11]。
2.2 水动力学仿真结果分析
通过模拟计算,得到如图2所示流体的运动状态云图。
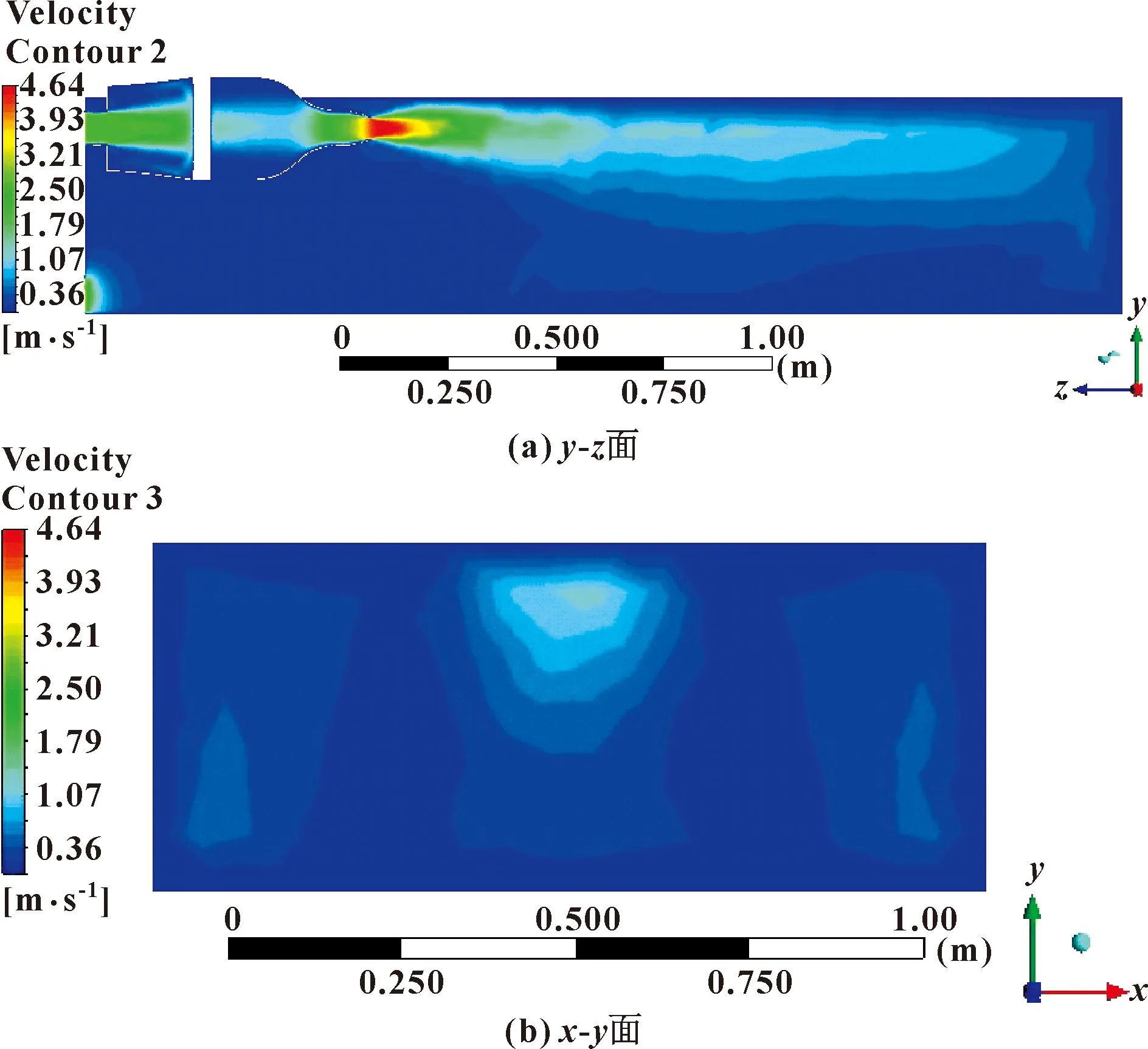
图2 水洞流体运动云图
由图2(a)可知,水流在入口处给定的速度2.6 m/s,水流经过扩散段发散撞入蜂窝网经过水流方向和状态的整合进入稳定段,水流变得有规律且稳定流动,但由于水流经过蜂窝器的大面积摩擦,水流速度降低,在收缩段处水流速度急剧增大到4.64 m/s,经过过渡段喷向开口试验段,水流均匀稳定流动。观察图2(b)可以发现,试验中心速度相同,水流均匀流动,但整体会有向周围扩散方向速度均匀减小的趋势。
为研究水洞试验段是否符合试验要求的范围,分别截取距离试验段入口0.7、0.9、1.1、1.3 m位置的中心速度云图进行分析。不同截面的速度云图如图3所示,选择距离试验段入口0.7~1.3 m处作为试验范围,满足试验条件:(1)最大速度达到2 m/s;(2)满足水流流速均匀性、稳定性的条件;(3)满足试验条件的试验区域大于试验区域最小限制范围(300 mm×200 mm×68 mm),满足阻塞率不大于25%、长度不小于3倍模型长度的要求。
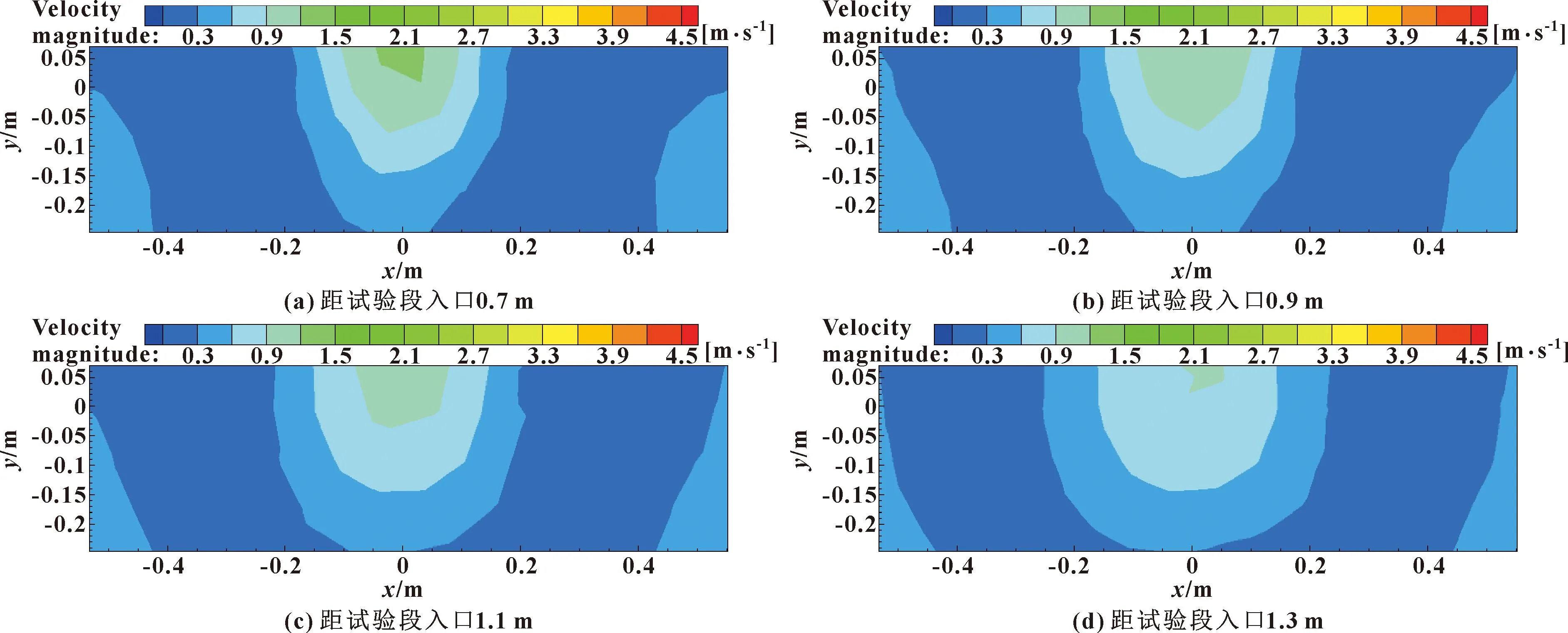
图3 不同截面仿真速度云图
3 水洞试验与标定
3.1 动力系统选型
流量Q用流体横截面积A和流体速度v的乘积来表示
Q=Av
流体横截面积A为过渡段圆形变方形的面积,圆的内接正方形还可以增大水流速度,提高水流品质[12]。圆直径为80 mm,内接正方形的边长取56 mm。经模拟,此处速度取4.1 m/s,试验稳流段方可达到试验速度要求,流量Q=46.3 m3/h。
根据水洞需要的流量和水头损耗,选用U8000变频水压调节器及IRG80-125A型立式单级离心泵(性能参数见表1)构成水洞动力系统,如图4所示,变频水压调节器压力范围为0.05~1.50 MPa,水泵出口处安装不锈钢止回阀,防止水倒流。
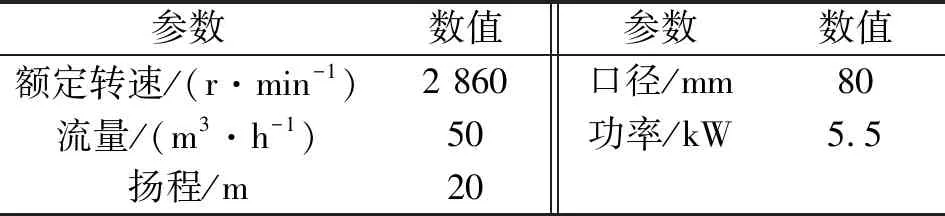
表1 立式单级离心泵性能
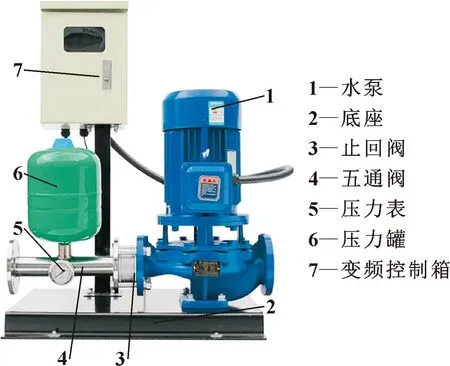
图4 水洞动力系统
3.2 水洞结构及工作原理
水洞样机如图5所示,由水洞动力系统1、控制面板2、水池3、阀4、管道5、过渡段二3.1、扩散段3.2、稳定段3.3、收缩段3.4、过渡段一3.5组成。水洞动力系统1为水的流动提供动力,通过操作控制面板2控制动力系统,通过改变压力的大小来控制水流速度,水池3为开口试验段,管道5连接水池和动力系统,传递水流的作用;图5(b)中各段为水流整流段,决定了水流流场质量。
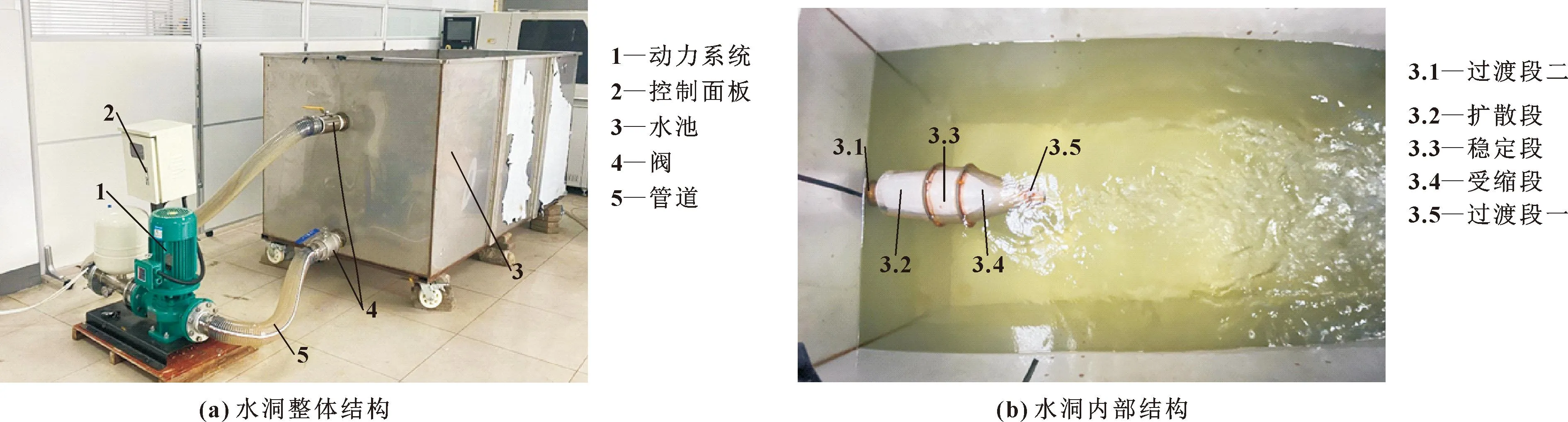
图5 水洞样机
3.3 水洞系统调试
通过改变水泵的水压调节器的压力控制电机转速调节试验段水流流速。为保护水泵电机安全,减少叶片磨损,设置压力0.5~1.0 MPa可调,测量位置为稳流试验段中心,测量并记录10个时均速度并取平均值。压力与水洞流速对应值见表2。

表2 压力与水洞流速对应关系
3.4 水洞流场校核
截面速度分布均匀度和流速稳定性是表示流场质量的两个重要参数[13]。
(1)速度均匀性
速度均匀性表示某一时刻试验段断面上速度分布的均匀性[14]。根据水洞流场模拟云图,在试验段内选取4个截面(距离入口0.7、0.9、1.1、1.3 m),每个截面选取45个点,测试点位置如图6所示,给定2 m/s的水速,将便携式流速仪竖直置于测速点,单点测量各个截面点的时均速度,将数据绘制成云图,如图7所示。

图6 内测试点位置示意
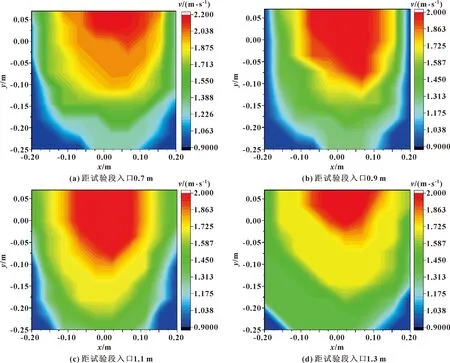
图7 不同截面实测速度云图
分析试验得到的云图可知:水流虽有从中心向四周扩散的趋势,但是中间速度均匀分布,可达到2 m/s的最大水流速度要求,距试验段入口0.7 m处截面内260 mm×185 mm(x(-0.11, 0.15),y(-0.11, 0.075))矩形区域,1.1 m处截面内200 mm×175 mm(x(-0.10, 0.10),y(-0.10, 0.075))矩形区域及1.3 m处截面内200 mm×100 mm(x(-0.10, 0.10),y(-0.025, 0.075))矩形区域,满足试验条件,所以满足试验条件的试验区域大小为600 mm×200 mm×100 mm,位于距离试验段入口0.7~1.3 m处;或试验条件的试验区域大小为400 mm×200 mm×175 mm,位于距离试验段入口0.7~1.1 m处,全部大于最小限制范围(300 mm×200 mm×68 mm),满足阻塞率不大于25%、长度不小于3倍模型长度的要求。计算得到此试验平台的适用范围为:模型长不大于200 mm,模型来流方向的横截面积不大于5 000 mm2。
(2)速度稳定性
速度稳定性是指在一时间段内,每隔一定时间测量试验段内相同位置的流速大致相同。在试验段中心,给定不同速度,每隔10 min测量一组试验数据,共测量6组。由表3可以看出,时均速度最大偏差在±0.2 m/s以内,符合速度稳定性要求。

表3 试验段速度稳定性测量数据 单位:m·s-1
4 结论
基于相似原理设计一种针对低速水下机器人的水动力试验系统。经仿真模拟及试验分析,最终确定了该试验系统适用的模型尺度范围和试验位置。此试验系统适用于速度不大于2 m/s,模型长不大于200 mm,模型来流方向的横截面积不大于5 000 mm2的水动力试验,为低速水下机器人的水动力试验提供了一种方案。
猜你喜欢
西北工业大学学报(2021年3期)2021-07-12
中国农资(2019年44期)2019-12-03
工程与建设(2019年4期)2019-10-10
水电站设计(2018年1期)2018-04-12
名家名作(2017年3期)2017-09-15
中国核电(2017年2期)2017-08-11
光学精密工程(2016年4期)2016-11-07
江西煤炭科技(2015年1期)2015-11-07
中国交通信息化(2015年3期)2015-06-05
小天使·四年级语数英综合(2015年3期)2015-04-20
